121984
a a = aB = ac
dMO
dr 4. Ruch obrotowy dala sztywnego
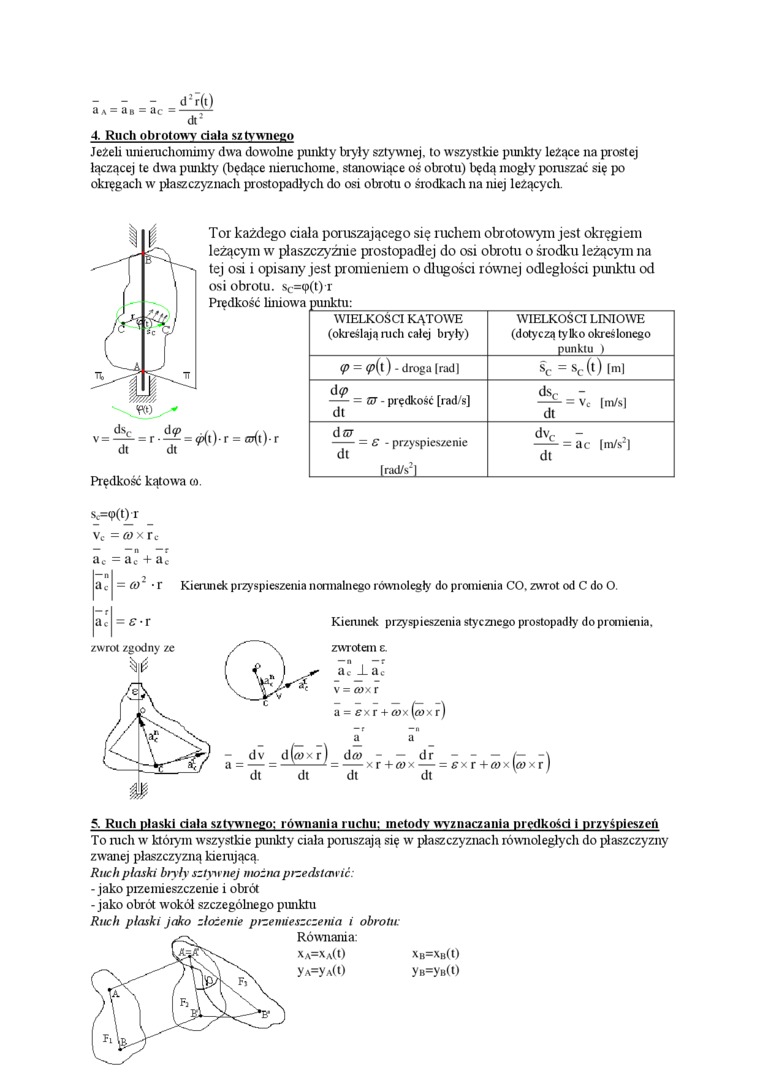
Jeżeli unienichomimy dwa dowolne punkty bryły sztywnej, to wszystkie punkty leżące na prostej łączącej te dwa punkty (będące niemehome, stanowiące oś obrotu) będą mogły poruszać się po okręgach w płaszczyznach prostopadłych do osi obrotu o środkach na niej leżących.

Tor każdego ciała poruszającego się ruchem obrotowym jest okręgiem leżącym w płaszczyźnie prostopadłej do osi obrotu o środku leżącym na tej osi i opisany jest promieniem o długości równej odległości punktu od osi obrotu. Sc=<p(t) r Prędkość liniowa
= «Kt)r = ®(t)r Prędkość kątowa o).
|
WIELKOŚCI KĄTOWE (określają ruch całej bryły) |
WIELKOŚCI LINIOWE (dotyczą tylko określonego punktu ) |
|
<p = <p(t) - droga |rad) |
= (0 lml |
|
dtp -= tu - prędkość [rad/s] dt |
dsc -—- = Vc [m/s| dt |
|
dtu -= € - przyspieszenie dt [rad/s2l |
dvr - , -= ac |m/s‘) dt |
Sę=<P(t)T _ vc =<yx r c
— n —r
ac
— n
ac
Kierunek przyspieszenia normalnego równoległy do promienia CO. zwrot od C do O.
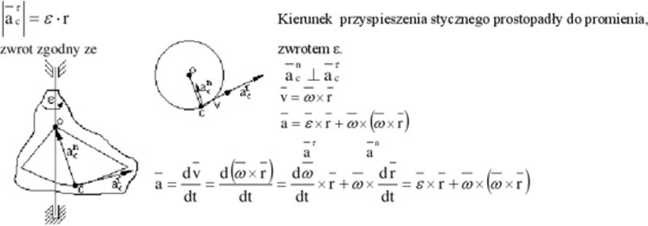
— a c + a c = co2 -r
5. Ruch płaski dała sztywnego: równania ruchu: metody wyznaczania prędkości i przyśpieszeń
To nich w- którym wszystkie punkty ciała poruszają się w płaszczyznach równoległych do płaszczyzny zwanej płaszczyzną kienijącą.
Ruch płaski bryły sztywnej można przedstawić:
-jakopizemieszczenie i obrót
- jako obrót wokół szczególnego punktu
Ruch płaski jako złożenie przemieszczettia i obrotu
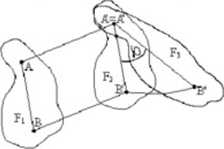
Równania:
Xb=Xb(0
yB=yB(t)
Xa=Xa(0
yA=yA(t)
Wyszukiwarka
Podobne podstrony:
30998 P1020202 MOMENTY BEZWŁADNOŚCI RUCH OBROTOWY CIAŁA SZTYWNEGO I Rozpatrzmy ruch obrotowy dała sz
P1010929 (4) RUCH OBROTOWY CULA SZTYWNEGO Ruch ciała sztywnego określony jest przez ruch trzech punk
P1010929 (5) RUCH OBROTOWY CIAŁA SZTYWNEGO Radl ciała sztywnego określony jest przez ruch trzech pun
6a (46) 18. Ruch obrotowy ciała sztywnego (równania różniczkowe ruchu, energia kinetyczna). Im1 2 En
464 (10) 464 RYS. 15.5. 15. Ruch płaski dała sztywnego ROZWIĄZANIE Wiemy ze statyki, że w przypadku
468 (12) 468 16. Ruch płaski dała sztywnegoi W ROZWIĄZANIE Oznaczając przez x przemieszczenie deski,
469 (6) — cosąp. 15. Ruch płaski dała sztywnego gtadkte. pręt zaczyna się zsuwać w dół bez prędkości
471 (11) 15. Ruch płaski dała sztywnego Z zasady równowartości energii kinetycznej i pracy dostaniem
474 (10) 474 15. Ruch płaski dała sztywnego a momenty bezwładności Ii = —mjrf Chwilowy środek obrotu
Ruch obrotowy ciała sztywnego - c.d.1 II zasada dynamiki Newtona dla i-tego punktu: dt (m,v,) =
Ruch obrotowy ciala sztywnego . c)oroou.j ( ffrędktói lc<
P1020083 (2) Ruch ogólny dala sztywnego Ruch ciała sztywnego w przestrzeni jest jednoznacznie określ
więcej podobnych podstron