CCF20090228�028
27
częstotliwości Oj, (ani, gdzie tranzystor posiada właściwości wzmacniające). Parametr K jest często podawany wraz z wartościami współczynników rozproszenia. Można wykazać, że równoważne warunki bezwzględnej stabilności to
K > l, |żł|<t
W przypadku K < I tranzystor* (łub dwuwrotnik) jest potencjalnie niestabilny
11 .Zasady nroiektowania oscylatorów tranzystorowych
Wymagania stawiane tranzystorowi: dostatecznie duży współ •czynnik wzmocnienia (co najmniej kilka dB) przy zadanej częstotliwości pracy, małe szumy Vf (przewaga tranzystorów bipolarnych i HBT!). Niezbędna charakteryzacja : macierz S dla zapewnienia samo wzbudzenia przy zadanej częstotliwości oraz model nieliniowy (+ odpowiedni program komputerowy) do analizy warunku stanu ustalonego i optymalizacji oscylatora.
Konfiguracja: w zasadzie dowolna, najczęściej WE, WB w przypadku tranzystorów bipolarnych oraz WS w przypadku tranzystorów potowych. Możliwość przekształcania macierzy S tranzystora w macierz typu trute/(WFF) daje pełną swobodę badania i porównywania rozmaitych konfiguracji.
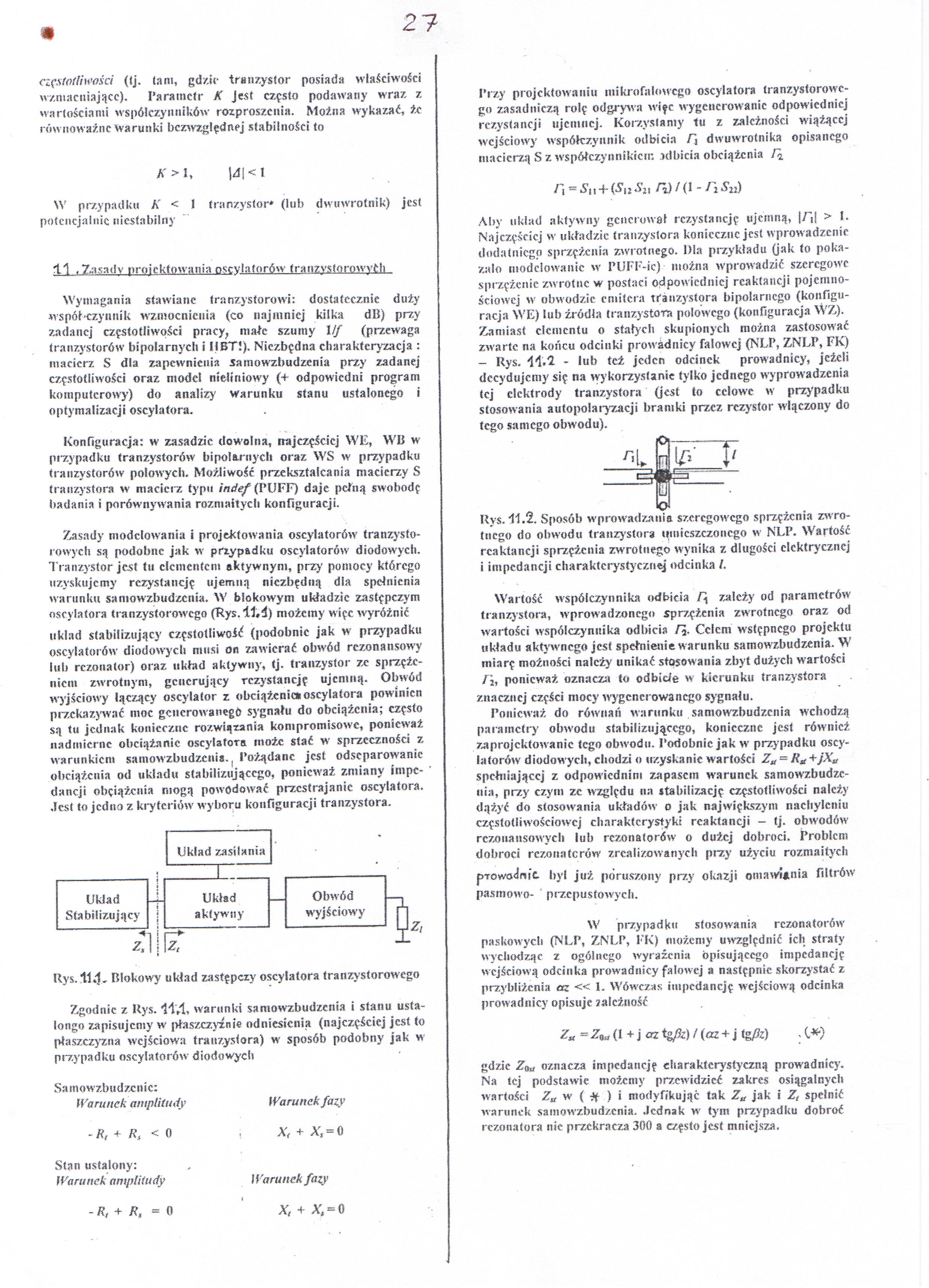
Zasady modelowania i projektowania oscylatorów tranzystorowych są podobne jak w przypadku oscylatorów diodowych. Tranzystor jest tu elementem aktywnym, przy pomocy którego uzyskujemy rezystancję ujemną niezbędną dla spełnienia warunku samowzbudzenia, W blokowym układzie zastępczym oscylatora tranzystorowego (Rys. ii,i) możemy więc. wyróżnić
układ stabilizujący częstotliwość (podobnie jak w przypadku oscylatorów diodowych musi on zawierać obwód rezonansowy lub rezonator) oraz układ aktywny, tj. tranzystor ze sprzężeniem zwrotnym, generujący rezystancję ujemną. Obwód wyjściowy łączący oscylator z obciążenie* oscylatora powinien przekazywać moc generowanego sygnału do obciążenia; często są tu jednak konieczne rozwiązania kompromisowe, ponieważ nadmierne obciążanie oscylatora może stać w sprzeczności z warunkiem samowzbudzenia., Pożądane jest odseparowanie obciążenia od układu stabilizującego, ponieważ zmiany impc-dancji obciążenia mogą powodować przcstrajanic oscylatora. Jest to jedna z kryteriów wyboru konfiguracji tranzystora.
Rys. Iltj, Blokowy układ zastępczy oscylatora tranzystorowego
Zgodnie z Rys. 11,1, warunki samowzbudzenia i stanu usta-longo zapisujemy w płaszczyźnie odniesienia (najczęściej jest to płaszczyzna wejściowa tranzystora) w sposób podobny jak w przypadku oscylatorów diodowych
Sa mowzbudzcoic:
Warunek amplitudy Warunek fazy
-R, + R, < 0 , X, + X, = o
Stan ustalony:
Warunek amplitudy Warunek fazy
Przy projektowaniu mikrofalowego oscylatora tranzystorowego zasadniczą rolę odgrywa więc wygenerowanie odpowiedniej rezystancji ujemnej. Korzystamy tu z zależności wiążącej wejściowy współczynnik odbicia /j dwuwrotnika opisanego macierzą S z współczynnikiem Kibicią obciążenia /j
/j = óji +-{.sj} óji r%) /(i - f\Su)
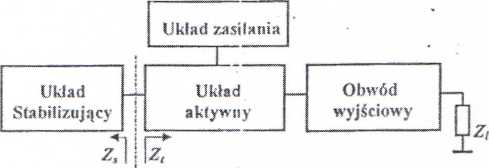
Aby układ aktywny generował rezystancję ujemną, |/jj > i. Najczęściej w układzie tranzystora konieczne jest wprowadzenie dodatniego sprzężenia zwrotnego. l)ia przykładu (jak to pokazało modelowanie w PUFF-ic) można wprowadzić szeregowe sprzężenie zwrotne w postaci odpowiedniej rcakfancji pojemnościowej w obwodzie emitera tranzystora bipolarnego (konfiguracja WE) lub źródła tranzystora potowego (konfiguracja W/,). Zamiast elementu o stałych skupionych można zastosować zwarte na końcu odcinki prowadnicy falowej (NLP, ZNLP, FK) - Rys. 14.1 - lub też jeden odcinek prowadnicy, jeżeli decydujemy się na wykorzystanie tylko jednego wyprowadzenia tej elektrody tranzystora (jest to celowe w przypadku stosowania autopolaryzacji bramki przez rezystor włączony do tego samego obwodu).
Rys. 11.2. Sposób wprowadzania szeregowego sprzężenia zwrotnego do obwodu tranzystor# umieszczonego w NLP. Wartość rcaktancji sprzężenia zwrotnego wynika z długości elektrycznej i imncdancii charakterystycznej odcinka l.
Wartość współczynnika odbicia zależy od parametrów tranzystora, wprowadzonego sprzężenia zwrotnego oraz od wartości współczynnika odbicia /}. Celem wstępnego projektu układu aktywnego jest spełnienie warunku samowzbudzenia. W miarę możności należy unikać stosowania zbyt dużych wartości fi, ponieważ oznacza to odbicie w kierunku tranzystora znacznej części mocy wygenerowanego sygnału.
Ponieważ do równań warunku samowzbudzenia wchodzą parametry obwodu stabilizującego, konieczne jest również zaprojektowanie tego obwodu. Podobnie jak w przypadku oscylatorów diodowych, chodzi o uzyskanie wartości Za = !<„ + jXu spełniającej z odpowiednim zapasem warunek samowzbudzc-nia, przy czym ze względu na stabilizację częstotliwości należy dążyć do stosowania układów o jak największym nachyleniu częstotliwościowej charakterystyki rcaktancji - tj. obwodów rezonansowych lob rezonatorów o dużej dobroci. Problem dobroci rezonatorów zrealizowanych przy użyciu rozmaitych
pTov«ł<Wc. był już poruszony przy okazji omawiania filtrów pasmowo- ‘ przepustowych.
W przypadku stosowania rezonatorów paskowych (NLP, ZNLP, FK) możemy uwzględnić ich straty wychodząc z ogólnego wyrażenia Opisującego impcdancję wejściową odcinka prowadnicy fałowej a następnie skorzystać z przybliżenia az « I. Wówczas impcdancję wejściową odcinka prowadnicy opisuje zależność
Z„ = Z^(Ii + j cątg/fe)/(az + j tg/k) - l*}
gdzie Z„„ oznacza impcdancję charakterystyczną prowadnicy. Na tej podstawie możemy przewidzieć zakres osiągalnych wartości Z„ w ( żf ) i modyfikując tak Zu jak i Z, spełnić warunek samowzbudzenia. Jednak w tym przypadku dobroć rezonatora nic przekracza 300 a często jest mniejsza.
X, 4 x,=o
-R, + R, = 0
Wyszukiwarka
Podobne podstrony:
PółproduktyProso Proso jako jedyne ze zbóż posiada właściwości odkwaszające organizm. Jest
76742 Obraz 7 (27) 6.5. Bromianometria Bromian(V) potasu w środowisku kwaśnym posiada silnie utlenia
79971 P1020782 samej. Musisz. To wyniszczająca kampania bez końca, a gdzie spełnienie, gdzie poczuci
CCF20090105�009 1L i tej słyszącej tam, gdzie grają nieprzerwanie Evans (fortepian), Eddie Gomez (ba
CCF20090109�008 V 27. Mężczyzna z obustroimym powiększeniem sulków. W wykonanych badaniach stwierdzo
CCF20090128�003 14. Wspólną cechą w budowie i rozwoju lamblii jelitowej i rzęsistka pochwowego nie j
CCF20090128�013 27. Dwupłatów} jajnik, zdolność samodzielnego pełzania to charakterystyczne cechy&nb
CCF20090831�147 270 Rozum pustym przedmiotem w ogóle) ani tak, jak w wolnej samowiedzy (tzn. nie jes
CB i rad 222 222 XIV. ZDOBYWAMY UPRAWNIENIA AMATORSKIETabela 27. Częstotliwości i dozwolone emisje
CCF20071030�021 (2) 6 Tryb oznajmujący i tym samym petni raczej funkcję opisową (nazywany też jest c
CCF20071030�021 (3) 6 Tryb oznajmujący i tym samym pełni raczej funkcję opisową (nazywany też jest c
CCF20080703�020 27 n pę- acza- prze- niko- [o żył ,ączy sęsto bio-i pa-lied- /
CCF20080704�023 27 i od tętnic ?tnic pier- ty piersio- brzusznej. /e dolnychUNACZYNIENIE I UNERWIENI
CCF20080708�022 Działcrtie przy zapisie Sygna! m.cz. podany na wejście wzmacniany jest przez tranzys
CCF20080709�028 t 3.7. CHARAKTERYSTYKA CZĘSTOTLIWOŚCIOWA ODCZYTU W układzie pomiarowym i przy napięc
CCF20080709�031 5.3. CHARAKTERYSTYKA CZĘSTOTLIWOŚCIOWA Charakterystyka częstotliwościowa „ZAPIS--ODC
więcej podobnych podstron