61012 P1020154

i

Henryk heutka
Etement oscylacyjny drugiego rzędu
Różnica pomiędzy elementem inercyjnym II rzędu i elementem oscylacyjnym polega jedynie na różnicy współczynników tłumienia (ęf > I oraz £ < 1) i zmieniając ten współczynnik przez odpowiednie zabiegi techniczne, możemy zmieniać jego charakterystykę i jakość jednego i tego samego urządzenia.
Transmitancja tego elementu przedstawia się następująco:
G(s) »
_ko)2_
s1 + 2 ęcDj + co2
w której: a)r - pulsacja drgań nietluniionych, £ - współczynnik tłumienia. Odpowiedź skokowa elementu jest następująca:
a ■ k - o)2
(s2 + 2ęwms + co2)s '
h(r) — k a-
I-
sin
co
■ t + arctan—-
(121)
gdzie: €ót =(om ■ -Jl-%2 jest tzw. pulsacją drgań tłumionych.
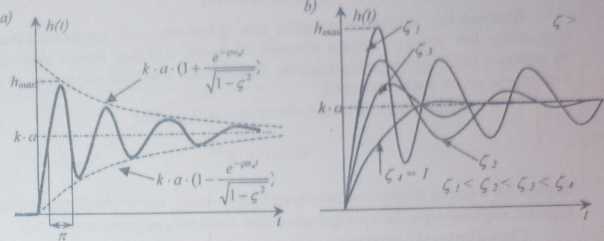
Przebieg czasowy odpowiedzi skokowej elementu jest przebiegiem oscyla-cyjnym o pulsacji coj.
O charakterze oscylacji decyduje współczynnik tłumienia drgań £ (w zależności od wartości Q wykładnik potęgi funkcji wykładniczej we wzorze (121) jest ujemny, dodatni lub równy zeru). Możemy wyróżnić trzy przypadki:
dla 0<£<! i amplituda oscylacji maleje tzw. drgania tłumione (rys. 33.a,b),
dla £=0 występują oscylacje o stałej amplitudzie (rys. 33.c),
dla -[<£<0 amplituda oscylacji rośnie do nieskończoności (rys. 33.d).
Dla ę2> 1 element przestaje być oscylacyjnym i staje się elementem inercyjnym drugiego rzędu (szeregowe połączenie dwóch elementów inercyjnych pierwszego rzędu).
(Oj
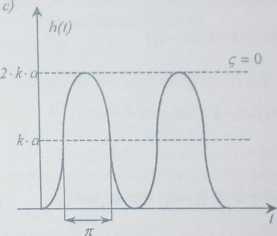

Rys. 33. Charakterystyka skokowa elementu oscylacyjnego drugiego rzędu dla różnych wartości współczynnika tłumienia.
Odpowiedź impulsowa elementu oscylacyjnego drugiego rzędu:
K(s) = —
kto]
(r + 2£g>„s + a>l)s
k(t) = k
sin
0). ■ t + arctan
m
i
77
Wyszukiwarka
Podobne podstrony:
P1020154 i Henryk heutka Etement oscylacyjny drugiego rzędu Różnica pomiędzy elementem inercyjnym II
P1020154 i Henryk heutka Etement oscylacyjny drugiego rzędu Różnica pomiędzy elementem inercyjnym II
DSC00531 (7) Typowe elementy automatyki Człon oscylacyjny drugiego rzędu ar OQp0*AS£dŹ
DSC00533 (9) Typowe elementy automatyki Caon oscylacyjny drugiego rzędu Odpowcdżskote H(s) = a-k-co
038 039 38 Anna Borowska. Rafał Chaba2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rzę
038 039 38 Anna Borowska. Rafał Chaba 2.2.5. Człon oscylacyjny Najprostszy człon liniowy drugiego rz
Morskie Oko jest z tatrzańskich jezior najpiękniejsze, co do powierzchni drugie z rzędu (33 hek
spektroskopia047 94 odgrywa tensor drugiego rzędu R proporqonalny do dxtJdu, zwany tensorem Ramana.
spermatogeneza ” Spermatocyt pierwszego rzędu Spermatocyt drugiego rzędu Pierwszy podział mejotyczny
0929DRUK000017�76 64 ROZDZIAŁ I. UKT. 16. INTERPOLACJA “Wyrażenia postaci A2 są to różnice drugiego
W Ć L P S 2 10 0 0 Treść kursu: Równania różniczkowe zwyczajne pierwszego i drugiego rzędu, równania
88 D. Faust mann ośobdjtfna Rys. 2. Efekt drugiego rzędu - zmiana mimośrodu cięgna podczas obciążeni
12345 jpeg RÓWNANIA RÓŻNICZKOWE LINIOWE NIEJEDNORODNE DRUGIEGO RZĘDU y"+p(x)y +q(x)y = h(x)RÓWN
więcej podobnych podstron