
S
TEROWANIE
R
OBOTAMI
C
WICZENIA
L
ABORATORYJNE NR
6
C
HARAKTERYSTYKI CZESTOTLIWOSCIOWE
Akademia Górniczo – Hutnicza w Krakowie
Laboratorium nr 6 – Charakterystyki czestotliwosciowe
Cwiczenia – czesc pierwsza
Cwiczenie 1
Wykresl charakterystyke Nyquista dla ukladu G(s) = 1 / (s+20) (s + 0.001) (s+1). Powieksz obszar w poblizu
poczatku ukladu wspólrzednych. Wyswietl tylko obszar -0.003 = Re G(j?) = 0 i -0.0005= Im G(j?) = 0.0005.
Skad wiadomo, ze ten region bedzie interesujacy?
Cwiczenie 2
Narysuj charakterystyki Bodego, Nyquista i Nicholsa dla aproksymacji Padego 6 rzedu czlonu opózniajacego o
wartosci opóznienia 1 s. (uzyj pade)
Cwiczenie 3
Narysuj charakterystyke Nyquista ukladu o funkcji przejscia G(s) = 40 / s (s+4) (s+ 1 -6i)(s+ 1+61).
Uzyj S = -0.1, -0.001, -0.005, -0.0009 do przyblizenia bieguna s = 0. Powtórz zadanie wykreslajac
charakterystyki Bodego. Wyprowadz równania asymptot aby zinterpretowac otrzymane wyniki.
Cwiczenia – czesc druga
Cwiczenie 4
Powtórz cwiczenie 4 z cwiczen laboratoryjnych nr 4 – projektowanie ukladu regulacji przy pomocy filtru typu
notch Wykresl charakterystyki Bodego, Nicholsa i Nyquista dla danego ukladu wraz z filtrem. Wykresl
charakterystyki Bodego tylko dla funkcji przejscia filtru aby przekonac sie jaka jest geneza jego nazwy.
Cwiczenie 5
Stwórz kilka charakterystyk Nicholsa i Nyquista o ciekawych ksztaltach jak np. dla ukladu:
)
400
6
.
1
)(
10
)(
1
.
0
(
)
1
(
100
)
(
2
2
+
+
+
+
+
=
s
s
s
s
s
s
G
Cwiczenie 6
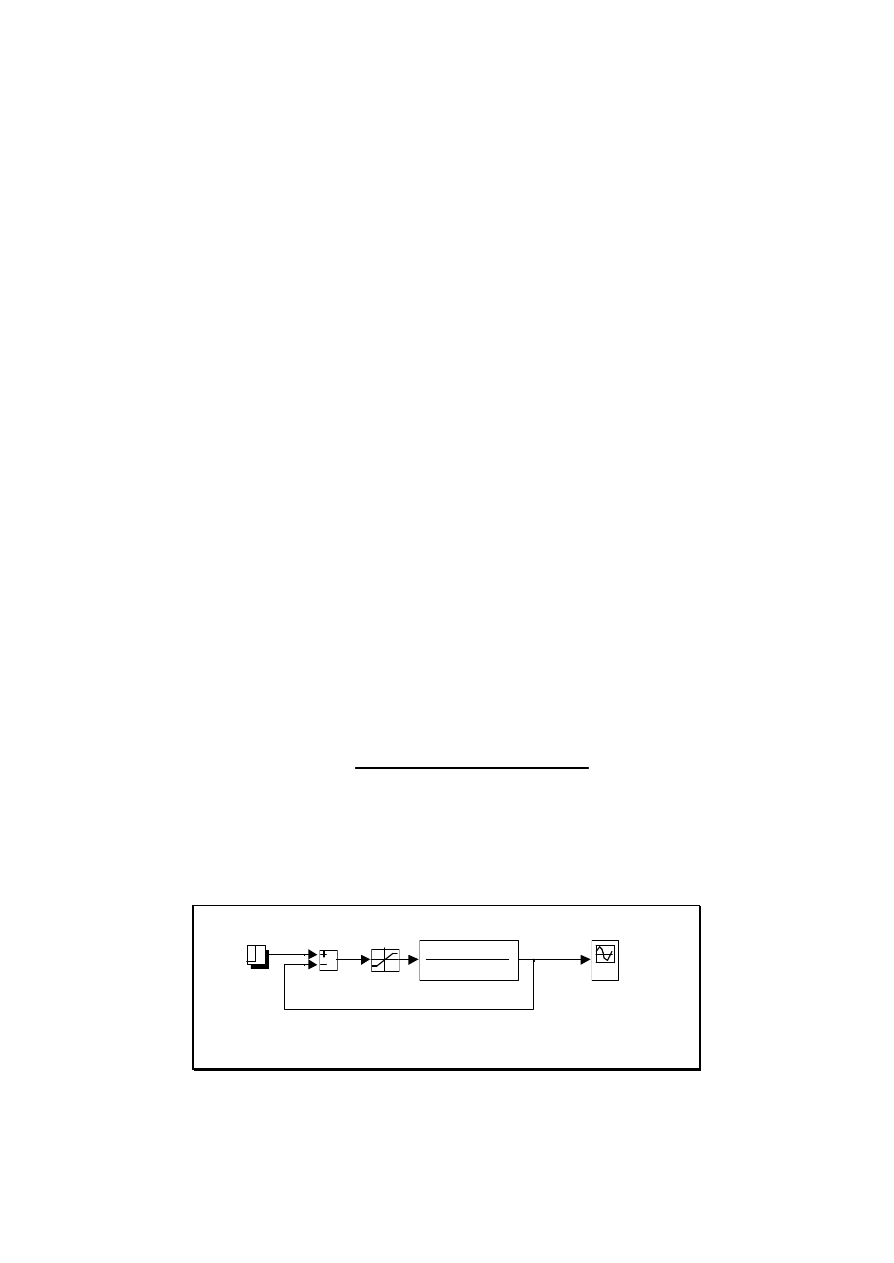
Dany jest uklad jak na schemacie:
10(s+10)(s+10)
(s+1)(s+.3+i)(s+.3-i)
Zero-Pole
Sum
Step Input
Saturation
Auto-Scale
Graph
Jest to uklad warunkowo stabilny tzn. jest stabilny tylko dla malych wzmocnien sygnalów wejsciowych.
Obejrzyj odpowiedz ukladu dla wartosci skoku k = 1 a nastepnie k = 10. Wykresl charakterystyki Bodego,
Nicholsa, Nyquista dla tego ukladu. Co mozesz powiedziec o charakterystykach czestotliwosciowych ukladu
stabilnego warunkowo?
Wyszukiwarka
Podobne podstrony:
MATLAB STEROWANIE ROBOTAMI, MATLABIK2
MATLAB STEROWANIE ROBOTAMI MATLABIK STEROWANIE
MATLAB STEROWANIE ROBOTAMI MATLABIK4
MATLAB STEROWANIE ROBOTAMI MATLABIK6
MATLAB STEROWANIE ROBOTAMI, MATLABIK3
MATLAB STEROWANIE ROBOTAMI, MATLABIK STEROWANIE
MATLAB STEROWANIE ROBOTAMI, MATLABIK5
MATLAB STEROWANIE ROBOTAMI, MATLABIK4
MATLAB STEROWANIE ROBOTAMI, MATLABIK7
MATLAB STEROWANIE ROBOTAMI, MATLABIK2
sterowanie robotami egzamin
Od modelu CAD do sterowania robotami frez 2
ZASTOSOWANIE BEZPRZEWODOWEJ SIECI INTERNET DO ZDALNEGO STEROWANIA ROBOTA
Matlab-kurs, Systemy sterowania, Systemy sterowania
Symulacja układów sterowania z wykorzystaniem pakietu MATLAB, PWr W9 Energetyka stopień inż, III Sem
Matlab cw1 2 zaoczni
cz 1, Matlab moj
Image Processing with Matlab 33
więcej podobnych podstron