15904 skrypt6

CYFROWA FILTRACJA A DAR IACYJNA SZEREGÓW CZASOWYCH _Adaptacyjna parametryzacja onToooNAcMA szEncmy,, 02ASOWV
gdzie inicjnlizacja wynika z (6.64), zaś
©W:r = QnjQn-\.t ■ ■ 0\.T (6 66)
stanowi globalną realizację ./-ortogonalna filtru.
6.3.2. Uaktualnianie w czasie parametrów filtru
Dotychczasowe rozważania umożliwiają realizację /-ortogonalnego filtru para-metryzującego obserwowany szereg czasowy. Jak widać z rvs. 6.5 - 6.7, sygnałem wejściowym filtru są kolejne unormowane próbki tego szeregu W filtrze są przetwarzane jedynie odpowiednie próbki sygnałów błędów w przód i w tył w poszczególnych sekcjach filtru. Dlatego też można by sądzić, ze przedstawiony algorytm parametryzacji szeregów czasowych nadaje się do implementacji w czasie rzeczywistym. Niestety, przeszkodę stanowi wynikająca z Twierdzenia 6.1 metoda estymacji parametrów (tj. zależnych od czasu współczynników Schura) filtru Zgodnie z (6.49). współczynniki te wyrażają się jako
p„+i;r = < e„\zr„ >r= -[«n:0 e„-.i ■ ■ ■ e„j][0 r„,o ■ ■ ■ 'Tt.r-i] =
= -2>„z6.z-, <667>
(=0
Zatem z (6.49) wynika, że do wyznaczenia współczynników Schura p„+i.r, 7 = 0.1,2,... w kolejnych sekcjach filtru (tj.. dla » = 0, .N - I). niezbędne byłoby przechowywanie w pamięci próbek sygnałów [en0,. i {r„o,- ■ •, r„T-1} dla 7 = 0,1,2,. .. co z oczywistych powodów stawiałoby pod znakiem zapytania możliwość realizacji filtru parametryzująccgo w czasie rzeczywistym (nawet w przypadku realizacji wieloproccsowej) Dlatego tez celowe staje się rozważenie możliwości rekurencyjnego uaktualniania w czasie parametrów filtru (co sugeruje zależność (6.67)) Idea takiego uaktualniania w czasie współczynników Schura polegałaby na wyznaczaniu ich w chwili 7 na podstawie wyznaczonej uprzednio wartości w chwili 7 - I. z uwzględnieniem poprawki wynikającej z obserwacji próbek e„ T oraz r„ T ,. tj. wyznaczania ich w sposób rekurencyjny jako
Pn+\:T ~ Pn+l:T~\ + poprawka (6.6S)
Najprostsze wydaje się wykorzystanie w tym celu zależności (6.67). umożliwiającej -jak można sądzić - dekompozycję
< e„|zr„ >y=< e„\zrn >r-i +enjr„.T-i (6 69)
W tym celu rozważmy
|en >T = |cn >T< E„\e„ >t =
- < £"le" >J ' S".7-1 < E"l£" >r^ F-n.T < >^] (6.70)
gdzie
< £n\£n >T — < e„\r.„ >T-l +E2;j- (6.71)
Jednocześnie zauważmy, że
|e„ >r-t = |cn >t-i< e„\e„ >t-\-
— [En;0 < E„\e„ | ... E*;7-_ | < E„\e„ >7^ \ 0 ] =
= ••««,T-|0] (6.72)
skąd wniosek, że niestety
kn>r= \e„>t(< e„\e„ >r-t +4r)~* ź\en>T-\ +[0 ...0e„;7] (6.73)
Z tycłi samych powodów
I-r„ >T = |v„ >T (< v„|v„ >T_, -ł-v^:7-_,)-i yś
jć |zr„ >r_| +[0 ... 0r„.r_, ] (6.74)
Rozwiązanie uaktualniania w czasie współczynników Schura umożliwia wykorzystanie tzw. „operatora różnicowego" [35] postaci
V < ż|y >T=< z|y >r - < -r|y >r-t ’ (6.75)
który w interesującym nas przypadku wyraża się jako
V < »|/,(Sf;„;r)ll’>r=
=< «|P(Sf;„;7-)k >r< rr|P(S^.r)|u >< zr|P(S^„:7-)lzc >7‘ (6.76)
dla dowolnych |u >7 i |u >7■ € Mt Wprowadźmy tzw. „normalizację informacyjną” [35) wektorów błędów w przód
|e„ >r— >T< >T\
i w tyl
|:r„ >7-= |r„ >t< n >t
(677)
-i
144
(CMIBBEEESBBBBllll
CYFROWA Fil TRAĆ. 1A AnAPTAOY.IMA SrPnPnAtfl r7AQOUUVrn Tr
Adaptacyjna parametryzacja ortogonalna szeregów czasowych

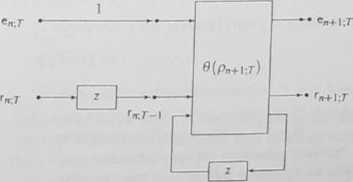
Rys. 6.9. Schematyczna reprezentacja sekcji 9(pn+i;r) filtru adaptacyjnego
Cyprowa filtracja adaptacyjna szeregów czasowych Wówczas mamy
Pn+I;T = Pn+|;7-|( I — e2j-) - (1 - r2.r_,)^ + e„:7-r„ 7_| (6.79)
Wzór (6.79) określa poszukiwaną zależność rekurencyjną uaktualniania w czasie współczynników .Schura. Uzupełniają go poniższe „podwójnie” unormowane zależności na podwyższanie rzędu estymatorów w przód
e<i+l;ż = (1 -P„2+I;r)-*(1 -'l.T-\)~hen;T + Pn+\jrn.T-l] (6 80) |§f
i w tyl
rn+l;r= (1-p2+|;7-) ł(l — ^ [A>+l;7*B.r + tniT-11 (6.81) Jji
Zależności rekurencyjne (6.79)-(6.8l) umożliwiają realizację sekcji /-ortogo-nalnego adaptacyjnego filtru parametryzująccgo Wprowadzając oznaczenia
= (l-p„2+i;T)-i
E« = 0 -ś&rH (6.82) ~
= (• ~rij-1)-^
w celu zwartości zapisu, zaleZność (6.79) przepiszemy jako Pn+l-.r = p„+\ j-[E~'-e„;rr„.r-.t (6.83)
Wzory (6.80)-(6.8l) możemy zapisać wówczas łącznie w postaci macierzowej
|
e«-n;r |
Rn 0 |
Nn+] 0 |
1 Pn+llż |
' 1 0 |
e";7- | |
|
. rn+l;ż |
.0 E„ |
.0 w„+l |
.Pn+llT 1 |
0 z |
.TnJ . |
(6.84)
Sekcję adaptacyjnego filtru innowacyjnego przedstawia rys. 6.8, którą można schematycznie przedstawić na rys. 6.9 lub - analogicznie do (6.56) i rys. 6.4 -jako sekcję z rys. 6.10. Realizację kaskadową adaptacyjnego filtru parametry-zującego przedstawiono schematycznie na rys. 6.1 I Jak widać, w algorytmie adaptacyjnej filtracji innowacyjnej wystarczające jest wykorzystanie jedynie dwóch elementów pamięci na sekcję (przechowujących, odpowiednio, wartości r„;r-1 oraz. p„+|.r_|). Dzięki temu jest możliwa realizacja filtracji adaptacyjnej szeregów czasowych w czasie rzeczywistym (z wykorzystaniem przetwarzania równoległego i potokowego). Przetwarzanie równolegle wynika z możliwości zastosowania N procesorów, z których każdy realizowałby operacje przedsta-
wionę na rys 6.8. W celu zapewnienia przetwarzania potokowego byłoby niezbędne, aby wszystkie operacje przedstawione na wymienionym rysunku były wykonywane w czasie krótszym od odstępu próbkowania obserwowanego sygnału.
Z rozważań przeprowadzonych w niniejszym punkere wynto te zaJe^tóc. (6 79M6.S4). w połączeniu z rys. 6.8 -6.11. umożliwiają rea izację cyfrcwego filtru parametry żującego obserwowany szereg czasowy, z możl.wośctą przetwa-
147
146
Wyszukiwarka
Podobne podstrony:
25436 skrypt8 Cyfrowa hitracja adaptacyjna szeregów czasowych I SZEREGÓW CZASOWYCH Adaptac
66851 skryptA Cyfrowa filtracja adaptacyjna s^en^aów czasowych Estymacja i ączma sk.oreiowamych szf.
58325 skrypt4 Cyfrowa filtracja aoaptacyjha szeregów o7asów- < Cyfrowa filtracja aoaptacyjha szer
skrypt9 Cyfrowa rn trać ia adaptacyjna szeregów czasowych_6 4 Modelowanie stochastyczne szeregów cza
82046 skrypt@ CvrnowA filtracją apupiacyjna szeregów czasowych CvrnowA filtracją apupiacyjna szeregó
51838 skrypt7 _A0_APTACYJNA PAPAMĘinYZACJA ORTOGONALNA ^ Cyfrowa filtracja adaptac
więcej podobnych podstron