DSCN0495 (Large)
318 9. SILNIKI SKOKOWA
(załączenie napięcia) i 1/8 podziałki na taki jałowy (wyłączenie napięcia). Każdemu impulsowi sterującemu odpowiada więc skok równy 1/4 podziałki zębowej. W omawianym przypadku przy liczbie zębów wirnika Zr ■ 20 - skok wirnika na jeden impuls roboczy wynosi 4°30' (dwa skoki po 2° 15').
Silniki tego typu, np. firmy Sigma, stosowane są masowo w czytnikach maszyn matematycznych, w mechanizmach napędu taśm, itp. Noszą one czasem nazwę silników harmonicznych.
Silniki skokowe wielopasmowe
Silniki skokowe wielopasmowe są wykonywane w dwu zasadniczych odmianach; o wirnikach czynnych — najczęściej typu magnetoelektrycznego i o wirnikach bie nych — typu reluktancyjnego.
Silniki skokowe magnetoelektryczne są uzwajane najczęściej dwupasmowo (przy komutacji przemiennobiegunowej), trójpasmowo i czteropasmowo, przy czym w dwu ostatnich przypadkach stosuje się najczęściej komutację stałobiegunową. Pod względem konstrukcyjnym niczym właściwie nie różnią się od silników synchronicznych małej mocy o uzwojonych stojanach i wirnikach o magnesach trwałych. Skok zależy od liczby par biegunów, patrz wzory (9.12) i (9.25), a więc od sposobu rozwiązania wirnika. Wykonuje się wirniki:
— o biegunach wydatnych (typu gwiazda lita lub gwiazda złożona z magnesów dwubiegunowych anizotropowych o strukturze kolumnowej) przeznaczone do silników o małej liczbie skoków na obrót;
— o magnesach cylindrycznych magnesowanych wiclobiegunowo w kierunku promieniowym, zwykle ferrytowych (patrz rys. 9.16a),
— o magnesach walcowych magnesowanych osiowo i nabiegunnikach typu pazurowego (rys. 9.16b); konstrukcja ta pozwala łatwo uzyskać dużą liczbę par biegunów na obwodzie.
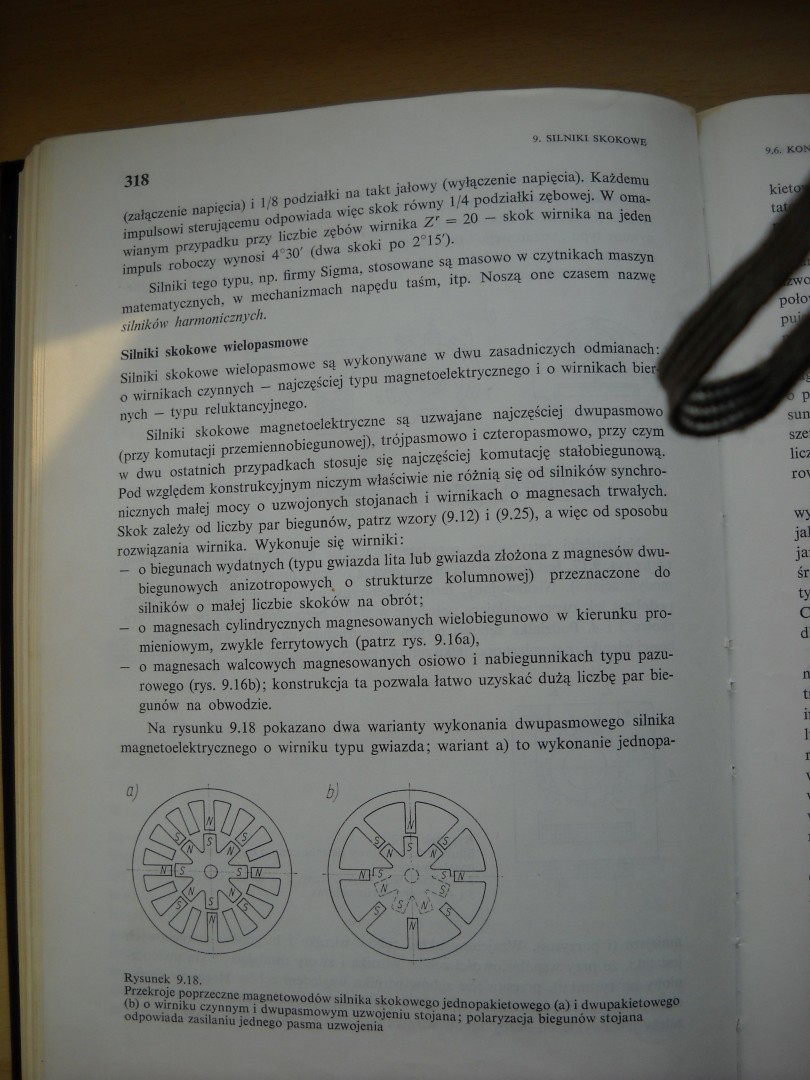
Na rysunku 9.18 pokazano dwa warianty wykonania dwupasmowego silnika magnetoelektrycznego o wirniku typu gwiazda; wariant a) to wykonanie jednopa-
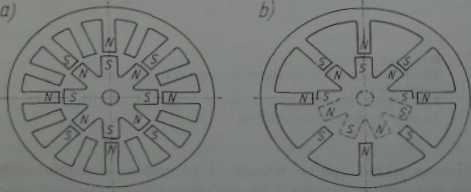
Rysunck 9.18.
Przekroje poprzeczne magnetowodów silnika skokowego jednopakictowego (a) i dwupakietowego (b) o wirniku czynnym i dwupasmowym uzwojeniu stojana; polaryzacja biegunów stojana odpowiada zasilaniu jednego pasma uzwojenia
Wyszukiwarka
Podobne podstrony:
DSCN0474 (Large) 298 9. SILNIKI SKOKOWI komutacji. Tworzą one rK7 komutacji. Cyklowi odpowiada taka
DSCN0477 (Large) 300 9. SILNIKI SKOKOWE 9.3. Charakterystyka kątowa momentu statycznego Moment elekt
DSCN0479 (Large) 302 9. SILNIKI SKOKOWI Na rysunku 9.3 przedstawiono schematycznie sens fizyczny dot
DSCN0481 (Large) 304 9. SILNIKI SKOKOWE 304 9. SILNIKI SKOKOWE odpowiada — ~ < <pr < dla si
DSCN0485 (Large) 308 9. SILNIKI SKOKOWE silnika wynika, te uzwojenie silnika symetrycznego magnetycz
DSCN0487 (Large) 310 9. SILNIKI SKOKOW8 symetryczna wg cyklogramu (1, 2, 3), (2. 3.4), (3.4, 1), (4,
DSCN0489 (Large) 312 9. SILNIKI SKOKOWE Rysunek 9.11. Komutacja niesymetryczna 16- i 12-taktowa siln
DSCN0491 (Large) 314 9. SILNIKI SKOKOWI statyczne i cztery bramki dynamiczne, lub osiem bramek i trz
DSCN0493 (Large) 316 9. SILNIKI SKOKOWI* — zapewnienie w sianie bezprądowym ustalo
DSCN0439 (Large) 50 4. Silniki bezszczotkowe z wirującym inagimm Silniki bezszczotkowe z wirującym m
DSCN0450 (Large) 5.3.Sterowanie silników krokowych Sterowanie pracą silników krokowych jest zadaniem
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0499 (Large) 322 9. SILNIKI SKOKOM W porównaniu z silnikiem czteropasmowym symetrycznym redukcja
instalacje163 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 206 naprowadzanie ich na pożądany cel. Na przykład
DSCN0465 (Large) 52 2. ELEMENTY TEORII MASZYNY UOGÓLNIONEJ Przechodząc na wartości skutecamc: {/«■ •
DSCN0447 (Large) fi. 2. PotUiat konstrukcyjny silników krokowych - Napięcie pracy
DSCN0473 (Large) Silniki skokowe9.1. Wstęp Silnik skokowy, zwany również krokowym0, jest elektromech
DSCN0492 (Large) ».«. KONSTRUKCJE 315 ».«. KONSTRUKCJE 315 Silniki jednopasmowe Klasyfikację silnikó
więcej podobnych podstron