490575395
Rozdział 3
Silniki skokowe
3.1 Typy silników skokowych
Silniki krokowe są urządzeniami elektromechanicznym, przekształcającymi impulsy elektryczne w dyskretne ruchy mechaniczne. Obroty silnika związane są bezpośrednio z podawanymi impulsami na kilka sposobów. Kierunek obrotów jest ściśle związany z sekwencją ich podawanych, prędkość obrotów zależy od częstotliwości, zaś kąt obrotu - od ich ilości.
Wyróżniamy trzy podstawowe rodzaje silników skokowych pod względem budowy:
- silniki o zmiennej reluktancji (VR)
- silniki z magnesami trwałymi (PM)
- silniki hybrydowe (HB).
Obecnie w zastosowaniach komercyjnych wykorzystywane są tylko i wyłącznie silnik hybrydowe [4], Łączą one w sobie zalety silników ze zmienną reluktancją oraz silników z magnesem trwałym. Stojan silnika HB posiada przeważnie dwa uzwojenia i osiem biegunów, zaś rotor magnesy rozmieszczone osiowo. Pod względem budowy, bardzo ważnym elementem silników hybrydowych są żłobki występujące na czołach biegunów stojana oraz na powierzchni wirnika. Obecność magnesu stałego powoduje ustawianie ich naprzeciw sobie, co wywołane jest maksymalnym przepływem strumienia magnetycznego w ferromagnetykach. Typowa rozdzielczość silnika wynosi 100 - 400 kroków na obrót. Schemat budowy silnika HB przedstawiono na rysunku nr 3.
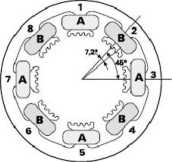
Rys. 3 Schemat budowy stojana silnika hybrydowego
Wyszukiwarka
Podobne podstrony:
Silniki Krokowe - definicja Silniki krokowe, zwane też skokowymi, przekształcają impulsy elektryczne
Silnik skokowy czy krokowy? W Polsce odpowiedź jest jednoznaczna -oczywiście skokowy i to od ponad ć
4.2. Silniki krokowe i silniki liniowe4.2.1. Materiał nauczania Silniki krokowe (skokowe) Silniki kr
Image 83 87 Do zaler silników krokowych (skokowych) z magnesami trwałymi należą [25,24]: -
3.3 Zalety i wady silników skokowych Specyficzna (dyskretna) zasada działania silników krokowych, ni
badanie silnika krokowego02 tif Cel ćwiczenia Celem ćwiczenia jest zapoznanie z działaniem silnika s
SDC12994 7. Scrwonapędy z silnikami skokowymi szeregowe obwody są zasilane stałoprądowymi impulsami
Silniki krokowe Wyróżnia się dwa typy: • Z magnesem trwałym (ang. permanent-magnet
instalacje080 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 44 Szkic konstrukcyjny urządzenia w dw
skanuj0595 194 Rozdział 7 technologia B skokowo zastępuje starą technologię A10. Ten przeskok na kol
więcej podobnych podstron