41341 Untitled Scanned 46
- 92 -
Wzbudzenia przerzutników mają więc'postać
|
wo |
- Q.,-c |
zo |
■ Q^*x*a*c |
|
"1 |
- Q2*d |
Z1 |
■ Q2'c |
|
w2 |
- $0-b |
Z2 |
- V® |
Ponieważ w cyklu pracy sygnał e przyjmuje wartość 1 tylko jeden raz, przy czym wtedy Qq - 1, funkcję z2 można uprościć do postaci
z2 - e
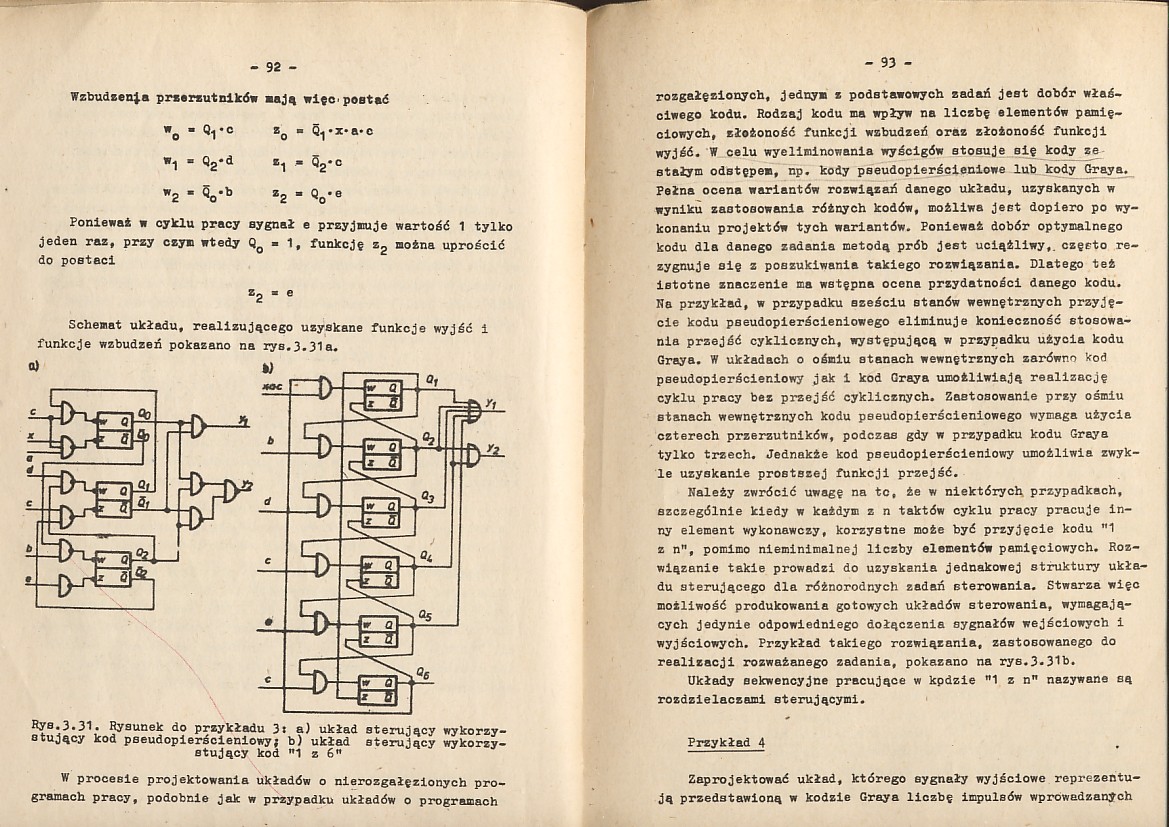
Schemat układu, realizującego uzyskane funkcje wyjść i funkcje wzbudzeń pokazano na iys.3-31a. a) fej
%. o
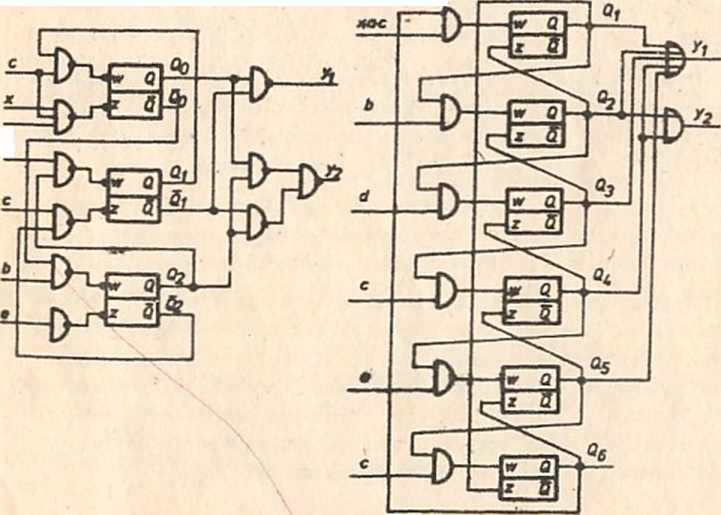
Rys.3.31. Rysunek do przykładu 3: a) układ sterujący wykorzystujący kod pseudopierścieniowyj b) układ sterujący wykorzystujący kod "1 z 6"
W procesie projektowania układów o nierozgałęzionych programach pracy, podobnie Jak w przypadku układów o programach rozgałęzionych, Jednym z podstawowych zadań Jest dobór właściwego kodu. Rodzaj kodu ma wpływ na liczbę elementów pamięciowych, złożoność funkcji wzbudzeń oraz złożoność funkcji wyjść. W celu wyeliminowania wyścigów stosuje się kody ze stałym odstępem, np. kody pseudopierścieniowe lub kody Graya. Pełna ocena wariantów rozwiązań danego układu, uzyskanych w wyniku zastosowania różnych kodów, możliwa Jest dopiero po wykonaniu projektów tych wariantów. Ponieważ dobór optymalnego kodu dla danego zadania metodą prób Jest uciążliwy,, często rezygnuje się z poszukiwania takiego rozwiązania. Dlatego też istotne znaczenie ma wstępna ocena przydatności danego kodu.
Na przykład, w przypadku sześciu stanów wewnętrznych przyjęcie kodu pseudopierścieniowego eliminuje konieczność stosowania przejść cyklicznych, występującą w przypadku użycia kodu Graya. W układach o ośmiu stanach wewnętrznych zarówno kod pBeudopierścieniowy Jak i kod Graya umożliwiają realizację cyklu pracy bez przejść cyklicznych. Zastosowanie przy ośmiu stanach wewnętrznych kodu pseudopierścieniowego wymaga użycia czterech przerzutników, podczas gdy w przypadku kodu Graya tylko trzech. Jednakże kod pseudopierścieniowy umożliwia zwykle uzyskanie prostszej funkcji przejść.
Należy zwrócić uwagę na tc, że w niektórych przypadkach, szczególnie kiedy w każdym z n taktów cyklu pracy pracuje inny element wykonawczy, korzystne może być przyjęcie kodu "1 z n", pomimo nieminimalnej liczby elementów pamięciowych. Rozwiązanie takie prowadzi do uzyskania jednakowej struktury układu sterującego dla różnorodnych zadań sterowania. Stwarza więc możliwość produkowania gotowych układów sterowania, wymagających Jedynie odpowiedniego dołączenia sygnałów wejściowych i wyjściowych. Przykład takiego rozwiązania, zastosowanego do realizacji rozważanego zadania, pokazano na rys.3.31b.
Układy sekwencyjne pracujące w kpdzie "1 z n" nazywane są rozdzielaczami sterującymi.
Przykład 4
Zaprojektować układ, którego sygnały wyjściowe reprezentują przedstawioną w kodzie Graya liczbę impulsów wprowadzanych
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 46 WP0907 Ćwiczenie umiejętności ortograficznych Wyrazy ze zmiękczeniem przez „ &qu
Untitled Scanned 46 J r W ^V u • <
Untitled Scanned 46 (4) stole rewolwer niż najazd raptowny, działający jak wykrzyknik1). Każda z oma
Untitled Scanned 03 92. Delfy. Ruiny świątyni Apollina wzniesionej (na miejscu świątyni archaicznej
79423 Untitled Scanned 46 (4) stole rewolwer niż najazd raptowny, działający jak wykrzyknik1). Każda
Untitled Scanned 46 (3) którego rozwiązanie daje następujące wartości niewiadomych: X1 = 0,09524a£/
Untitled Scanned 90 (2) 92 ZADANIA OPTYMALIZACYJNE INNE ZADANIA 654. 1 );ine są fu
Untitled Scanned 46 Ćwiczenie umiejętności ortograficznych Wyrazy ze zmiękczeniem przez „ "C 1.
67027 Untitled Scanned 46 (2) PLANIMETRIA 49 PLANIMETRIA 49 4 m 333. Na rysunku przedstawiono wzajem
Untitled Scanned 05 2 62. Warunek skuteczności zerowania ma postać: ?? Rs i. 50kQ ^ b. &
42505 Untitled Scanned 32 (8) Ostateczny wykres momentów będzie więc sumą tylko Mp i M3X3. . &
18383 Untitled Scanned 09 Problemy poetyki Doito/etrikifgi A więc słyszymy tu drugi głos Goladkina,
Untitled Scanned 32 (8) Ostateczny wykres momentów będzie więc sumą tylko Mp i M3X3. . &
więcej podobnych podstron