302 (10)
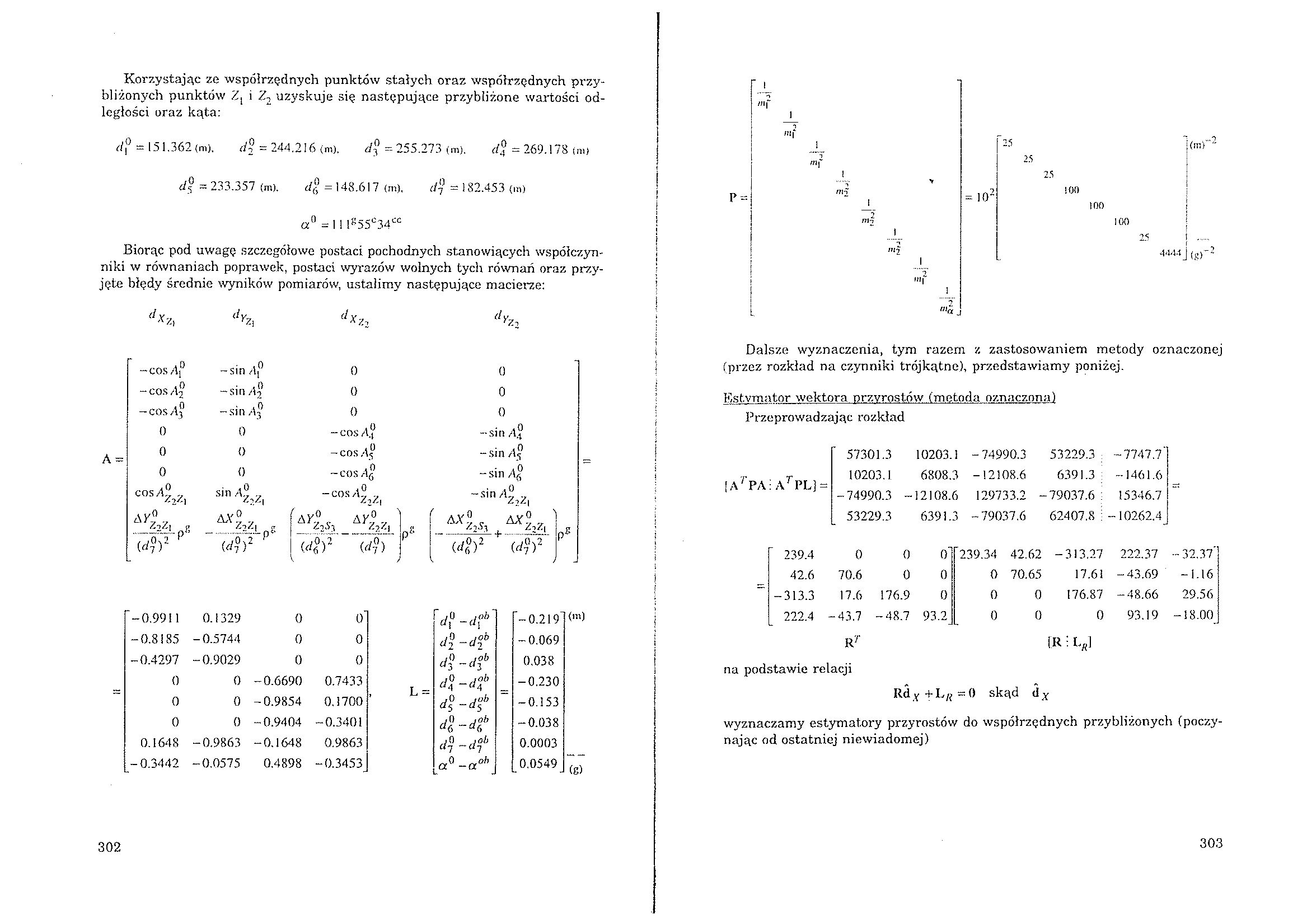
Korzystając ze współrzędnych punktów stałych oraz współrzędnych przybliżonych punktów i Z2 uzyskuje się następujące przybliżone wartości odległości oraz kąta:
= 151.362 (m), d° — 244.216 (m). d° = 2a5.273 (m). (Ią =269.178 tm> d? = 233.357 (m). df = 148.617 (m). d? = ! 82.453 <m)
«° =1! lg55c34cc
Biorąc pod uwagę szczegółowe postaci pochodnych stanowiących współczynniki w równaniach poprawek, postaci wyrazów wolnych tych równań oraz przyjęte błędy średnie wyników pomiarów, ustalimy następujące macierze:
|
dXzz |
dyy-i | |||
|
- cos /Aj0 |
-sin 4,° |
0 |
0 | |
|
- cos 4° |
-sin A o |
0 |
0 | |
|
- COS A° |
-sin 4° |
0 |
0 | |
|
0 |
0 |
— cos Aą |
-sin Aą | |
|
0 |
0 |
-cos 4° |
— sin 4? | |
|
0 |
0 |
— cos 4° |
- sin A® | |
|
cos A?. . |
sin 4° .. *?.*i |
-cos A? |
-sin 4° .. Y-V-\ | |
|
AY° ... 08 |
“'L, |
\ AYy , AYy y l |
( i |
AXy ę AX?yy ) /2-h 42z, ! ; |
|
A 1 P uĄy |
W,0)2 p |
1 (,4)2 W?) I V. ; |
1" l |
(4)2 (4V J |
|
— 0.9911 |
0.1329 |
0 |
0" |
"d? -df |
-0.219 | |||
|
-0.8185 |
-0.5744 |
0 |
0 |
d?-df |
-0.069 | |||
|
-0.4297 |
-0.9029 |
0 |
0 |
Cc 1 |
0.038 | |||
|
0 |
0 |
-0.6690 |
0.7433 |
T — |
</? -df |
-0.230 | ||
|
0 |
0 |
-0.9854 |
OJ 700 |
, ii — |
rf5° -d |
-0.153 | ||
|
0 |
0 |
-0.9404 |
-0.3401 |
.0 ,ob “6 ~d(> |
-0.038 | |||
|
0.1648 |
-0.9863 |
-0.1648 |
0.9863 |
10 j o/j u 7 ~ct-j |
0.0003 | |||
|
-0.3442 |
-0.0575 |
0.4898 |
-0.3453 |
5-- R 0 1 a o 1__ |
0.0549 |
25
<mf‘
p~
/Ii-l
= 10-
"a j
Dalsze wyznaczenia, tym razem z zastosowaniem metody oznaczonej (przez rozkład na czynniki trójkątne), przedstawiamy poniżej.
Estymator wektora przyrostów (metoda oznaczona)
Przeprowadzając rozkład
|
57301.3 |
10203.1 |
- 74990.3 |
53229.3 : |
— 7747.7 |
|
10203.1 |
6808.3 |
-12108.6 |
6391.3 ; |
-1461.6 |
|
-74990.3 |
-12108.6 |
129733.2 |
-79037.6 : |
15346.7 |
|
53229.3 |
6391.3 |
-79037.6 |
62407.8 j |
-10262.4 |
|
239.4 |
0 |
0 |
°] |
'239.34 |
42.62 |
-313.27 |
222.37 |
-32.37' |
|
42.6 |
70.6 |
0 |
Oj |
0 |
70.65 |
17.61 |
-43.69 |
-1.16 |
|
-313.3 |
17.6 |
176.9 |
o| |
0 |
0 |
176.87 |
-48.66 |
29.56 |
|
222.4 |
-43.7 |
-48.7 |
93.2 J |
0 |
0 |
0 |
93.19 |
-18.00 |
r7' [r : Lr\
na podstawie relacji
Rd ^ + P/j — 0 skąd d ^
wyznaczamy estymatory przyrostów do współrzędnych przybliżonych (poczynając od ostatniej niewiadomej)
303
Wyszukiwarka
Podobne podstrony:
10 J. Jirout czołowej) powiązane jest ze współruchem obrotowym (ruch w płaszczyźnie poziomej) oraz z
26 (104) 48 Do obliczenia współrzędnych punktów zwrotu (<fN. *N) wy korzystać moi na metodę wierz
img123 (10) 123 nozoacsoa współrzędnych prostokątnyoh x, y wszystkich punktów poligonowych. Wyrównan
Skrypt PKM 1 00151 302 Przy obrotach dowolnie zmiennych w okresie T o gdzie T L0 = J n(t)cf». o Prz
img141 141 10.3. Języki opisu obrazów (PDL) Shawa a * b oznacza, że: ogon (a) CAT ogon (6) oraz głow
dziennik obliczenie domiarów prostokątnych ze współrzędnych 1 Tabela. Obliczenie domiarów prostokątn
16 Joanna Antczak w wykazie informacje i dane o zakresie korzystania ze środowiska oraz o wysokości
10 (229) Zestawienie trzech rysunków: wzdłużnego zarysu kadłuba ze wzdłużnicami, rysunku wodnicowcgo
Przy sporządzaniu wykresów funkcji trygonometrycznych korzystaliśmy ze wzorów sin (90 s+cc) = cos oc
yn-y.oj *11 — *10 y-y,oy-y, ■ Xo = - 235.68 Y0 = 50.53 Ze współrzędnych obliczam odlegści d20 =
Zadania 1. (a) Korzystając ze wzoru 4 oraz wzoru 1 wyprowadź wyrażenie na iloczyn
KORZYSTASZ ZE ZŁĄCZ POKAŻ TO I ZGARNIJ NAI TUlejkownica oraz ściągacz do izolacji Zestawy
48 (185) 156 11. Korzystając ze wzoru (15.8) oraz uzyskanych wyników obliczyć wiel
4 5 (4) Odpowiedzi 10 Pc = 28(7 + Vl3) cm2 Pole AABC oblicz, np. korzystając ze wzoru Herona. A
P1050399 231 Madej Grochowski[10] się, że eksplikacji /dań o strukturze chociażby p, q służy implika
Korzystając ze wzorów: Cx =CW , Rx -R2~ oraz tgS = 27fCxR„ obliczamy szukane parametry G, Rx oraz tg
więcej podobnych podstron