8416072404
Kinematyka manipulatora
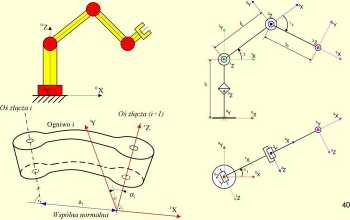
Z każdym ogniwem manipulatora, w tym z podstawą oraz efektorem (chwytakiem, narzędziem), związany jest układ współrzędnych kartezjańskich. Kinematyka określa relacje pomiędzy tymi układami w funkcji obrotów i przesunięć w kolejnych złączach.
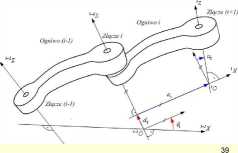
Przykład zastosowania notacji Denavita-Hartenberga
20
Wyszukiwarka
Podobne podstrony:
8 Kinematyka prędkoci Macierz J zdefiniowana w 3.6 jest nazwywana jakobianem manipulatora i jest pod
Kinematyka manipulatora przemysłowegoPodstawy programowania robotów Podstawowa metoda programowania
IMG&65 a) Na podstawie rysunku podaj, ile pręcików znajduje się w tym kwiecie, ora
16 1. Wolfram Mathematica1.2. Modelowanie kinematyki manipulatorów Do modelowania kinematyki manipul
1.2. Modelowanie kinematyki manipulatorów 17 al = ll alphal=0 dl=0 thetal=ql joint2=revolute a2
Kinematyka manipulatora przemysłowego Macierz rotacji >zA 1 Orientacja osi ukła
Kinematyka manipulatora przemysłowego Kąty XYZ • Kąty XYZ (zwane kątami RPY z ang. Roll-Pitch-Yaw —
Kinematyka manipulatora przemysłowego Opis ruchu manipulatora - kinematyka manipulatora •
Kinematyka manipulatora przemysłowego Nr ogniwa a
Kinematyka manipulatora przemysłowego Zadanie odwrotne kinematyki — polega na określeniu zestawu
Robot przemysłowy Struktury kinematyczne manipulatorów przemysłowych Do opisu ruchu manipulatorów
więcej podobnych podstron