3703947798
1. (20) Podstawowy schemat morskiego systemu informacyjnego. Równanie sonaru.
Schemat morskiego systemu informacyjnego:
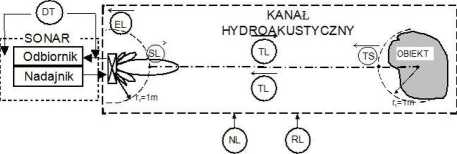
Oznaczenia:
EL - poziom echa (zachodzi EL = NL + DT)
SL - poziom dźwięku źródła (czyli w momencie emisji)
TL - straty transmisji
TS - siła celu (to jak bardzo odbija on falę dźwiękową)
NL - poziom szumu DT - próg detekcji
Z oznaczeń powyżej i rysunku wynika bezpośrednio równanie sonaru:
SL - 2TL + TS = NL + DT (czyli = EL)
Tak po ludzku: od sygnału puszczonego w wodę odejmujemy 2x straty transmisji (bo leci w 2 strony) i dodajemy silę celu, czyli to jak bardzo się nasz dźwięk odbił. Jest to równe prawej stronie równania czyli poziomowi echa jakie do nas dociera. W pełnej postaci równania poziom echa (EL) jest rozbity na sumę szumów (NL) oraz tej części sygnału która wystaje ponad szum (DT).
2. (21) Detekcja sygnałów echa hydroakustycznego.
Sygnał echa to to co powstaje z syngalu wysłanego (np. z sonaru) po przeleceniu w te i z powrotem przez wodę i odbiciu się od celu. Niestety, jak to w życiu byw'a, echo dociera do nas zaszumione. W grę wchodzą tu 3 rodzaje zakłóceń:
T(t) - zakłócenia multiplikatywne, czyli w ogólności zmienne (np. z powodu różnych poziomów zasolenia prądów morskich) w czasie i mające częściowa charakter losowy tłumienie ośrodka (wody) n(t) - szum
r (t) - rewerberacje, inaczej zjawiska związane z pogłosem. O tym co to pogłos było na PDiO.
Wprow'adźmy także dodatkowe oznaczenia:
v(t.xl - odebrane echo (jak by nie patrzeć sygnał losowy)
e (t,x) - sygnał wejściowy
Wyszukiwarka
Podobne podstrony:
DSC00011 (20) (D)Podstawy Systemów informacyjnych — kolokwium II Xi słowa kodowe A 00 00 100 B 0
431 (5) 20. Podstawy planowania nawigacji morskiej 431 ZBIÓR INFORMACJI (źródła dotyczące planowania
443 (5) 20. Podstawy planowania nawigacji morskiej 443 Rys. 20.10. Schemat uzupełniający do procesu
skanuj0023 (75) stronica 20 EN ISO 14683:1999Załącznik A (informacyjny)Obliczeniowe podstawy wartośc
skanuj0023 (75) stronica 20 EN ISO 14683:1999Załącznik A (informacyjny)Obliczeniowe podstawy wartośc
• stosowanie podstawowych narzędzi programów systemu informacji przestrzennej w analizach
BEZPIECZEŃSTWO SYSTEMÓW KOMPUTEROWYCH I 20 Podstawy Internetu pomocą numeru sekwencji, który może by
20 (33) Etapy rozwoju systemów analitycznych 1. zdobycie informacji o odpowiedniej
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
57929 PICT0029 (10) 54 J. Bcndkowski, G. Radziejowska 2.4.2. Systemy informatyczne Podstawowymi częś
426 (7) 20. PODSTAWY PLANOWANIA NAWIGACJI MORSKIEJ20.1. Struktura budowy planu podróży Zgodnie z kon
427 (5) 427 20 Podstawy planowania nawigacji morskiej20.2. Proces planowania podróży W każdej sytuac
433 (5) 20 Podstawy planowania nawigacji morskiej 433 ograniczenia, jakie mogą pojawić się przy real
435 (6) 20 Podstawy planowania nawigacji morskiej 435 Szczegółowy plan sporządza się po uzgodnieniu
437 (5) 20 Podstawy planowania nawigacji morskiej 437 Rys. 20.7. Fragment szkicu w brulionie nawigac
więcej podobnych podstron