HWScan00198
a zmierzony
Badania koparki kołowej [68] z trzema podwójnymi gąsienicami o układzie sterowania pokazanym na rys. 5.21, wykazały zgodność między obliczonym i rzeczywistym przesunięciem środka obrotu M, wywołany^ na skutek poprzecznych poślizgów gąsienic. W badanym urządzeniu teor . tyczny współczynnik jakości sterowania wynosił
u>stt - 91,6%
wstp = 92%
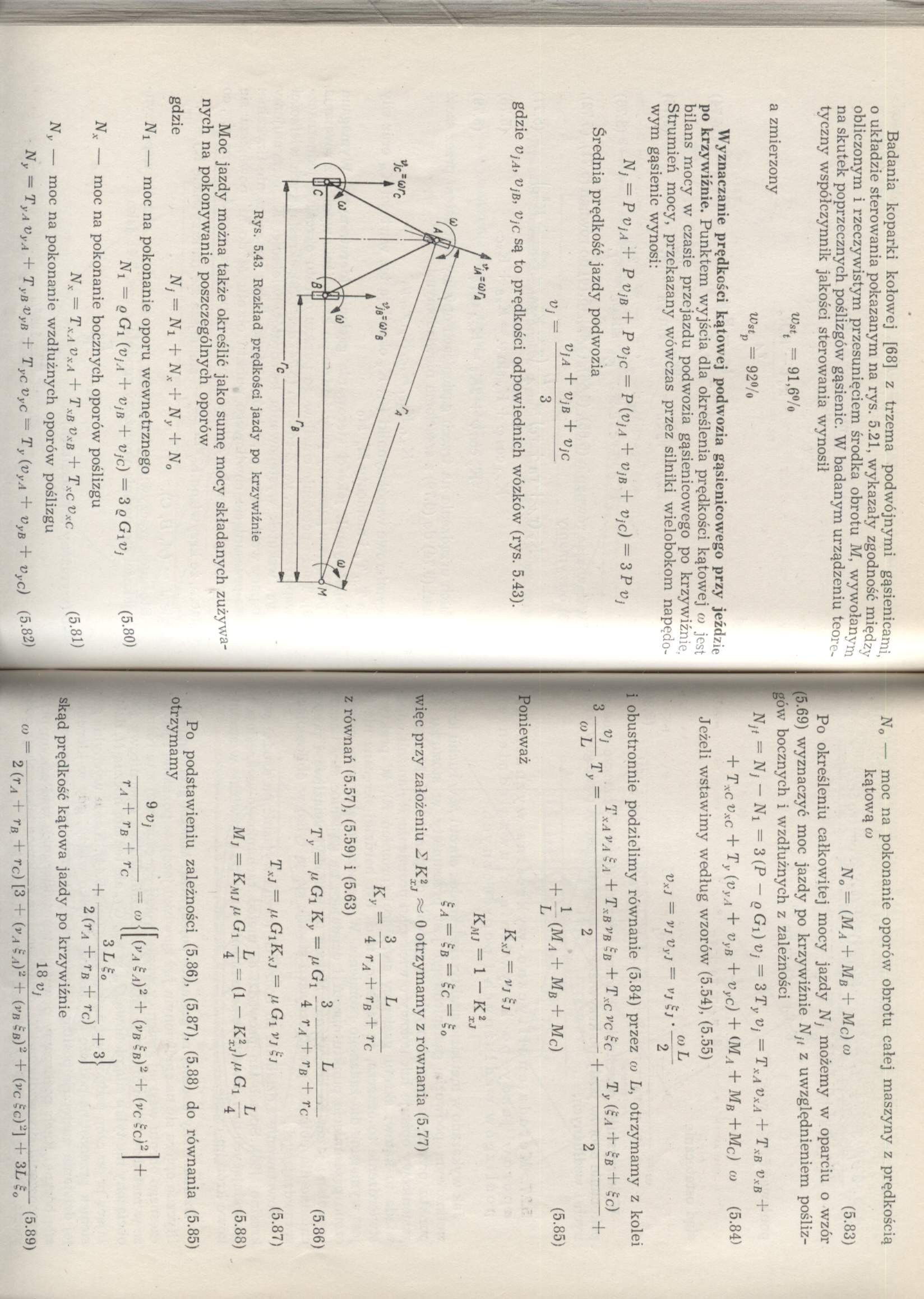
Wyznaczanie prędkości kątowej podwozia gąsienicowego przy jeździe po krzywiźnie. Punktem wyjścia dla określenia prędkości kątowej co jest bilans mocy w czasie przejazdu podwozia gąsienicowego po krzywiźnie. Strumień mocy, przekazany wówczas przez silniki wielobokom napędowym gąsienic wynosi:
Nj = P VJA + P VjB + PvjC = P (VjA + VjB + Vjc) = 3PVj Średnia prędkość jazdy podwozia
Vja + v]B + vjC
vj= -3-
gdzie vjA, Vjb, vjC są to prędkości odpowiednich wózków (rys. 5.43).
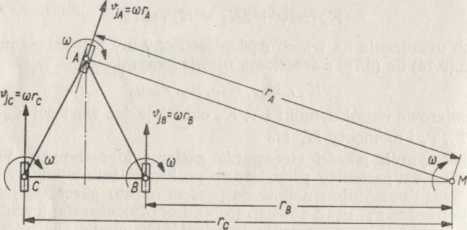
Rys. 5.43. Rozkład prędkości jazdy po krzywiźnie
| — m0c na pokonanie oporów obrotu całej maszyny z prędkością
kątową co
N0 = (M ą + Mb + Mc) w (5.83)
[ Po określeniu całkowitej mocy jazdy Nj możemy w oparciu o wzór 1(5.69) wyznaczyć moc jazdy po krzywiźnie Njt z uwzględnieniem pośliz-
[ów bocznych i wzdłużnych z zależności
Njt — Nj — N\ =3 (P — q Gi) Vj = 3 Ty Vj = TxA vxA ”1“ Txb vxR -k
+ Txc vxc + Ty (vyA + vyB + vyc) + (MA + Mr +Mc) w (5.84)
| Jeżeli wstawimy według wzorów (5.54), (5.55)
t <oL
VX] = VJ VyJ = VJ ĘJ * —g-
ilobustronnie podzielimy równanie (5.84) przez co L, otrzymamy z kolei
I Vt TxA va s a + TxB vb Sb + Txc vc £c (i;a + + £c)
13^irTy = --2-- + --2----+
+ 1 (M., + + Mc) (5-85)
Lj
Ponieważ
Kxj = vjij
Kmj = 1 “ K2XJ i;a = h = £c = fo
■więc przy założeniu Z K2XJ 0 otrzymamy z równania (5.77)
Ky 4 r^ + rs + rc
B równań (5.57), (5.59) i (5.63)
Ty — u Gi Ky — ju Gi ---— -r—
y A y r 4 rA + rB + rc
TxJ = /t GiKxJ = ju Gi vj
(5.86)
(5.87)
Moc jazdy można także określić jako sumę mocy składanych zużywanych na pokonywanie poszczególnych oporów
gdzie Nj = Ną + Nx + Ny + N0
Ni — moc na pokonanie oporu wewnętrznego
Ni = o Gi (vjA 4- Vjb + Vjc) = 3 o GiVj (5.80)
Nx — moc na pokonanie bocznych oporów poślizgu
Nx = T.v.i vxA + vxB + T,c vxC (5.81)
Ny — moc na pokonanie wzdłużnych oporów poślizgu
Ny = TyA vyA -i- TyB vyn -f Tyc vyc = Ty (vyA + VyB + vyC) (5.82)
M, = Kmj ,,G, -j = (1 - G,
(5.88)
Po podstawieniu zależności (5.86), (5.87), (5.88) do równania (5.85) otrzymamy
1
rA
3 LSc
2 (rA + rR + rc) skąd prędkość kątowa jazdy po krzywiźnie
18 Vj
+
2 (rA + rB + rc) [3 + (v.i l.i)2 + (vB $b)2 + (*c fc)“] + 3L
(5.89)
Wyszukiwarka
Podobne podstrony:
HWScan00183 koparki kołowej o ciężarze 6260 T ma gąsienicowy mechanizm jazdy pod częścią koparkową (
HWScan00064 (2) Rys. 1.13. Współpraca koparki łańcuchowej z mostem przerzutowym [162J jest sposób pr
HWScan00228 Tablica G.] Charakterystyki przenośników koparki kołowej WK
HWScan00080 Iiys. 2.12. Koparka łańcuchowa WŁ800 produkcji krajowej 12251 Tablica 2.5Charakterystyki
HWScan00160 że także i w koparkach kołowych nie istnieje stały stosunek wielkości Stosunek ten rośni
HWScan00246 Przykładem rozwiązania układu zabezpieczającego przed utratą stateczności jest koparka p
68 (124) Rozpoznanie ■ Rozpoznanie może być podstawie na podstawie badania
KOPARK~1 (2) Koparki kołowe
DSC01995 Zasięgiem urabiania koparki kolowe
plyta 2 2. Zadanie główne Badanie płyty kołowej o grubości 5 = 2 mm , podpartej przegubowo na obwodz
228 Badanie skorups ziemskiej szemrzący, który przed oczyma naszemi skrzętnie piasek na dół unosi,
236 236 Badania wszechświata. musielibyśmy kulki wyobrażające planety w naszym układzie zmniejszonym
371 Badanie morza. morza. Zamykamy wykaz ten podaniem kilku dzieł, zasługujących na zaznaczenie, jak
Badania SEM powierzchni styków z kompozytu WC-Ag... i mechanizmów opiera się na badaniach zmian powi
więcej podobnych podstron