DSCN0497 (Large)
*V»]
320
SILNIKI SKOKOWI
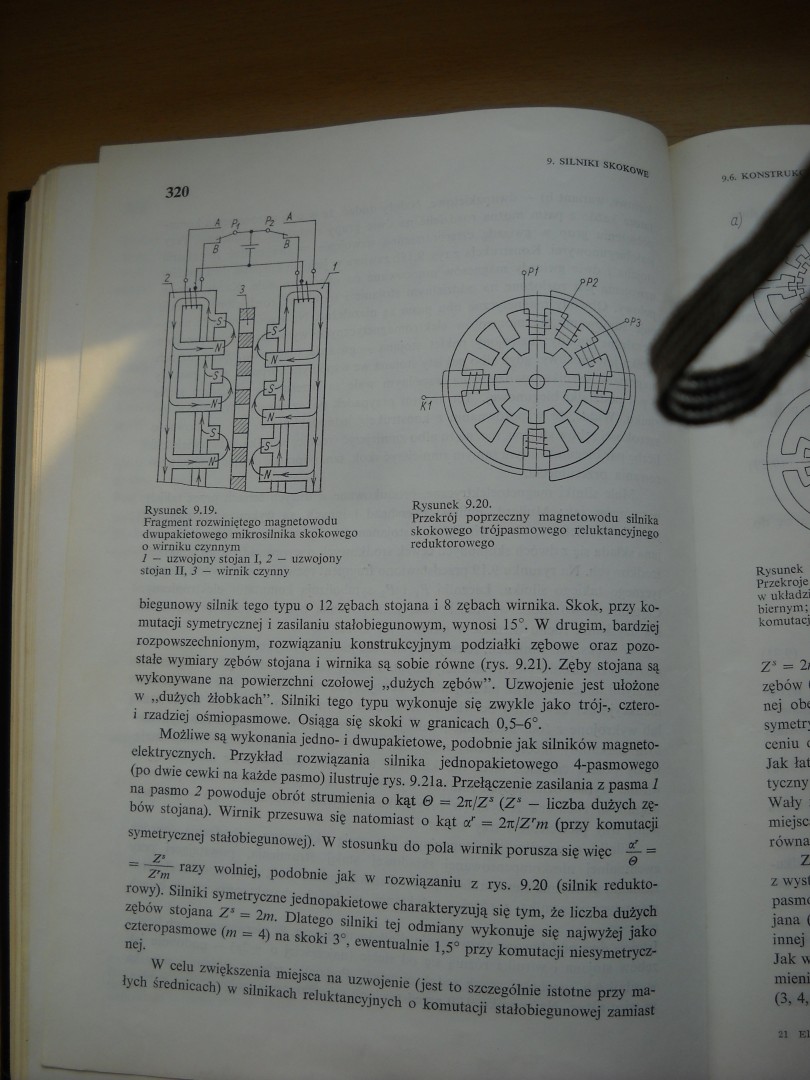
0 wirniku czynnym
1 — uzwojony stojan I, 2 — uzwojony stojan II. 3 — wirnik czynny
P2
Ki
<*)
Bfa
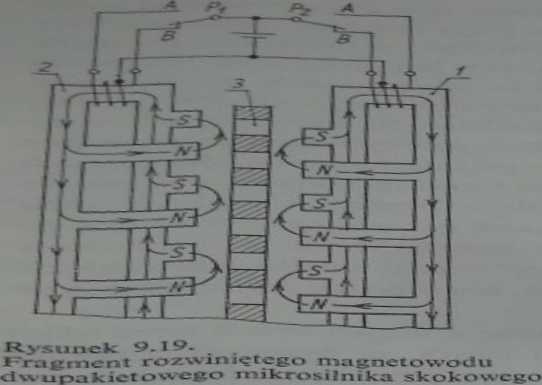
Rysunek 9.20.
Przekrój poprzeczny magnetowodu silnika skokowego trójpasmowego rcluktancyjnego reduktorowego
biegunowy silnik tego typu o 12 zębach stojana i 8 zębach wirnika. Skok, przy komutacji symetrycznej i zasilaniu stałobiegunowym, wynosi 15°. W drugim, bardziej rozpowszechnionym, rozwiązaniu konstrukcyjnym podziałki zębowe oraz pozostało wymiary zębów stojana i wirnika s^ sobie równo (rys. 9.21). Zęby stojana są wykonywane na powierzchni czołowej „dużych zębów*’. Uzwojenie jest ułożone w „dużych żłobkach”. Silniki tego typu wykonuje się zwykle jak:o trój-, cztero-a rzadziej ośmiopasmowe. Osiąga się skoki w granicach 0,5—6°.
Możliwe są wykonania jedno- i dwupakietowe, podobnie jak silników magneto-clektrycznych. Przykład rozwiązania silnika jednopakietowego 4-pasmowego (po dwie cewki na każde pasmo) ilustruje rys. 9.21 a. Przełączenie zasilania z pasma i na pasmo 2 powoduje obrót strumienia o kąt & = 2n/Z* <9 — liczba dużych zę-bów stojana). Wirnik przesuwa się natomiast o k%t otT =» 2it/Zrm (przy komutacji
symetrycznej stałobi egu nowej). W stosunku do pola wirnik porusza się więc —*
— _ razy wolniej, podobnie jak w rozwiązaniu z rys. 9.20 (silnik redukto-
_
rowy). Silniki symetryczne jednopakietowe charakteryzują się tym, że liczba dużych zębów stojana *» 2m. Dlatego silniki tej odmiany wykonuje się najwyżej jako
cztcropasmowe im = 4) na skoki 3°, ewentualnie 1,5° przy komutacji niesymetrycznej. _ _
W celu zwiększenia miejsca na uzwojenie (jest to szczególnie istotne przy małych średnicach) w silnikach reluktancyjnych o komutacji stal obi egu nowej zamiast
Wyszukiwarka
Podobne podstrony:
instalacje066 1. WSTĘP 16 Rys. J.4. Schemat działania silnika skokowego o wirniku biernym: a), b), c
instalacje071 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26 Zasada działania silnika skokowego
(-.*) Rys. 12. Silnik krokowy z wirnikiem czynnym: a)schemat budowy, b) kierunki strumienia magnetyc
DSCN0442 (Large) 4,1. Wlaicnmfci I zastosowanie silników BLDC 53 momentu obrotowego, lecz nadal nie
DSCN0444 (Large) 4. /. Właściwości i zastosowanie silników BLDC 55 Tab. 4.1. Sekwencje sterowania si
DSCN0448 (Large) Rys. 5.2. Przekrój silnika o zmiennej reluktancji Silnik o zmiennej reluktancji (VR
DSCN0481 (Large) 304 9. SILNIKI SKOKOWE 304 9. SILNIKI SKOKOWE odpowiada — ~ < <pr < dla si
DSCN0441 (Large) 4. 4. Silniki brzszcznlkowr z Rys. 4Z Przekrój silnika z uzwojeniami podzielonymi n
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0452 (Large)
DSCN0473 (Large) Silniki skokowe9.1. Wstęp Silnik skokowy, zwany również krokowym0, jest elektromech
DSCN0474 (Large) 298 9. SILNIKI SKOKOWI komutacji. Tworzą one rK7 komutacji. Cyklowi odpowiada taka
DSCN0477 (Large) 300 9. SILNIKI SKOKOWE 9.3. Charakterystyka kątowa momentu statycznego Moment elekt
DSCN0479 (Large) 302 9. SILNIKI SKOKOWI Na rysunku 9.3 przedstawiono schematycznie sens fizyczny dot
DSCN0485 (Large) 308 9. SILNIKI SKOKOWE silnika wynika, te uzwojenie silnika symetrycznego magnetycz
więcej podobnych podstron