DSCN0474 (Large)
298 9. SILNIKI SKOKOWI
komutacji. Tworzą one rK7 komutacji. Cyklowi odpowiada taka liczba taktów komutacji (skoków wirnika), dla której wektor pola w szczelinie maszyny obróci się o 360° cl. Silnik skokowy wraz z komutatorem można więc rozpatrywać tak, jak układ częstotliwościowej regulacji prędkości obrotowej silnika synchronicznego z możliwością ustalania położenia wirnika po każdym skoku elementarnym bądź po ich serii.
Pod względem budowy silniki skokowe są podobne do silników synchronicznych. Na stojanic mogą mieć bieguny wydatne lub utajone. Wirnik może by nany jako czynny (z magnesami trwałymi lub z cewką zasilaną prądem stały jako bierny - typu reluktancyjnego. Często wirniki typu rcluktancyj rają dodatkowo magnesy trwałe tworząc tzw. konstrukcje hybrydo;
9.2. Zasada działania
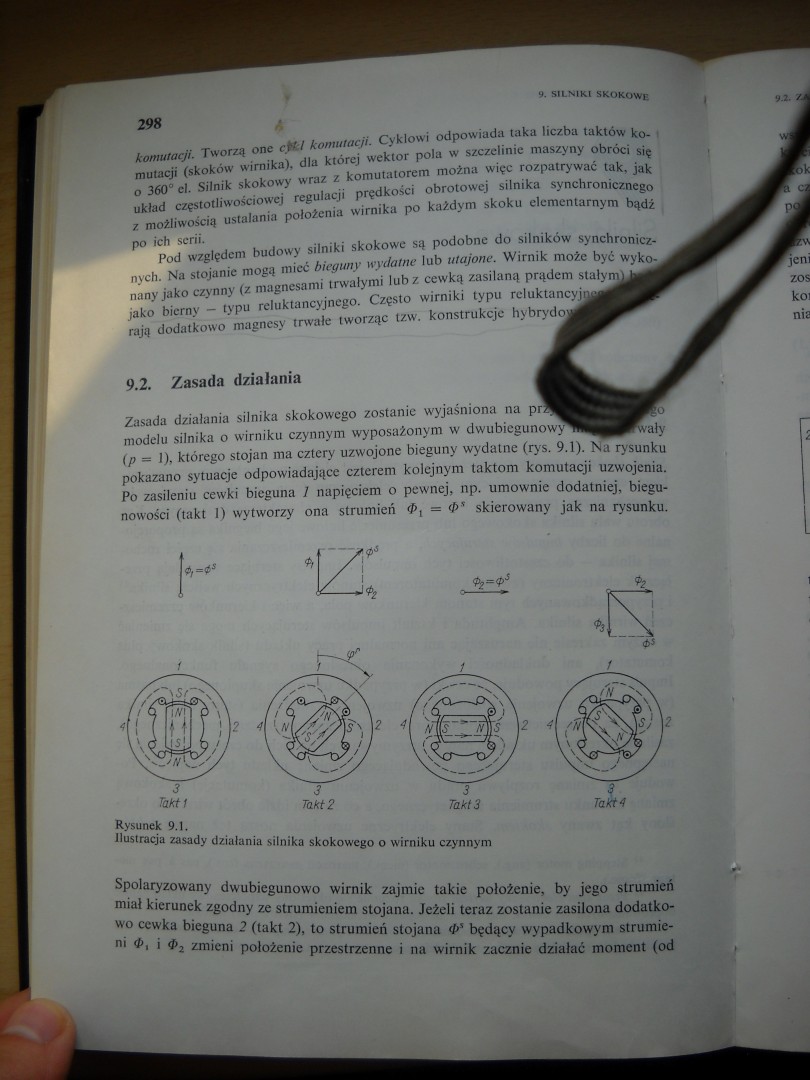
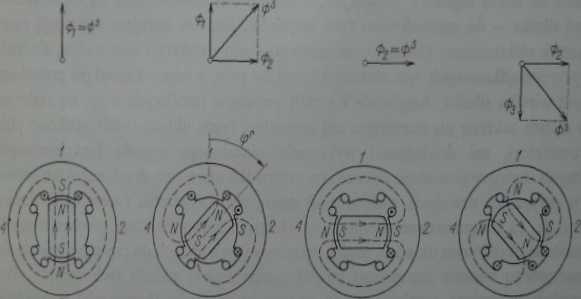
Zasada działania silnika skokowego zostanie wyjaśniona na p modelu silnika o wirniku czynnym wyposażonym w dwubicgunowymil^foaly (p = I), którego stojan ma cztery uzwojone bieguny wydatne (rys. 9.1). Na rysunku pokazano sytuacje odpowiadające czterem kolejnym taktom komutacji uzwojenia. Po zasileniu cewki bieguna 1 napięciem o pewnej, np. umownie dodatniej, biegunowości (takt 1) wytworzy ona strumień = <t>* skierowany jak na rysunku.
Rysunek 9.1.
Ilustracja zasady działania silnika skokowego o wirniku czynnym
3
Taktl
3
Takt 2
3
Takt 3
Tałttl
i
Spolaryzowany dwubiegunowo wirnik zajmie takie położenie, by jego strumień miał kieruoek zgodny ze strumieniem stojana. Jeżeli teraz zostanie zasilona dodatkowo cewka bieguna 2 (takt 2), to strumień stojana <Pł będący wypadkowym strumieni 4>, i 4>2 zmieni położenie przestrzenne i na wirnik zacznie działać moment (od
Wyszukiwarka
Podobne podstrony:
DSCN0487 (Large) 310 9. SILNIKI SKOKOW8 symetryczna wg cyklogramu (1, 2, 3), (2. 3.4), (3.4, 1), (4,
DSCN0489 (Large) 312 9. SILNIKI SKOKOWE Rysunek 9.11. Komutacja niesymetryczna 16- i 12-taktowa siln
DSCN0477 (Large) 300 9. SILNIKI SKOKOWE 9.3. Charakterystyka kątowa momentu statycznego Moment elekt
DSCN0479 (Large) 302 9. SILNIKI SKOKOWI Na rysunku 9.3 przedstawiono schematycznie sens fizyczny dot
DSCN0481 (Large) 304 9. SILNIKI SKOKOWE 304 9. SILNIKI SKOKOWE odpowiada — ~ < <pr < dla si
DSCN0485 (Large) 308 9. SILNIKI SKOKOWE silnika wynika, te uzwojenie silnika symetrycznego magnetycz
DSCN0491 (Large) 314 9. SILNIKI SKOKOWI statyczne i cztery bramki dynamiczne, lub osiem bramek i trz
DSCN0493 (Large) 316 9. SILNIKI SKOKOWI* — zapewnienie w sianie bezprądowym ustalo
DSCN0495 (Large) 318 9. SILNIKI SKOKOWA (załączenie napięcia) i 1/8 podziałki na taki jałowy (wyłącz
instalacje093 3. Sterowanie silników skokowych3.1. Komutacja symetryczna i niesymetryczna silnika sk
DSCN0439 (Large) 50 4. Silniki bezszczotkowe z wirującym inagimm Silniki bezszczotkowe z wirującym m
DSCN0450 (Large) 5.3.Sterowanie silników krokowych Sterowanie pracą silników krokowych jest zadaniem
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0499 (Large) 322 9. SILNIKI SKOKOM W porównaniu z silnikiem czteropasmowym symetrycznym redukcja
DSCN0473 (Large) Silniki skokowe9.1. Wstęp Silnik skokowy, zwany również krokowym0, jest elektromech
DSCN0488 (Large) 9,y SPOSOOY KOMUTACJI 311 Wartość skoku silnika w mierze kątów geometrycznych można
DSCN0492 (Large) ».«. KONSTRUKCJE 315 ».«. KONSTRUKCJE 315 Silniki jednopasmowe Klasyfikację silnikó
więcej podobnych podstron