38135
Klasyfikacja robolów przemysłowych:
Roboty dzieli się przy wyróżnieniu klasy i możliwości sterowania pracą robota:
a) robot sekwencyjny - robot wyposażony w sekwencyjny układ sterowania,
b) robot realizujący zadane trajektorie - realizuje ustaloną procedurę sterowanych ruchów według instrukcji programowych specyfikujących żądane pozycje oraz żądaną prędkość ruchu
c) robot adaptacyjny - mający sensotyczny lub adaptacyjny układ sterowania, względnie uczący się układ sterowania ( przykłady: układ o możliwości zmiany właściwości dzięki wykorzystaniu informacji sensorycznych lub nagromadzonych doświadczeń)
d) teleoperator - robot ze sterowaniem zdalnym realizowanym przez operatora lub komputer. Jego funkcje są związane z przenoszeniem na odległość funkcji motorycznych i sensorycznych operatora.
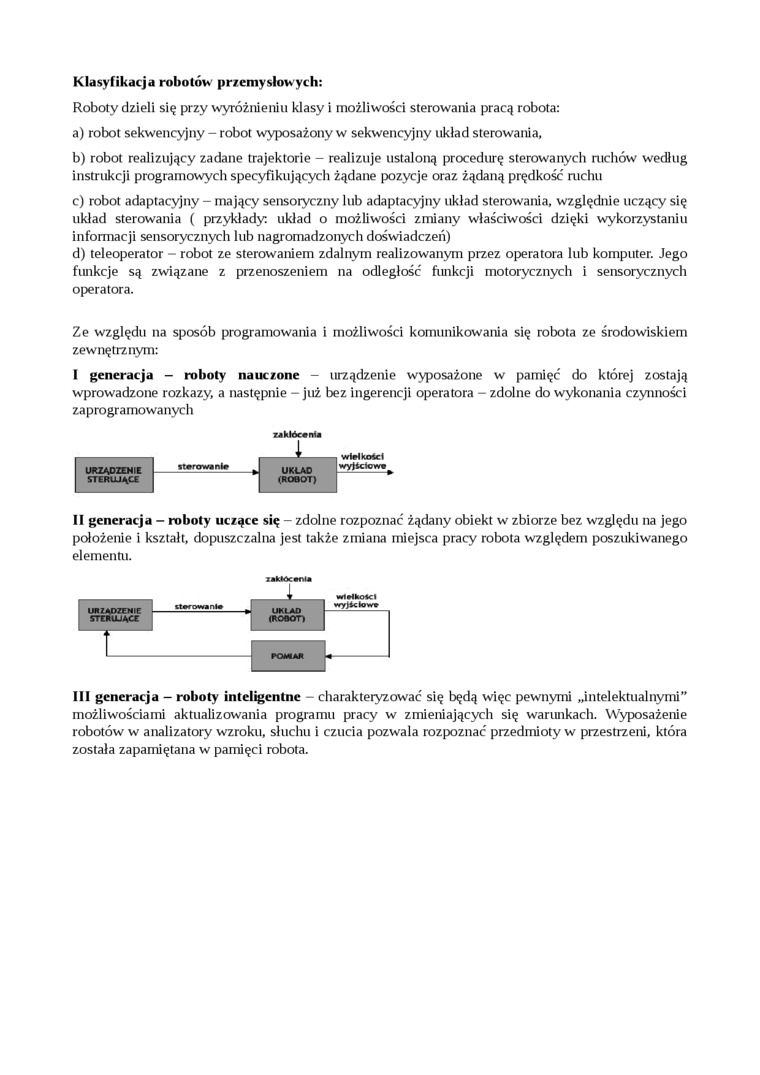
Ze względu na sposób programowania i możliwości komunikowania się robota ze środowiskiem zewnętrznym:
I generacja - roboty nauczone - urządzenie wyposażone w pamięć do której zostają wprowadzone rozkazy, a następnie - już bez ingerencji operatora - zdolne do wykonania czynności zaprogramowanych
ukłóc«ni«
|
ltnrowinlr |
wy)4c»ow»_ | ||
|
STERUJĄCE |
(ROBOT) |
II generacja - roboty uczące się - zdolne rozpoznać żądany obiekt w zbiorze bez względu na jego położenie i kształt, dopuszczalna jest także zmiana miejsca pracy robota względem poszukiwanego elementu.
URZĄDZENIE
STERUJĄCE
it»fOvanlł
wlHkottl
wyjicłow*
ROMAN
III generacja - roboty inteligentne - charakteryzować się będą więc pewnymi „intelektualnymi” możliwościami aktualizowania programu pracy w zmieniających się warunkach. Wyposażenie robotów w analizatory wzroku, słuchu i czucia pozwala rozpoznać przedmioty w przestrzeni, która została zapamiętana w pamięci robota.
Wyszukiwarka
Podobne podstrony:
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
W2 b Page Model ośrodka ziarnistego, klasyfikacje międzynarodowe Ziarna i cząstki dzieli się wg wie
Nazewnictwo/klasyfikacja enzymów EC Enzymy dzieli się na 6 grup (mechanizm reakcji...): EC 1
P1080192 (2) 2. Definicje i klasyfikacja robolów przemysłowych 2.2.1. Klasyfikacja robotów ze względ
Wśród rozmaitych zagadnień, jakie pojawiają się przy okazji naszej sprawy, chciałbym wyróżnić jedno:
P3190294 14 Wojciech Kalinowski wymiarach 144 x 144 stopy /85, 8 x 85, 8 m/, przy czym każdy blok dz
IMGd42 W od naturalne w Polsce dzieli się na 3 klasy czystości. Zasady klasyfikacji wód w Polsce okr
skanuj0025 3 24 Budowlane roboty przygotowawcze3. Przebieg budowy Przebieg robót budowlanych dzieli
HPIM0762 MATEMATYKA 2.2. Klasyfikacja robotów przemysłowych Ze względu na rozwiązania kinematyczne r
141 przemysłów ciężkich do krajów rozwijających sie, przy stałym czerpaniu korzyści z importu surowc
w8) Systematyka soli c.d.
WPe • Wyróżniamy 12 par żeber • Wyróżniamy 12 par żeber • Żebra dzieli się na: . prawdziwe - 7 górny
Rozwój robotów 1. Przyczyny rozwoju robotów Pierwsze roboty pojawiły się w amerykańskim przemyśle
więcej podobnych podstron