7506567238
b)
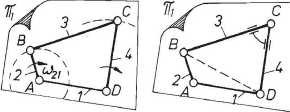
Rys. 14. Ilustracja pojęcia ruchliwości łańcucha kinematycznego: a) łańcuch o ruchliwości W= 1, b) układ sztywny
układ ABCDE, z rys. 15a, charakteryzuje się ruchliwością W= 2; do otrzymania zeń układu sztywnego potrzeba dwóch ograniczeń ruchu, np. w parach B i E (rys. 15b).
Układ jest jednobieżny, jeżeli liczba członów czynnych odpowiadajego ruchliwości. Ruchliwość układu można więc w prostych przypadkach ocenić intuicyjnie, można jednak również dokonać tego w sposób formalny, stosując tzw. wzory strukturalne (podrozdz. 1.5).
1.4. Mechanizm, układ, maszyna
1. Pojęciem mechanizm będziemy określać zamknięty łańcuch kinematyczny z jednym członem spełniającym funkcję podstawy, charakteryzujący się liczbą członów czynnych równą jego ruchliwości. Będziemy więc nazywać mechanizmem układ jednobieżny umożliwiający przekazywanie ruchu, często z jednoczesną zmianą jego parametrów. Oczywiście, realizacja tego zadania jest możliwa z udziałem sił, ale istotą mechanizmu jest ruch. Kilka przykładów mechanizmów zestawiono na rys. 16.
Na rysunku 16a przedstawiono układ umożliwiający zamianę ruchu obrotowego członu (2) względem podstawy (1) na ruch obrotowo-zwrotny (wahadłowy) członu (4) względem podstawy. Mechanizm krzywkowy (rys. 16b) zamienia ruch obrotowy krzywki (2) na ruch postępowy członu (3), mechanizm zębaty zaś (rys. 16c) umożli-
a)
b)
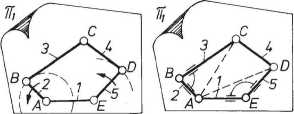
Rys. 15. Ilustracja pojęcia ruchliwości łańcucha kinematycznego: a) łańcuch o ruchliwości W = 2, b) układ sztywny
Wyszukiwarka
Podobne podstrony:
img167 y x, x0 x Rys. 8.7 Ilustracja pojęcia poprawionej śr
IMGc29 (2) Rys. 14. Graficzna ilustracja przebiegu względnego kąta skręcenia między wejściem i wyjśc
Kinematyka Punkt Sjest chwilowym środkiem obrotu dla wodzika AB (rys. 2.14). Możemy zatem wyznaczyć
044 4 Rys. 3.36. Odkręcanie nakrętki koła łańcuchowego 14. Wkrętakiem odbezpieczyć
056 3 Rys. 5.14. Sposób ścinania nitów łączących kosz sprzęgła z koszem łańcuchowym Rys. 5.15. Sposó
57941 S6302548 18,5 kW 1475obr/irin 3 DL wyw 1475 obr/min Rys. 14.2. Schemat kinematyczny
str0007 ŚWIAT BIORCA DZIAŁAŃ B Rys. 1. Ilustracja pojęcia kręgu funkcji. A — krąg funkcji w ujęciu J
img233 (18) NADH+H % Rys. 14.6. Łańcuch oddechowy - schemat [5] 14.3.2. Chcmolltotrofy Zaliczamy do
Bazy danych 45 Rys. 2.6 Przykład klucza obcego (FK1) Przykład ilustrujący pojęcie klucza obcego poka
3tom097 3. SIECI ELEKTROENERGETYCZNE196 Rys. 3.14. Łańcuch izolatorów linii 4(X) kV przelotowy, jedn
Biomechanika wyklady0014 Rys.3 przedstawia przykład obliczeń ruchliwości łańcucha otwartego i zamkni
więcej podobnych podstron