DSCN0481 (Large)
304 9. SILNIKI SKOKOWE
304 9. SILNIKI SKOKOWE
odpowiada — ~ < <pr < dla silnika o wirniku biernym lub — ~

dla silnika o wirniku czynnym. W tej strefie siły elektromagnetyczne działające na wirnik starają się obrócić go w kierunku, w którym energia wzrasta, czyli w położeniu ząb - ząb lub N - S. Jeżeli bezwzględne odchylenie wirnika przekroczy półokres momentu |ę>J > n, to po zaniknięciu sity wymuszającej wirnik nic powróci do położenia wyjściowego <p* = 0. lecz do punktu odpowiadającego bliższemu maksimum energii, czyli do punktu \<p0\ ■ 2n. Jeżeli wirnik zajmuje położenie \tp0\ = iz, czyli gdy znajduje się w zerze niestabilnym, to jego powrót do wyjściowego położenia równowagi jest równie prawdopodobny co jego przejście do innego sąsiedniego punktu równowagi stabilnej. Dlutego punkty te wyłącza się ze strefy stabilności.
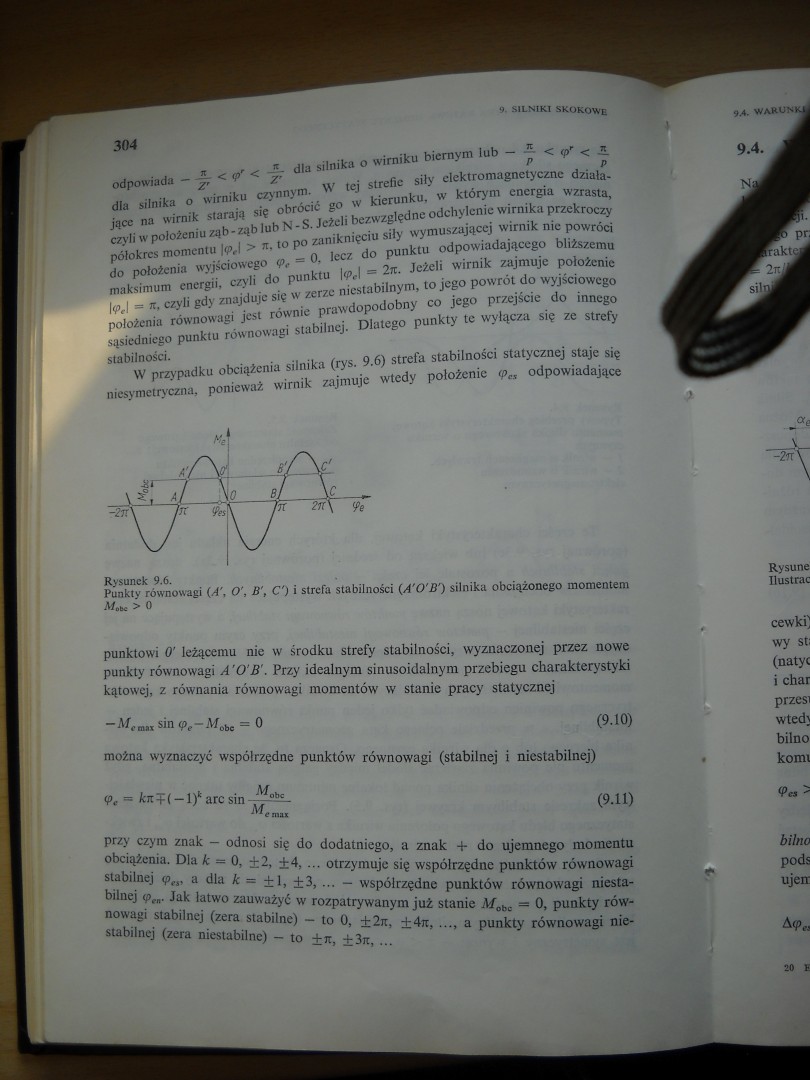
W przypadku obciążenia silnika (rys. 9.6) strefa stabilności statycznej staje się niesymetryczna, ponieważ wirnik zajmuje wtedy położenie odpowiadające
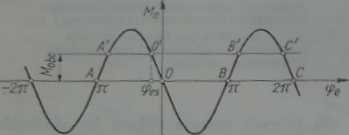
Rysunek 9.6.
Punkty równowagi (A\ 0\ B\ C') i strefa stabilności (4'O'BO silniku obciążonego momentem
A*.*. > O
punktowi 0’ leżącemu nic w środku strefy stabilności, wyznaczonej przez nowe punkty równowagi A ’0'Bf. Przy idealnym sinusoidalnym przebiegu charakterystyki kątowej, z równania równowagi momentów w stanie pracy statycznej
(9.10)
—sin <pr-Mobe = 0
można wyznaczyć współrzędne punktów równowagi (stabilnej i niestabilnej)
(9.11)
<p. — kx^(—1)* arc sin -
*•* 0 mu
przy czym znak — odnosi się do dodatniego, a znak + do ujemnego momentu obciążenia. Dla k = 0, ±2, ±4, ... otrzymuje się współrzędne punktów równowagi stabilnej a dla k = ±1, ±3, ... — współrzędne punktów równowagi niestabilnej Jak łatwo zauważyć w rozpatrywanym już stanie Adfobo - 0, punkty równowagi stabilnej (zera stabilne) — to 0, ±2jc, ±4a, .... a punkty równowagi niestabilnej (zera niestabilne) — to ±s, ±3k, ...
Wyszukiwarka
Podobne podstrony:
DSCN0474 (Large) 298 9. SILNIKI SKOKOWI komutacji. Tworzą one rK7 komutacji. Cyklowi odpowiada taka
DSCN0477 (Large) 300 9. SILNIKI SKOKOWE 9.3. Charakterystyka kątowa momentu statycznego Moment elekt
DSCN0479 (Large) 302 9. SILNIKI SKOKOWI Na rysunku 9.3 przedstawiono schematycznie sens fizyczny dot
DSCN0485 (Large) 308 9. SILNIKI SKOKOWE silnika wynika, te uzwojenie silnika symetrycznego magnetycz
DSCN0487 (Large) 310 9. SILNIKI SKOKOW8 symetryczna wg cyklogramu (1, 2, 3), (2. 3.4), (3.4, 1), (4,
DSCN0489 (Large) 312 9. SILNIKI SKOKOWE Rysunek 9.11. Komutacja niesymetryczna 16- i 12-taktowa siln
DSCN0491 (Large) 314 9. SILNIKI SKOKOWI statyczne i cztery bramki dynamiczne, lub osiem bramek i trz
DSCN0493 (Large) 316 9. SILNIKI SKOKOWI* — zapewnienie w sianie bezprądowym ustalo
DSCN0495 (Large) 318 9. SILNIKI SKOKOWA (załączenie napięcia) i 1/8 podziałki na taki jałowy (wyłącz
DSCN0439 (Large) 50 4. Silniki bezszczotkowe z wirującym inagimm Silniki bezszczotkowe z wirującym m
DSCN0450 (Large) 5.3.Sterowanie silników krokowych Sterowanie pracą silników krokowych jest zadaniem
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0499 (Large) 322 9. SILNIKI SKOKOM W porównaniu z silnikiem czteropasmowym symetrycznym redukcja
HPIM0837 tk Naftędy robolów przfwiynhwych - .silniki o wirniku biernym (rcłuktancy
DSCN0473 (Large) Silniki skokowe9.1. Wstęp Silnik skokowy, zwany również krokowym0, jest elektromech
DSCN0492 (Large) ».«. KONSTRUKCJE 315 ».«. KONSTRUKCJE 315 Silniki jednopasmowe Klasyfikację silnikó
DSCN0494 (Large) 9.6, KONSTRUKCIE 317 poprzednio. Na rysunku 9.16a pokazano rozwiązanie konstrukcyjn
DSCN0497 (Large) *V»] 320 SILNIKI SKOKOWI 0 wirniku czynnym 1 —
DSCN0498 (Large) p.6. KONSTRUKCJE 321 Rysunek 9.21. Przekroje poprzeczne magnetowodów silników skoko
więcej podobnych podstron