HPIM0895
10. Złtlowwna robolów ptawy>lo»ydi
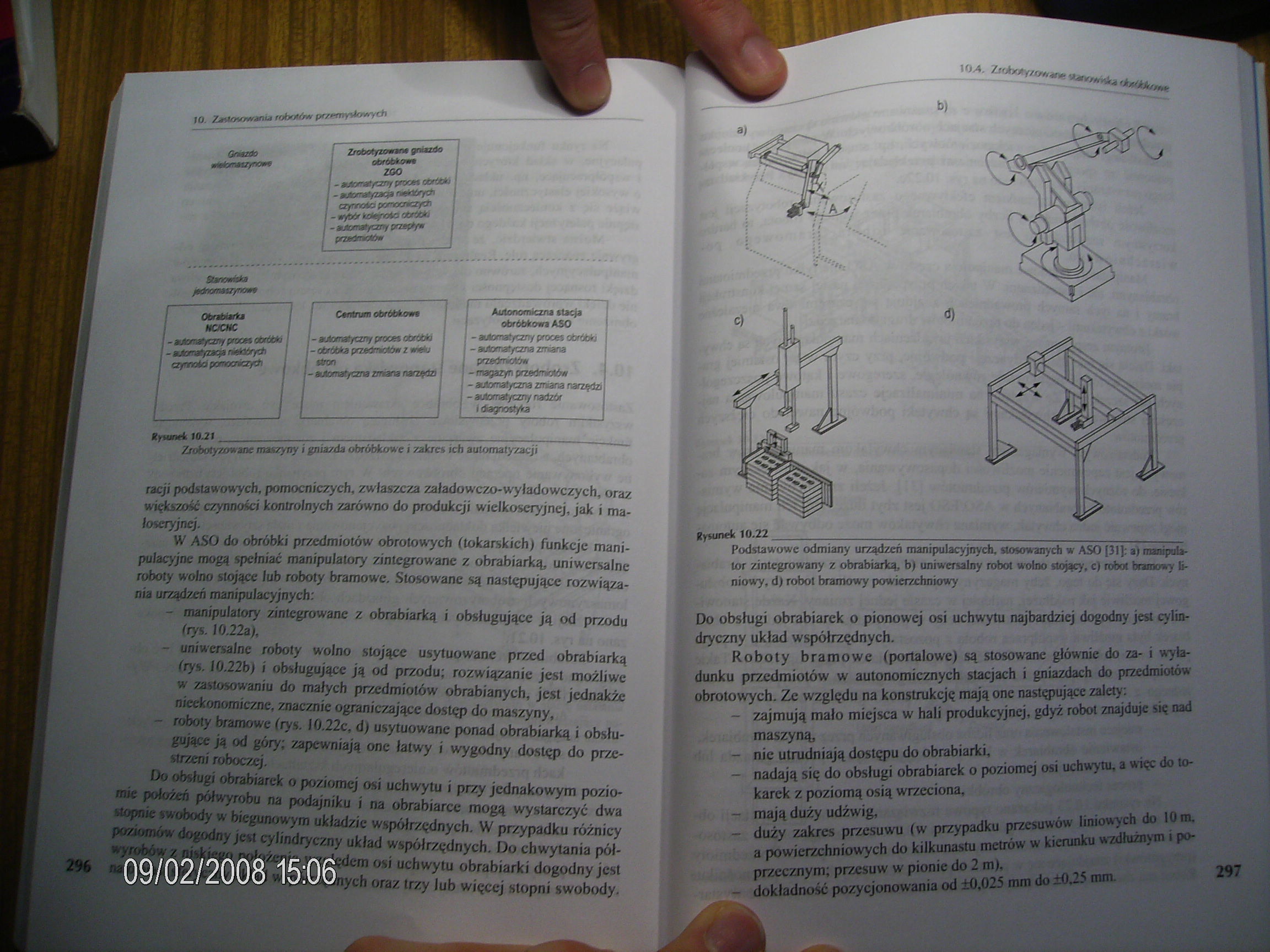
RpuncklOJIfr _
Zidbotyzcmanc maszyny i gniazda obróbkowe i zakres ich automatyzacji
racji podstawowych, pomocniczych, zwłaszcza załadowczo-wyładowczych, oraz większość czynności kontrolnych zarówno do produkcji wielkoseiyjncj, jak i ma-łosesyjnej.
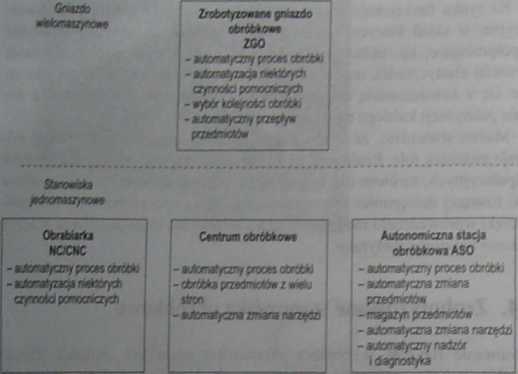
W ASO do obróbki przedmiotów obrotowych (tokarskich) funkcje manipulacyjne mogą spełniać manipulatory zintegrowane z obrabiarką, uniwersalne roboty wolno stojące lub roboty bramowe. Stosowane są następujące rozwiązania urządzeń manipulacyjnych:
- manipulatory zintegrowane z obrabiarką i obsługujące ją od przodu (rys. 10.22a),
- uniwersalne roboty wolno stojące usytuowane przed obrabiarką (rys. 10.22b) i obsługujące ją od przodu; rozwiązanie jest możliwe w zastosowaniu do małych przedmiotów obrabianych, jest jednakże nieekonomiczne, znacznie ograniczające dostęp do maszyny,
I roboty bramowe (rys. 10.22c, d) usytuowane ponad obrabiarką i obsługujące ją od góry; zapewniają one łatwy i wygodny dostęp do przestrzeni roboczej.
Do obsługi obrabiarek o poziomej osi uchwytu i przy jednakowym poziomie położeń półwyrobu na podajniku i na obrabiarce mogą wystarczyć dwa stopnie swobody w biegunowym układzie współrzędnych. W przypadku różnicy poziomów dogodny jest cylindryczny układ współrzędnych. Do chwytania pół-
uchwytu obrabiarki dogodny
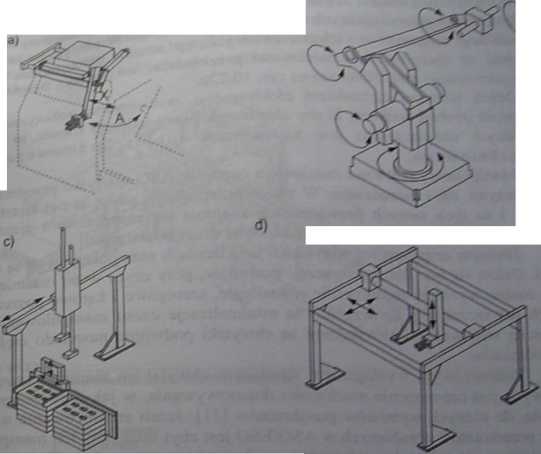
fywinefc 10.22 __
Podstawowe odmiany urządzeń manipulacyjnych, stosowanych w ASO [31]: a) manipulator zintegrowany z obrabiarką, b) uniwersalny robot wolno stojący, c) robot bramowy liniowy, d) robot bramowy powierzchniowy
Do obsługi obrabiarek o pionowej osi uchwytu najbardziej dogodny jest cylindryczny układ współrzędnych.
Roboty bramowe (portalowe) są stosowane głównie do za- i wyładunku przedmiotów w autonomicznych stacjach i gniazdach do przedmiotów obrotowych. Ze względu na konstrukcję mają one następujące zalety:
- zajmują mało miejsca w hali produkcyjnej, gdyż robot znajduje się nad maszyną,
- nie utrudniają dostępu do obrabiarki,
- nadają się do obsługi obrabiarek o poziomej osi uchwytu, a więc do tokarek z poziomą osią wrzeciona,
- mają duży udźwig,
- duży zakres przesuwu (w przypadku przesuwów liniowych do 10 m. a powierzchniowych do kilkunastu metrów w kierunku wzdłużnym i poprzecznym; przesuw w pionie do 2 m),
- dokładność pozycjonowania od ±0,025 mm do ±0,25 mm.
Wyszukiwarka
Podobne podstrony:
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
42068 Scan230002 I—f ^-(0O°C ) h iOO oUq. 4evi4> - $ 2Jcq^ 10 ^ ) ° IDO -io ^•j
5.1 co LO co cd 7.4 co O) cd 10.4 co CSJ CD ŁO i CN cd i l co LO LO cd CO O) O)
„MŁODZI GŁOSUJĄ" W II LO 19.10.2015 r. uczniowie z II LO wzięli udział w symulacji wyborów
HPIM0837 tk Naftędy robolów przfwiynhwych - .silniki o wirniku biernym (rcłuktancy
HPIM0871 8. Urządzenia chwytające robolów przemysłowych a wartość kąta fi— z układu równań acos(a —
HPIM0884 10 (obolów iirzwiiydiiwych wykwntlucc opanuj pfooMU technologicznego (obr
HPIM0890 10 7jwvm*fM uMrn pr/Mrrr*r*yfh 10 7jwvm*fM uMrn pr/Mrrr*r*yfh m óm ekki/arftftry, 4 - folki
HPIM0891 10. Zastosowania robotów przemysłowych Rysunek -—----— Analiza
HPIM0893 10. ZmoMMMflu robotów pnrmysbwyth itopiony i wydmuchany za pomocą gazów poprzez szczelinę D
HPIM0897 ■ 10. Zaścósovvahia robotów przemysłowych Rysunek
HPIM0898 10. Zastosowania robotów przemysłowych 10. Zastosowania robotów przemysłowych 5 Rysunek
HPIM0900 10. Zastosowania robolów przemysłowych wane stanowisko, autonomiczną stację lub linię monta
więcej podobnych podstron