DSCN0450 (Large)
5.3.
Sterowanie silników krokowych
Sterowanie pracą silników krokowych jest zadaniem na tyle złożonym Jl firm półprzewodnikowych wdrożyło do produkcji zarówno końcówki nych konfiguracjach, jak i kompletne sterowniki z programowalnymi sst mi. Ich dobór do wymagań konkretnej aplikacji i możliwości zastosowj^Zw silnika mają istotny wpływ na jakość pracy napędu.
5.3.1.
Sterowanie talowe
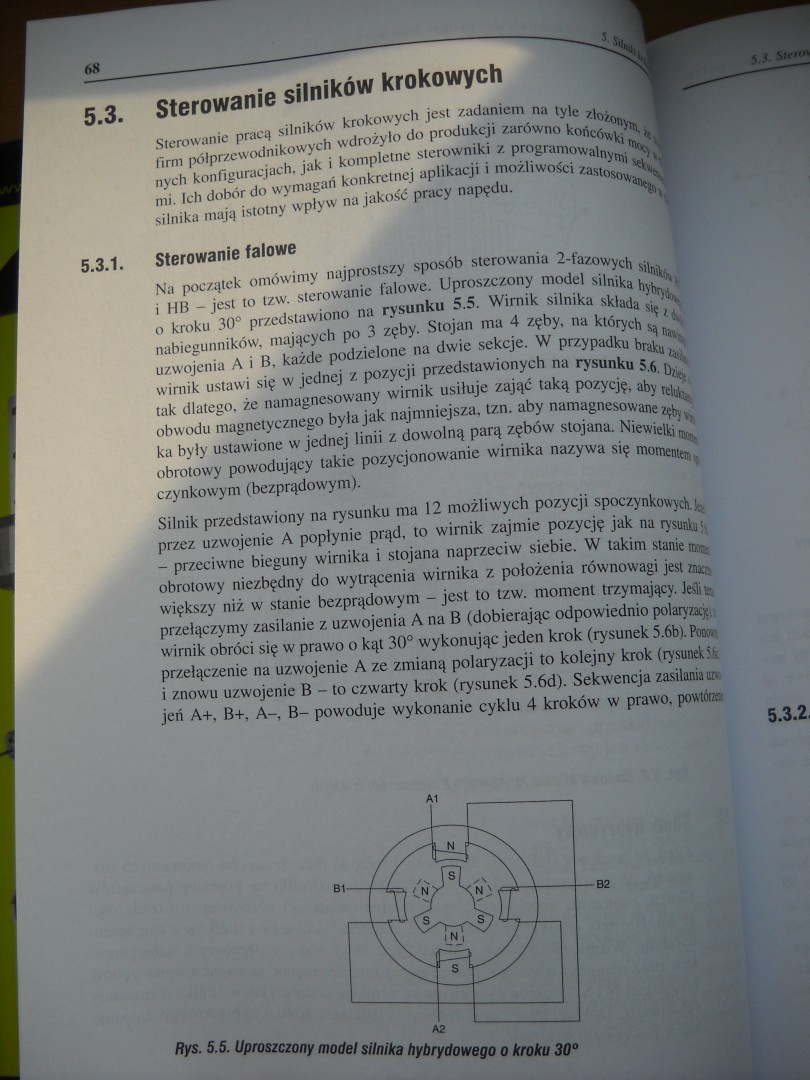
Na początek omówimy najprostszy sposób sterowania 2-fazowych śilifH i HB - jest to tzw. sterowanie falowe. Uproszczony model silnika hybiy^/ o kroku 30° przedstawiono na rysunku 5.5. Wimik silnika składa się,,
nabiegunników, mających po 3 zęby. Stojan ma 4 zęby, na których są uzwojenia A i B, każde podzielone na dwie sekcje. W przypadku braku ^ wirnik ustawi się w jednej z pozycji przedstawionych na rysunku 5.6. Dj^J tak dlatego, że namagnesowany wimik usiłuje zająć taką pozycję, aby ttł^ obwodu magnetycznego była jak najmniejsza, tzn. aby namagnesowane zęby,, ka były ustawione w jednej linii z dowolną parą zębów stojana. Niewielki ffl obrotowy powodujący takie pozycjonowanie wirnika nazywa się momenimtą czynkowym (bezprądowym).
Silnik przedstawiony na rysunku ma 12 możliwych pozycji spoczynkowych. przez uzwojenie A popłynie prąd, to wimik zajmie pozycję jak na rysunki;.
| przeciwne bieguny wirnika i stojana naprzeciw siebie. W takim stanie ant obrotowy niezbędny do wytrącenia wirnika z położenia równowagi jest mat większy niż w stanie bezprądowym - jest to tzw. moment trzymający. Jeślim przełączymy zasilanie z uzwojenia A na B (dobierając odpowiednio polaryzację., wimik obróci się w prawo o kąt 30° wykonując jeden krok (rysunek 5.6b). Powi przełączenie na uzwojenie A ze zmianą polaryzacji to kolejny krok (rysunek 5k i znowu uzwojenie B - to czwarty krok (rysunek 5.6d). Sekwencja zasilania im jeń A+, B+, A-, B- powoduje wykonanie cyklu 4 kroków w prawo, powtórna
Al

Rys. 5.5. Uproszczony model silnika hybrydowego o kroku 30“
Wyszukiwarka
Podobne podstrony:
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0439 (Large) 50 4. Silniki bezszczotkowe z wirującym inagimm Silniki bezszczotkowe z wirującym m
DSCN0474 (Large) 298 9. SILNIKI SKOKOWI komutacji. Tworzą one rK7 komutacji. Cyklowi odpowiada taka
DSCN0477 (Large) 300 9. SILNIKI SKOKOWE 9.3. Charakterystyka kątowa momentu statycznego Moment elekt
DSCN0479 (Large) 302 9. SILNIKI SKOKOWI Na rysunku 9.3 przedstawiono schematycznie sens fizyczny dot
DSCN0481 (Large) 304 9. SILNIKI SKOKOWE 304 9. SILNIKI SKOKOWE odpowiada — ~ < <pr < dla si
DSCN0485 (Large) 308 9. SILNIKI SKOKOWE silnika wynika, te uzwojenie silnika symetrycznego magnetycz
DSCN0487 (Large) 310 9. SILNIKI SKOKOW8 symetryczna wg cyklogramu (1, 2, 3), (2. 3.4), (3.4, 1), (4,
DSCN0489 (Large) 312 9. SILNIKI SKOKOWE Rysunek 9.11. Komutacja niesymetryczna 16- i 12-taktowa siln
DSCN0491 (Large) 314 9. SILNIKI SKOKOWI statyczne i cztery bramki dynamiczne, lub osiem bramek i trz
DSCN0493 (Large) 316 9. SILNIKI SKOKOWI* — zapewnienie w sianie bezprądowym ustalo
DSCN0495 (Large) 318 9. SILNIKI SKOKOWA (załączenie napięcia) i 1/8 podziałki na taki jałowy (wyłącz
DSCN0499 (Large) 322 9. SILNIKI SKOKOM W porównaniu z silnikiem czteropasmowym symetrycznym redukcja
DSCN0520 (Large) 278 8. SILNIKI WYKONAWCZE Maksymalna moc na walc wystąpi przy prędkości względnej v
DSCN0521 (Large) 288 8. SILNIKI W Y KONAWGH i wynosi (8.295) Na rysunku 8.78 pokazano przebiegi mocy
028 3 28 Sterowanie logiczne i sekwencyjne urządzeń jest przedstawiony na rys. 3.5. Na rys. 3.6 zost
więcej podobnych podstron