HWScan00190
gdzie
x
jednostkowy powierzchniowy opór ścinania, kG/cm2, przyjmujemy wstępnie w mechanizmach jazdy
t = C *+- an tg o 2 C C — spójność podłoża, kG/cm2.
a/
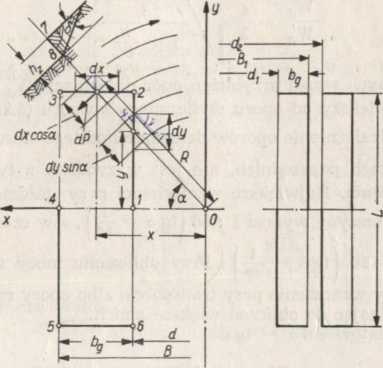
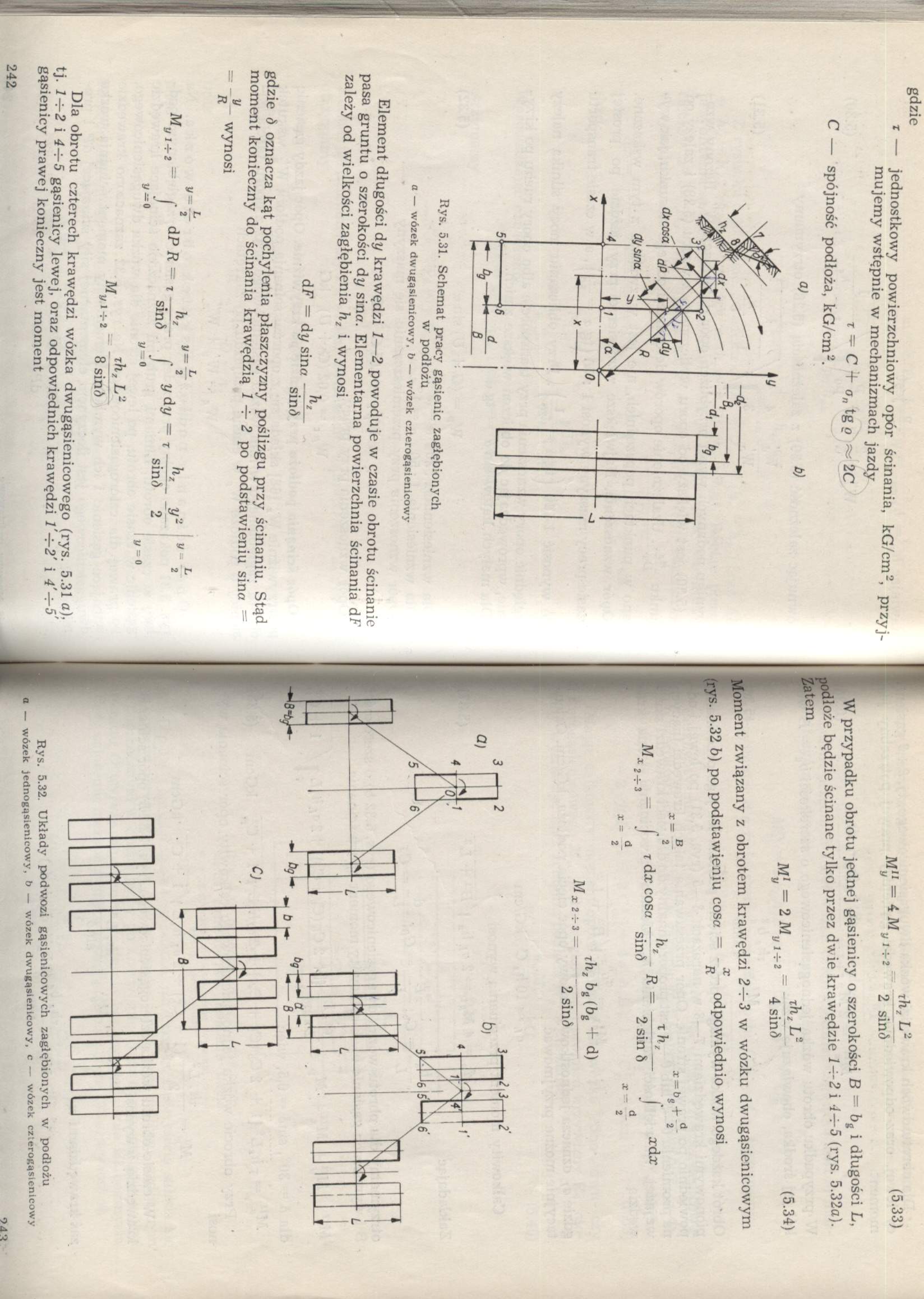
Rys. 5.31. Schemat pracy gąsienic zagłębionych w podłożu
a — wózek dwugąsienicowy, b — wózek czterogąsienicowy
Element długości dy krawędzi 1—2 powoduje w czasie obrotu ścinanie pasa gruntu o szerokości dy sina. Elementarna powierzchnia ścinania dF zależy od wielkości zagłębienia hz i wynosi
dF = dy sina -
* smd
gdzie ó oznacza kąt pochylenia płaszczyzny poślizgu przy ścinaniu. Stąd moment konieczny do ścinania krawędzią 1 H- 2 po podstawieniu sina -
= wynosi
v 2
I dP R —
v—o
sinó
sind
y n

o

y = 0
My 1 + 2
T KL'1 8 sin<^
Dla obrotu czterech krawędzi wózka dwugąsienicowego (rys. 5.31 a), tj. l-i-2 i 4-^5 gąsienicy lewej, oraz odpowiednich krawędzi I'h-2' i 4'-f-5' gąsienicy prawej konieczny jest moment
W przypadku obrotu jednej gąsienicy o szerokości B = bg i długości L, podłoże będzie ścinane tylko przez dwie krawędzie 1-.-2 i 4--5 (rys. 5.32a). Zatem
(5.34)
My = ^ My J+2
ih, L-2 sin<5
(5.33)
th, L2
4 sind
Moment związany z obrotem krawędzi 2-^3 w wózku dwugąsienicowym (rys. 5.32 b) po podstawieniu cosa = * odpowiednio wynosi
B
x_ 2
— f rdxcosa R
2-r- 3 J smd
_chz_ 2 sin b
xdx
r3 =
rh, bg^bg + d) 2 sinó
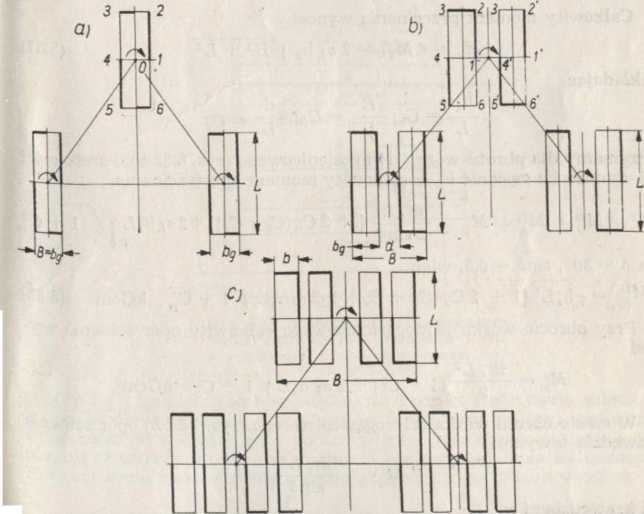
Rys. 5.32. Układy podwozi gąsienicowych zagłębionych w podłożu a — wózek jednogąsienieowy, b — wózek dwugąsienicowy, c — wózek czterogąsienicowy
943
Wyszukiwarka
Podobne podstrony:
HWScan00167 Jednostkowy powierzchniowy opór kopania kF według wzoru (4.2) kr == kFn j/ -yy- 0,9
HWScan00055 (2) gdzie GSI K P^ralneg0 zsypu. Klasyfikacja Protodiakonowa z 1908 r. przyjmuje po-• Uł
HWScan00105 /I _L0 k, - kG/cm2 ■l) > J i wych oporów kopania powierzchniowych kF albo liniowych k
HWScan00235 T (kG/cm2) jest proporcjonalna do naprężenia p (kG cm2) prostopadłego do powierzchni ele
IMG!61 gdzie: r - emisja własna jednostkowa (powierzchniowa gęstość promieniowani*), w [W/m2J, A — p
Jednostki Q, kg/cm2, M/mm2 psi, MPa Statystyka Lokalna*, mediana,
HWScan00186 Tablica 5.6 Jednostkowa podatność podłoża Rodzaj i stan podłoża Po, kG cm3 ]
HWScan00193 B gdzie co = — oznacza prędkość kątową podwozia przy obrocie o kąt i cza-sie obrotu to o
HWScan00194 ■est w jednostce czasu. Krzywa BO jest ewolwentą, zaś BC yx a CO Ł vy. Wypadkowa prędkoś
TABELĄ DQ PRZELICZANI A JEDNOSTEK C!SNIEN!A Pa hPa (mbar) kPa bar MPa at (kG/cm2) mm Hg
43 (261) ODPRĘŻANIE CZĘŚCI SZKLANYCH LAMP 43 gdzie: a — naprężenie w szkle, w kG/cm2, R — różnica dr
DSC01858 2 gdzie q — jednostkowe zużycie MW, kg/m3, w — zabiór, m, n — wskaźnik działania wybuchu. 7
kralY ct<, = — kG/cm2, az ~ C ■ Ob kG/cm2,N gdzie a0 — — kG/cm2.Fb Oznaczenia: B i C — współczynn
kral` Ob — — kG , cm2, az — C - oo kG/cm2, N gdzie o0 — — kG/cm2.Fb B i C — współczynniki podane w t
więcej podobnych podstron