4806164945
Logistyka - nauka
dopuszczalnej wielkości. Bardziej wymagająca metoda aktywna, wymaga ciągłej kontroli i korygowania jazdy suwnicy poprzez odpowiednie sterowanie elektronapędami jazdy, tak aby utrzymać zukosowanie w założonych granicach. Algorytm sterowania powinien móc, uwzglęniając np.: szybkość zmian zukosowania, reagować z wyprzedzeniem, tak aby wprowadzane korekty nie wprowadzały dodatkowych obciążeń, np.: od przyspieszeń przemieszczanych przez suwnicę jednostek ładunkowych
Pomiar sił bocznych odgrywa rolę pomocniczą, ale umożliwia orientacyjną ocenę co do kierunku zmian stopnia zukosowania. Niestety, ocena uzyskiwanych wielkości sił bocznych musi uwzględniać wykonywane zadania transportowe (monitorowane przez układ sterowania), gdyż np.: przyspieszenia wózka wciągarki przemieszczającej się w kierunku prostopadłym do torowiska będą wpływały na wielkość mierzonych sił bocznych.
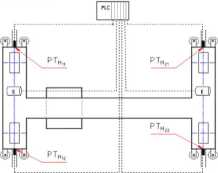
Rys. 9. Schemat systemu pomiarowego do kontroli zukosowania suwnicuy (E-enkodery inkrementalne)
WNIOSKI
Przedstawiony system pomiarowy umożliwia pozyskiwanie informacji na temat zukosowania całkowitego suwnicy pomostowej poruszającej się po torowisku. Wykorzystanie dodatkowych rolek pomiarowych (tzw. „piąte koła”) pozwala praktycznie wyeliminować ewentualne błędy wynikające z poślizgów biernych kół jezdnych suwnicy.
Opisany układ pomiarowy zostanie wykorzystany do zbudowania systemu spełniającego rolę ogranicznika zukosowania suwnicy. Wymaga to przebudowy układu sterowania tak aby umożliwić indywidualne sterowanie każdym z obu elektronapędów jazdy suwnicy.
Ponadto, przedstawiony układ do pomiaru sił bocznych pozwala na eksperymentalną weryfikację ich wielkości w stosunku do wyników uzyskiwanych drogą analityczną według algorytmów obliczeniowych opisanych w normach [8, 9].
Streszczenie
W artykule przedstawiono zagadnienie ukosowania suwnic jako zjawiska istotnego dla bezpiecznej eksploatacji suwnic i poprawnego ich wymiarowania. Scharakteryzowano czynniki wpływające na wielkość zukosowania suwnicy. Opisano możliwości eksperymentalnej identyfikacji wielkości zukosowania suwnicy i zaproponowano wielkości fizyczne będące dobrą miarą zukosowania całkowitego suwnicy.
Przedstawiono zaimplementowany na laboratoryjnej lekkiej suwnicy pomostowej nalotowej układ pomiarowy umożliwiający zarówno pomiar sil bocznych jak i identyfikację parametrów kinematycznych jazdy suwnicy (położenia i prędkości obu czolownic) w celu określenia wielkości zukosowania całkowitego suwnicy. Zastosowane w tym przypadku znane z techniki pojazdowej tzw. „piąte kolo” umożliwia wyeliminowanie poślizgów stosowanych dotąd biernych kól jezdnych suwnicy.
Słowa kluczowe: suwnice pomostowe, ukosowanie suwnic, obciążenia dynamiczne, systemy pomiarowe

Logistyka 3/2015
Wyszukiwarka
Podobne podstrony:
Logistyka - nauka 1.1 Metoda uproszczona W metodzie uproszczonej zakłada się liniową zależność
Logistyka - nauka hm - średnia wysokość odkształcenia trwałego pojazdu w teście zderzeniowym. 1.2 Me
Logistyka - nauka Maciej Mindur Politechnika WarszawskaOrganizacja transportu kolejowego we
Logistyka - nauka basenie Morza Śródziemnego jest Marsylia, natomiast najwięcej kontenerów jest
Logistyka - nauka Źródło: http://www.bueker.net/trainspotting/maps_france.php (4.04.2014) Głównym
Logistyka - nauka przez TGV, natomiast w pozostałych przewozach dalekobieżnych nieznaczny spadek - o
Logistyka - nauka wchodzi 18 komputerów połączonych siecią zwaną TORNAD [3]. W 2007 roku został usta
Logistyka - nauka - Thalys - spółka utworzona przez koleje francuskie SNCF (70% ud
Logistyka - nauka kolejowych przewozów towarowych na rynku krajowym oraz międzynarodowym, który jest
Logistyka - nauka Reforma kolei francuskich Priorytetem rządu francuskiego od lat był rozwój kolei d
Logistyka - nauka jak i krótkich dystansach. Streszczenie W artykule przybliżono stan francuskiej
więcej podobnych podstron