475 (4)
Załącznik 6 475
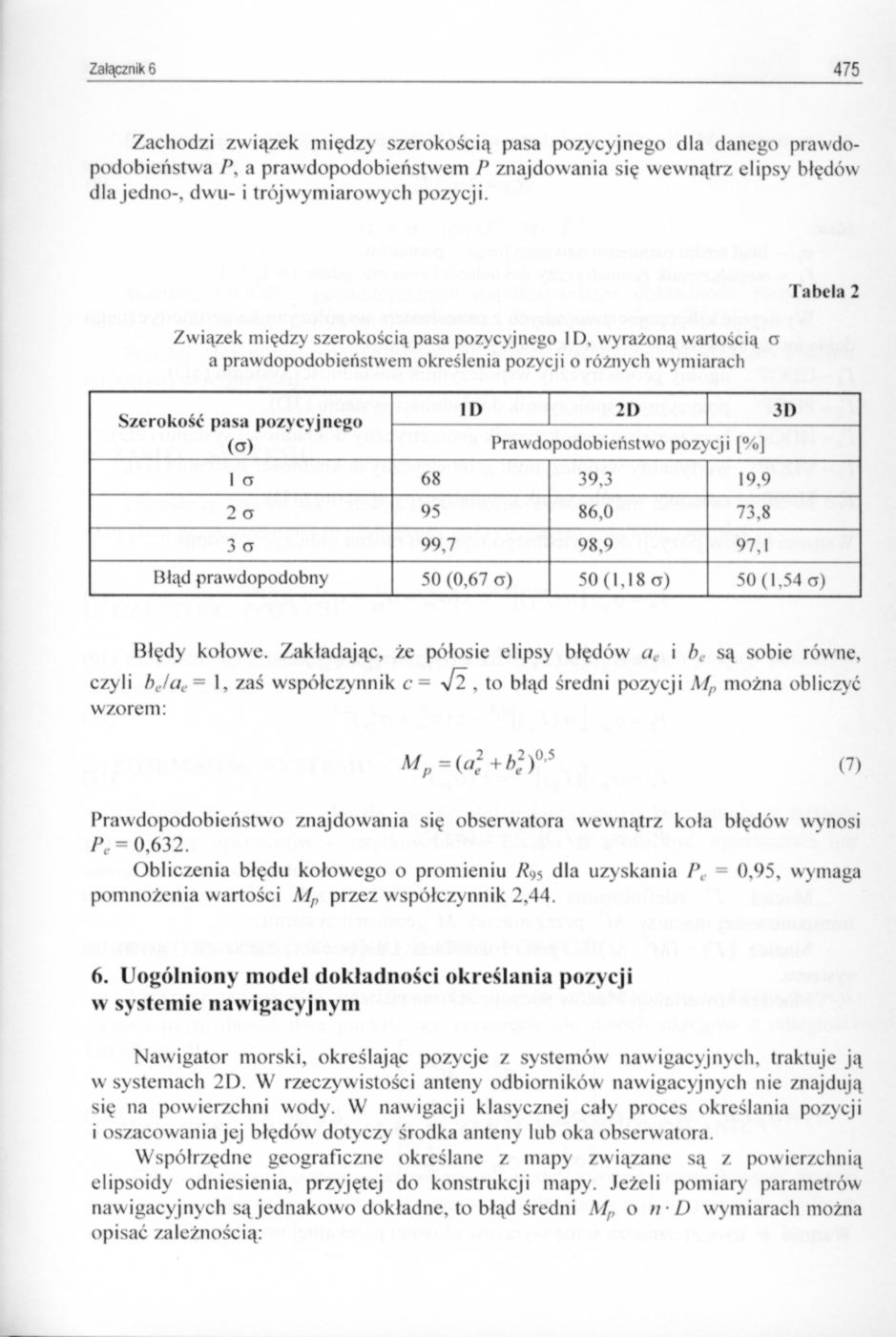
Zachodzi związek między szerokością pasa pozycyjnego dla danego prawdopodobieństwa P, a prawdopodobieństwem P znajdowania się wewnątrz elipsy błędów dla jedno-, dwu- i trójwymiarowych pozycji.
Tabela 2
Związek między szerokością pasa pozycyjnego ID, wyrażoną wartością o a prawdopodobieństwem określenia pozycji o różnych wymiarach
|
Szerokość pasa pozycyjnego (CT) |
ID |
21) |
31) |
|
Prawdopodobieństwo pozycji |%] | |||
|
1 a |
68 |
39.3 |
19,9 |
|
2 a |
95 |
86,0 |
73,8 |
|
3 CT |
99,7 |
98,9 |
97,1 |
|
Błąd prawdopodobny |
50 (0,67 ct) |
50 (1,18 ct) |
50(1.54 o) |
Błędy kołowe. Zakładając, że pólosie elipsy błędów ae i h są sobie równe, czyli />,./«,.= 1, zaś współczynnik c = yfl , to błąd średni pozycji Mp można obliczyć wzorem:
Mp={a*+b?fs (7)
Prawdopodobieństwo znajdowania się obserwatora wewnątrz koła błędów wynosi Pe = 0,632.
Obliczenia błędu kołowego o promieniu /ć95 dla uzyskania P, = 0.95, wymaga pomnożenia wartości Mr przez współczynnik 2,44.
6. Uogólniony model dokładności określania pozycji w systemie nawigacyjnym
Nawigator morski, określając pozycje z systemów nawigacyjnych, traktuje ją w' systemach 20. W rzeczywistości anteny odbiorników nawigacyjnych nie znajdują się na powierzchni wody. W nawigacji klasycznej cały proces określania pozycji i oszacowania jej błędów dotyczy środka anteny lub oka obserwatora.
Współrzędne geograficzne określane z mapy związane są z powierzchnią elipsoidy odniesienia, przyjętej do konstrukcji mapy. Jeżeli pomiary parametrów nawigacyjnych są jednakowo dokładne, to błąd średni Mr o n-D wymiarach można opisać zależnością:
Wyszukiwarka
Podobne podstrony:
Slajd5 s = Or Związek między wielkościami liniowymi i kątowymi dla wybranego punktu bryły sztyw
Slajd6 y dv dt dI dt dco dT Związek między wielkościami liniowymi i kątowymi dla wybranego punk
zdjęcia93 POJĘCIE KSENOBIOTYKU Związek chemiczny, który jest „obcy" dla danego organizmu.
Gdy b — 6...7% — łopaty są wąskie, 6 = 9... 10% —łopaty są szerokie. Grubość łopaty g dla danego
Gdy b — 6...7% — łopaty są wąskie, 6 = 9... 10% —łopaty są szerokie. Grubość łopaty g dla danego
Gdy b — 6...7% — łopaty są wąskie, 6 = 9... 10% —łopaty są szerokie. Grubość łopaty g dla danego
new 47 98 6. Obliczenia gwintów Między wielkościami q(z) i p(z) zachodzi związek(6.22) Uwzględniając
new 47 (2) 98 6. Obliczenia gwintów Między wielkościami q(z) i p(z) zachodzi związek (6.22) Uwzględn
ekg3 3. Związek między krzywą EKG a zjawiskami elektrycznymi zachodzącymi w sercu. 4. Trójkąt Eintho
związek między zmiennymi zachodzi, lecz nie wiemy na czym polega. Pytanie rozstrzygnięcia rozpoczyna
DSCN1599 98 6. Obliczenia gwintów Między wielkościami q(z) i p(z) zachodzi związekP(2,=9(2)SJT-
fizyka0003 25. Wyprowadzić relatywistyczny związek miedzy energia i pedem cząstki
więcej podobnych podstron