9679385208
4 Poniewiera M„ Pomykoł M.. Poniewiera A.
W celu uniknięcia grubego błędu opracowano program, który na bieżąco oblicza współczynniki transformacji i umożliwia szybkie usunięcie błędnego punktu. W związku z tym, że nie zawsze błędny punkt ma największy błąd transformacji, zastosowano tu takie postępowanie, że program oblicza szereg wariantów obliczeń, kolejno wykluczając poszczególne punkty. Dla niewielkiej ilości, kilku - kilkudziesięciu punktów takie postępowanie dobrze sprawdza się w praktyce.
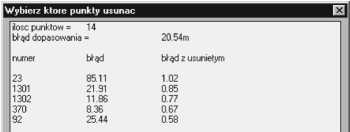
Rys. 1 Kontrola punktów dopasowania.
Fig. 1 Check of control points.
Mając kilka punktów dopasowania dokonujemy przybliżonego wpasowania mapy. Mając dwie mapy nałożone na siebie bez trudu możemy znaleźć większą ilość punktów dla bardziej dokładnej transformacji.
3.2 Transformacja mapy.
Mając punkty dostosowania przystępujemy do obliczenia współczynników transformacji. Zgodnie z tym co zostało powiedziane w punkcie 2, zadowalające wyniki daje użycie wielomianu zespolonego, o stopniu dostosowanym do wielkości zniekształceń.
Z = ao + ai • z + a2 ■ z2+ ... + an- z" = ao + z (ai + z (a2 + z (a3... + z • an))
(3.2-1)
gdzie:
z = (x , y) oznacza argument zespolony (parę liczb)
Następnie przystępujemy do transformacji mapy, co polega na przetworzeniu każdego obiektu mapy z osobna. Wszystkie punkty mapy dostają nowe współrzędne zgodnie z wzorem Obiekty punktowe dodatkowo zostają obrócone i przeskalowane.
Wyszukiwarka
Podobne podstrony:
9_ Poniewiera M„ Pomykoł M.. Poniewiera A. 4.4 Zapisanie oraz odczytanie bieżącej konfiguracji. Prog
4 (295) W celu uniknięcia błędu nieliniowości, jak również wpływu temperatury (niewielkiego) na dokł
skanuj0412 Ponieważ wektor (S — S0)M pojawia się we wszystkich wyrażeniach na przesunięcia fazowe, n
SS854631 6BBBBi B Ponieważ macierz mas jest symetryczna to zamiana wierszy na kolu
page0103 99 środka; a ponieważ cząstki, z których ów środek powstał, także padały na niego skośnie,
1535051f7540149969097?3953255 n 7. Statek mający pierwszeństwo drogi powinien: A) podjąć działanie w
HPIM4446 łcących i I roku studiów wyższych uczelni. Ponieważ znaczenie tej informacji stanowi pochod
W celu uniknięcia wzmiankowanych sytuacji, przed rozpoczęciem śluzowania, usuwa się fragment ugiętyc
206 A. PRZYKORSKA [9] ponieważ nie znaleziono niesparowanych zasad w kołowym DNA, który został
photo21 Nie należy dokonywać zmiany świateł przy wysokich obrotach silnika w celu uniknięcia przepal
• W celu uniknięcia naruszenia stateczności fundamentu budynku, przewody
78406 OMiUP t1 Gorski66 Ponieważ: Po < Rg " rS > Rd “ ciśnienie końcowe na promieniu jest
więcej podobnych podstron