5217956936
175
Symulacyjne i eksperymentalne badania adaptacyjnego sterowania tłumieniem zawieszenia w zależności od częstotliwości sinusoidalnego wymuszenia kinematycznego
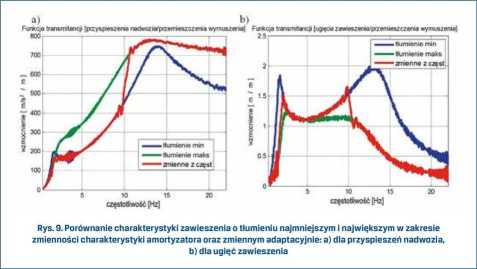
Z powodu położenia punktów niezmienności charakterystyk wzmocnienia od tłumienia dla innych zmiennych - w innych częstotliwościach, dla pozostałych funkcji osiągnięto wynik tylko częściowo minimalizujący przebieg funkcji wzmocnienia. Zaprezentowano to na rys. 9 dla funkcji wzmocnienia przyspieszeń nadwozia i ugięć zawieszenia.
5. Badania stanowiskowe strategii adaptacyjnej dla częstotliwości
Przedstawiony algorytm sterowania przebadano także w formie prototypu sterownika amortyzatora o zmiennym tłumieniu we współpracy z fizycznym modelem zawieszenia ćwiartki samochodu, przedstawionym na rys. lO.a Na rysunku 10.b przedstawiono wynik detekcji amplitudy i częstotliwości dla sygnału testowego podczas badań stanowiskowych oraz ich prezentację on-line - częstotliwości i amplitudy wymuszenia.
W badaniach eksperymentalnych testowano także płynną zmianę poziomu tłumienia pomiędzy wartością najmniejszą i największą, co jednak wykazało mniejszą efektywność poprawy komfortu i bezpieczeństwa. Objawiło się to opóźnionym spadkiem wartości funkcji wzmocnienia dla niskich częstotliwości, widocznym na rys. 11.
W badaniach eksperymentalnych pojawiły się zakłócenia pomiaru przyspieszeń, wywołane ruchami poprzecznymi stanowiska w fazie przechodzenia przez rezonans masy nie-resorowanej. Wskutek tego dla częstotliwości rezonansu tej masy wystąpił problem z odzwierciedleniem charakterystyki wzmocnienia przyspieszeń nadwozia, co przedstawiono na rys. 11.b. Jednak wyraźnie potwierdzono wpływ zmiany tłumienia w fazie rezonansu
Wyszukiwarka
Podobne podstrony:
177 Symulacyjne i eksperymentalne badania adaptacyjnego sterowania tłumieniem zawieszenia w zależnoś
167 Symulacyjne i eksperymentalne badania adaptacyjnego sterowania tłumieniem zawieszenia w zależnoś
169 Symulacyjne i eksperymentalne badania adaptacyjnego sterowania tłumieniem zawieszenia w zależnoś
171 Symulacyjne i eksperymentalne badania adaptacyjnego sterowania tłumieniem zawieszenia w zależnoś
173 Symulacyjne i eksperymentalne badania adaptacyjnego sterowania tłumieniem zawieszenia w zależnoś
SYMULACYJNE I EKSPERYMENTALNE BADANIA ADAPTACYJNEGO STEROWANIA TŁUMIENIEM ZAWIESZENIA W
73624 WP 140404�8 B. Badanie kątowej zdolności rozdzielę/ >ka w zależności od odlegleasm I. Prz
Ściąga ekspertaQClU Prędkość tego obrotu jest różna w zależności od szerokości geograficznej. Na
Modelowanie i symulacje komputerowe w mechaniceKlasyfikacja zagadnień Ze względu na zależność od
img114 2 9. Specjalne metody badania niektórych półproduktów i wyrobów gotowych W zależności od rodz
FunkcjonowanieRynku R09 0 271 — zmieniające się zdolności adaptacyjne lub kreatywn
BadaniaMarketKaczmarczyk 0 4.6.4Metody symulacyjne Eksperyment dotyczący realnych produktów, realny
IMGi11 (2) - pozbawianie samodzielnego dokonywania odkryć, eksperymentowania, bada
10 Karol Przanowski: Rola danych 195 symulacyjnych uj badaniach Credit Scoring I I
Projekty badawcze 17. Równoległe algorytmy automatycznej hp adaptacji sterowane gramatyką
więcej podobnych podstron