311 (11)
16 Specyfika nawigacji pilotowe) 311
W układach dwóch par nabieżników instalowane są reflektory radarowe, które są tak ustawione kierunkowo, aby przy zejściu statku z osi toru, spowodowały zmniejszenie intensywności ecłia nabieżnika, co sygnalizuje wskaźnik. Jednocześnie oznacza to, że statek znajduje się bliżej tego nabieżnika.
Dokładność nabieżnika wzrasta w pobliżu pary staw XY lub WZ. W środku, czyli w połowie £>w. błąd jest największy. Dla długości D„ wynoszącej 200 metrów, błąd średni w połowie odległości wyniesie 25 m [25J.
Nabieżnik radarowy odległościowy
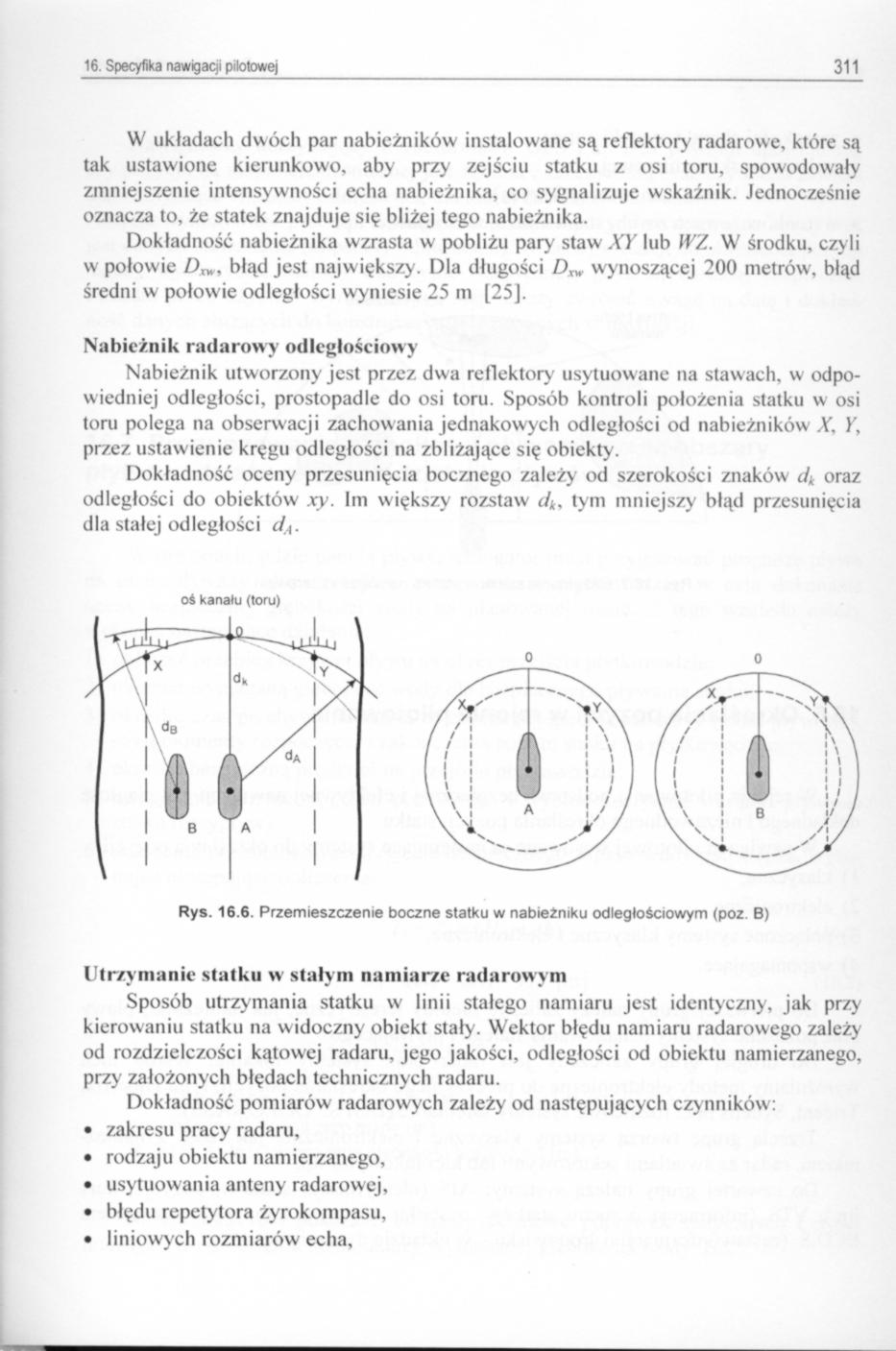
Nabieżnik utworzony jest przez dwa reflektory usytuowane na stawach, w odpowiedniej odległości, prostopadle do osi toru. Sposób kontroli położenia statku w osi toru polega na obserwacji zachowania jednakowych odległości od nabieżników X. Y, przez ustawienie kręgu odległości na zbliżające się obiekty.
Dokładność oceny przesunięcia bocznego zależy od szerokości znaków z/A oraz odległości do obiektów xy. Im większy rozstaw Jk, tym mniejszy błąd przesunięcia dla stałej odległości dA.
oś kanału (toru)
/
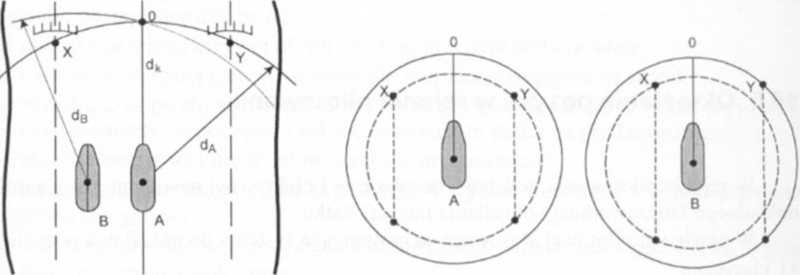
Rys. 16.6. Przemieszczenie boczne statku w nabieźniku odległościowym (poz B)
Utrzymanie statku w' stałym namiarze radarowym
Sposób utrzymania statku w linii stałego namiaru jest identyczny, jak przy kierowaniu statku na widoczny obiekt stały. Wektor błędu namiaru radarowego zależy od rozdzielczości kątowej radaru, jego jakości, odległości od obiektu namierzanego, przy założonych błędach technicznych radaru.
Dokładność pomiarów radarowych zależy od następujących czynników:
• zakresu pracy radaru,
• rodzaju obiektu namierzanego,
• usytuowania anteny radarowej,
• błędu repetytora żyrokonipasu,
• liniowych rozmiarów echa.
Wyszukiwarka
Podobne podstrony:
305 (11) 16. Specyfika nawigaqi pilotowe) 30516.2. Informacje potrzebne do wykonania planu pilotowan
307 (11) 16 Specyfika nawigacji pilotowej 307 podróż. Na rysunku 16.2 pokazano zestaw czynności wyko
313 (11) 16 Specyfika nawigacji pilotowej 313 Nawigatorzy korzystający z odbiorników GPS i ECDiS pow
302 (16) 16. SPECYFIKA NAWIGACJI PILOTOWEJ16.1. Definicje i podział obszarów pływania na akwenach
303 (12) 16 Specyfika nawigacji pilotowej 303 Pilot na mostku, jako osoba fizyczna, wyświadcza usług
309 (12) 16 Specyfika nawigacji pilotowe) 309 1) wykrywalność znaków nawigacyjnych
315 (10) 16 Specyfika nawigacji pilotowej 315 Bardzo ważne dla bezpieczeństwa nawigacji jest bezpośr
323 (11) 17 Specyfika nawigacji oceanicznej 32317.2.2. Statek jako obiekt sterowania Statek jako zło
scandjvutmp151�01 Pielęgnowanie roślin i zwierząt. 311 i układa na nim kwiaty lub liście jeden przy
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
skanuj0108 (11) i 16 Obiektywne przesłanki przekształceń instytucjonalnych na przełomie XIX i XX vr.
więcej podobnych podstron