4597124107
łańcucha o kątach « = 208 dopuszczalna
spada do nd = d, a w przypadku dow^"nl®
nego do 2d. Można by tu jeszcze operować w pewnym za
kresie zmianą czynnika m° * “ ’ czyli zastosować w łań
cuchu trójkątów dokładniejsze Pomiary kątowe aniżeli wymagane w poligonizacji. Tak na przy kład, g > y
sować w łańcuchu zastępującym Pol.ł,?oniz?łc^ip1I«;ipkld^-m0 = 2", zamiast m0 = 12c= - możliwe sUnie siędopuszczenie przy trójkątach równobocznych n dhizoM
nawiązaniu 34d, zaś spłaszczenie trójkątów przy dłu„o. i nawiązanego łańcucha o długości 2d zwiększyć d
W praktyce można by się zgodzić na przekroczenie wyżej
• my‘ \i
podanych długości łańcuchów, a więc przyjęcie >
tyle razy, ile dla danego, wyznaczonego tu nma;< myp jest
mniejsze od maksymalnego b'ędu średniego, dopuszcza ne go w poligonizacji. Przyjmując przeto dla « n - 1, czyli myp = md, dopuszczalne w II klasie poligo
nizacji precyzyjnej my = = M5 oraz długość beku
do 1 km
my, _ <M5 ^ 2
myp 0,083
Z powyższego obliczenia wynika, że przy ^astosowanhi nieco dokładniejszych pomiarów kątów w i w ciągu poligonowym, dopuszczalna długość obustra nawiązanego łańcucha może się zwiększyć do o w przypadku stosowania trójkątów równoramienny o kątach a rzędu 10*. Widzimy więc, ze łańcuch tr<ojk^tow w warunkach spotykanych na trasach p°lagonlxacji g y mieć stosunkowo ograniczony zakres cuch czworoboków z przekątnymi jako zawierający 'ą ilość spostrzeżeń nadliczbowych mógłby j*3'^ sze rezultaty, jednak z drugiej strony pod tycznym stoi niżej od łańcucha trójkątów. Mi^owicie należy przypuszczać, że przy tym samym sposobie pomla kątów w tych samych warunkach, przez tego samego ob -watora i tym samym instrumentem, błędy pomiaru kątów w łańcuchu trójkątów będą mniejsze aniżeli w łańcuch czworoboków. Przyczyną tego stanu rzeczy k<J^y£lIJie3‘ 9ze stosunki długości celowych w spłaszczonych ^J^tac niż w czworobokach. Ponadto decyduje tu moment ^kono-miczny w związku z koniecznością stabdizowania w J3*}-cuchu spłaszczonych czworobokow parami b położonych punktów (około 100 m) lub też wykonywan.e pomiarów przy wykorzystaniu połowy punktów o stabilizacji tymczasowej, co uniemożliwiłoby kontrolę lub powtórzenie pomiaru. Na korzyść łańcucha czworobokow P1^™3” wiałaby większa łatwość projektowania w przypadku, gdy trasa ciągu odbiegałaby od prostoliniowej, a jednocześnie szerokość trasy byłaby ograniczona.
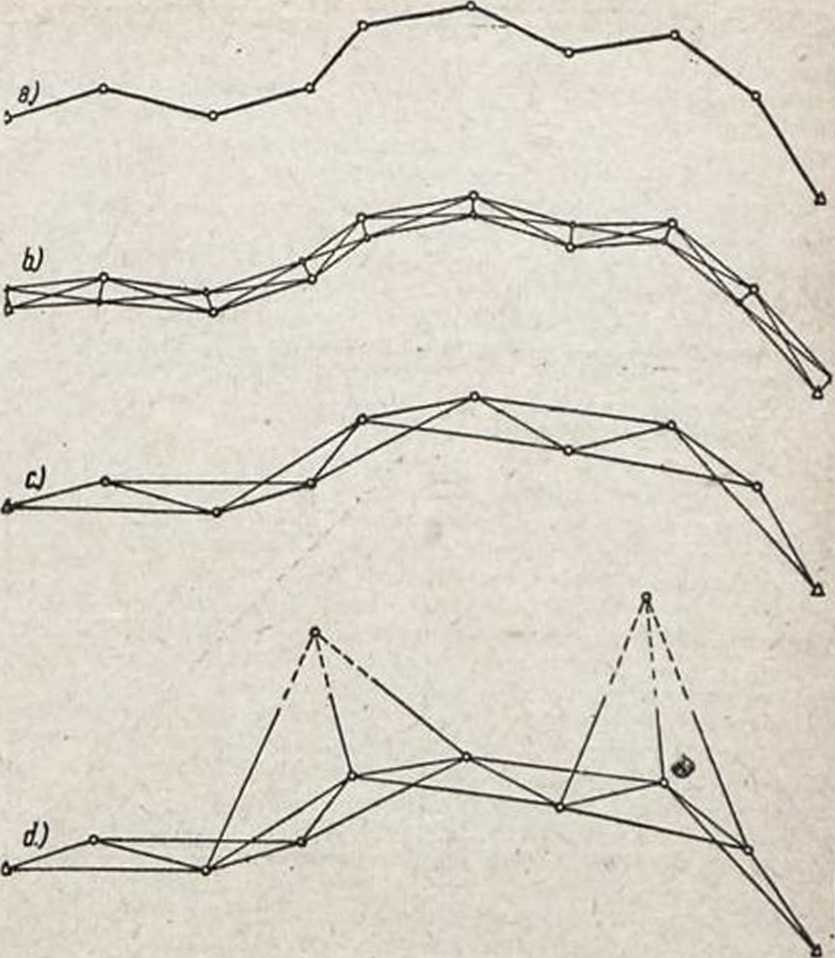
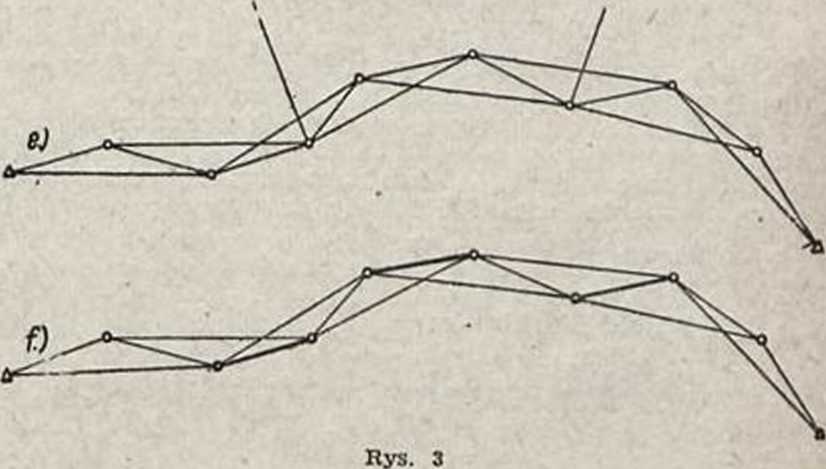
niami bocznymi*). Istotę tej koncepcji ukazuje rysunek 3.
Na rysunku 3 pokazane jest zastąpienie nawiązanego obustronnie ciągu poligonowego (3*) łańcuchem czworoboków lub trójkątów (3&.c). Rysunek (3d.e.f) pokazuje spo-
i
Rys. 4
W tej sytuacji celowe wydaje się zaproponowanie stosowania konstrukcji mieszanych, których zasadniczym ele mentem byłyby łańcuchy trójkątów obustronnie nawiąza nych, wzmocnionych na poszczególnych odcinkach w zależ ności od możliwości terenowych: punktami oporowymi, po mia-rem niektórych długości boków trójkątów (pewna modyfikacja metody smukłych trójkątów) lub też nawiąza soby wzmocnienia łańcucha trójkątów: pojedynczymi punktami oporowymi (3d), dodatkowym zaobserwowaniem kierunków do położonych w bok od trasy łańcucha punktów triangulacyjnych (3e), czyli tak zwanych nawiązań bocz-
r) Jerzy Gaźdzlcki „Wpływ nawiązań kątowych na zmniejszanie błędów poołu/nych punktów typowego ciągu poligonowego". Prace IGiK, Tom III, zeszyt 1/8 r. 1956.
429
Wyszukiwarka
Podobne podstrony:
NYCZ18 nej, ale także twórczej. W nawiązaniu do Simmla można by ją nazwać strategią obcego, gdyż łąc
Do tego można by jeszcze dorzucić stresujący tryb życia i ciężką pracę. Jednak uważać to można z inn
22 ARTYKUŁY tekarzy. Nie ma więc tradycji, do których można by nawiązać. Zwłaszcza że wiele zmieniło
Obraz 3 (7) O poezji naiwnej i sentymentalnej 415 su i przebiega wedle praw empirycznych. Natomiast
zawieszony. W tym wypadku nie można mówić o transparentnej transakcji, kule można by tu raczej porów
IMGW20 29 Hpwych (pomiar wykonany po usunięciu ok. 20 nm) - spada do 2% at. Podobnie Kk w przypadku
skanuj0037 (20) Koła łańcuchowe wg PN-73/M-84161 do łańcuchów napędowych-rolkowych 24B-1, -2, -3 (1
kat C 66 PODRĘCZNIK KATEGORIA C Pojazd zarejestrowany za granicą dopuszcza się do ruchu, jeżeli odpo
więcej podobnych podstron