Instytut Automatyzacji procesów Technologicznych
i Zintegrowanych Systemów Wytwarzania
Wydział Mechaniczny Technologiczny
Politechnika Śląska w Gliwicach
PODSTAWY STEROWANIA ROBOTÓW I MASZYN
Projekt
PROSTE ZADANIE KINEMATYKI
Grzegorz Ozimek, grupa 3, semestr 1
Kierunek: Automatyka i robotyka
I
Wstęp teoretyczny
Kinematyka manipulatora.
Proste zadanie kinematyki jest to zadanie statyczno-geometryczne polegające na obliczeniu pozycji i orientacji członu roboczego manipulatora. Mając dane wszystkie współrzędne konfiguracyjne należy obliczyć pozycję danego punktu związanego z robotem (przede wszystkim chwytaka) względem globalnego układu współrzędnych. Zadanie to traktowane jest jako zadanie odwzorowania opisu położenia manipulatora w przestrzeni współrzędnych konfiguracyjnych na opis w przestrzeni współrzędnych kartezjańskiej.
Wyprowadzenie przekształceń dla poszczególnych członów.
Zadaniem jest znalezienie przekształcenia, określającego układ {i} względem układu {i-1}. Na ogół przekształcenie to będzie funkcją czterech parametrów członu. Dla każdego danego robota przekształcenie to będzie funkcją tylko jednej zmiennej, pozostałe trzy parametry są ustalone i wynikają z konstrukcji mechanicznej. Określając układ odniesienia dla każdego członu dokonano podziału zadania kinematyki na n podzadań. W celu rozwiązania każdego z tych podzadań, przykładowo i-1Ti , podzielono każde z nich na cztery pod-zadania. Każde z tych czterech przekształceń będzie funkcją tylko jednego parametru członu i będzie na tyle proste, że będzie można napisać jego postać przez sprawdzenie.
Zastosujemy cztery, kolejne przekształcenia, mianowicie:
Obrót wokół osi Zi-1 o kąt θi,
Przesunięcie wzdłuż osi Zi-1 o wielkość λi,
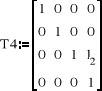
Przesunięcie wzdłuż osi Zi o wielkość li,
Obrót wokół osi Xi o kąt αi.
Macierz przekształcenia Ai:
Macierz Ai opisuje przejście z układu {i-1} do kolejnego układu { i }, a więc:
Ai = i-1Ti
zgodnie z notacją Hartenberga-Denavita, kolejnymi przekształceniami jakie wykonuje się przy przejściu z układu {i-1} do { i } są:
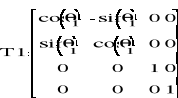
• obrót wokół osi zi-1 o kąt θi zatem: |
|
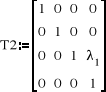
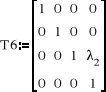
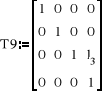
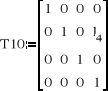
• przesunięcie wzdłuż osi zi-1 o λi (identyczne przekształcenie jest dla przesunięcia wzdłuż osi zi-1 o li): |
|
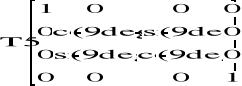
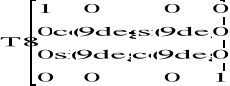
• obrót wokół osi xi o kąt αi: |
|
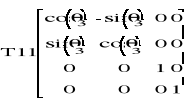
Przekształcenie Ai będzie wyglądało, więc tak:
Ai = Rot(zi-1, θi)Trans(0,0,λi)Trans(li,0,0)Rot(xi,αi),
a macierz Ai będzie miała taką postać ogólną :
Parametrami Hartenberga-Denavita są zatem:
θi, λi, li, αi
przy czym:
θi = zmienna konfiguracyjna dla pary obrotowej,
λi = zmienna konfiguracyjna dla pary przesuwnej,
li = const; αi = const.
θi dla pary przesuwnej przyjmuje wartości stałe, a dla pary obrotowej λi = const.
II
Dane do zadania
θ1 = -60 [*]
θ2 = 30 [*]
θ3 = 60 [*]
d1 = λ1 = 2.5 [m]
d2 = λ2 = 1 [m]
l1 = 0.65 [m]
l2 = 0.5 [m]
l3 = 0.3 [m]
l4 = 0.75 [m]
Schemat manipulatora wraz z globalnym, oraz lokalnymi układami współrzędnych:
III
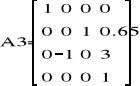
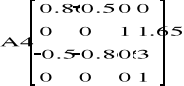
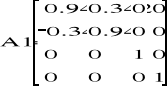
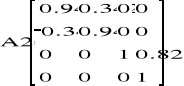
Wyznaczanie macierzy translacji oraz obliczenia
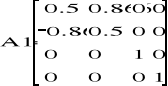
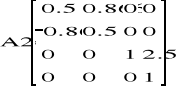
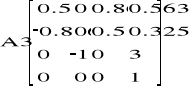
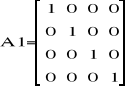
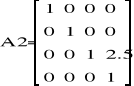
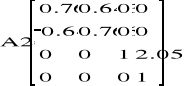
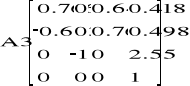
Obliczenia główne:
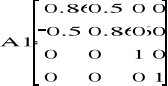
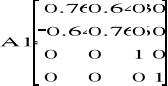
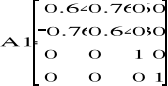
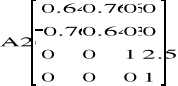
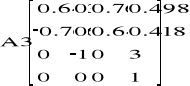
![]()
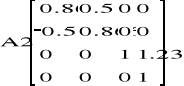
![]()

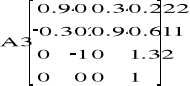
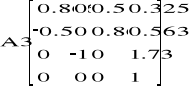
![]()

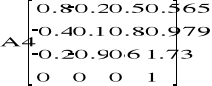
![]()
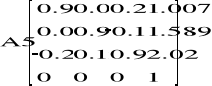
![]()
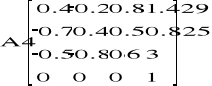
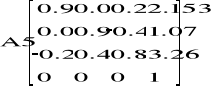
Zatem punkt kiści: A5(2.153 ; 1.07 ; 3.26).
Obliczenia dodatkowe dla 5 różnych zestawów wartości:
1)
θ1 = 0 [*]
θ2 = 30 [*]
θ3 = 60 [*]
d1 = λ1 = 2.5 [m]
d2 = λ2 = 1 [m]
l1 = 0.65 [m]
l2 = 0.5 [m]
l3 = 0.3 [m]
l4 = 0.75 [m]

Zatem punkt kiści: A5(0.15 ; 2.4 ; 3.26).
2)
θ1 = -20 [*]
θ2 = 10 [*]
θ3 = 20 [*]
λ1 = 0.82 [m]
λ2 = 0.32 [m]
l1 = 0.65 [m]
l2 = 0.5 [m]
l3 = 0.3 [m]
l4 = 0.75 [m]

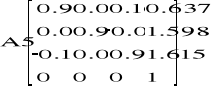
Zatem punkt kiści: A5(0.637 ; 1.598 ; 1.615).
3)
θ1 = -30 [*]
θ2 = 15 [*]
θ3 = 30 [*]
λ1 = 1.23 [m]
λ2 = 0.48 [m]
l1 = 0.65 [m]
l2 = 0.5 [m]
l3 = 0.3 [m]
l4 = 0.75 [m]
Zatem punkt kiści: A5(1.007 ; 1.589 ; 2.02).
4)
θ1 = -40 [*]
θ2 = 20 [*]
θ3 = 40 [*]
λ1 = 2.05 [m]
λ2 = 0.8 [m]
l1 = 0.65 [m]
l2 = 0.5 [m]
l3 = 0.3 [m]
l4 = 0.75 [m]
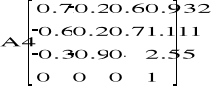
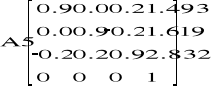
Zatem punkt kiści: A5(1.493 ; 1.619 ; 2.832).
5)
θ1 = -50 [*]
θ2 = 25 [*]
θ3 = 50 [*]
λ1 = 2.5 [m]
λ2 = 1 [m]
l1 = 0.65 [m]
l2 = 0.5 [m]
l3 = 0.3 [m]
l4 = 0.75 [m]

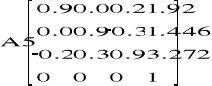
Zatem punkt kiści: A5(1.92 ; 1.446 ; 3.272).
IV
Wnioski
Sensem zadania prostego kinematyki manipulatora jest znalezienie macierzy X, która odpowiada za przekształcenie układu {0} - związanego z nieruchomą podstawą manipulatora, w układ {n+1} - związanego z chwytakiem (narzędziem, kiścią) ostatniego ramienia w łańcuchu.
Zatem dzięki prostemu zadaniu kinematyki można w miarę prosty sposób wyznaczyć położenie ostatniego członu manipulatora robota (kiść - oprzyrządowanie technologiczne robota), a także wszystkich pośrednich par kinematycznych. Metoda ta jest bardzo prosta, a zarazem efektywna.
Wyszukiwarka
Podobne podstrony:
Automatyzacja procesów technologicznych
Automatyzacja projektowania procesów technologicznych, Materiały
projektowanie procesów technologicznych F
karta ins3, Politechnika Poznańska (PP), Projektowanie procesów technologicznych, Projekt, Projekt t
Projektowanie Procesów Technologicznych (2)
projektowanie procesow technologicznych
Projekt procesow technologicznych zakres egzamin
Ściaga PPT pytania, Zarządzanie i inżynieria produkcji, Semestr 8, Projektowanie procesów technologi
PROJEKTOWANIE PROCESU TECHNOLOGICZNEGO ELEMENTU FREZOWANEGO SIŁOWNIKA
PROJEKTOWANIE PROCESU TECHNOLOGICZNEGO ELEMENTU FREZOWANEGO SIŁOWNIKA
Projektowanie procesów technologicznych dla części klasy
Feld M Podstawy projektowania procesów technologicznych typowych części maszyn
Projekt nr 1, Inżynierskie, Semestr IV, Podstawy procesów technologicznych
Karta Technologiczna (wydruk do uzupelnienia), Projektowanie procesów technologicznych
HDPE, Projektowanie procesów technologicznych
więcej podobnych podstron