2013-12-01
Podstawy automatyki -
ćwiczenia
1
Charakterystyki
czestotliwościowe
Podstawy automatyki
2013-12-01
Podstawy automatyki -
ćwiczenia
2
Charakterystyka częstotliwościowa:
x(t)=A
1
sin
ωt
y(t)=A
2
sin (
ωt + φ)
Jest to przebieg odpowiedzi
y(t)=A2sin (
ωt + φ)
układu dynamicznego
na podane na jego wejście wymuszenie
x(t)=A1sin
ωt
.
Zmienną niezależną jest pulsacja –
ω
Charakterystyki częstotliwościowe określają zachowanie się obiektu
dynamicznego w stanach ustalonych przy wymuszeniach harmonicznych
(sinusoidalnych).
2013-12-01
Podstawy automatyki -
ćwiczenia
3
Charakterystyki częstotliwościowe:
Transmitancja widmowa
)
(
)
(
j
s
s
G
j
G
G(j
)
x(
t
)=A
1
sin
t
y(
t
)=A
2
sin(
t+
j
)
]
[sin
)]
[sin(
t
L
e
t
L
s
j
j
Zgodnie z tw. o przesunięciu w dziedzinie zmiennej rzeczywistej:
2013-12-01
Podstawy automatyki -
ćwiczenia
4
Charakterystyki częstotliwościowe:
Transmitancję operatorową układu automatyki można zapisać:
sin
)
sin(
1
2
t
A
L
t
A
L
s
G
j
sin
)
sin(
1
2
t
L
t
L
A
A
j
s
e
A
A
j
1
2
t
L
t
L
e
A
A
s
sin
sin
1
2
j
2013-12-01
Podstawy automatyki -
ćwiczenia
5
Charakterystyki częstotliwościowe:
j
j
s
s
e
A
A
j
G
1
2
)
(
Zgodnie z def. tr. widmowej:
j
j
e
A
A
1
2
j
j
e
A
gdzie:
A
– moduł transmitancji
φ
– przesunięcie fazowe
(argument)
są funkcjami częstotliwości
2013-12-01
Podstawy automatyki -
ćwiczenia
6
Charakterystyki częstotliwościowe:
Transmitancja widmowa
jest więc
liczbą zespoloną
,
której moduł
A(
ω
)
jest równy stosunkowi amplitud
sinusoidalnego sygnału wyjściowego i wejściowego:
)
(
j
G
)
(
A
1
2
A
A
j
j
e
A
A
1
2
a argumentem
φ
(
j
ω
)
jest przesunięcie fazowe sygnału
wyjściowego względem wejściowego:
)
(
j
)
(
arg
j
G
j
j
e
A
A
1
2
arg
2013-12-01
Podstawy automatyki -
ćwiczenia
7
Charakterystyki częstotliwościowe:
2013-12-01
Podstawy automatyki -
ćwiczenia
8
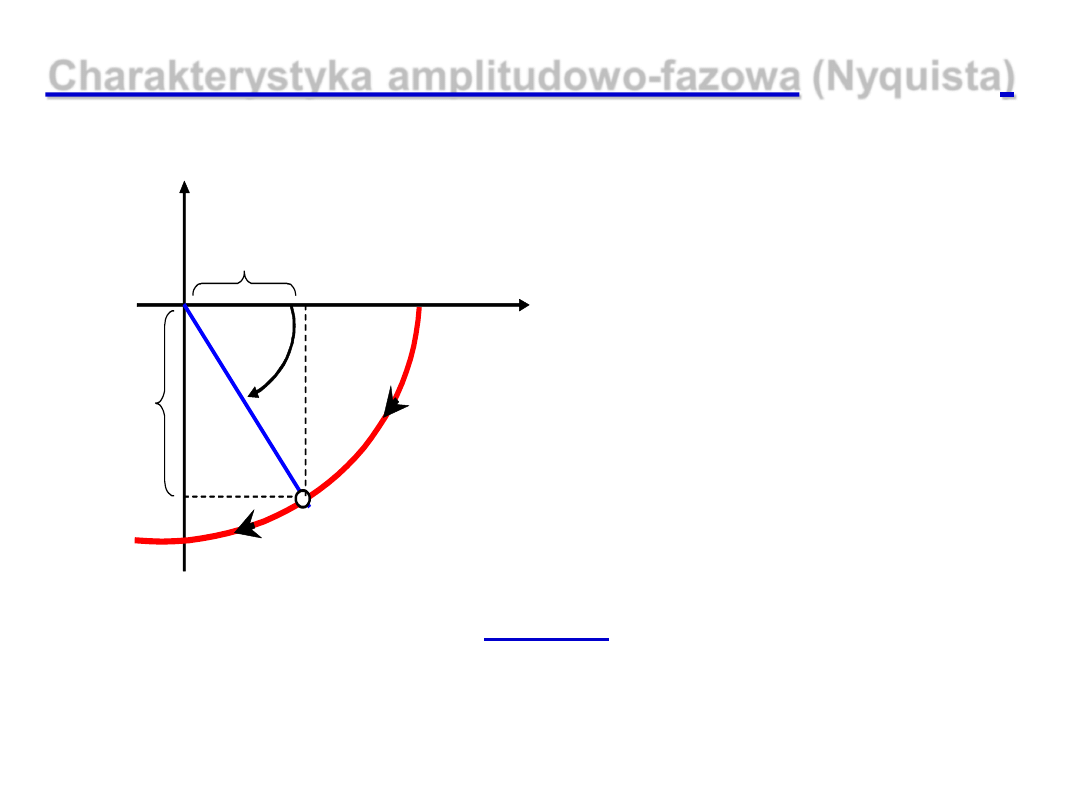
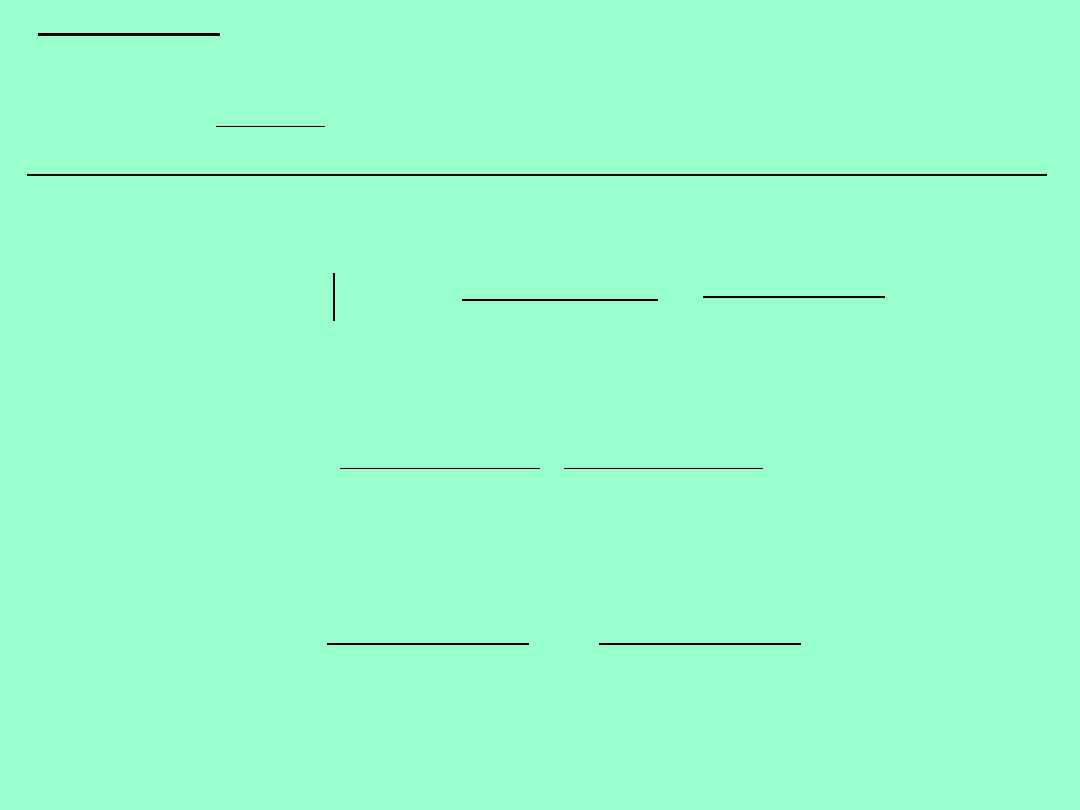
Charakterystyka amplitudowo-fazowa (Nyquista)
Im G (j
)
R e G (j
)
0
i
j
(
i
)
A (
i
)
0
P (
)
Q (
)
Ch-ka A-F
– miejsce
geometryczne punktów, jakie
zakreśla wektor G(
j
ω)
, na
płaszczyźnie zespolonej przy
zmianie częstotliwości
(pulsacji) sygnału wejściowego
od
0
do
UWAGA:
Ch-ka A-F
określa zachowanie się elementu lub układu przy
wszystkich
częstotliwościach sygnału wejściowego.
2013-12-01
Podstawy automatyki -
ćwiczenia
9
Charakterystyki częstotliwościowe:
Korzystając z tw. Eulera dla liczb zespolonych:
j
j
j
sin
cos
j
e
j
transmitancję widmową można zapisać jako:
)
(
j
G
j
j
Ae
)
sin
(cos
j
j
j
A
co daje:
)
(
)
(
)
(
Q
j
P
j
G
gdzie:
)
(
P
)}
(
Re{
j
G
)]
(
cos[
)
(
j
A
)
(
Q
)}
(
Im{
j
G
)]
(
sin[
)
(
j
A
2013-12-01
Podstawy automatyki -
ćwiczenia
10
Charakterystyki częstotliwościowe:
- na podstawie rysunku (ch-ka A-F) mamy:
Im G (j
)
R e G (j
)
0
i
j
(
i
)
A (
i
)
0
P (
)
Q (
)
)
(
j
G
)
(
A
)
(
)
(
2
2
Q
P
)
(
j
)
(
arg
j
G
)
(
)
(
P
Q
tg
arc
2013-12-01
Podstawy automatyki -
ćwiczenia
11
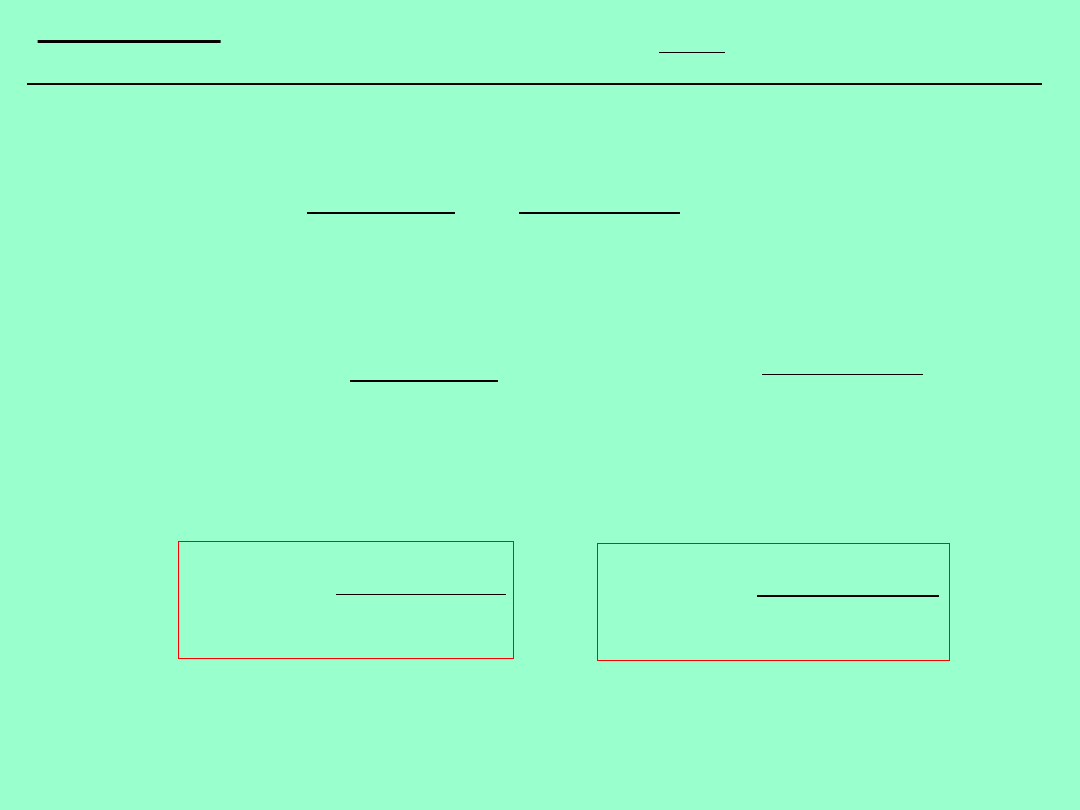
Inne charakterystyki częstotliwościowe
2.
A(
ω)
– charakterystyka amplitudowa
3.
φ(ω)
– charakterystyka fazowa
oraz
charakterystyki logarytmiczne
(oś odciętych ma podziałkę
logarytmiczną – log
ω )
:
4.
L(
ω)
– logarytmiczna charakterystyka amplitudowa
5.
φ(ω)
– charakterystyka fazowa
[dB]
)
(
log
20
)
(
A
L
2013-12-01
Podstawy automatyki -
ćwiczenia
12
Jak wyznaczać ch-ki częstotliwościowe ?
• kreślimy odpowiednie ch- ki
1)
Układ opisany równaniem różniczkowym:
• dokonujemy przekształcenia Laplace’a r. różniczkowego;
• i wyznaczamy –
G(s)
• korzystając z def. transmitancji widmowej wyznaczamy:
j
s
s
G
j
G
)
(
)
(
• mnożymy i dzielimy G(j
ω
) przez liczb
ę sprzężoną
2)
Układ opisany transmitancją operatorową
G(s)
• doprowadzamy do wyznaczenia części Re{G(jω)} i Im{G(jω)}
jb
a
z
jb
a
z
2013-12-01
Podstawy automatyki -
ćwiczenia
13
Przykład (1/3):
Wyznaczyć ch-kę A-F układu o transmitancji operatorowej:
1
Ts
s
k
s
G
gdzie: k=20 T=0,1 s
1
Tj
j
k
Rozwiązanie:
j
T
k
2
j
G
j
s
s
G
)
(
j
T
j
T
j
T
k
j
G
2
2
2
2
2
4
2
2
4
2
T
k
j
T
T
k
2013-12-01
Podstawy automatyki -
ćwiczenia
14
Przykład (2/3):
Wyznaczyć ch-kę A-F układu o transmitancji operatorowej:
1
Ts
s
k
s
G
gdzie: k=20 T=0,1 s
Rozwiązanie c.d.:
2
3
2
2
1
T
k
j
T
kT
stąd
1
2
2
T
kT
P
2
3
T
k
Q
po podstawieniu danych liczbowych:
1
01
,
0
2
2
P
3
01
,
0
20
Q
2013-12-01
Podstawy automatyki -
ćwiczenia
15
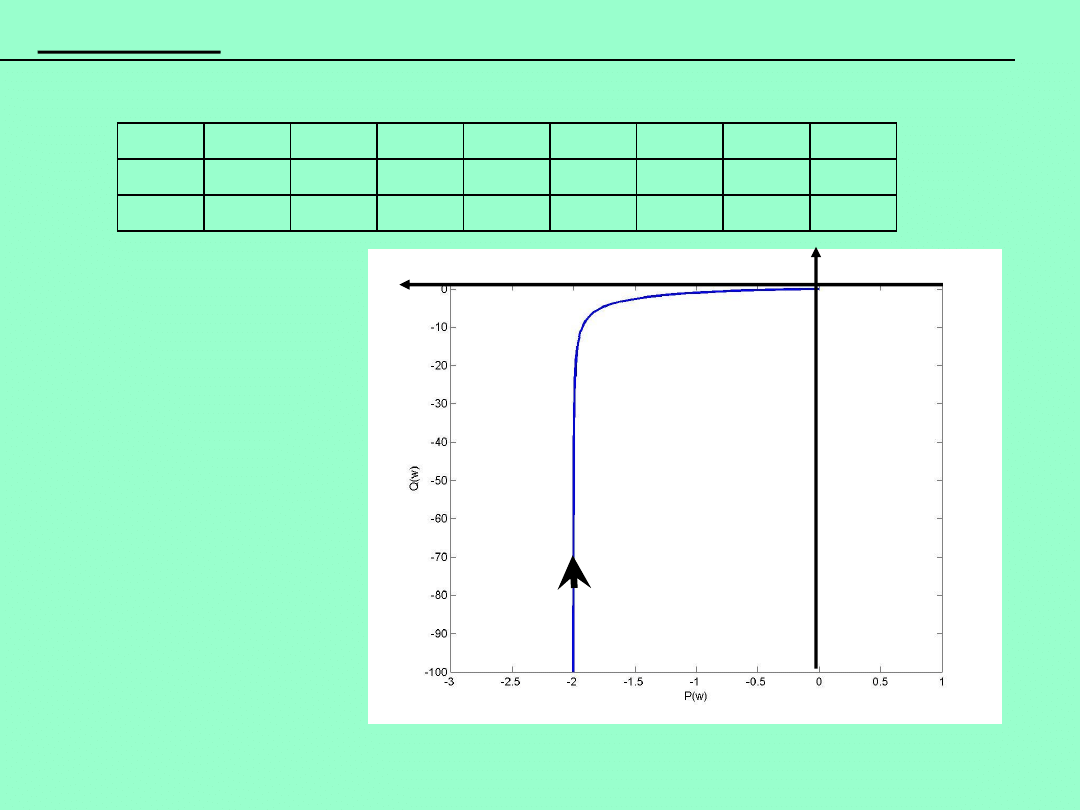
Przykład (3/3):
Rozwiązanie c.d.:
otrzymujemy wykres:
0
0,5
1
5
10
20
50
∞
P(
)
-2
-1,995
-1,98
-1,6
-1
-0,4
-0,077
0
Q(
)
-∞
-39,9
-19,8
-3,2
-1
-0,2
-0,015
0
Wyliczając wartości w tabeli:
Wyszukiwarka
Podobne podstrony:
Charakterystyki czasowe JG
Ćw 11 Czwórniki bierne charakterystyki częstotliwościowedocx
Charakterystyki czestotliwosciowe
Charakterystyki czestosciowe
Cw Charakterystyki częstotliwościowe, Semestr III PK, Semestr Zimowy 2012-2013 (III), Automatyka, Au
Miernictwo- Zdejmowanie charakterystyk częstotliwościowych przebiegów odkształconych, ?w._
Badanie częstotliwości i charakterystyk częstotliwościowych
Charakterystyki czestotliwosciowe
Charakterystyki częstotliwościowe podstawowych członów dynamicznych v4
Charakterystyki czestotliwosciowe
Charakterystyki czestotliwo ciowe wybranych elementow liniowych
05 Charakterystyki czestotliwoscio
PA5 charakterystyki czestotliwosciowe [tryb zgodności]
PROJEKT I?DANIE CZWÓRNIKÓW RC?LEM WYZNACZENIA NAPIĘCIOWEJ CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWEJ
05 Charakterystyki częstotliwościowe
druk, Poziom dźwięku A -poziom ciś akust skorygowanego wg charakterystyki częstotliwościowej A
Cw 4 Czworniki bierne charakterystyki czestotliwoscio
więcej podobnych podstron