DSCF8498
66
ograniczone jest przede wszystkim stosunkowo dużym kosztem napędu oraz problemami wynikającymi z eksploatacji napędu hydraulicznego.
6.3. Zasada działania silnika skokowego wysokomomentowego
Silniki wysokomomentowe podzielić można na dwie grupy: z wirnikiem jednobiegunowym, z wirnikiem wielobiegunowym.
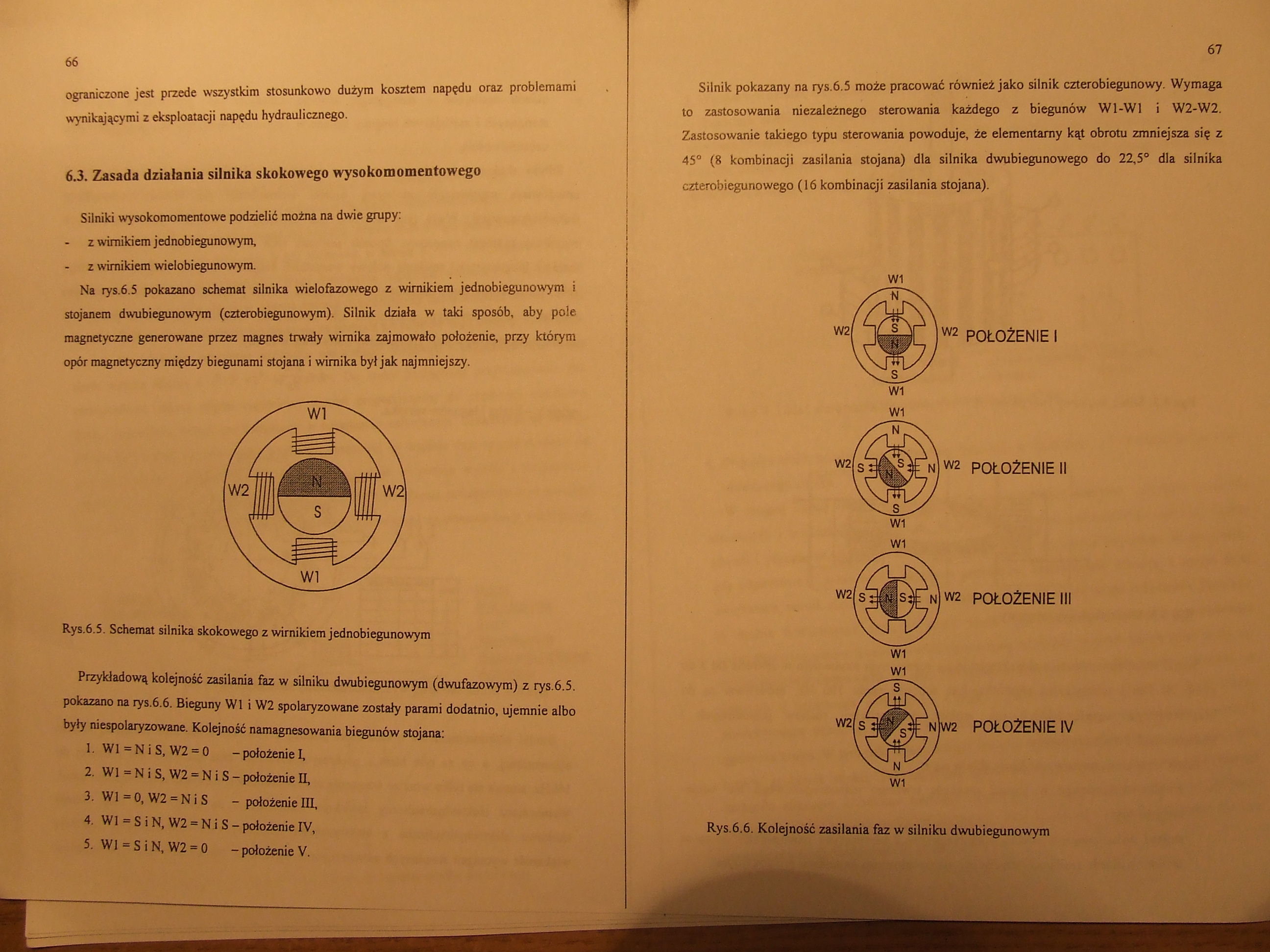
Na rys.6.5 pokazano schemat silnika wielofazowego z wirnikiem jednobiegunowym i stojanem dwubiegunowym (czterobiegunowym). Silnik działa w taki sposób, aby pole magnetyczne generowane przez magnes trwały wirnika zajmowało położenie, przy którym opór magnetyczny między biegunami stojana i wirnika był jak najmniejszy.
Rys.6.5. Schemat silnika skokowego z wirnikiem jednobiegunowym
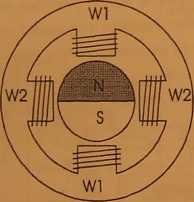
Przykładową kolejność zasilania faz w silniku dwubiegunowym (dwufazowym) z rys.6.5. pokazano na rys.6.6. Bieguny W1 i W2 spolaryzowane zostały parami dodatnio, ujemnie albo były niespolaryzowane. Kolejność namagnesowania biegunów stojana:
1. W1 =Ni S, W2 = 0 - położenie I,
2. W1 = N i S, W2 = N i S - położenie U,
3. W1 - 0, W2 = N i S - położenie HI,
4. W1 = S i N, W2 = N i S - położenie IV,
5. W1 = S i N, W2 = 0 - położenie V.
Silnik pokazany na rys.6.5 może pracować również jako silnik czterobiegunowy. Wymaga to zastosowania niezależnego sterowania każdego z biegunów Wl-Wl i W2-W2. Zastosowanie takiego typu sterowania powoduje, że elementarny kąt obrotu zmniejsza się z 45° (8 kombinacji zasilania stojana) dla silnika dwubiegunowego do 22,5° dla silnika czterobiegunowego (16 kombinacji zasilania stojana).
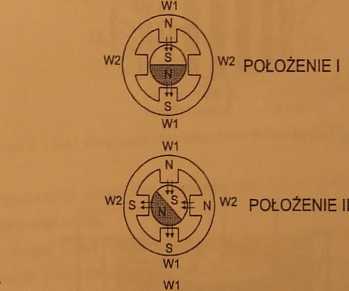
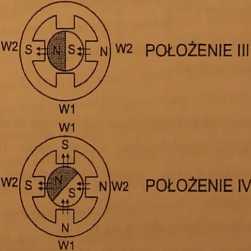
Rys.6.6. Kolejność zasilania faz w silniku dwubiegunowym
Wyszukiwarka
Podobne podstrony:
Wstęp Niniejszy skrypt przeznaczony jest przede wszystkim dla studentów kierunków ekonomicznych oraz
skanuj0008 PSYCHOANALIZA Jest przede wszystkim metodą i techniką leczenia zaburzeń psychicznych i em
§3 1. Założeniem praktyki asystenckiej dla studentów I roku jest przede wszystkim
PICT6390 Dokładność uzależniona jest przede wszystkim od znajomości tej rzeczywistości, wobec której
IMGB04 (4) 166 Winywi psiankowate 166 Winywi psiankowate Opadanie zawiązków. Powodowa^, jest przede
IMGs52 perkusyjne ~. Celem stosowania tych ostatnich jest przede wszystkim odwoływanie się do poczuc
skanowanie0083 (10) 568 TABULA RASA Wychowywanie dzieci jest przede wszystkim powinnością etyczną. N
Wprowadzenie Prezentowany zbiór zadań przeznaczony jest przede wszystkim dla studentów prawa i
ŚRODOWISKO ŻYCIA Okres rozrodu Sieweczka rzeczna spotykana jest przede wszystkim w umiarkowanej stre
piej byłoby zacząć działać. Działaniem jest przede wszystkim edukacja ekologiczna. Nie tylko szkolna
Funkcje korzeni: Pierwszą funkcją korzeni jest przede wszystkim przytwierdzenie do podłoża. Silnie
więcej podobnych podstron