4962384756
System ParkSafe wykorzystuje automatyczne systemy sterowania z jednym środkowym przenośnikiem, który transportuje oraz rozmieszcza pojazdy na regalach, które znajdują się po obu stronach przenośnika (rys./fot. 2.4). Powierzchnia potrzebna do wybudowania takiego parkingu jest bardzo mała, a ilość samochodów mieszczących się na parkingu to nawet 100 pojazdów. Indywidualne rozwiązania konstrukcyjne zapewniają różnorodność systemu, dzięki takiej koncepcji system może być wykonany w wielu wariantach, np. kombinacja wieża, szyb oraz wieża/szyb; lokalizacja wjazdu może znajdować się na dowolnym poziomie.
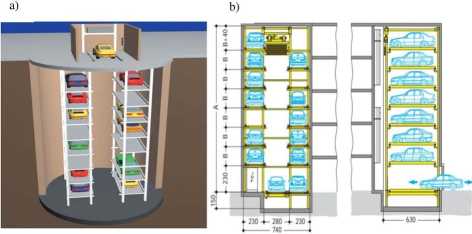
Rys. 2.4 a) System ParkSafe, b) Schemat systemu ParkSafe [26]
Użytkownik chcąc zaparkować pojazd odczytuje informację wysyłaną przez sterownik o możliwości parkowania bądź jej braku z wyświetlacza. Informacja ta uzyskiwana jest dzięki czujnikom kontrolującym stan zajętości miejsc postojowych. Wysyłają one sygnał do sterownika o możliwości składowania pojazdu bądź jej braku. Kierowca pozostawiając pojazd w pomieszczeniu wjazdowym włącza na panelu sterowania odpowiedni przycisk sygnalizujący opuszczenie pomieszczenia i pozostawienie pojazdu w terminalu wjazdowym. Odbierane sygnały z czujników i fotokomórek przesyłane są do zaprogramowanego sterownika, który steruje urządzeniami wykonawczymi. Po sczytaniu odpowiednich parametrów przez sensory wysiana jest informacja o prawidłowości działania systemu. Po otrzymaniu takiej informacji sterownik zezwala na wykonanie ruchów roboczych. System rozpoczyna proces automatycznego składowania. Urządzenie pobiera pojazd z pomieszczenia wjazdowego, a następnie wykonując ruch pionowy umieszcza go na platformie postojowej. Po zakończeniu procesu składowania przenośnik wraca na pozycję początkową. Proces odebrania pojazdu realizowany jest w bardzo podobny sposób. Użytkownik chcąc odebrać pojazd wciska odpowiedni przycisk na panelu sterowania. Po odebraniu sygnału z panelu sterowania zbieranych jest szereg informacji z czujników i fotokomórek, za pomocą których, wysyłane są sygnały do sterownika. W przypadku braku wystąpienia nieprawidłowości sterownik umożliwia wykonywanie poszczególnych ruchów. Podnośnik odbiera pojazd z platformy i transportuje go do pomieszczenia wjazdowego (użytkownik wówczas może bezpiecznie odebrać pojazd).
12
Wyszukiwarka
Podobne podstrony:
Cyfrowe systemy sterujące Cyfrowy system automatyki (CSA), Komputerowy system sterowania (KSS), Komp
22) Automatyzacja procesów odlewania; systemy sterowania i wizualizacji - wykład 8 godz.; ćwiczenia
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W 1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W 1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W 1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
50 (180) OBSŁUGA OBSŁUGA4-biegowa skrzynia automatyczna Programy jazdy System sterowania automatyczn
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W 1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W 1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W_1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
W 1 Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu automatyki. Zarys history
Systemy E/E/PE - sterowania i automatyki zabezpieczeniowej System sterowania i system automatyki
EGZAMIN DYPLOMOWY VII semestr Automatyka i Systemy Sterowania Gdańsk 2012
więcej podobnych podstron