1950083650
7
Laboratorium Podstaw Robotyki - 6
przycisków oznaczonych symbolem „+”) lub do tyłu (zestaw przycisków oznaczonych symbolem Możliwe jest równoczesne przemieszczanie wielu osi. W takim przypadku świeci się jedynie lampka kontrolna ostatniego wciśniętego przycisku osi (+ lub -) oraz lampka Jog (13). Po wciśnięciu jednego z przycisków SEL sekcji Jog (13), numer wybranej osi zmienia się, a odpowiadająca jej lampka kontrolna na zestawie klawiszy (4) zaświeca się. Po wciśnięciu jednego z przycisków „+ / sekcji Jog, wybrana oś ulega przemieszczeniu.
1.4.2 Przemieszczanie w trybie kartezjańskim (FRAME, TOOL)
Po włączeniu zasilania ramienia, wcisnąć przycisk Frame lub Tool w MCP. Zaświeci się lampka kontrolna. Wciskając przyciski sterowania ruchem (4) lub jeden z przycisków Sel sekcji Jog (13), możliwe jest wykonywanie przemieszczeń wzdłuż (przyciski X, Y, Z) lub wokół (przyciski RX, RY i RZ) trzech osi bieżącego punktu odniesienia (domyślnie Frame). Przemieszczenia wykonywane są w kierunku do przodu (zestaw przycisków oznaczonych symbolem „+”) lub do tyłu (zestaw przycisków oznaczonych symbolem „-”). Jeżeli wciśnięty został przycisk Tool, przemieszczenia są wykonywane wzdłuż / wokół osi bieżącego układu powiązanego z narzędziem (domyślnie jest to zmienna o nazwie f lange typu tool).
Przywiązanie charakterystycznych kartezjańskich układów współrzędnych (układ globalny, układ narzędzia) przedstawiono na rys. 6.
z+
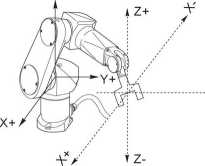
Rysunek 6: Sposób przywiązania osi kartezjańskich układów współrzędnych dla manipulatora TX60L.
1.4.3 Przemieszczanie w trybie POINT
Tryb POINT umożliwia sterowanie przemieszczeniami tylko według punktów zapamiętanych w danej aplikacji. Aby wyświetlić punkty aplikacji, należy najpierw wybrać w niej narzędzie. Jeżeli wybrany zostanie tryb przemieszczania POINT, na ekranie wyświetlany będzie dodatkowo tzw. tryb przemieszczania (MODĘ). Może on przyjąć jedną z trzech wartości:
• Linę - przemieszczenie do punktu docelowego odbywa się po linii prostej,
• Joint - przemieszczenie odbywa się wg najkrótszej zmiany współrzędnych osiowych manipulatora,
• Align - oś Z narzędzia jest wyrównywana z najbliższą osią bieżącego punktu odniesienia. Punkt TCP narzędzia wykonuje obrót bez przesunięcia.
Robot rozpocznie przejazd do wybranego punktu po wciśnięciu przycisku Move / Hołd.
Wyszukiwarka
Podobne podstrony:
Laboratorium Podstaw Robotyki - 6 • (9) Przyciski interfejsu i nawigacji Za pomocą
2 Laboratorium Podstaw Robotyki - 6 Rysunek 1: Manipulator Staubli TX60. Na rysunku oznaczono numery
Laboratorium Podstaw Robotyki jest wyposażone w dwa roboty przemysłowo-ednkacyjne typ L2, produkcji
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii SystemówĆWICZEN
Laboratorium Podstaw Robotyki - 5 natarcia (podjazdu) narzędzia robota (patrz rys. 2). Pozycję począ
3 Laboratorium Podstaw Robotyki - 5 gdzie nx,ny,nz stanowią składowe wersora n wzdłuż odpowiednich o
Laboratorium Podstaw Robotyki - 5 Z macierzami rotacji związane są dwa podstawowe zadania
5 Laboratorium Podstaw Robotyki - 5 1.4 Napisać definicję macierzy rotacji R®u w
Laboratorium Podstaw Robotyki - 52 Transformacje jednorodne Transformacje jednorodne umożliwiają
Laboratorium Podstaw Robotyki - 5 K2. zadanie kinematyki odwrotnej położenia IKin - polega ono na ok
Laboratorium Podstaw Robotyki - 5 Przy tak zdefiniowanych parametrach i układach współrzędnych
9 Laboratorium Podstaw Robotyki - 5 3.1 Zapoznać się z opisem następujących funkcj
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii SystemówĆWICZEN
75* 75* 10 Laboratorium Podstaw Robotyki - 6 =ńpplication manager= — teaching "frane
11 Laboratorium Podstaw Robotyki - 6 =Jog Interface Tool:(Palette) gripper Frerne:(PaleCte)
12 Laboratorium Podstaw Robotyki - 6 • tool - typ opisujący narzędzie, zawiera
13 Laboratorium Podstaw Robotyki - 6 • for <num nCounter> = <num nBeginni
14 Laboratorium Podstaw Robotyki - 6 Rysunek 10: Widok pola Data w oknie głównym projektu.4.1
15 Laboratorium Podstaw Robotyki - 6 sięgu aplikacji) (patrz rys. 11). Okno zawiera typy proste i zł
więcej podobnych podstron