HPIM0837
tk Naftędy robolów przfwiynhwych
- .silniki o wirniku biernym (rcłuktancyjnc) z momcnicm leluklaiicy;,
- Nilniki o wirniku czynnym (prawic wyłącznic maszyny magnci() p. irycznc), wykorzystujące moment synchroniczny wzbudzeń iowy,
■ silniki hybrydowe, wykorzystujące zarówno moment synchronjc jak i moment reluktancyjny.
Na rysunku 6.25 jest pokazana zasada działania trójfazowego silnią kowego rcluktancyjnego o sześciu biegunach na stojanic. Układ faz skła^ z uzwojeń sterowania fazy pierwszej (//, /;), fazy drugiej (2/, 2j) i fazy trj, *'?
(4# ^
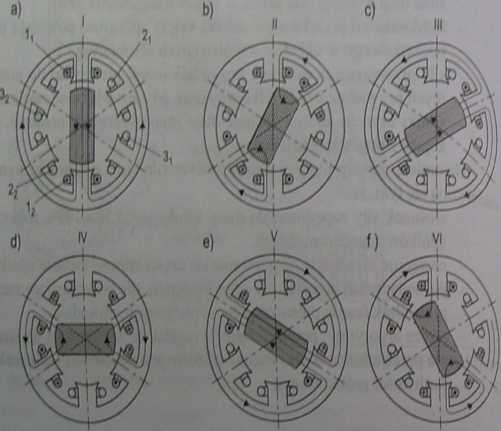
Zamula działania trójfazowego rcluktancyjnego silnika skokowego [1]
Rysunek 0.25
Kiedy prąd pojawi się w uzwojeniach M I| fazy pierwszej, wirnik zajmuj pozycją 1 (rys. 6.25a), w której wartość rcluktancji dla strumienia magnetyczl nego jest minimalna. Gdy w następnej chwili prąd występuje w uzwojeniach //] l; fazy pierwszej i jednocześnie w 2/, 2; fazy drugiej, wirnik zajmie położenie pośrednie U (rys. 6.25b). Następnie w paśmie fg fĄ nie ma już prądów i wirnik pod działaniem sil pola magnetycznego od prądów w uzwojeniach 2/, 2j zajmuje] położenie 111 (rys. 6.25c) itd. Następne zmiany prądów powodują kolejne zmiaj
Ig
silniki skokowe są wykonywane zwiększoną liczbą faz: ezterofazowe, pięciofazowe (i nawet z większą ilością faz), ponieważ ze wzrostem liczby faz maszyny elektrycznej zwiększają się
-cni obrotowy i liczba skoków na jeden obrót (to znaczy maleje wartoić znamionowego).
^ Struktura czterofazowego silnika skokowego jest pokazana na ry*. 6.26, J zawiera osiem biegunów wydatnych z ulokowanymi na każdym z nich 'Lina #bami oraz fe zębów na wirniku. Silnik ten może realizować prace peł-fokową z komutacją: I-2—3-4-1-... (komutacja cztcrotaktowa pojedyncza) j /, 2-2, 3-3, 4-4, 1—1, Z-... (komutacja cztcrotaktowa parowa #yme-tgi pólskokową: 1—1, 2-2-2, 3-3-3, 4-4-4, 1(komutacja oimio* parowa niesymetryczna) oraz inny rodzaj pracy z odpowiednio zmie* ^ącąsię kombinacją włączonych grup faz: /, 2-/, 2,5-2,5-2,5,4-5,4-5,4,
/"!>••• M
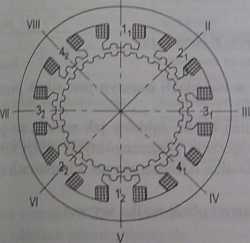
tytunek 6.26". / |
Struktura czterofazowego silnika skokowego rcluktancyjnego
Wartość skoku tego silnika reluktancyjnego w przypadku komutacji syntetycznej [n = 1) jest równa
(6.13)
J60°_ 360° 0
ff ZRm 30 • 4 a liczba skoków w jednym obrocie wirnika wynosi % = 360°/3° * 120.
W konstrukcji na nabiegunnikach stojana są wykonane zęby (o takie samej podzialce jak podziałka żłobkowa wirnika) w ten sposób, że pod przeciwległymi biegunami są ustawione naprzeciwko siebie zęby stojana i wirnika, a pozostałe bieguny są przesunięte o 1/4 podziałki żłobkowej do zębów wirnika. Zatem po* działka żłobkowa wirnika stanowi r* = 360°/30 * 12°. Przy komutacji niesymetrycznej ośmiolaktowej według algorytmu 1-1,2-2-2. J-J-J. 4-4-4, otrzymuje się skok odpowiadający 1/8 podziałki żłobkowej wirnika (Aok poić-
Wyszukiwarka
Podobne podstrony:
DSCN0481 (Large) 304 9. SILNIKI SKOKOWE 304 9. SILNIKI SKOKOWE odpowiada — ~ < <pr < dla si
instalacje066 1. WSTĘP 16 Rys. J.4. Schemat działania silnika skokowego o wirniku biernym: a), b), c
HPIM0871 8. Urządzenia chwytające robolów przemysłowych a wartość kąta fi— z układu równań acos(a —
HPIM0895 10. Złtlowwna robolów ptawy>lo»ydi RpuncklOJIfr _ Zidbotyzcmanc maszyn
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
silnik 1 wirnik źródło prądu
462 (8) 452 IZ Prądy i aMctmmagnetyczny moment obrotowy maszyny indukcyjnej 12.6.2. Silnik o wirniku
466 (8) - •« obliczanie silnika o wirniku dwuklątkowym 467 ep, brlh,t rhr 0,79, _ _ fcą_W
4.1.3 Ćwiczenia Ćwiczenie 1 Silnik z wirnikiem tarczowym ma następujące dane znamionowe: 24 V; 2,2 A
Rys. 11.2. Schemat przetwornicy spawalniczej: 1 - wał, 2 - łożyska, 3 - wirnik silnika, 4 - wirnik w
HPIM0830 6. Napędy robolów przemysłowych 6.4.1. Napędy prądu stałego z silnikami komutatorowymi Stos
HPIM0831 Rysunek 6, 13 _ Budowa wysokomomentowego komutatorowego silnika prądu stałego; / — wirnik,
Slajd09 (41) Modyfikacja struktury: WB = 0, brak więzów biernych, WL = 0, brak ruchliwości lokalnych
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
s02 (3) Pierwszy prototyp śmigłowca W-8 z jednym silnikiem turbinowym i czterolopatowym wirnikiem no
więcej podobnych podstron