18337 instalacje085
2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 52
gdzie x jest podziałką zębową. Jest to dobrze widoczne na rys. 2.24, przedstawiającym wycinek magnetowodu takiego hybrydowego silnika liniowego, który jest w stanie zapewnić małą wartość skoku. Rdzenie są rozmieszczone w ten sposób, że są przesunięte względem siebie o połowę szerokości żłobka bJ2.
Montaż biegnika wymaga wyjątkowo dużej precyzji. Ruch biegni-ka osiąga się dzięki łożyskom walcowym, lub bardziej elegancko — powietrznym. Szczelinę powietrzną wykonuje się o wartości <5 < bż/5.
Silnik wytwarza siłę wskutek przemiany energii pola magnetycznego w szczelinie powietrznej wzdłuż wykonanego skoku. Energia pola magnetycznego jest funkcją drogi. Siła wynosi
F
(2.9)
gdzie dRJdxin jest zmianą reluktancji (oporu magnetycznego) wzdłuż drogi.
Zakładając bipolarne sterowanie obu cewek biegnika rozpatrzmy pracę skokową silnika liniowego, posługując się rys. 2.23. Magnes trwały wytwarza strumień magnetyczny <t>0. Jeżeli elektromagnes l będzie zasilany takim prądem, że wytworzony przezeń strumień składowy wyniesie <PX — <J>0/2, to wypadkowy strumień magnetyczny w szczelinie powietrznej pod biegunem / wyniesie 4>0, a pod biegunem 2 będzie równy zeru. Biegnik pozostanie w tym położeniu nieruchomy, gdyż energia magnetyczna jest w tym położeniu minimalna.
Pragnąc wykonać jeden skok o Axm — b±/2 w lewo, należy elektromagnes / wyłączyć, natomiast zasilić prądem elektromagnes 2. Wówczas strumień wypadkowy w biegunie 3 będzie równy zeru, a w biegunie 4 wyniesie d><> i aby mógł się zamknąć na drodze o najmniejszej reluktancji musi się biegnik przesunąć o bj2 — t/4, tak by biegun 4 ustawił się naprzeciwko zęba części nieruchomej. Jeżeli prąd w uzwojeniu elektromagnesu 2 będzie miał zwrot przeciwny, to biegnik przemieści się o jeden skok Axm — bJ2 — r/4 w prawo.
Pokazany na rysunku 2.22c liniowy silnik skokowy jest znany jako elektrodynamiczny silnik skokowy [12]. Pomiędzy dwoma uzębionymi biegunami znajduje się biegnik wykonany ze szkła, który ma po obu stronach przewody w kształcie meandrów. Po odpowiednim zasileniu pasm uzwojenia impulsami prądowymi ze sterownika występują siły, które powodują, że biegnik porusza się skokowo. Wartość skoku jest równa 1/4 lub 1/8 podziałki zębowej.
W związku z małymi siłami działającymi przy małej indukcyj-ności wirnika oraz prostą budową, silnik taki jest korzystny do pozycjonowania elementów o małej masie.
Zaletą liniowego silnika skokowego jest bezpośrednia zamiana impulsowych sygnałów wejściowych na przemieszczenie liniowe.
Stwierdzono, że liniowe silniki skokowe mają większą dokładność i sprawność oraz lepsze charakterystyki dynamiczne w porównaniu z wirującymi silnikami skokowymi w połączeniu z mechanizmami przetwarzania ruchu obrotowego na postępowy.
Liniowym silnikom skokowym są poświęcone m. in. publikacje [29; 32].
2.6. Uzwojenia silników skokowych
2.6.1. Jednopasmowe silniki skokowe
Najprostszym uzwojeniem silnika skokowego jest uzwojenie jednopasmowe [21; 35]. Jednopasmowe silniki skokowe są najczęściej stosowane do napędu zegarów kwarcowych, a także wszelkiego rodzaju przyrządów pomiarowych. Są na przykład stosowane w czytnikach maszyn matematycznych i w mechanizmach napędu taśm.
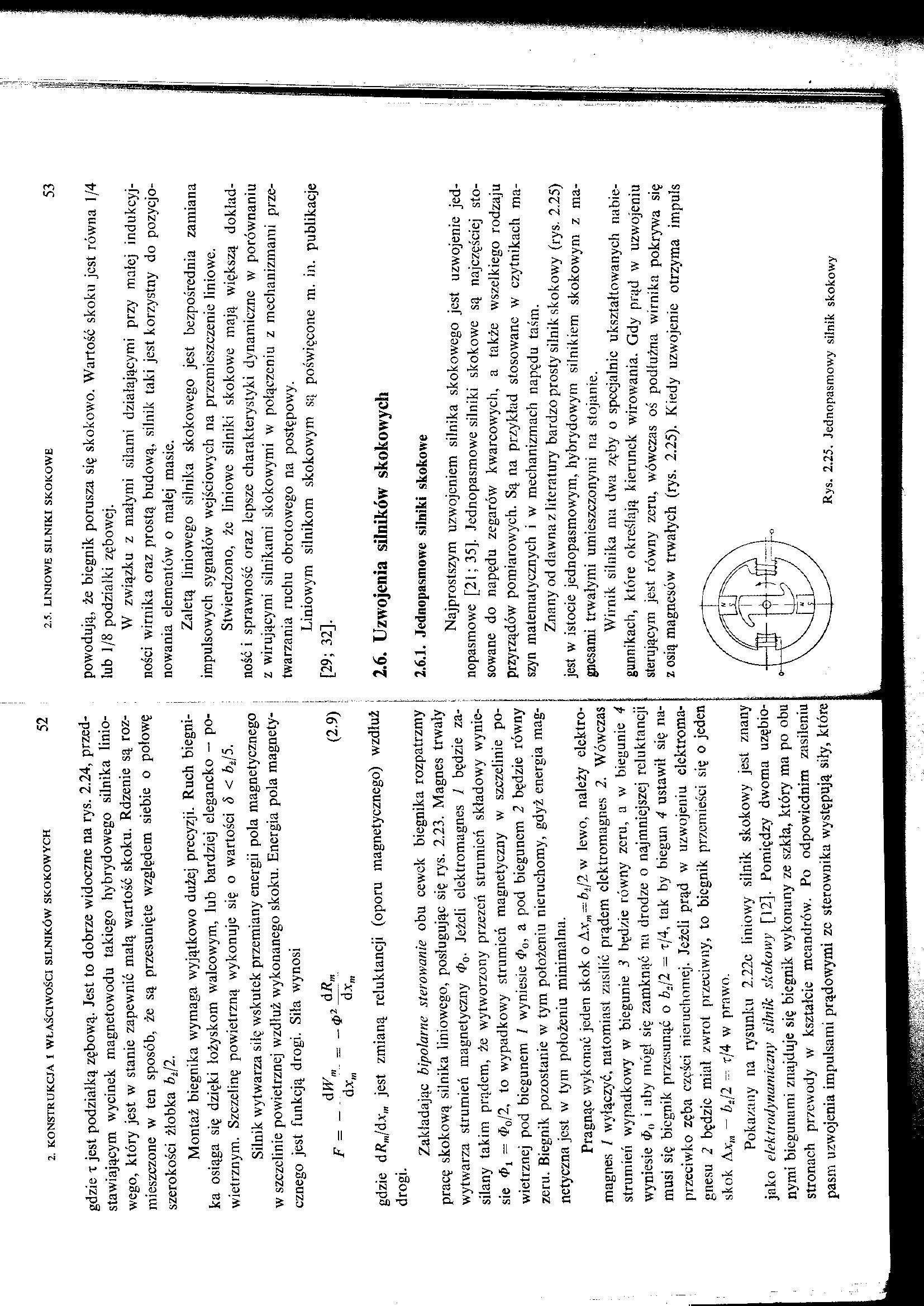
Znany od dawna z literatury bardzo prosty silnik skokowy (rys. 2.25) jest w istocie jednopasmowym, hybrydowym silnikiem skokowym z magnesami trwałymi umieszczonymi na stojanie.
Wirnik silnika ma dwa zęby o specjalnie ukształtowanych nabie-gunnikach, które określają kierunek wirowania. Gdy prąd w uzwojeniu sterującym jest równy zeru, wówczas oś podłużna wirnika pokrywa się z osią magnesów trwałych (rys. 2.25). Kiedy uzwojenie otrzyma impuls
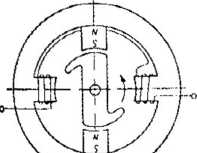
Rys. 2.25. Jednopasmowy silnik skokowy
Wyszukiwarka
Podobne podstrony:
instalacje092 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 66 Jeżeli jest zasilane pierwsze uzwoj
instalacje071 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26 Zasada działania silnika skokowego
instalacje072 2. KONSTRUKCJA l WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 28 Rys. 2.5. Rozkład momentu statyczne
instalacje074 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 32 janie kilkupasmowe uzwojenie steruj
instalacje079 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 42 mieszką metali ziem rzadkich ma tec
instalacje089 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 60 Mogą być stosowane trzy rodzaje uk
instalacje090 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 62 Praca półskokowa w silnikach pięcio
instalacje091 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 64 że jedno z nich musi być łewoskrętn
instalacje073 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 30 W przypadku struktury pokazanej na
instalacje078 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 40 Ponieważ nHc ferrytów jest bardzo d
więcej podobnych podstron