
S
TEROWANIE
R
OBOTAMI
C
WICZENIA
L
ABORATORYJNE NR
5
M
IEJSCA GEOMETRYCZNE PIERWIASTKÓW
Akademia Górniczo – Hutnicza w Krakowie

Laboratorium nr 5 – miejsca geometryczne pierwiastków
Cwiczenia – czesc pierwsza
Cwiczenie 1
a.
Wykresl MGP dla ukladu G(s) = (3s - 4) / (s
2
- 2s + 2).
b. Wykresl MGP dla ukladu G(s) = -(3s - 4) / (s
2
- 2s + 2).
c.
Czy istnieje taka wartosc k , dla której jeden z powyzszych ukladów bedzie stabilny?
Cwiczenie 2
a.
Wykresl MGP dla ukladu G(s) = 1 /s(s + 1) (s
2
+ as + 4), gdzie a zmienia sie od 0,01 do 4,0
b. Sprawdz czy mozna znalezc dokladna wartosc a, dla której dwa niestabilne bieguny ustabilizuja sie.
Cwiczenie 3
a.
Wykresl MGP dla ukladu G(s) = (s
2
+ s + a) / s (s + 1) (s
2
+ s + 1.25) (s
2
+ s + 4.25), gdzie a zmienia sie
od 1,25 do 4,25 z przyrostem 1.
b. Wykresl MGP dla ukladu :
G(s) = (s
2
+ s + 9.25) (s
2
+ 2s + 10) (s
2
+ 3s + 11.25) / s (s + 2) (s
2
+ 2s + 5) (s
2
+ 2s + 17).
Cwiczenia – czesc druga
Cwiczenie 4
Dany jest skrypt ssrloc.m
ssrloc.m
% ssrloc
% This illustrate s the use of rlocus with a system
% in state space form.
clf
a = [ -1.5 -13.5 -13.0 0
1 0 0 0
0 1 0 0
0 0 1 0];
b = [ 1; 0; 0; 0 ];
c = [ 0 0 0 1 ];
d = 0;
rlocus (a, b, c, d);
Projektanci ukladów automatyki zawsze daza do skasowania wplywu sprzezonych biegunów (rezonansowych)
umieszczajac w ich poblizu sprzezone zera. Poniewaz liczba zer nie moze byc wieksza niz liczba biegunów,
musza równiez dodac nowe bieguny o zblizonej czestosci wlasnej, ale wiekszym tlumieniu. Operacje taka
nazywa sie notch filter.
a.
Dodaj notch filter do ssrloc.m – umiesc zera dokladnie na biegunach rezonansowych, bieguny filtru niech
maja te sama czestotliwosc, ale pieciokrotnie wieksze tlumienie.
b. Powtóz czesc a ale umiesc zera nieco powyzej i na lewo od biegunów rezonansowych.
c.
Powtóz czesc a ale umiesc zera nieco ponizej i na lewo od biegunów rezonansowych.
d. Poniewaz w warunkach rzeczywistych znamy tylko przyblizone polozenie biegunów, podaj które polozenie
zer jest lepsze: z podpunktu b czy c?
Podpowiedz: odpowiedz zalezy od zapasu stabilnosci. Jaka zmiana spowoduje utrate stabilnosci przez twój
uklad
Cwiczenie 5
Dany jest skrypt ukazujacy przyklad projektowania ukladów sterowania w oparciu o MGP
.rlocdesignex.m
% rlocdesignex
% An example of design by means of the root locus
clf
num = 1;
den = conv ( conv ( [ 1 0], [1 1] ), [ 0.2 1] );
rlocus (num, den);
v1 = 0.1; v2 = 2.5; h1 = 4; h2 = 0.1;
axis ( [-h1 h2 -v1 v2] ); damping=0.707;
wn = 1:1:4;
sgrid (damping, wn)
a.
Wykresl MGP ukladu danego w skrypcie z kompensatorem wyprzedzajacym z kompensujacym zerem w
punkcie –0,9. Pamietaj aby bieguny kompensatora znalazly sie 10 razy dalej na lewo niz zero.
b. Powtórz czesc a. ale umiesc zero kompensatora w punkcie –1.1. Który z kompensatorów jest lepszy.
c.
Wykresl MGP ukladu danego w skrypcie z kompensatorem opózniajacym. Jak polozenie biegunów
kompensatora wplywa na wyglad MGP.
d. Wykresl MGP dla ukladu plus wszystkie trzy kompensatory.
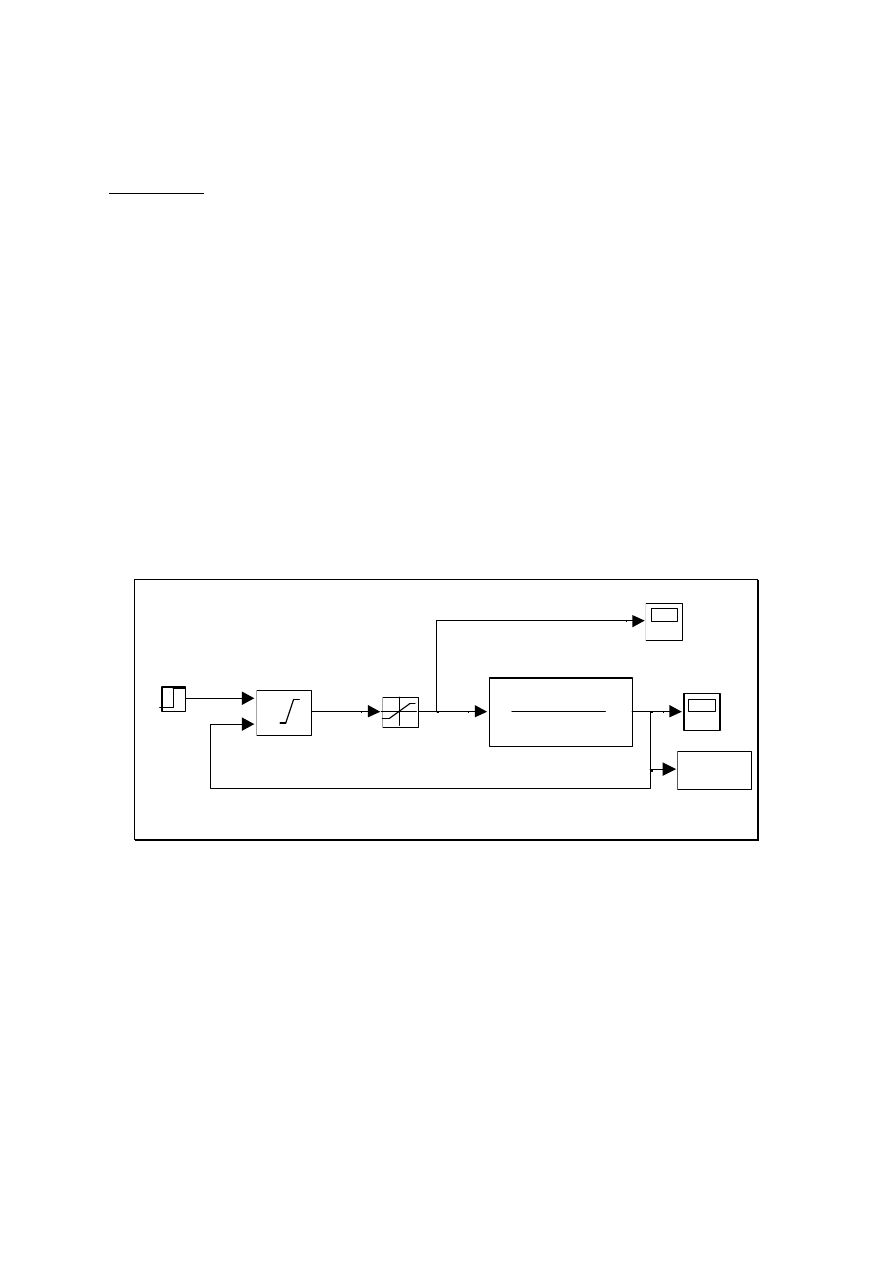
Cwiczenie 6
Zbuduj nastepujacy uklad w SIMULINKU
20
(s+.1)(s+2)(s+10)
Zero-Pole
y
To Workspace
Step Input
PID
Set point PID
with Anti-Windup
Scope
Scope
Saturation
Znajdz niezerowa wartosc Td, która poprawi odpowiedz powyzszego ukladu. Niewykluczone, ze konieczna
bedzie równiez korekta wartosci N.
Wyszukiwarka
Podobne podstrony:
MATLAB STEROWANIE ROBOTAMI, MATLABIK2
MATLAB STEROWANIE ROBOTAMI MATLABIK STEROWANIE
MATLAB STEROWANIE ROBOTAMI MATLABIK4
MATLAB STEROWANIE ROBOTAMI MATLABIK6
MATLAB STEROWANIE ROBOTAMI, MATLABIK3
MATLAB STEROWANIE ROBOTAMI, MATLABIK6
MATLAB STEROWANIE ROBOTAMI, MATLABIK STEROWANIE
MATLAB STEROWANIE ROBOTAMI, MATLABIK4
MATLAB STEROWANIE ROBOTAMI, MATLABIK7
MATLAB STEROWANIE ROBOTAMI, MATLABIK2
sterowanie robotami egzamin
Od modelu CAD do sterowania robotami frez 2
ZASTOSOWANIE BEZPRZEWODOWEJ SIECI INTERNET DO ZDALNEGO STEROWANIA ROBOTA
Matlab-kurs, Systemy sterowania, Systemy sterowania
Symulacja układów sterowania z wykorzystaniem pakietu MATLAB, PWr W9 Energetyka stopień inż, III Sem
Matlab cw1 2 zaoczni
cz 1, Matlab moj
Image Processing with Matlab 33
więcej podobnych podstron