431 2
431
10.5. Nieliniowe zadania optymalizacji
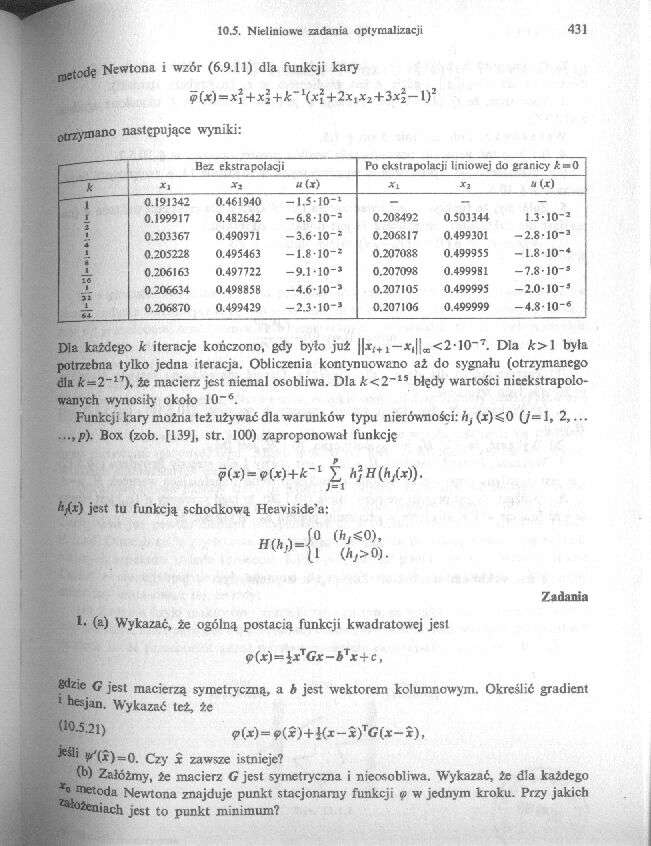
(getodS Newtona i wzór (6.9.11) dla funkcji kary
7p{x)=x\ + x\+k~\x\+2xlx2+'bx\— l)2
^yjnano następujące wyniki:
|
f-- |
Bez ekstrapolacji |
Po ekstrapolacji liniowej do granicy* k-0 | ||||
|
*i |
u(x) |
xL |
■X2 |
u(.x) | ||
|
— l |
0.191342 |
0.461940 |
-I.S-10"1 |
- |
- |
- |
|
i |
0.199917 |
0.482642 |
-6.8-10"* |
0.208492 |
0.503344 |
1.3-10"* |
|
1 |
0.203367 |
0.490971 |
-3.6*10”* |
0.206817 |
0.499301 |
— 2.8-10"* |
|
A |
0.205228 |
0.495463 |
—1.8-10“* |
0.207088 |
0.499955 |
-1.8-10"4 |
|
i |
0.206163 |
0.497722 |
-9.1-10"* |
0.207098 |
0.4999B1 |
-7.8-10"* |
|
0.206634 |
0.498858 |
—4.6-10"* |
0.207105 |
0.499995 |
-2.0-10"3 | |
|
Ł |
0.206870 |
0.499429 |
-2.3-10"* |
0.207106 |
0.499999 |
-4.8-10"6 |
|
Dla każdego k iteracje kończono, gdy było już ||x,+ 1—x,||al |
h' 1 O <Ń V |
Dla k> 1 była | ||||
potrzebna tylko jedna iteracja. Obliczenia kontynuowano aż do sygnału (otrzymanego dla k—2-17), że macierz jest niemal osobliwa. Dla k<2“15 błędy wartości nieekstrapolo-wanych wynosiły około I0~6.
Funkcji kary można też używać dla warunków typu nierówności: hj (jc)<0 (/*»!, 2,... Box (zob. [139], str. 100) zaproponował funkcję
q>(x)=ę{x)+k 1 £ Ay#(#/*))• l=i
fy(*) jest tu funkcją schodkową Heaviside’a:
®W*il (hj>0).
Zadania
l* (a) Wykazać, że ogólną postacią funkcji kwadratowej jest 9 (*)=i*TGx - bJx+c,
?*Z:c‘ ^ jest macierzą symetryczną, a b jest wektorem kolumnowym. Określić gradient 1 tesjan. Wykazać też, że
ę,(x)=9{x)+Hx-x)rG(x-x),
K(*)*0. Czy x zawsze istnieje?
Ułóżmy, że macierz G jest symetryczna i nieosobtiwa. Wykazać, że dla każdego ® -^toda Newtona znajduje punkt stacjonarny funkcji ę w jednym kroku. Przy jakich ■Butlach jest to punkt minimum?
Wyszukiwarka
Podobne podstrony:
427 2 427 10.5. Nieliniowe zadania optymalizacji f-yeflberg (1944) sugerował, aby G(xv) zastąpić mac
429 2 429 10.5. Nieliniowe zadania optymalizacji pominęliśmy wskaźnik v. Zgrabniej — i ogólniej —
425 2 425 10.5. Nieliniowe zadania. opłymaliza^i Wymaga się dobrego przybliżenia początkowego (nic j
Slajd9 CPMKosztySfondtrwanie zadania optymalizacji jest następujące: d <T < D ij — ij — u <
Untitled Scanned 84 (2) 5. ZADANIA OPTYMALIZACYJNEZADANIA WPROWADZAJĄCE Zdający potrafi wykorzystywa
Scan Pic0263 4. Funkcja 10+!gtgx oraz 10+lgctgx dia x w stopniach, minutach i sekundach 4.1. Zakres
423 2 423 10.4. Zadanie transportowe i inne zadania optymalizacyjne Pożądani a transportowego sprowa
430 2 430 10. Optymalizacja W zasadzie te metody można by uogólnić na zadania optymalizacji z dowoln
431 (10) 404 Dress Accessońes —, 1987 ‘Report on the Composition of the Ingots and Axle-Cap’, in Mea
Programowanie nieliniowe Programowaniem nieliniowym nazywamy zadanie optymalizacyjne postaci: I min
D. 198.15.10.112 Zadanie 25. Sieć o adresie IP 192.168.2.0/24 podzielono na cztery podsieci. Jaką ma
IMG166 166 W tak^a razie P2 • U2;) I~ coe 6 m 240 . 10 . 1 - 2400W Zadania 13.6*6, Trójfazowy odbior
więcej podobnych podstron