10
Elektronika dla Wszystkich
Skrzynka
Porad
W rubryce przedstawiane są odpowiedzi na pytania nade-
słane do Redakcji. Są to sprawy, które, naszym zdaniem,
zainteresują szersze grono Czytelników.
Jednocześnie informujemy, że Redakcja nie jest w stanie
odpowiedzieć na wszystkie nadesłane pytania, dotyczą-
ce różnych drobnych szczegółów.
Jak ocenić pojemność trymerów np. po ilości rotorów
i statorów, ich powierzchni?
Najlepiej nie próbować zgadywać, tylko zmierzyć. Wiele mierników
uniwersalnych pozwala zmierzyć pojemność począwszy od 1pF. Po-
nieważ problem dotyczy głównie osób, mających kontakt z techniką
w.cz., można np. w układzie generatora LC porównać pojemność try-
mera z pojemnością kondensatorów o znanej pojemności.
Niedawno zajrzałem do archiwalnego numeru EdW
(06.1999) i chciałem zbudować kit AVT-2363 (monitor
stanu linii telefonicznej). Przypadkiem zauważyłem, że
jest o wiele łatwiejsza metoda wykonania takiego monito-
ra. Otóż po uzyskaniu połączenia telefonicznego polaryza-
cja linii telefonicznej zmienia się! A co dziwniejsze, zmie-
nia się z powrotem na taką, jaka była po odłożeniu słu-
chawki (rozłączeniu się). Można by ten fakt wykorzystać
i do linii telefonicznej podłączyć dwie diody LED równo-
legle, ale o odwrotnej polaryzacji. (...)
Nie wszystkie centrale odwracają biegunowość linii. Jeśli opisane
zmiany występują, warto je wykorzystać, co rzeczywiście radykalnie
upraszcza układ monitora. Należy jednak pamiętać, że w świetle
przepisów prawa, do publicznej sieci telekomunikacyjnej mogą być
dołączane wyłącznie urządzenia posiadające homologację.
Zamierzam w niedalekiej przyszłości nabyć gramofon
analogowy. Wydam na ten cel ok. 1500zł. Potrzebuję do-
datkowo przedwzmacniacza gramofonowego. Producent
gramofonu oferuje takie urządzenie w cenie ok. 350zł.
Znalazłem w jednym z numerów EdW przedwzmacniacz
gramofonowy jako kit Vellemana. Kosztuje on 33zł.
Chciałbym zapytać, czy opłaca mi się wydawać 350zł na
urządzenie, które sam mogę zrobić za 33zł? Czy kit odbie-
ga znacząco jakością od gotowych urządzeń dostępnych
w salonach hi-fi? Czy będzie on „grał” równie dobrze?
Powrót do gramofonów analogowych uważa się powszechnie za mo-
dę, a nie za uzasadnioną konieczność. Ceny gramofonów są często
zaskakująco wysokie i nie zawsze są proporcjonalne do jakości uzy-
skiwanego dźwięku. Wśród zainteresowanych często spotyka się oso-
by zupełnie pozbawione słuchu muzycznego i nieznające się w ogóle
na elektronice. Takim osobom można wmówić wszystko i „nacią-
gnąć” ich na zakup bardzo drogiego sprzętu. Naszemu Czytelnikowi,
który nie ma wyrobionej opinii, można poradzić by kupił, zmontował
i wypróbował kit Vellemana za 33zł. Najlepiej byłoby, gdyby porów-
nał brzmienie takiego taniutkiego korektora ze sprzętem dużo wy-
ższej klasy, np. u znajomego. Jeśli usłyszy wyraźną różnicę jakości –
z przekonaniem niech kupi droższy model. Jeśli nie...
Trzeba przy tym dodać, że końcowy efekt może znacznie zależeć
od zasilacza (typ, umieszczenie, co zadecyduje o ewentualnym bru-
mie i zakłóceniach) i przewodów (brum, tłumienie najwyższych skła-
dowych).
Mam jedno pytanie, mianowicie czy można na „płytce te-
stowej” opisywanej w grudniowym numerze EdW jak
KIT-3500 programować oczywiście za pomocą BASCOM-a
8051, układy z rodziny ‘51, a dokładniej chodzi mi o mi-
kroprocesor 89C2051? Sądzę, że odpowiedź jest twierdzą-
ca, ale nie jestem do końca.
W płytce AVT-3500 NIE MOŻNA programować procesorów rodzi-
ny ’51, w szczególności 89C2051. Do programowania wymagają one
napięcia +12V i nie mogą być programowane w trybie szeregowym
przez łącze SPI.
Witam miło i serdecznie, mam problem - potrzebuję coś ta-
kiego: z 1,5 wolta zrobić 12V. To znaczy mam zegarek
elektryczny i chcę go podłączyć do czegoś, ale nie wiem,
jak to zrobić - on bierze 1,5V. Podłączyłem kabelki zamiast
głośnika, chcę zwiększyć napięcie przez transformator.
Czy to dobry pomysł?
Jeśli chodzi o przebieg zmienny, zastosowanie transformatora jest
bardzo dobrym pomysłem. Ponieważ zwykle chodzi o przebieg o czę-
stotliwościach rzędu kiloherców, można wykorzystać małe transfor-
matorki na rdzeniach ferrytowych. W zależności od zastosowania
w grę może też wchodzić wykorzystanie pojedynczej cewki włączo-
nej w obwód kolektora tranzystora – wtedy podwyższenie napięcia to
po prostu wykorzystanie przepięć, pojawiających się podczas wyłą-
czania tranzystora (podczas przerywania prądu w cewce). Właśnie taki
prosty sposób stosowany jest do zwiększania głośności dźwięku w ze-
garkach naręcznych, gdzie stosuje się mało skuteczne membrany piezo.
(...) w zasilaczu sieciowym zastosowałem diody 1N4004,
a nie 1N4002. Czy to ma jakieś istotne znaczenie?
Żadnego. Czym wyższy numer, tym wyższe dopuszczalne napięcie
wsteczne. Dziś nawet w obwodach niskonapięciowych powszechnie
stosuje się diody 1N4007 o dopuszczalnym napięciu 1000V.
11
Skrzynka porad
Elektronika dla Wszystkich
Mam problem. Na studiach otrzymałem za zadanie wyko-
nanie „generatora napięcia przemiennego o regulowanej
częstotliwości”. Parametry jakie mam otrzymać to: 1 ka-
nał, na wyjściu sinusoida, napięcie regulowane od 0 do
120V AC, częstotliwość 2Hz do 100Hz, zniekształcenia
w granicach 0,5%
Zadanie na pewno do najłatwiejszych nie należy. Należy zastosować:
1. Generator funkcji (analogowy XR2205, ICL8038 lub nowocze-
śniejszy, cyfrowy system DDS), gdzie uzyskanie zniekształceń poni-
żej 0,5% jest jak najbardziej realne.
2. Wzmacniacz wysokonapięciowy może być zrealizowany albo na
wysokonapięciowym wzmacniaczu operacyjnym, albo jako klasycz-
ny wzmacniacz z tranzystorami wysokonapięciowymi.
Chciałbym się dowiedzieć, jak obliczyć, odczytać czy wy-
kreślić rząd filtru, mając jego charakterystykę pasma
przenoszenia ku=f(f).
Dla filtrów dolno- i górnoprzepustowych wystarczy sprawdzić stro-
mość charakterystyki (6dB/okt i 20dB/dek „na rząd”). W praktyce
rzadko występuje potrzeba określenia rzędu filtru. Dużo częściej na-
leży dobrać filtr do konkretnych wymagań. Obecnie ułatwiają to roz-
maite programy komputerowe.
Czym się różnią od siebie procesorki AT89c2051-24PC
od AT89c2051-24PI?
Liczba 24 to maksymalna częstotliwość rezonatora kwarcowego –
24MHz. Spotyka się też wersję 12-megahercową. Litera P na końcu
oznaczenia wskazuje na dużą, klasyczną obudowę DIL (PDIP), litera
S – na małą obudowę SMD (SOIC). Ostatnia litera wskazuje zakres
temperatur pracy: C – commercial: 0...+70
o
C
I – industrial: -40...+85
o
C
A – automotive: -40...+105
o
C
Jakim prądem będzie się ładował akumulator, który ładu-
je ładowarka nieposiadająca żadnego ograniczenia prą-
du? Czy związane jest to z gęstością elektrolitu?
Czytelnikowi zapewne chodzi o akumulatory kwasowe. Gęstość
elektrolitu ma tu niewielkie znaczenie i na pewno nie jest to zależność
jednoznacznie wyznaczająca prąd ładowania. W trakcie ładowania
gęstość elektrolitu rośnie, co oznacza zmniejszanie się i tak małej
oporności wewnętrznej.
Można sobie wyobrażać schemat zastępczy akumulatora podczas
ładowania jako potężną diodę Zenera wielkiej mocy połączoną z sze-
regowym rezystorem o bardzo małej oporności rzędu drobnego ułam-
ka oma. Napięcie tej „diody Zenera” w trakcie ładowania nieco wzra-
sta, natomiast mała rezystancja szeregowa – jeszcze bardziej maleje.
Natomiast ładowarka „bez żadnego ograniczenia prądu” nie może ła-
dować prądem o dowolnie dużym natężeniu. Schemat zastępczy ła-
dowarki „bez żadnego ograniczenia prądu” to źródło napięcia i za-
stępcza rezystancja wewnętrzna. Aktualny prąd ładowania wyznacza
głównie ta zastępcza rezystancja wewnętrzna, która zależy od wielu
czynników, w tym od wartości napięcia sieci i napięcia ładowanego
akumulatora. Ostatecznie prąd ładowania niewiele związany jest
z gęstością elektrolitu, a bardziej z właściwościami ładowarki, głów-
nie jej transformatora. Napięcie na akumulatorze podczas ładowania
nieco wzrasta, co zmniejsza prąd ładowania..
12
Elektronika dla Wszystkich
Konkurs
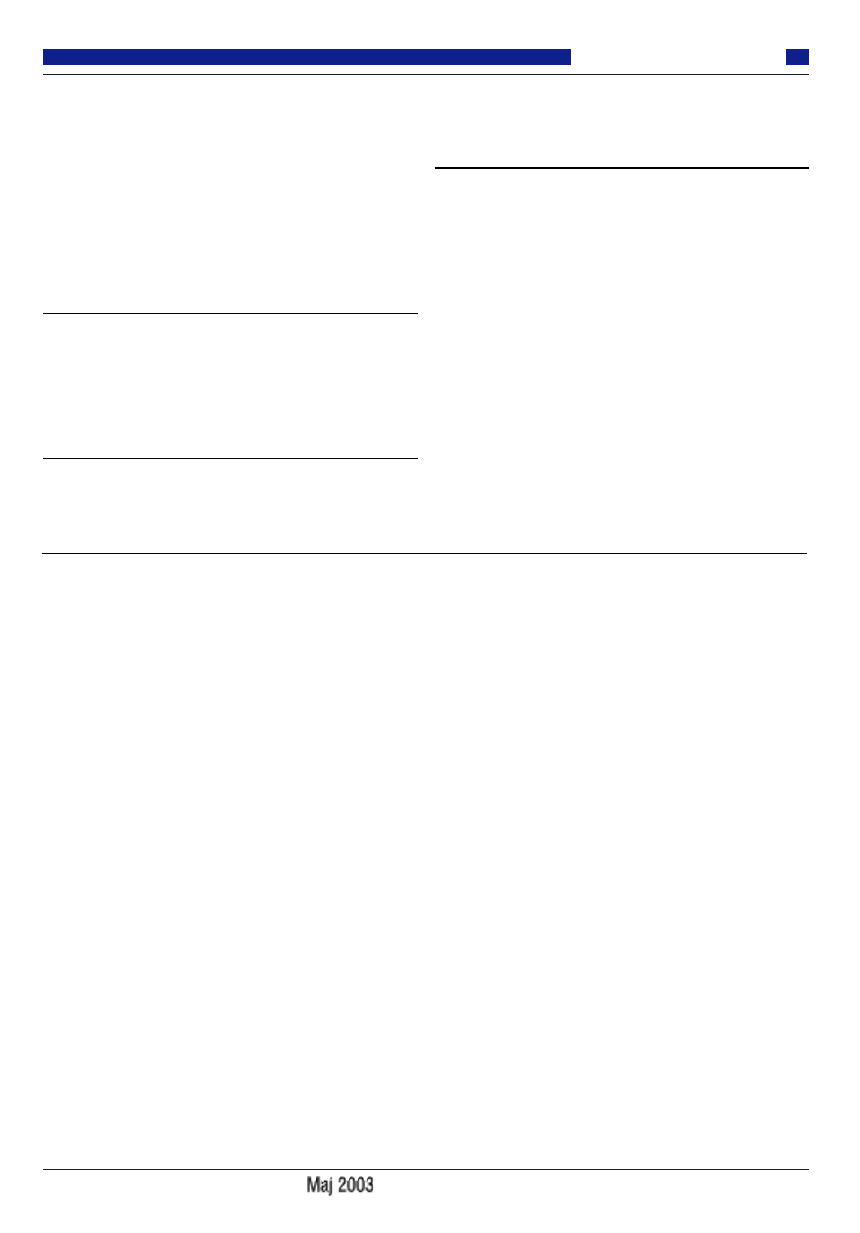
Na rysunku przedstawiony jest prosty,
trzytranzystorowy układ.
Jak zwykle zadanie konkursowe
polega na rozszyfrowaniu:
Jak działa i do czego służy ta-
ki układ?
Odpowiedzi, koniecznie oznaczo-
ne dopiskiem Jak05, należy nadsyłać
w terminie 45 dni od ukazania się tego numeru EdW. Nagrodami
w konkursie będą książki.
Rozwiązanie zadania z EdW 1/2003
Przedstawiony układ z tranzystorem
i tyrystorem został przedstawiony jako
bezpiecznik elektroniczny. Po naci-
śnięciu przycisku S tyrystor zostaje włą-
czony. Prąd obciążenia płynie przez ty-
rystor i rezystor R o niewielkiej warto-
ści. Tranzystor jest zatkany, ponieważ spadek napięcia na rezystancji
R jest za mały, by go otworzyć. Wzrost prądu spowoduje otwarcie
tranzystora. Wtedy prąd obciążenia popłynie przez tranzystor w ob-
wodzie kolektor-emiter. Takie zabranie prądu z obwodu tyrystora
spowoduje jego wyłączenie, a w konsekwencji powinno spowodować
odcięcie prądu bazy i zatkanie tranzystora. Wartość prądu maksymal-
nego wyznacza rezystor R. Jak podano w materiale źródłowym, war-
tość R przy danym prądzie zadziałania I wynosi R = 0,7V / I, przy
czym prąd I nie powinien przekroczyć 100mA.
Zdecydowana większość uczestników prawidłowo rozszyfrowała
działanie układu. Oto niektóre odpowiedzi uznane za prawidłowe:
- bezpiecznik automatyczny
- bezpiecznik nadmiarowo-prądowy
- zabezpieczenie nadprądowe
- ogranicznik prądowy
- wyłącznik prądowy
- wyłącznik elektroniczny, który przy braku zasilania i jego powrocie
nie włączy urządzenia.
A oto odpowiedzi błędne:
- układ jest zabezpieczeniem nadnapięciowym
- jest to zwykły „zatrzask”
- układ jest przełącznikiem (zatrzaskiem) prądu zmiennego
- elektroniczny wyłącznik, mogący pracować z dużymi obciążeniami
dzięki tranzystorowi.
Kilku uczestników podało nawet źródła, gdzie w starej literaturze
można znaleźć taki schemat. Kilku Kolegów wspomniało o dużej
praktycznej przydatności układu, a jeden uznał układ za nadzwyczaj
praktyczny. Niestety, praktyczna przydatność układu jest znikoma
i nie jest to pełnowartościowy bezpiecznik. Nie bardzo nadaje się też
do zasilacza jako bezpiecznik elektroniczny, a to z uwagi na poważ-
ną wadę. Tylko jeden uczestnik wyraźnie napisał, że wadą układu jest
konieczność ciągłego przepływu znacznego prądu, większego niż
prąd podtrzymywania (katalogowy parametr I
H
) użytego tyrystora.
Jeśli choć na krótką chwilę prąd obciążenia spadnie poniżej tej war-
tości, tyrystor ulegnie samoczynnemu niepotrzebnemu wyłączeniu.
Z uwagi na tę właściwość znikomy jest zakres praktycznych zastoso-
wań tego na pierwszy rzut oka interesującego układu. Układ nie był
testowany w Redakcji EdW. Jego działanie będzie zależeć od para-
metrów tranzystora i tyrystora. Właściwości nie będą zbyt dobre,
choćby ze względu na znaczne spadki napięcia na rezystorze i tyry-
storze oraz na przepływ znacznego prądu przez stosunkowo delikat-
ne złącze baza-emiter tranzystora.
Nagrody książkowe za najlepsze odpowiedzi otrzymują:
Jacek Rowgało - Bielsk, Marek Rogacki - Wągrowiec, Tomasz
Kotliński - Syców.
13
Elektronika dla Wszystkich
Grać? Ale jak grać? Oto jest pytanie. Trawe-
stując ów słynny wers pewnego dramaturga ze
Stratfordu, dochodzę do wniosku, iż do końca
świata będziemy czuć niedosyt, słuchając ko-
lejnych udoskonalanych wzmacniaczy, no
cóż, taka już nasza natura. Ale może właśnie
prezentowany wzmacniacz, zapowiadany pra-
wie dwa lata temu, spełni Wasze oczekiwania.
Jest to mostkowy wzmacniacz hybrydo-
wy oparty o wypróbowane układy lampowe
i nowoczesną technikę MOSFET. Na świe-
cie ukazało się sporo publikacji na ten temat
i to wszystko z powodu poszukiwań cieka-
wego brzmienia. Niestety opracowanie mo-
jego wzmacniacza wymagało prawie dwóch
lat. Pierwsza publikacja na ten temat ukaza-
ła się w czerwcowym EdW 2001 roku.
Chciałbym podziękować Czytelnikom za za-
interesowanie moją publikacją. Otrzymali-
śmy masę listów w tej sprawie. Szczególnie
chciałbym podziękować Panu Tomaszowi
Jezuskowi z Jeleniej Góry, który zadał sobie
sporo trudu, żeby zdobyć mój numer telefo-
nu, aby podzielić się swoimi ciekawymi
uwagami na ten temat, tyle wstępu - przejdź-
my do meritum.
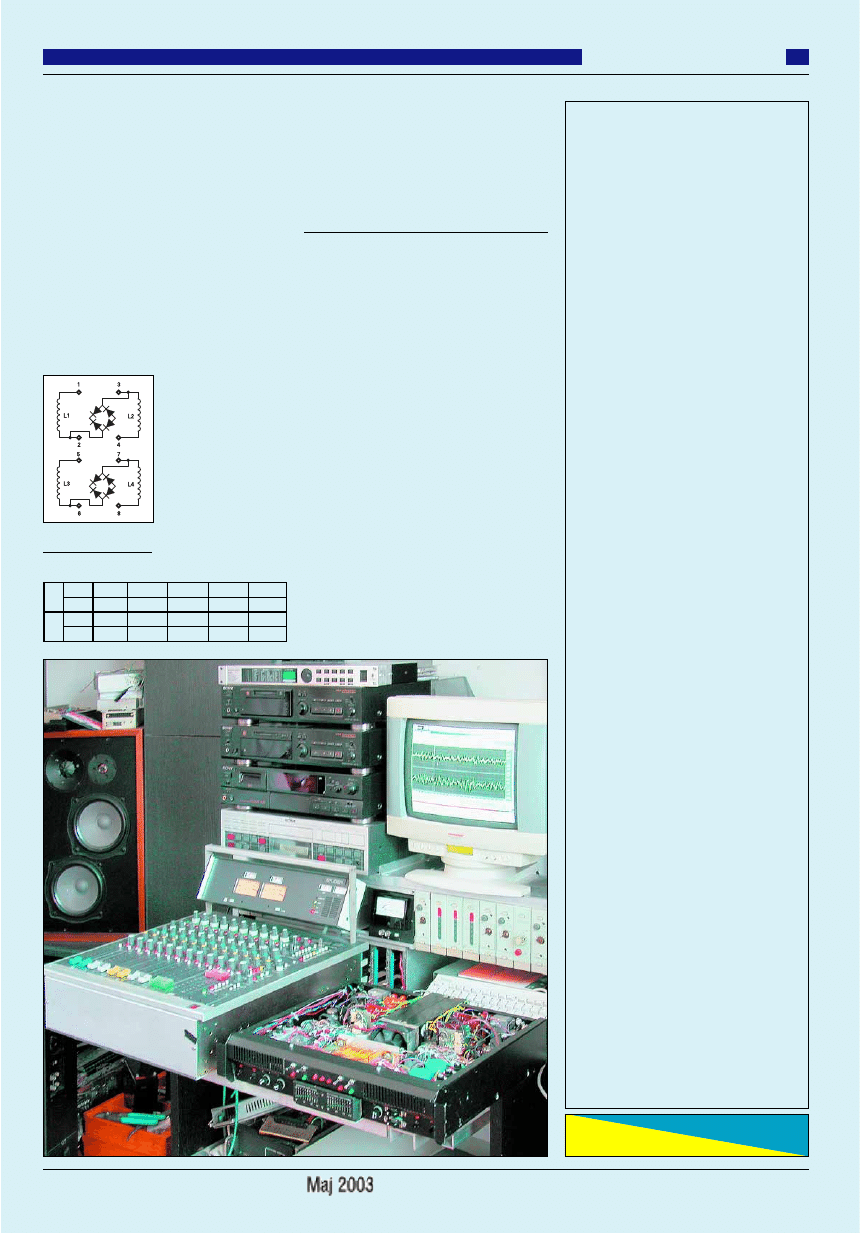
Zbudowałem wzmacniacz pod „klucz”.
Jest to urządzenie w zgrabnej obudowie profe-
sjonalnej 2U, które może być montowane
w racku lub w stojaku technicznym. Prezento-
wany wzmacniacz lampowo-mosfetowy jest
dwukanałowym lub czterokanałowym urzą-
dzeniem mogącym oddać moc rzeczywistą,
w zależności od konfiguracji, 4x80W lub
2x250W . Przy projektowaniu kierowałem się
potrzebami przeciętnego użytkownika urzą-
dzeń elektroakustycznych, jak i bardziej wyra-
finowanych, traktujących zawodowo dźwięk
słuchaczy.
Moje próby skojarzenia techniki lampo-
wej z układami mocy typu MOSFET, w po-
czątkowej fazie projektowania
wzmacniacza, miały ciężki prze-
bieg. Wzmacniacz lampowy, niezależnie od
tego, czy jest to przedwzmacniacz, czy też
końcówka mocy, wymaga zasilania wysokim
napięciem, a do tego dochodzi konieczność
żarzenia włókien grzejników katod lamp. Nie
jest to jednak największa niedogodność, po-
jawił się bowiem problem nie-
dopasowania impedancyjnego
przedwzmacniacza lampowego
ze wzmacniaczem MOSFET.
Układy lampowe charakteryzują
się niestety bardzo dużą impe-
dancją wewnętrzną. Dotyczy to
wejść i wyjść układu, a są to set-
ki k
Ω. Do tego dochodzi duży
współczynnik szumowy (efekt
śrutowy). Znaczącą wadą lamp,
szczególnie pentod napięcio-
wych, jest zjawisko mikrofono-
wania. Lampa zachowuje się
wtedy jak mikrofon pojemnościowy, a rolę
membrany pełnią tutaj siatka i anoda. Dla-
czego mimo tych niezaprzeczalnych wad
lampy przeżywają tryumfalny comeback?
Odpowiedź na to pytanie zawarłem w dalszej
części artykułu.
2
2
6
6
6
6
3
3
/
/
A
A
H
H
y
y
b
b
r
r
y
y
d
d
o
o
w
w
y
y
w
w
z
z
m
m
a
a
c
c
n
n
i
i
a
a
c
c
z
z
l
l
a
a
m
m
p
p
o
o
w
w
o
o
-
-
m
m
o
o
s
s
f
f
e
e
t
t
o
o
w
w
y
y
2
2
x
x
2
2
5
5
0
0
W
W
l
l
u
u
b
b
4
4
x
x
8
8
0
0
W
W
Dane techniczne wzmacniacza
1. Moc wyjściowa - do 250W RMS 4
Ω/praca w trybie dwukanałowym
2. Moc wyjściowa - do 200W RMS 8
Ω/praca w trybie dwukanałowym
3. Moc wyjściowa - do 80W RMS 4
Ω/praca w trybie czterokanałowym
Zniekształcenia nieliniowe: 1. 250W RMS 0,4% THD
2. 200W RMS 0,4% THD
3. 80 W RMS 0,1% THD
Impedancja wejść głównych symetrycznych - 10k
Ω w całym paśmie
Impedancja wejść dla trybu czterokanałowego - 100k
Ω w całym paśmie
Pasmo przenoszenia wzmacniacza - płasko od 10Hz do 80kHz
Poziom szumów (nieważone) - 80dB
Układ wyciszania automatycznego (muting), który umożliwia
wyłączenie wzmacniacza w przypadku chwilowego zaniku zasilania
Wzmacniacz posiada 6 wejść - 2 główne do pracy mostkowej
i 4 do pracy czterokanałowej
Rys. 1
Projekty AVT
+++
+++
14
Elektronika dla Wszystkich
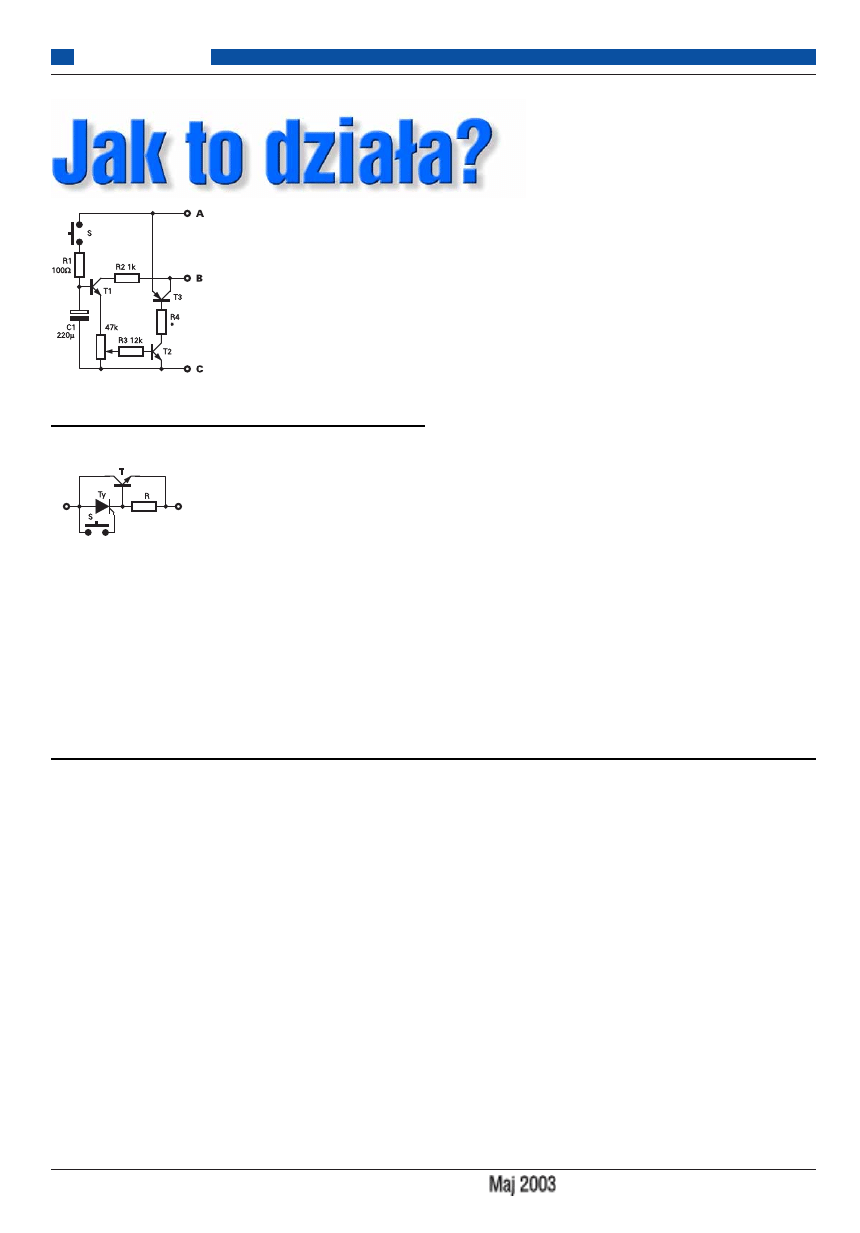
Opis układu
Schemat blokowy wzmac-
niacza lampowo-mosfeto-
wego przedstawiony zo-
stał na rysunku 1. Jak
widać, wzmacniacz skła-
da się z czterech głów-
nych modułów: przed-
wzmacniacza lampowego,
modułu sterowania, mo-
dułów mocy i zasilacza.
Przedwzmac-
niacz lampowy
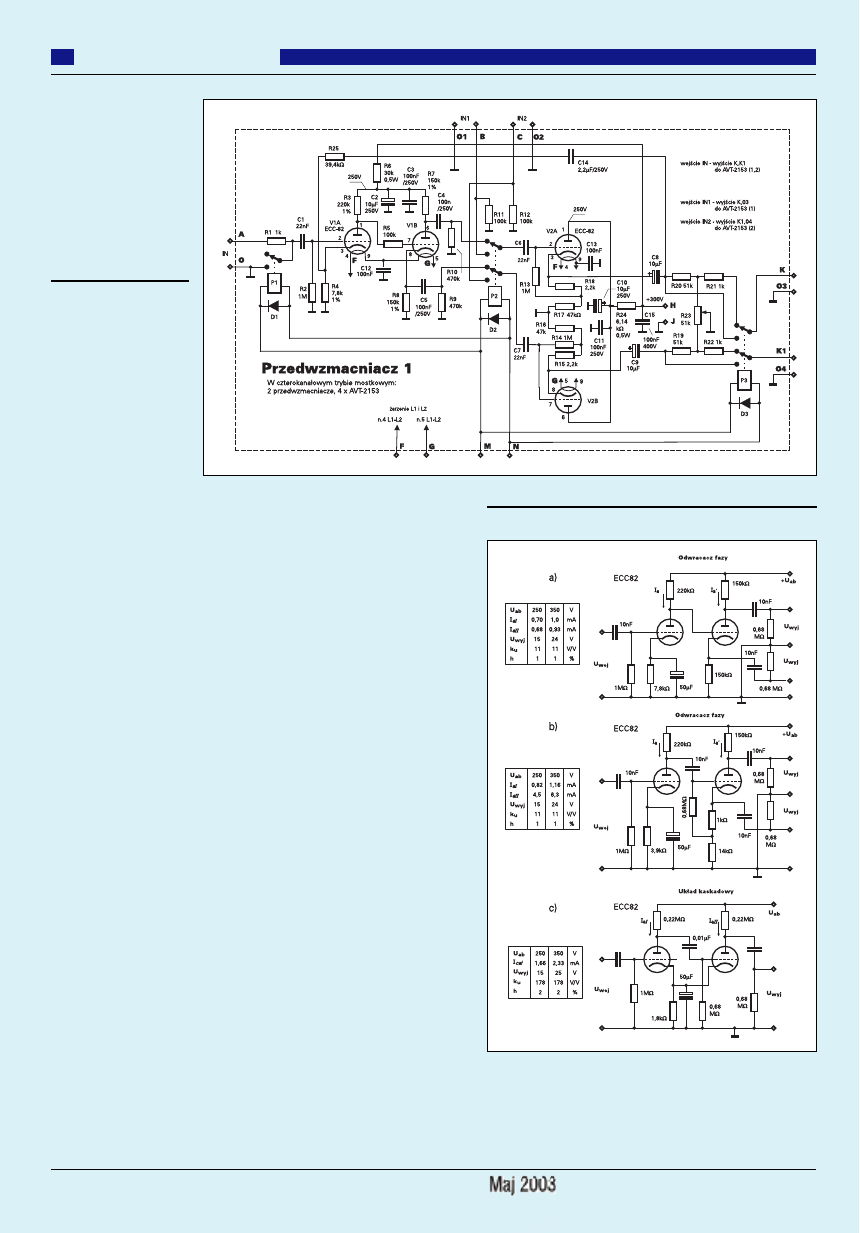
Na rysunku 2 pokazany
jest schemat przed-
wzmacniacza. Jest to
właściwie trójstopniowy
wzmacniacz oporowy,
zrealizowany na popular-
nych triodach ECC-82,
specjalnie skonstruowa-
nych do tego celu (apli-
kacja ECC-82 przedsta-
wiona została na rysun-
ku 3). Pierwsza połówka tej lampy (V1A)
pełni rolę wzmacniacza napięciowego, który
jest sprzężony galwanicznie z odwracaczem
fazy (V1B). Ten stopień (druga połówka
ECC-82) nie wzmacnia. Jego wzmocnienie
wynosi <1. Ma on za zadanie jedynie od-
wrócić o 180
o
fazę sygnału sterującego dwo-
ma wzmacniaczami mocy. Otrzymujemy za-
tem z katody i anody drugiej połówki ECC-
82 (V1B) dwa sygnały o jednakowych ampli-
tudach ale o przeciwnych fazach. Tu właśnie
leży tajemnica dużej sprawności wzmacnia-
czy przeciwsobnych PUSH-PULL. Ta wła-
śnie zasada legła u podstaw współczesnych
wzmacniaczy mostkowych. Wróćmy jednak
do naszego układu lampowego. Pojawił się
problem wysokiej amplitudy sygnału. Wyno-
si ona bowiem aż 7V, a impedancja wejścio-
wa tego odwracacza równa się 150k
Ω. Do
wejścia tego przedwzmacniacza, w trakcie
testu, doprowadzony został sygnał o pozio-
mie 0,775V/0dB/1kHz stanowiący odniesie-
nie przyjęte w telekomunikacji. Przedwzmac-
niacz ten, zwany też „katodyną”, wzmacnia
sygnał dziesięciokrotnie, czyli około 20dB.
Wszystko się zgadza. Siatka pierwsza lamp
wymaga tak dużego napięcia sterującego nie-
zbędnego do odpowiedniego wysterowania
końcówki mocy.
Poza tym, tak duża amplituda odwracacza
fazy jest konieczna do prawidłowego funk-
cjonowania transformatora wyjściowego
wzmacniacza, który jest elementem wybitnie
nieliniowym. Wymaga więc objęcia głębo-
kim, ujemnym sprzężeniem zwrotnym 20dB.
Wzmacniacze MOSFET (cztery kity
AVT-2153), które pracują w moim wzmac-
niaczu, do pełnego wysterowania wymagają
sygnału 0dB. Nie pozostaje nam nic innego,
jak ten sygnał z odwracacza stłumić. Tylko
jak? Po pierwsze, należy
wprowadzić ujemne sprzęże-
nie zwrotne między wejściem
układu
przedwzmacniacza
a wyjściem odwracacza. Nie-
stety, impedancja wyjściowa
inwertera fazy jest zbyt duża,
wynosi bowiem 150k
Ω,
a z kolei impedancja wejścio-
wa na katodę pierwszej po-
łówki ECC-82 jest mała i wy-
nosi zaledwie 7,8k
Ω. W tej
sytuacji, z powodu niedopaso-
wania impedancyjnego układ
nie będzie funkcjonować. Je-
dynym sensownym rozwiąza-
niem jest zastosowanie trio-
dowego przemiennika impe-
dancji (wtórnik katodowy),
który działa podobnie jak
wtórnik emiterowy. Charakte-
rystyczną cechą takich prze-
mienników jest ich duża impe-
dancja wejściowa i bardzo
mała impedancja wyjściowa.
Dlatego też problem ten roz-
wiązały owe wtórniki, dzięki
którym mogłem stłumić sy-
gnał przedwzmacniacza trzy-
krotnie tj. ok. 10dB.
Dlaczego tylko 10dB, a nie
20dB? Dlatego, iż dalsze
zwiększanie głębokości ujem-
nego sprzężenia zwrotnego nie
zmniejszało już szumów i znie-
kształceń nieliniowych, a jedynie obciążało
zbytnio wyjście wtórnika katodowego. Dla
przykładu podam, że rezystor R25, który usta-
lał głębokość „pętli” na -10dB, ma wartość
39,4k
Ω. Aby zejść z pętlą na -20dB, trzeba by
zredukować jego wartość do 600
Ω. Niestety,
oporność taka źle wpływała na pracę układu.
Pozostałe 10dB postanowiłem zredukować na
dzielniku napięcia, który jest właściwie czwór-
nikiem zawierającym dodatkowo rezystor
Rys. 2
Rys. 3
Projekty AVT
nastawny – bardzo ważny przy kalibracji
wzmacniacza. On to właśnie ustawia syme-
trię napięć sterujących mostek. Tłumik ten
połączony jest z wyjściami wtórników kato-
dowych. Poprawia także parametry szumowe
przedwzmacniacza o co najmniej 10dB.
W efekcie tych wszystkich zabiegów sy-
gnał podany na wejście siatki pierwszej
przedwzmacniacza zostaje przesunięty w fa-
zie w drugim stopniu, a dalej przez wtórniki
impedancji o rezystancji wyjściowej 5k
Ω,
doprowadzony zostaje do dwóch końcówek
mocy, których impedancja wejściowa wyno-
si 22k
Ω.
Widzimy tu wyraźnie, iż zostały spełnio-
ne warunki dopasowania napięciowego wyj-
ście-wejście, a także warunki dopasowania
impedancyjnego. Impedancja źródła sterują-
cego tor elektroakustyczny powinna być wie-
lokrotnie mniejsza od wejścia urządzenia ste-
rowanego. Impedancja wyjściowa wtórnika
katodowego wynosi około 5k
Ω. Impedancja
wejścia wzmacniacza MOSFET to ok. 22k
Ω.
Mamy więc sytuację idealną. Zrealizowany
został także warunek dopasowania napięcio-
wego. Na wyjściu źródła, czyli wtórnika ka-
todowego za tłumikiem, napięcie wynosi
0,775V, czyli tyle co na wejściu przed-
wzmacniacza. Taka wartość jest potrzebna
do pełnego wysterowania układu mostkowe-
go wzmacniacza.
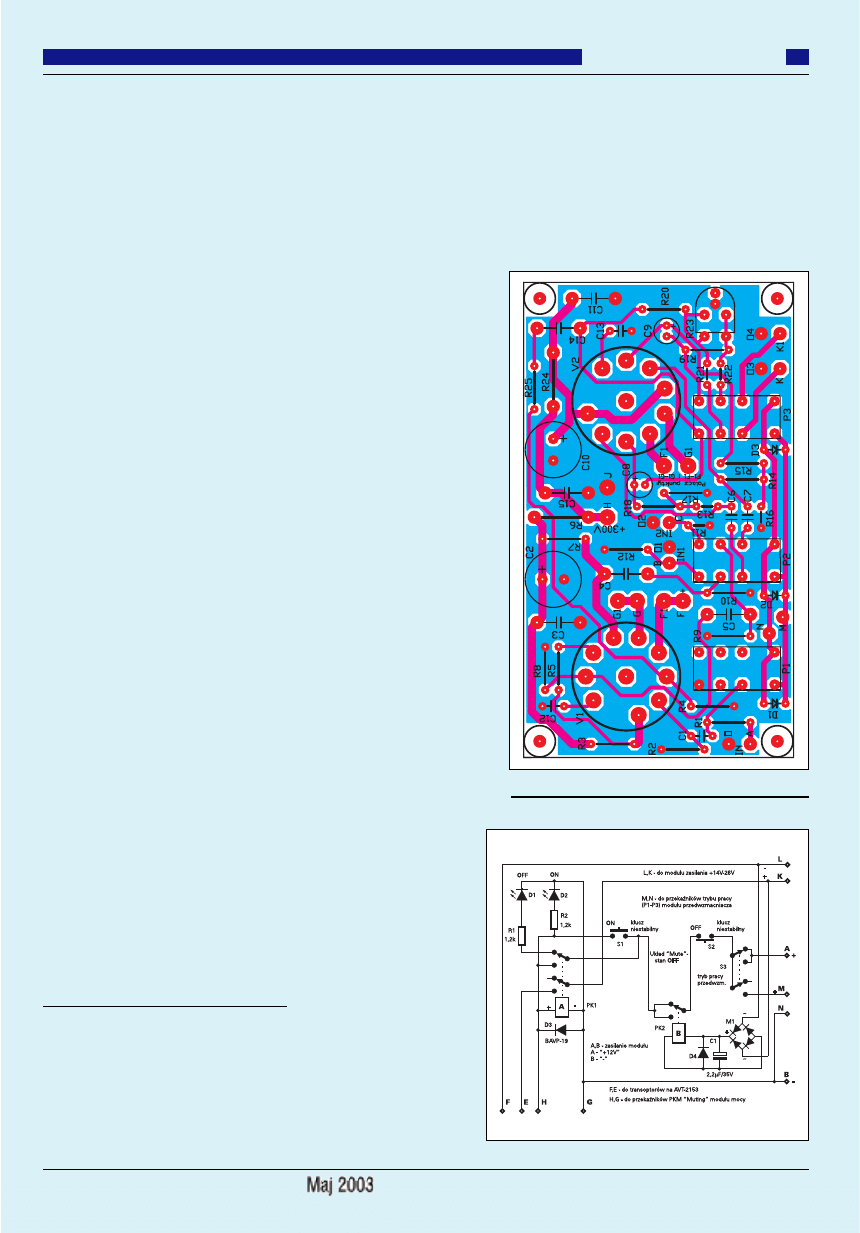
Przedwzmacniacz można zmontować na
płytce drukowanej pokazanej na rysunku 4.
W czterokanałowym trybie pracy (4x80W/
4
Ω), jak również w dwukanałowym mostko-
wym (2x250W/4
Ω; 2x200W/8Ω) potrzebne
są dwie płytki drukowane przedwzmacnia-
cza. Jedna płytka wystarczy podczas monta-
żu wzmacniacza o mocy 2x80W/4
Ω.
Czterokanałowy tryb pracy
przedwzmacniacza
Przełącznik trybu pracy podaje napięcie na
cewki przekaźników: P1, P2, P3, tym samym
przekaźnik P1 zwiera siatkę sterującą triody
przedwzmacniacza do masy, przekaźnik P2
odłącza wejścia wtórników katodowych od
inwertera fazy i przełącza na dodatkowe wej-
ścia wzmacniacza czterokanałowego.
Zbędny stał się w związku z tym dziesię-
ciodecybelowy tłumik, ponieważ przekaźnik
P3 przełącza wejścia mostka mocy wprost do
katod wtórników. Tłumienie sygnału stało się
zbędne, ponieważ wtórniki katodowe nie
wzmacniają, wręcz przeciwnie, lekko go tłu-
mią.
Moduł sygnalizacji
i sterowania
Każde współcześnie produkowane urządze-
nie elektroniczne lub elektryczne wyposażo-
ne jest w małe „centrum dowodzenia”. Rolę
tę pełni zazwyczaj procesor lub EPROM.
Przystępując do projektowania wzmacnia-
cza, brałem pod uwagę zastosowanie proce-
sora, który by sterował podstawowymi funk-
cjami mojego urządzenia, trybem pracy, au-
tomatycznym wyciszaniem i przełączaniem
wejść i wyjść wzmacniacza. Zdałem sobie
jednak sprawę, iż średnio zaawansowany lub
początkujący elektronik może źle tolerować
obecność mikroprocesorowych „wynalaz-
ków”. EPROM jako „serce” urządzenia wy-
maga także elementów wykonawczych (ko-
mutacyjnych). Zwykle są to CMOS-y albo
przekaźniki. Po co jednak kompli-
kować sobie życie?
Działanie mojego modułu jest
niezwykle proste. Można spokojnie
obyć się bez procesora, a całą „ro-
botę” wykonają dwa małe przeka-
źniki!
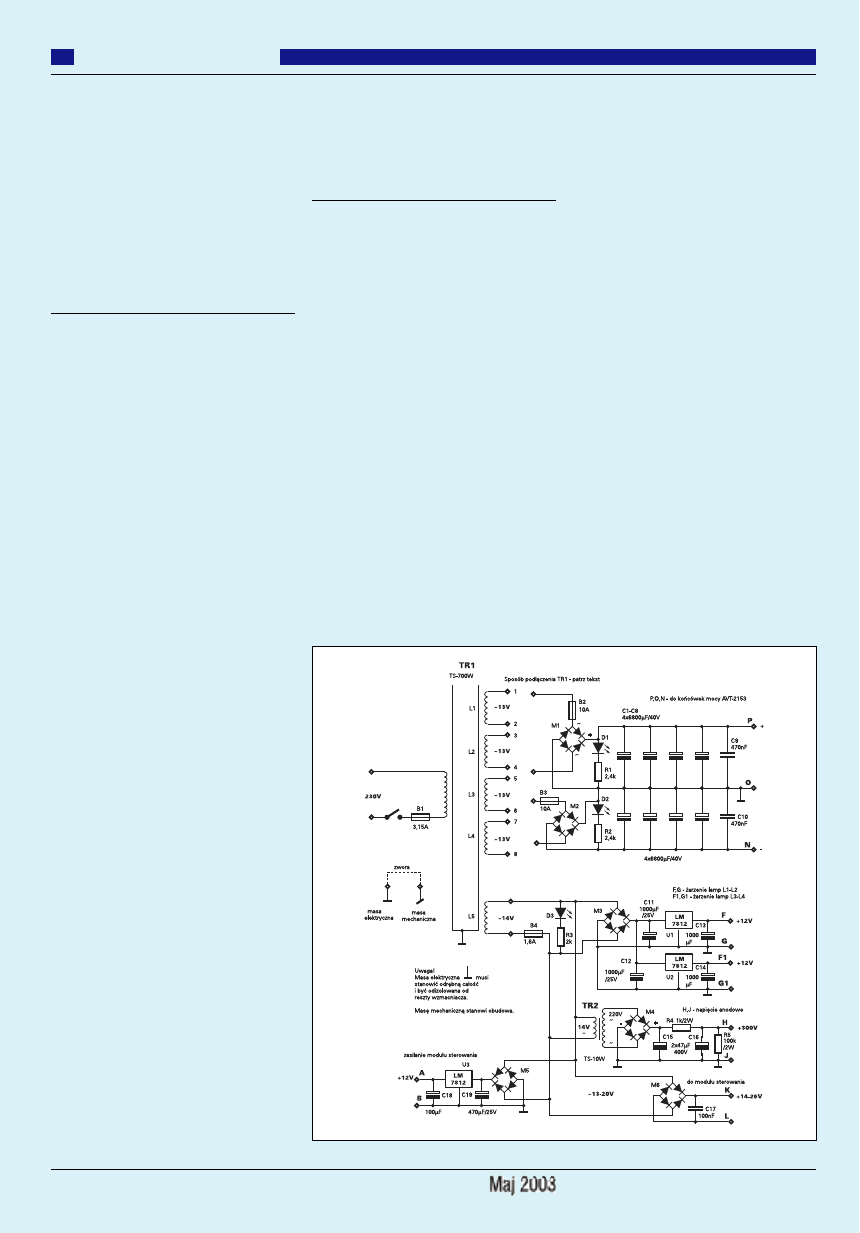
Spójrz teraz na schemat modułu
sterowania (na rysunku 5).
Głównym zadaniem tego ukła-
du jest dostarczenie w sposób kon-
trolowany napięć sterujących do
wzmacniacza, a więc do przekaźni-
ków i transoptorów modułu mocy
a także do przedwzmacniacza lam-
powego. Moduł sygnalizacji zasila,
poprzez dwusekcyjny wyłącznik
trybu pracy, przekaźniki znajdujące
się na płytce przedwmacniacza
lampowego (P1, P2, P3), które
przełączają się jednocześnie. To sa-
mo napięcie podane jest także na
przekaźnik przełączający uzwoje-
nia transformatora sieciowego.
Włączanie tego napięcia realizuje
pierwsza sekcja przełącznika dwu-
sekcyjnego. Druga sekcja tego
przełącznika w trakcie przełączania
na krótko przerywa obwód układu
MUTE, skutecznie tym samym
wyciszając wzmacniacz. Gwaran-
tuję Wam, że nie usłyszycie trza-
sków komutacyjnych w trakcie
przełączania trybu pracy wzmac-
niacza.
Moduł sterowania zawiera
także układ czuwający, zreali-
zowany na przekaźniku B
(PK2). Układ czuwający ma za
zadanie, w przypadku chwilo-
wego zaniku zasilania sieci,
automatycznie wyciszyć
wzmacniacz. Styki tego prze-
kaźnika na moment przerywają
obwód układu MUTE i powo-
dują wyciszenie wzmacniacza.
Po pojawieniu się zasilania
wzmacniacz jest w stanie wy-
ciszonym i należy ponownie
włączyć przycisk ON.
Na koniec zostawiłem „ser-
ce” modułu - układ MUTE.
Zrealizowany on został na
przekaźniku A (PK1). Zasada
działania tego systemu jest
prosta. Wykorzystałem zjawisko „samopod-
trzymania”, tzn. że uzwojenie tego przeka-
źnika jest zasilane poprzez jego własne styki,
a więc przekaźnik podtrzymuje styki tak dłu-
go, dopóki nie przerwiemy na moment ob-
wodu zasilania cewki. Aby ponownie go
włączyć, należy przycisnąć niestabilny
włącznik ON (S1). Aby wyciszyć wzmac-
niacz, wciskamy włącznik niestabilny OF
15
Elektronika dla Wszystkich
Rys. 4
Rys. 5
Projekty AVT
(S2), przerywając w ten sposób na chwilę ob-
wód cewki przekaźnika.
Poprzez styki przekaźnika A dostarczamy
napięć do transoptorów układu MUTE
w końcówkach mocy a także do przekaźni-
ków odłączających głośniki od końcówek
mocy. Napięcie na transoptorach i przekaźni-
kach mocy pojawia się jednocześnie, gwa-
rantuje to bezpieczną pracę wzmacniacza,
a także daje 100% pewność, iż nasze głośni-
ki nie zostaną uszkodzone.
Moduł sterowania można zmontować na
płytce uniwersalnej.
Moduł mocy
Do budowy tej części urządzenia wykorzy-
stałem znajdujące się w ofercie AVT kity
wzmacniacza mocy 100W (AVT-2153),
opracowane przez Pana Piotra Góreckiego.
Dlaczego wybrałem tę ofertę? Z kilku
powodów...
Zdecydowały o tym względy eksploata-
cyjne, a także wyjątkowe walory brzmienio-
we owego wzmacniacza, a jest to ,,płytka”
oparta o nowoczesny układ scalony SGS
Thompson o oznaczeniu TDA7294. Układ
ten umożliwia wykonanie wzmacniacza
o doskonałych parametrach dynamicznych,
a poza tym zawiera w sobie stopień wyjścio-
wy zrealizowany na tranzystorach MOSFET,
a jak wiadomo, MOSFET-y „grają lampo-
wo”. Ten projekt posiada jeszcze jedną cenną
rzecz, a mianowicie funkcję MUTE. Autor
tego opracowania w sposób zupełnie genial-
ny użył transoptora, który bezszumowo wy-
łącza i włącza wzmacniacz napięciem zmien-
nym lub wyprostowanym, ale bez użycia fil-
tru. W celu poprawienia liniowości w zakre-
sie dolnego pasma częstotliwości, wymieni-
łem kondensator C7 w pętli ujemnego sprzę-
żenia zwrotnego. Pojemność 10µF zamieni-
łem na 100µF. Zmieniłem też wartość kon-
densatora C1 470nF na 10µF tantalowy. Po
tych zmianach wzmacniacz przenosi płasko
częstotliwości od 10Hz do 80kHz, pomiaru
dokonałem przy mocy wyjściowej 5W.
Wszystkich, którzy są ciekawi szczegółów
kitu AVT-2153, odsyłam do artykułu
„Wzmacniacz 100W”, który ukazał się
w EdW w lipcu 1997 roku.
Cztery zakupione przeze mnie wzmacnia-
cze zostały zawieszone po dwa z każdej stro-
ny na specjalnie skonstruowanym korpusie,
który składa się z dwóch radiatorów złożo-
nych razem żeberkami do wewnątrz. W ten
sposób utworzony został tunel niezbędny do
wymuszonej cyrkulacji powietrza. Krążenie
podgrzanego powietrza „wymusza” wentyla-
tor umieszczony u wejścia kanału. Dlaczego
potrzebny jest aż tak wysoko sprawny system
chłodzenia?
Pamiętajcie! Radiator ten musi odprowa-
dzić nadmiar ciepła z dwóch wzmacniaczy
mostkowych. Pojedynczy wzmacniacz, który
oddaje przykładowo moc 20W, w parze z dru-
gim w układzie mostkowym i sterowany in-
werterem fazy oddaje prawie 80W mocy wyj-
ściowej! A więc ta moc wzrosła czterokrot-
nie. Jak już wspomniałem, pojawił się pro-
blem z oddaniem ciepła przez wzmacniacze
w konsekwencji wzrostu prądu i napięcia.
Moduł zasilania
Dobrze zaprojektowany zasilacz stanowi
podstawę sukcesu takiego przedsięwzięcia
jak budowa wzmacniacza mostkowego
o łącznej mocy wyjściowej 500W.
Przy sprawności tego urządzenia (klasa AB)
wynoszącej 60% będziemy zmuszeni do zasto-
sowania transformatora sieciowego o mocy ok.
700VA, z góry więc eliminujemy rdzeń na bla-
chach EI. Transformator zbudowany w tej tech-
nologii byłby duży, ciężki oraz kosztowny. Po-
zostaje jeszcze „toroid”. Transformatory takie
wykonywane są jednak na zamówienie i nie
proponuję nawijania ich samodzielnie. Poza
tym, transformator toroidalny wymaga umiejęt-
nego włączania do sieci. W szereg uzwojenia
pierwotnego należy włączyć rezystor ok.
15
Ω potrzebny do zredukowania prądu im-
pulsu występującego w chwili włączenia
transformatora. Rezystor ten należy z kolei
zewrzeć, gdy wzmacniacz zacznie pracować.
Dalszy opis dotyczy tylko tych Czytelni-
ków, którzy pragną zbudować wzmacniacz
2x250W. Jeśli zamiarem jest budowa urzą-
dzenia o mocy wyjściowej 2x100W/4
Ω lub
2x120W/8
Ω, to można spróbować taki trans-
formator zaprojektować samodzielnie lub ku-
pić gotowy. Na warszawskim Wolumenie leżą
na stoiskach całe stosy transformatorów, „toro-
idy” oraz na blachach EI. Wykonując transfor-
mator samodzielnie, należy pamiętać o napię-
ciu sieci 230V, oraz o fakcie, że bez obciążenia
napięcie na wtórnym uzwojeniu jest większe
od żądanego. Nie można też zapominać:
- o gęstości prądu na mm
2
przewodu nawojo-
wego (Ag, Cu),
- przekroju kolumny środkowej rdzenia dla
blach EI
- o liczbie zwojów na Wolt.
Zakładam, że znane są Wam zasady pro-
jektowania transformatorów. Bez tej wiedzy
nawet nie próbujcie zaczynać, bo stracicie
pieniądze i czas.
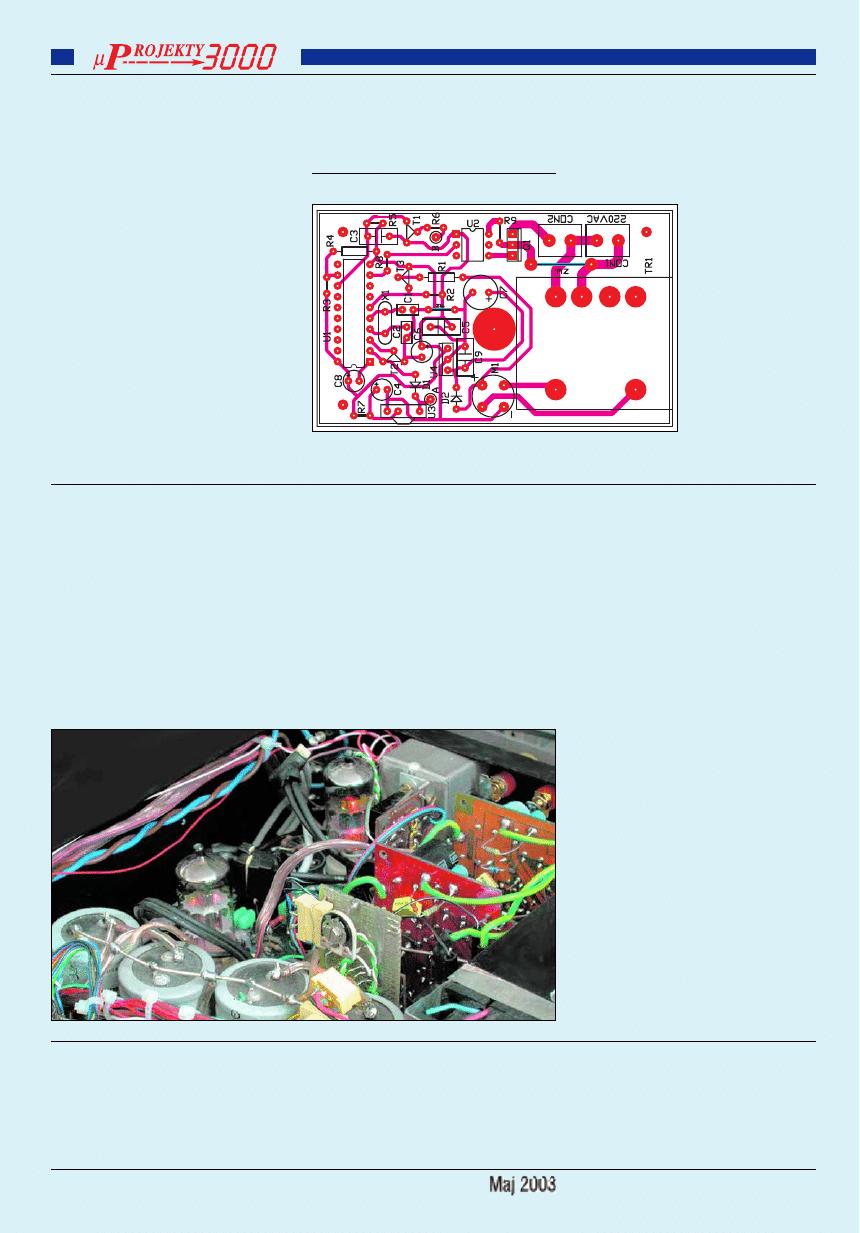
Schemat ideowy zasilacza przedstawiony
został na rysunku 6.
W moim wzmacniaczu potrzebna jest
moc 2x100W/4
Ω jaką konsumują profesjo-
nalne kolumny firmy STUDER. Proszę spoj-
rzećteraz na transformator sieciowy. Posiada
on 4 sekcje uzwojenia, każda po 13V/10A.
Uzwojenia te, w zależności od potrzebnej
mocy wyjściowej urządzenia, łączymy rów-
nolegle po dwie sekcje dla mocy wyjściowej
2x100W/4
Ω i szeregowo po 2 sekcje dla mo-
cy wyjściowej 2x180W/8
Ω.
Chciałbym poświęcić teraz trochę miejsca
zasilaczowi wysokiego napięcia części lam-
powej wzmacniacza. Zdobycie transformato-
ra wysokiego napięcia w dobie obwodów
16
Elektronika dla Wszystkich
Rys. 6
Projekty AVT
17
Elektronika dla Wszystkich
scalonych graniczy z cudem. Trzeba było za-
stosować fortel. Udało mi się uniknąć rozbie-
rania starych odbiorników lampowych w po-
szukiwaniu upragnionego transformatora. Na
Wolumenie kupiłem transformator sieciowy
220V/14V – o mocy 20W, po czym odwróci-
łem go uzwojeniami. Uzwojenie wtórne sta-
ło się pierwotnym, a pierwotne wtórnym.
W ten sposób uzyskałem wymagane 300V.
Należy pamiętać, aby napięcie uzwojenia
pierwotnego zakupionego transformatora by-
ło tożsame z napięciem uzwojenia L-5 głów-
nego transformatora sieciowego wzmacnia-
cza. Tabela 1 prezentuje uzyskaną moc wyj-
ściową wzmacniacza w układzie mostkowym
w funkcji napięcia zasilania i obciążenia.
Oto zasady łącze-
nia uzwojeń wtór-
nych transformatora
sieciowego wzmac-
niacza (rysunek 7):
Dla uzyskania niż-
szego napięcia ±15V
zasilacza dla mocy
wyjściowej 100W –
4
Ω na kanał, uzwoje-
nia łączymy równole-
gle, czyli punkt 1 z 3,
a punkt 2 z 4.
Dla uzyskania wyższego napięcia ±28V
dla mocy wyjściowej 180 W – 8
Ω na kanał,
uzwojenia łączymy szeregowo, zwieramy
punkt 1 z 4 i rozwieramy punkt 2 z punktem 4.
Identycznego przełączenia dokonujemy na
L-3 i L-4. Przełączenia tych uzwojeń realizuje
czterosekcyjny przekaźnik, posiadający styki
i zestyki typu R-15 (prąd styków po 10A).
Montaż i uruchomienie
Kiedy znajdziesz dobrą obudowę i radiatory
z dużymi żeberkami, możesz montować urzą-
dzenie. Transformator sieciowy należy umieś-
cić jak najdalej od płytek „lampowych”
i transformatorów wejściowych. Elektrolity
powinny znajdować się jak najbliżej koń-
cówek mocy, łącz je grubym drutem, połącze-
nia lutowane muszą być dobrze przegrzane.
Wejściowe transformatory symetryzujące
(np. produkcji „Cenrit” - o przekładni zmniej-
szającej 3x) muszą być obudowane ekranem
magnetycznym, a to z uwagi na rozproszone
pole magnetyczne transformatora sieciowego.
Masa mechaniczna, czyli masa obudowy
wzmacniacza, musi być połączona z masą
elektryczną to jest z „zerem” głównego zasi-
lacza. W praktyce zwieramy obie masy
w okolicach transformatora sieciowego.
Po włączeniu zasilacza zaświeci się dioda
LED D1 wyłącznika „OFF” . Sprawdź napię-
cia na elektrolitach głównego zasilacza.
Zmierz napięcie anodowe.
Ciąg dalszy na stronie 22.
Wykaz elementów
Przedwzmacniacz (1)
Rezystory
R1,R21,R22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ
R2,R13,R14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220kΩ 1%
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7,8kΩ 1%
R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30kΩ 0,5W
R7,R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .150kΩ 1%
R9,R10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470kΩ
R11,R12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R15,R18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2kΩ
R16,R17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47kΩ
R19,R20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51kΩ
R23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51kΩ
R24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6,14kΩ 0,5W
R25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39,4kΩ
Kondensatory
C1,C6,C7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22nF
C12,C13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF
C14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2µF/250V
C2,C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10µF/250V
C3-C5,C11 . . . . . . . . . . . . . . . . . . . . . . . . . .100nF/250V
C15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF/400V
C8,C9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10µF/16V
Inne
D1-D3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
P1-P3 . . . . . . . . . . . . . . . . . . . . . . .przekaźnik DS2Y 12V
V1,V2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .lampy ECC82
Podstawki pod lampy
Moduł sterowania
R1,R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1,2kΩ
C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2µF/35V
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LED czerwona
D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LED zielona
D3,D4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BAVP19
M1 . . . . . . . . . . . . . . . . . . . . . . . . . . .mostek Graetza 1A
PK1 . . . . . . . . . . . . . . . . . . . .dwusekcyjny przekaźnik 12V
PK2 . . . . . . . . . . . . . . . . . . .jednosekcyjny przekaźnik 12V
S1,S2 . . . . . . . . . . . . . . . . . . . . . . . .włącznik niestabilny
S3 . . . . . . . . . . . . . . . . . . . . . . .dwusekcyjny przełącznik
Zasilacz
R1,R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,4kΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2kΩ
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ 2W
R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ 2W
C1-C8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6800µF/40V
C9,C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470nF
C11,C12 . . . . . . . . . . . . . . . . . . . . . . . . . . .1000µF/25V
C13,C14 . . . . . . . . . . . . . . . . . . . . . . . . . . .1000µF/16V
C15,C16 . . . . . . . . . . . . . . . . . . . . . . . . . . . .47µF/400V
C17 . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF ceramiczny
C18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470µF/25V
M1,M2 . . . . . . . . . . . . . . . . . . . . . . .mostek Graetza 20A
M3-M6 . . . . . . . . . . . . . . . . . . . . . . . .mostek Graetza 1A
D1,D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LED
U1-U3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM7812
B1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BT 3,15A
B2,B3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10A
B4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1,6A
TR1 . . . . . . . . . . . . . .transformator 700W (patrz schemat)
TR2 . . . . . . . . . . . . . . . . . . .transformator 220V/14V 10W
Moduł mocy
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BAVP-19
PKM . . . . . . . . . . . . . . . . .przekaźnik 12V 30A
Kity AVT-2153 – „Wzmacniacz 100W” z EdW 7/1997
Płytka ddrukowana jjest ddostępna ww sieci
handlowej AAVT jjako kkit sszkolny AAVT-22663/A.
Projekty AVT
U
zas
15V
16V
20V
22V
25V
P
w y
90W
116W
160W
200W
250W
U
zas
20V
22V
25V
30V
P
w y
80W
120W
140W
200W
4Ω
Ω
8Ω
Ω
Rys. 7
Tabela 1
18
Elektronika dla Wszystkich
Do czego to służy?
Życie pokazuje, że układy sterowane pod-
czerwienią cieszą się niesłabnącą popularno-
ścią wśród Czytelników EdW. Są to zazwy-
czaj proste, zdalnie sterowane włączniki/wy-
łączniki urządzeń zasilanych z sieci energe-
tycznej np. lampek. Prezentowany układ peł-
ni bardziej skomplikowaną funkcję – oprócz
włączania i wyłączania umożliwia on przede
wszystkim płynną regulację jasności żarówki
za pośrednictwem pilota zdalnego sterowa-
nia. Nie ogranicza się przy tym, jak wszyst-
kie prezentowane dotychczas konstrukcje, do
nadajników pracujących w kodzie RC5. Nie
korzysta z gotowych procedur odbioru – są
one krok po kroku napisane. Model - zupeł-
nie przykładowo - współpracuje z pilotami
RC5 i RECS80, a napisane w języku C opro-
gramowanie umożliwia łatwe dodanie prak-
tycznie dowolnego innego pilota, na przy-
kład wysyłającego dane w kodzie SONY,
który stosunkowo często stosowany jest
przez wytwórców sprzętu RTV z Dalekiego
Wschodu, zwłaszcza Japończyków. Umożli-
wienie współpracy z pilotami pracującymi
w kilku popularnych standardach ma ogrom-
ną zaletę – niezależnie od tego, jaki nadajnik
posiadamy, najprawdopodobniej będzie on
współpracował z regulatorem. Ponadto jeśli
ktoś wykona regulator dla np. kolegi, który
nie ma pilota RC5, to nie będzie on zmuszo-
ny do kupienia takowego. Urządzenie samo
rozpoznaje, z jakim typem pilota współpra-
cuje, posiada także zabezpieczenie przed re-
akcją na sygnały podczerwone zakodowane
w standardzie innym niż kody przewidziane
przez programistę.
Jak to działa?
Na początek słówko o obsłudze regulatora.
Jest ona bardzo prosta - po włączeniu zasila-
nia układ należy poinformować o funkcjach,
jakie chcemy przypisać czterem dowolnie
wybranym przyciskom pilota. W tym celu
wciskamy w kolejności przyciski mające peł-
nić następujące funkcje: 1 - włączenie świa-
tła, 2 - zwiększenie jasności, 3 - zmniejszenie
jasności, 4 - wyłączenie światła. Wybrałem
taką kolejność, bo jak sądzę, łatwo ją zapa-
miętać – kojarzy się z przejściem od najwięk-
szej do najmniejszej jasności. To wszystko –
można teraz wygodnie zdalnie regulować ja-
sność lampki. Celowo nie zastosowałem pa-
mięci EEPROM lub mikrokontrolera zawie-
rającego ją „na pokładzie” – procedura ucze-
nia jest banalnie prosta i nieuciążliwa, a poza
tym należy sądzić, że regulator nie będzie
zbyt często wyłączany z sieci. Samo uczenie
polega na zapamiętaniu komend przypisa-
nych przyciskom. Adresy, jak i rodzaj kodu
nie są zapamiętywane – uznałem, że nie jest
to konieczne.
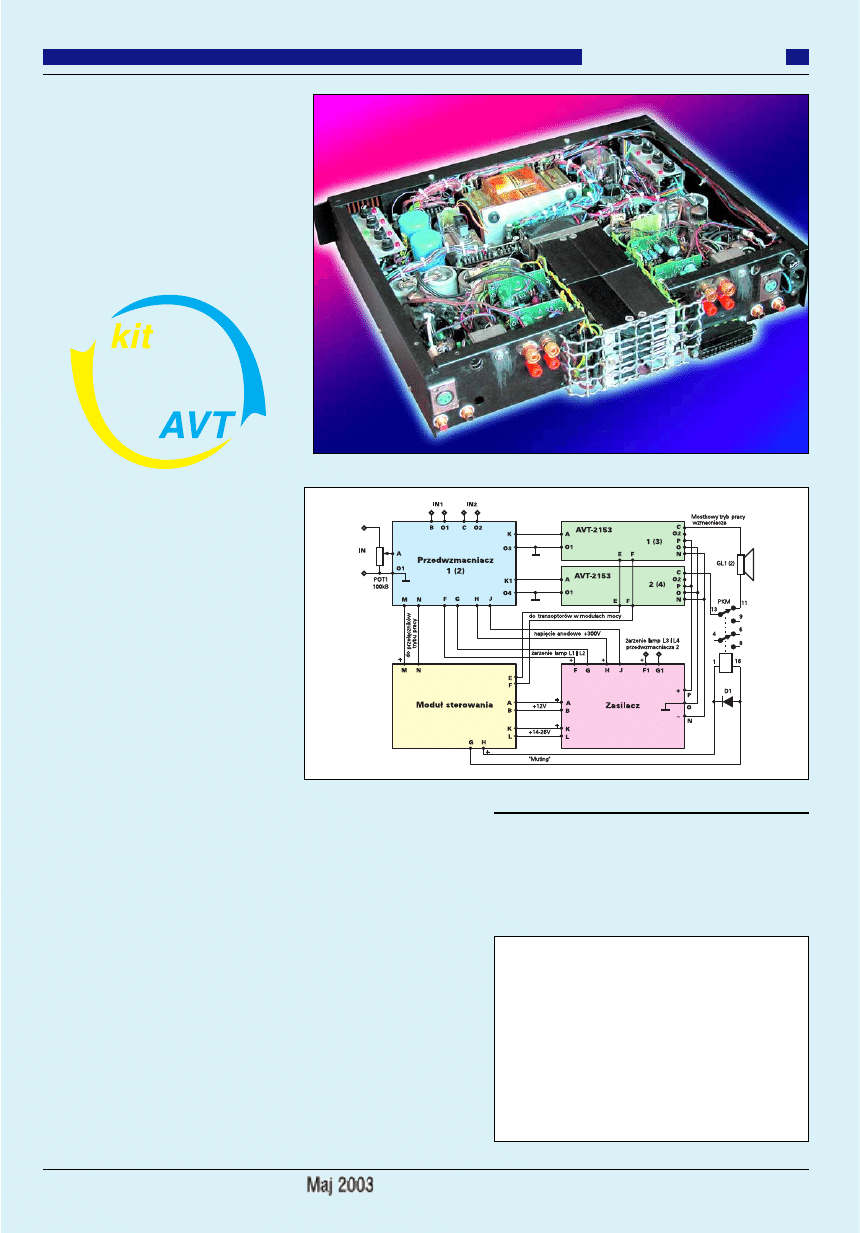
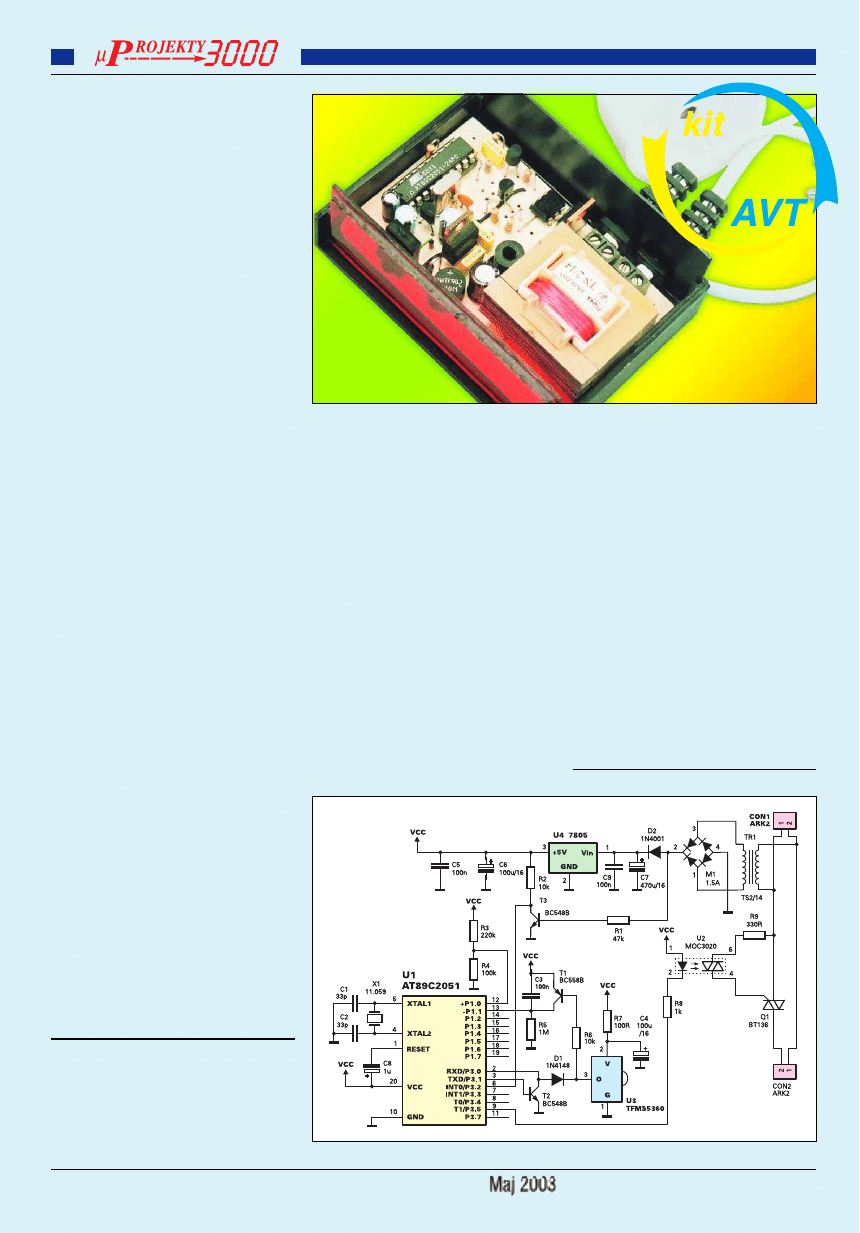
Schemat ideowy układu znajduje się na
rysunku 1. Wszystkie funkcje realizowane
są przez dobrze znany Czytelnikom EdW
procesor 2051 wraz z kilkoma małymi pery-
feriami. Program regulatora w całości do-
stępny jest na stronie internetowej EdW.
Regulacja jasności żarówki jest fazowa,
czyli polega na mniejszym lub większym
opóźnieniu włączenia triaka po przejściu na-
pięcia sieci przez zero. Im większe to
opóźnienie, tym jasność mniejsza. Tranzy-
stor T3 wykrywa momenty przejścia napięcia
sieci przez zero. Jest on zatkany, gdy napię-
cie to nie przekracza 11...12V, co nie jest mo-
że wartością bardzo bliską zeru, ale dla na-
szej lampki takie rozwiązanie jest zupełnie
wystarczające. Pomiary przy użyciu oscylo-
skopu i częstościomierza wykazały, że czas,
przez który na wejściu P3.2 procesora utrzy-
muje się stan wysoki, wynosi ok. 570
µs co da-
je wypełnienie równe 5,7%. Oczywiście czę-
stotliwość tego przebiegu wynosi dokładnie
µ
µ
P
P
3
3
0
0
2
2
4
4
Rys. 1 Schemat ideowy
M
M
i
i
k
k
r
r
o
o
p
p
r
r
o
o
c
c
e
e
s
s
o
o
r
r
o
o
w
w
y
y
z
z
d
d
a
a
l
l
n
n
i
i
e
e
s
s
t
t
e
e
r
r
o
o
w
w
a
a
n
n
y
y
r
r
e
e
g
g
u
u
l
l
a
a
t
t
o
o
r
r
o
o
ś
ś
w
w
i
i
e
e
t
t
l
l
e
e
n
n
i
i
a
a
100Hz. Każdy, kto teraz sądzi, że opadające
zbocze sygnału na P3.2 wywołuje procedurę
obsługi przerwania INT0, jest w błędzie – ta-
ki sposób podłączenia podyktowany został
jedynie wygodą przy projektowaniu płytki
drukowanej. Rozwiązanie polegające na wy-
korzystaniu przerwania INT0 i timera do
odmierzania opóźnienia nieco fałszowałoby
pomiary długości impulsów z pilota, gdyż -
jak sama nazwa wskazuje - przerywałoby te
pomiary dwa razy (INT0 + timer) w każdej
połówce napięcia sieci, za każdym razem, na
co najmniej kilkadziesiąt mikrosekund. Nie
jest to wiele i najprawdopodobniej nie spo-
wodowałoby to problemów, ale ja mimo
wszystko zdecydowałem się na inne rozwią-
zanie pozbawione tej wady, choć niestety
bardzo zajmujące czas procesora.
Otóż zarówno pomiar długości impulsów
z nadajnika IRED, jak i sterowanie fazowe
lampką odbywa się w jednym bardzo czę-
stym przerwaniu Timera0. Występuje ono co
50 cykli, a więc z kwarcem 11.0592MHz da-
je to czas ok. 54
µs. Procedura obsługi tego
przerwania oraz deklaracje stałych i zmien-
nych globalnych a także aliasy dla pinów
procesora znajdują się na listingu 1. Zanim
omówię program - wyjaśnienie. Po pierwsze:
nieznający języka C mogą mieć początkowo
małe problemy nie tyle ze zrozumieniem
istoty działania programu, ile z przestawie-
niem się na inny język programowania. Ze
względu na to, że w programie użyte zostały
jedynie najprostsze elementy języka C, moż-
na się go szybko nauczyć w stopniu wystar-
czającym do zrozumienia kodu, korzystając
z jakiejkolwiek niezłej książki dostępnej na
rynku. Są one nieźle napisane, popularne i ła-
two dostępne. Niewykluczone, że Czytelnicy
znajdą lepsze opracowania. Być może mój
projekt i zaznajomienie się z C stanie się za-
chętą do programowania procesorów właśnie
w tym języku. Posiada on liczne zalety. Język
C, słusznie nazywany asemblerem wysokie-
go poziomu, łączy w sobie swobodę asem-
blera z łatwością pisania i przejrzystością ję-
zyków wysokiego poziomu. Jego składnia do
minimum ogranicza pisaninę, dzięki czemu
kod jest zwięzły i logiczny oraz – co bardzo
ważne – dobrze się kompiluje. Każdy, kto
miał okazję obejrzeć kod napisany w C, po
przekompilowaniu na asembler doceni jego
zwięzłość i szybkość. Do tych wszystkich za-
let dochodzi ścisła standaryzacja C, dzięki
czemu składnia jest taka sama niezależnie od
platformy na jaką piszemy program. Warto
także wspomnieć, że zestaw instrukcji proce-
sorów AVR został przez Atmela stworzony
właśnie z myślą o programowaniu w C. Wię-
cej zachęcać chyba nie muszę... To było po
pierwsze. Po drugie: program napisałem, ko-
rzystając z kompilatora TASKING 8051 De-
mo, którego króciutki opis był w EP10/2001.
Wersję demonstracyjną pakietu można zna-
leźć m.in. na płycie CD-EP 10/2001B. Kod
napisany pod ten kompilator zawiera drobne
różnice w stosunku do np. Keila, polegające
na nieco innych słowach kluczowych okre-
ślających, w której pamięci (EEPROM,
flash, RAM, XRAM, itp.) definiowana jest
zmienna lub stała. Z tego powodu twórcy
kompilatora TASKING dostarczają wraz
z nim plik Keil.h. Plik ten dołączyłem do
programu regulatora. Należy go włączyć do
programu z Keila dyrektywą #include, aby
mógł on być kompilowany pod TASKING.
Odwracając niejako ten plik, można kompi-
lować pod Keilem programy napisane pod
TASKING. Po tej dygresji na temat języka
C wracamy do właściwego opisu regulatora
oświetlenia.
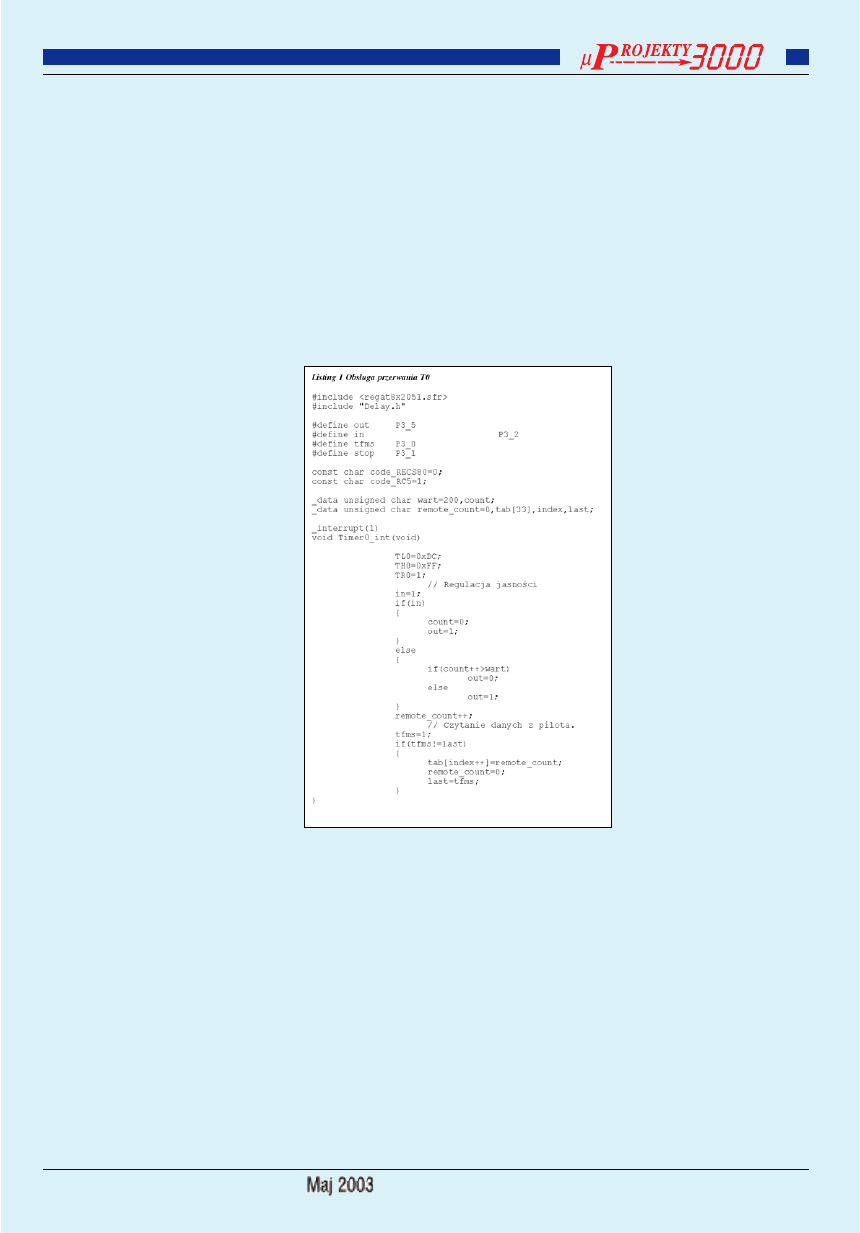
Timer0 pracuje tu w trybie 1. Procedurę
obsługi jego przerwania (listing 1) można
podzielić na dwie części. Pierwsza zajmuje
się regulacją jasności a druga zbieraniem da-
nych z pilota. Zmienna count zerowana jest,
gdy napięcie sieci jest bliskie zeru, czyli gdy
na P3.2 (in) jest stan wysoki. Przez pozosta-
łe ponad 95% czasu zmienna ta jest zwięk-
szana wraz z każdym wystąpieniem przerwa-
nia Timera0 (czyli co ok. 54
µs) i jeśli jej war-
tość przekroczy wartość zmiennej wart – na
wyjście P3.5 (out) podawany jest stan niski,
co powoduje włączenie optotriaka U2 oraz
triaka Q1, a w konsekwencji przepływ prądu
przez żarówkę. Zatem zmienna wart decydu-
je o wartości opóźnienia, po którym – od
przejścia napięcia przez zero – włączana jest
żarówka, a co za tym idzie o jasności jej
świecenia. Im większa wartość zmiennej
wart, tym żarówka świeci słabiej. Uwzglę-
dniając to, że nie 100%, ale ok. 95% czasu
wykorzystujemy do regulacji jasności, a po-
łowa okresu napięcia sieci trwa 10ms – ma-
ksymalna sensowna wartość zmiennej wart
wynosi około 0,95*10000/54=176 (z lekkim
zapasem). A więc regulacja jasności odbywa się
z rozdzielczością ok. 176 kroków (czyli dla
ludzkiego oka zupełnie płynnie). Dla wart więk-
szej lub równej 176 żarówka jest wygaszona.
W drugiej części zmienna remote_count
służy do pomiaru długości trwania kolejnych
impulsów z pilota. Wraz ze zmianą stanu na
wejściu P3.0 (tfms) długość kolejnego impul-
su wpisywana jest do tablicy tab[] oraz
zwiększana jest zmienna index. W tablicy tej
począwszy od indeksu 1 zapisane
są na przemian długości paczek
promieniowania IRED (indeksy
nieparzyste) i przerw między
paczkami (indeksy parzyste).
W komórkach o indeksach 0
i ostatni indeks+1 obecne są war-
tości większe od największej do-
puszczalnej długości paczki bądź
przerwy. Zawartość tej tablicy
analizowana jest później w proce-
durach dekodowania kodów
RECS80, RC5, SONY czy in-
nych, jakie zostaną uwzględnio-
ne. Dzięki temu oddzielamy pro-
ces zbierania danych (który powi-
nien być – i jest – przeprowadzo-
ny bez zakłóceń ze strony innych
przerwań, w czasie rzeczywi-
stym) od procesu ich dekodowa-
nia. Ten ostatni spokojnie może-
my przeprowadzić gdziekolwiek
w programie, w praktycznie do-
wolnym czasie.
Po włączeniu zasilania lub re-
secie program przechodzi do
funkcji main(). Jest to funkcja
standardowa występująca w każ-
dym programie napisanym w ję-
zyku C. Na jej początku konfigu-
rowany jest Timer0 oraz włączane są prze-
rwania. Następnie program wpada w nie-
skończoną pętlę, w której najpierw oczekuje
na pojawienie się impulsów z odbiornika
podczerwieni U3 typu TFMS5360, a po ich
wystąpieniu oczekuje z kolei na zakończenie
transmisji danych z pilota. Ponieważ tablica
tab[] uzupełniana jest automatycznie w prze-
rwaniu Timera0, w funkcji main() nie musi-
my już się o to martwić - wystarczy poczekać
na pojawienie się długiej przerwy między
paczkami impulsów przychodzących z U3,
która oznacza koniec nadawania. Listing 2
przedstawia ten fragment programu. Jak wi-
dać, za koniec transmisji uznawane jest wy-
stąpienie przerwy o długości co najmniej
250*54
µs=13,5ms. Oznacza to, że możemy
stosować piloty, w których zarówno paczki,
jak i przerwy trwają nie więcej niż 13,5ms.
19
Elektronika dla Wszystkich
Listing 1 Obsługa przerwania T0
#include <regat8x2051.sfr>
#include "Delay.h"
#define out
P3_5
#define in
P3_2
#define tfms
P3_0
#define stop
P3_1
const char code_RECS80=0;
const char code_RC5=1;
_data unsigned char wart=200,count;
_data unsigned char remote_count=0,tab[33],index,last;
_interrupt(1)
void Timer0_int(void)
{
TL0=0xDC;
TH0=0xFF;
TR0=1;
// Regulacja jasności
in=1;
if(in)
{
count=0;
out=1;
}
else
{
if(count++>wart)
out=0;
else
out=1;
}
remote_count++;
// Czytanie danych z pilota.
tfms=1;
if(tfms!=last)
{
tab[index++]=remote_count;
remote_count=0;
last=tfms;
}
Większość popularnych kodów, w tym RC5,
SONY i RECS80 spełnia to wymaganie. Wa-
runek index<1 w pętli while został dodany,
bo tab[0] zawsze ma wartość ponad 250, zaś
wyjście z pętli gdy index>30 zapobiega prze-
kroczeniu maksymalnego indeksu tablicy
(i pójściu procesora w przysłowiowe maliny)
w przypadku, gdy długa przerwa nie wystą-
piła dostatecznie szybko – w 30 pierwszych
impulsach. Stanowi to drugie wymaganie co
do kodu pilota – nie więcej niż 30 paczek
i przerw w rozkazie. Gdyby ktoś musiał za-
stosować pilota o czasach impulsów ponad
13ms, powinien zmienić typ zmiennych re-
mote_count, tab[] i innych przechowujących
dane o długości impulsów z pilota na unsi-
gned int. Przy stosowaniu pilota o liczbie im-
pulsów i przerw większej od 30, trzeba zmo-
dyfikować program, zmieniając warunek in-
dex>30 i rozmiar tablicy tab[] w jej deklara-
cji (rozmiar powinien być o 2..3 większy od
liczby w podanym warunku).
Po wyjściu z pętli (czyli zakończeniu
odbioru rozkazu z pilota) tuż za ostatnim im-
pulsem do tablicy wpisywana jest wartość
255. Jest to później wykorzystywane przy re-
alizacji zabezpieczeń przed reakcją na innego
pilota niż RC5 lub RECS80. Oprócz tego na
P3.1 (stop) podawany jest stan wysoki. Po-
woduje to wysterowanie T3 i sprzętowe za-
blokowanie impulsów z odbiornika U3.
Wszystko po to, aby w trakcie dekodowania
ewentualne impulsy podczerwone trafiające do
U3 nie zmieniały zawartości tablicy tab[], co
prowadziłoby do błędów. Wprawdzie wystar-
czyłoby w tym celu dodać jednego if-a w pro-
cedurze Timer0_int, jednak przy tak często
występującym przerwaniu każda możliwość
skrócenia czasu wykonywania tej procedury
jest cenna. Chodzi o to, że to, co jest poza
przerwaniem, nie jest wykonywane ciągle,
lecz swoistymi porcjami. Dla przykładu:
niech czas wykonywania procedury
Timer0_int wynosi 40
µs. Co 54µs procesor
będzie przerywał na 40
µs wykonywanie ca-
łości i skakał będzie do funkcji Timer0_int.
Oznacz to, że reszta programu wykonywana
będzie jedynie przez czas 14
µs w odstępach
54-mikrosekundowych. A więc średnia szyb-
kość pracy będzie prawie czterokrotnie
mniejsza niż przy braku takiego przerwania.
Płynie stąd prosty wniosek, że im krócej wy-
konywana jest funkcja Timer0_int, tym śre-
dnia szybkość wykonywania programu wzra-
sta. Sprzętowa blokada U3 pozwala zao-
szczędzić trochę czasu. Z tego samego
względu w pętli na listingu 2 (i w kilku in-
nych pętlach w programie) obecne jest wy-
wołanie funkcji Delay(1). Wprowadza to nie-
wielkie opóźnienie, co zapobiega „zatkaniu
się” procesora ze względu na bardzo częste
przerwanie Timera0.
Po ustawieniu bitu stop program rozpo-
znaje, z jakim kodem ma do czy-
nienia i - zależnie od długości
drugiego impulsu (tab[2]) - uru-
chamia odpowiednią procedurę
dekodującą – przyjąłem tu próg
2,7ms. Oprócz tego, gdy wywo-
łana zostanie procedura RC5,
następuje lekka modyfikacja
końca tablicy.
Jest tak dlatego,
że w przypadku
gdy najmłodszy
bit komendy RC5
jest równy 0 (ko-
dowany jako
paczka-przerwa),
ostatnia przerwa zlewa się
z następującą po niej długą
(ok. 100ms) przerwą między
całymi rozkazami i należy tę
ostatnią krótką przerwę
sztucznie dopisać do tablicy.
Wadą takiego „siłowego”
rozwiązania jest to, że gdy
komenda jest liczbą nieparzystą (wspomnia-
ny bit ma wartość 1), to modyfikacja tablicy
jest zupełnie niepotrzebna i wręcz pogarsza
jakość danych w niej zawartych. Nie ma to
jednak znaczenia przy dekodowaniu kodu
RC5, bo kończy się ono wraz z odczytaniem
ostatniego, jedenastego bitu rozkazu i nie jest
już analizowane to, co jest dalej. Problem ten
wystąpił, bo przyjąłem format „jeden impuls-
jedna komórka tablicy”. Jest on niejako natu-
ralny dla RECS80 i SONY, bo przekłada się
bezpośrednio na „jedna komórka-jeden bit”.
Dla RC5 jest inaczej. Zastosowana w tym
kodzie transmisja bifazowa sprawia, że dwie
następujące po sobie paczki (zmiana bitu z 1
na 0) lub przerwy (zmiana z 0 na 1) zlewają
się w jedną, dwukrotnie dłuższą paczkę bądź
przerwę zapisaną w jednej komórce tablicy.
I to sprawia, że zdekodowanie RC5 jest tutaj
trudniejsze niż RECS80 czy SONY. Transmi-
sja bifazowa posiada ogromną zaletę przy de-
kodowaniu w formie próbkowania – długość
każdego bitu jest taka sama, niezależnie czy
ma on wartość 1, czy 0. Jednak jeśli najpierw
zbieramy w pamięci dane o długościach im-
pulsów, a potem je dekodujemy, transmisja ta
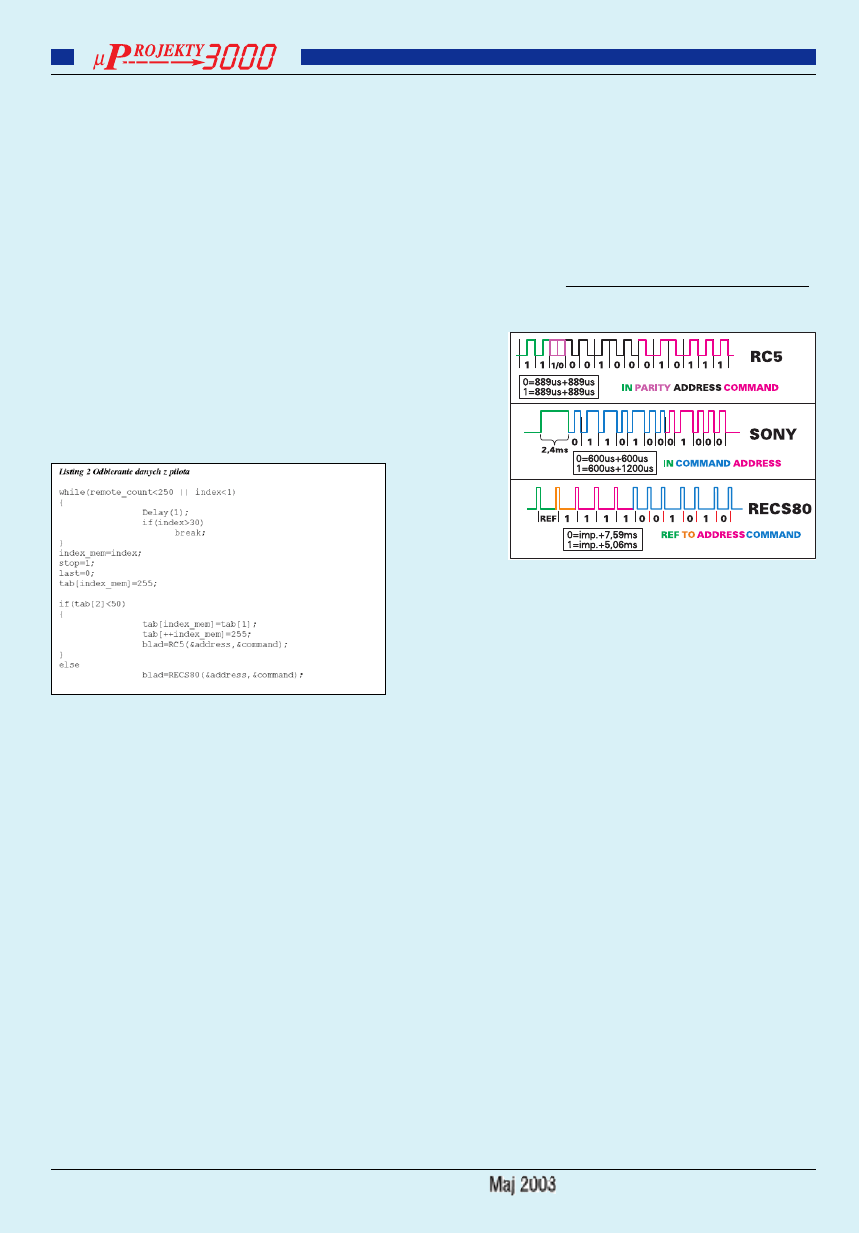
stanowi utrudnienie. Pomocą w przeanalizo-
waniu podanych zależności będzie rysunek 2,
na którym przedstawiłem przykłady zakodo-
wania różnych rozkazów w kodach RC5,
SONY i RECS80. Uwaga! Dla tego ostatnie-
go podany sposób kodowania występuje tyl-
ko dla adresów z przedziału 1...7. Szczegóło-
we informacje można znaleźć w nocie apli-
kacyjnej układu SAA3008 dostępnej m.in. na
internetowych stronach Philipsa. Układ ten
jest nadajnikiem RECS80. W pilotach od te-
lewizorów pracuje zwykle z adresem 7.
Stan wysoki w przebiegach na rysunku 2
oznacza paczkę impulsów podczerwieni
o częstotliwości kilkudziesięciu kHz - naj-
częściej 36, ale bywa że stosowane są inne
częstotliwości np. w kodzie SONY często
wykorzystuje się 40kHz, a w RECS80 38 lub
33kHz, zależnie od zastosowanego kwarcu
w pilocie. Stan niski oznacza przerwę mię-
dzy paczkami. Fragmenty IN są w każdym
rozkazie takie same. W kodzie SONY jest to
impuls o długości 2,4ms a w RC5 sekwencja
impuls-przerwa-impuls lub, jak kto woli,
dwie następujące po sobie jedynki. To samo
dotyczy REF (reference time) i T0. Ten
pierwszy, mający długość odpowiadającą lo-
gicznej jedynce, czyli 7,59ms, już w samym
zamyśle twórców RECS80 służy jako czas
odniesienia i powinien być w tym celu zmie-
rzony na początku dekodowania. Czasy trwa-
nia bitów podaję zgodnie ze specyfikacjami
kodów i notami aplikacyjnymi ich nadajni-
ków, na przykład wspomnianego SAA3008
lub - nadającego kod RC5 - SAA3010. Cza-
sy te zależą od częstotliwości rezonatora ce-
ramicznego zastosowanego w pilocie – poda-
ne wartości odpowiadają pewnej konkretnej
częstotliwości tego elementu podawanej
w notach aplikacyjnych. W pilotach dostęp-
nych w handlu mogą nieznacznie odbiegać
od podanych wartości, bo producenci czasem
stosują rezonatory o innych częstotliwościach
pracy niż podawane w katalogach wspomnia-
nych kostek. Nie są to jednak duże odchyłki,
a poza tym w naszym regulatorze długości
bitów są mierzone, więc nie ma to żadnego
20
Elektronika dla Wszystkich
Listing 2 Odbieranie danych z pilota
while(remote_count<250 || index<1)
{
Delay(1);
if(index>30)
break;
}
index_mem=index;
stop=1;
last=0;
tab[index_mem]=255;
if(tab[2]<50)
{
tab[index_mem]=tab[1];
tab[++index_mem]=255;
blad=RC5(&address,&command);
}
else
blad=RECS80(&address,&command);
Rys2. Przykłady rozkazów w kodach
RC5, SONY i RECS80
znaczenia. Niezależnie od tego, zasady kodo-
wania są zawsze takie same, zgodne z rysun-
kiem 2, czyli np. w kodzie RC5 bity 0 i 1
trwają tyle samo, w SONY paczka w bicie 1
jest dwa razy dłuższa od paczki impulsów
w bicie 0, a w RECS80 długość przerwy ko-
dującej 0 stanowi 2/3 długości przerwy kodu-
jącej 1 itd. Bit PARITY w RC5 zmienia się
wraz z każdym wciśnięciem przycisku w pi-
locie, przyjmując na przemian wartości 1 i 0.
Imp to po prostu krótka paczka impulsów
podczerwieni oddzielająca w
kodzie
RESC80 przerwy, których długości kodują
kolejne bity. Czas jej trwania nie jest zbyt
istotny, wynosi kilka ms.
Każda z procedur dekodujących oprócz
odczytywania komendy i adresu (wpisywane
do zmiennych command i address) sprawdza
czy analizowany kod jest tym, dla którego
dana procedura została napisana. Jeśli tak
jest, zwraca ona wartość 0, w przeciwnym
wypadku zwraca 1, co oznacza odebranie
błędnej transmisji podczerwonej. Wartość ta
wpisywana jest do zmiennej blad. Zabezpie-
czenie przed reakcją na obcy sygnał realizuje
pomocnicza funkcja bit_correct. Opiera się
ono na sprawdzeniu czasów trwania bitów
i ich liczby. Czytelników, którzy przejrzą
kod, zaskoczy pewnie duża tolerancja dla
czasów – dopuszczalne są różnice wynoszą-
ce aż 50% wartości katalogowych. Jest tak
dlatego, że kryterium czasów jest jedynie
kryterium pomocniczym – ma ono za zadanie
z grubsza ocenić, czy analizowany kod jest
właściwy. Główną rolę pełni sprawdzenie
liczby bitów, jakie uda się odczytać w tablicy
tab[] pomiędzy komórką pierwszą i ostatnią,
zawierającą wspomnianą wcześniej wartość
255. Stanowi ona znacznik, którego pozycja
ściśle wiąże się z liczbą odebranych bitów
w odpowiednim kodzie. Ich liczba dla kodu
RC5 musi wynosić dokładnie 11, a dla
RECS80 9, nie licząc IN i PARITY oraz REF
i T0. Okazuje się, że takie zabezpieczenie
jest w praktyce zupełnie wystarczające. Jed-
nak gdyby komuś to nie wystarczało, istnieje
oczywiście możliwość zastosowania bardziej
restrykcyjnych kryteriów oceny, czy to, co
odebrał odbiornik U3 jest kodem RC5 lub
RECS80, czy też nie jest. Można na przykład
oprócz czasów trwania i liczby bitów spraw-
dzać istnienie w tablicy na właściwych miej-
scach stałych fragmentów odpowiednich ko-
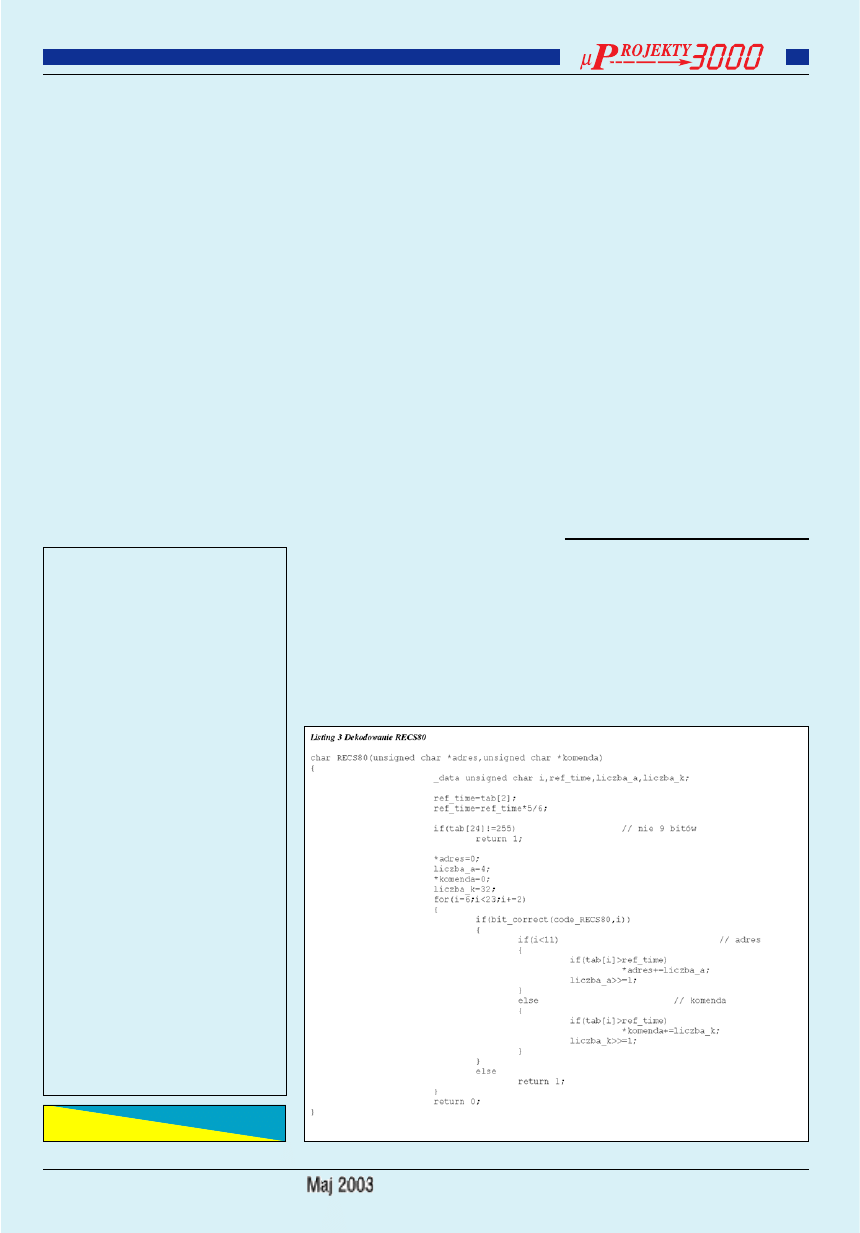
dów, o których napisałem wyżej. Funkcja re-
alizująca dekodowanie RECS80 pokazana
jest na listingu 3. Jak widać, praktycznie ca-
łą pracę wykonuje prościutka pętla for.
Dekodowany jest tylko pierwszy odebrany
rozkaz. Jeśli nie było błędów (blad=0), pro-
cesor albo uczy się (tuż po włączeniu zasila-
nia), albo zmienia jasność czy też włącza/wy-
łącza światło. To ostatnie realizowane jest
przez nadanie zmiennej wart wartości 200.
Włączanie zaś - to przypisanie jej takiej war-
tości, jaką miała tuż przed wygaszeniem
lampki. Płynna zmiana jasności odbywa się
z wykorzystaniem elementów T1,C3,R3...R6.
Stała czasowa R5C3 sprawia, że podczas
trzymania przycisku w pilocie napięcie na
P1.1 jest wyższe niż na nóżce P1.0 (gdzie wy-
nosi ono ok. 1,56V), a co za tym idzie we-
wnętrzny pin P3.6 ma wartość 0. Zastosowa-
nie tych elementów upraszcza nieco program
- jeśli odebrana komenda ma np. zmniejszyć
jasność lampki to, dopóki P3.6 ma wartość 0,
zmienna wart jest inkrementowana co około
20ms. Czas ten określa szybkość zmian ja-
sności. Odmierzany jest przez zliczenie ok.
330 przerwań Timera0 (do liczenia wykorzy-
stana jest bezrobotna na razie zmienna remo-
te_count). Dobrałem go zgodnie z „zasadami
ergonomii” (czytaj: własnym wyczuciem)
i niekoniecznie musi on odpowiadać innym –
w takim wypadku wystarczy kosmetyczna
zmiana programu, z którą raczej nikt nie bę-
dzie miał problemów. Puszczenie przycisku
powoduje powrót na P3.6 stanu 1. Także po
odebraniu innych rozkazów – również nie-
ważnych – procesor czeka, aż przycisk zosta-
nie zwolniony i dopiero wtedy kontynuuje
pracę, czyli zeruje bit stop (P3.1) i czeka na
kolejne rozkazy z pilota. Cykl się zamyka.
Montaż i uruchomienie
Schemat montażowy znajduje się na rysun-
ku 3. Montaż jest klasyczny, musimy tylko
pamiętać o wlutowaniu trzech zworek, w tym
jednej w postaci odcinka izolowanego prze-
wodu łączącego „na przełaj płytki” punkty
A i B. Przed wlutowaniem transformatora
należy zdecydować, w jakiej obudowie zo-
stanie umieszczony nasz regulator. Płytka
zwymiarowana została pod obudowę
21
Elektronika dla Wszystkich
Wykaz elementów
Rezystory:
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47kΩ
R2,R6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220kΩ
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
R7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100Ω
R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ
R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .330Ω
Kondensatory:
C1,C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33pF
C3,C5,C9 . . . . . . . . . . . . . . . . . . . . . .100nF MKT
C4,C6 . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C7 . . . . . . . . . . . . . . . . . . . . . . . . . . .470µF/16V
C8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1µF
Półprzewodniki:
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .89C2051
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .MOC3020
U3 . . . . . . . . . . . . . . . . . . . . . . . . . . . .TFMS5360
U4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7805
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC558B
T2,T3 . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548B
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4001
Q1 . . . . . . . . . . . . . . . . . . . . . . . . . . .BT136-600
M1 . . . . . . . . . . . . . . . . . . . . . . . . . .mostek 1,5A
Inne:
TR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .TS2/14
X1 . . . . . . . . . . . . . . . . . . . . . . . . . . .11,059MHz
CON1,CON2 . . . . . . . . . . . . . . . . . . . . . . . . .ARK2
Obudowa . . . . . . . . . . . . . . . . . . . . . . . . . .KM35
KKoom
mpplleett ppooddzzeessppoołłóóww zz ppłłyyttkkąą jjeesstt ddoossttęęppnnyy
ww ssiieeccii hhaannddlloowweejj AAVVTT jjaakkoo kkiitt sszzkkoollnnyy AAVVTT-33002244
Listing 3 Dekodowanie RECS80
char RECS80(unsigned char *adres,unsigned char *komenda)
{
_data unsigned char i,ref_time,liczba_a,liczba_k;
ref_time=tab[2];
ref_time=ref_time*5/6;
if(tab[24]!=255)
// nie 9 bitów
return 1;
*adres=0;
liczba_a=4;
*komenda=0;
liczba_k=32;
for(i=6;i<23;i+=2)
{
if(bit_correct(code_RECS80,i))
{
if(i<11)
// adres
{
if(tab[i]>ref_time)
*adres+=liczba_a;
liczba_a>>=1;
}
else
// komenda
{
if(tab[i]>ref_time)
*komenda+=liczba_k;
liczba_k>>=1;
}
}
else
return 1;
}
return 0;
}
KM35B lub KM35N. Różnią się one wyso-
kością i tym, że do KM35N trudno spotkać
filtry z przezroczystej barwionej plexi (35
x 83 mm). Bez problemu są natomiast do-
stępne filtry o wysokości 29mm idealnie pa-
sujące do KM35B. Niestety – transformator
nie zmieści się w tak niskiej obudowie. Dla-
tego przed jego wlutowaniem w płytkę nale-
ży ściąć górną część plastikowego karkasu
tego elementu. Należy to zrobić ostrożnie,
aby nie uszkodzić uzwojeń, posługując się
ostrym nożem i niewielkimi szczypcami
bocznymi. Jak dowodzi model, po takiej
przeróbce całość bez problemu wejdzie
w ciasną obudowę KM35B. Jeśli ktoś nie
chce modyfikować transformatora, może
umieścić płytkę w wyższej obudowie, na
przykład KM48N (plus filtr 42 x 83 mm), ale
jest ona ciut przyduża i mniej zgrabna niż
malutka KM35. Po zmontowaniu i włożeniu
w podstawkę zaprogramowanego procesora
układ od razu działa. Po włączeniu zasilania
wystarczy tylko nauczyć go reagować na wy-
brane przyciski pilota. I już. Moc sterowanej
żarówki spokojnie może dochodzić do
150...200W bez konieczności stosowania
(dużego) radiatora na triaku. Na koniec nale-
ży wspomnieć, że regulacja fazowa może
i w wielu przypadkach będzie powodować
powstawanie zakłóceń radioelektrycznych.
Stosunkowo niewielka skuteczność prostych
filtrów RLC (spraw-
dziłem!) i ich duże
rozmiary sprawiły, że
model nie zawiera ta-
kowego. Jeśli ktoś
chce, może taki filtr
zastosować, ale wtedy
obudowa KM35 bę-
dzie stanowczo za ma-
ła. Miłego używania
regulatora życzy
Arkadiusz
Antoniak
22
Elektronika dla Wszystkich
Rys. 3 Schemat montażowy
Ciąg dalszy ze strony 17.
Po upływie mniej więcej minuty (czas ten
potrzebny jest na rozgrzanie włókien żarze-
nia katod lamp) do wejść głównych asyme-
trycznych doprowadzamy z generatora sy-
gnał 1kHz o poziomie 0,775V. Zmierz napię-
cie na wyjściu tłumika R21 - napięcie to po-
winno być identyczne z tym, które zostało
doprowadzone do wejścia przedwzmacnia-
cza. Ślizgacz rezystora nastawnego R23 usta-
wiamy w pozycji środkowej, ale tak, aby na-
pięcie na rezystorach R21 i R23 było jedna-
kowe. Jeśli tak będzie uznajemy wówczas, że
układ mostkowy został wykalibrowany.
Sprawdźmy ponownie wartość napięcia ano-
dowego. Powinno wynosić około 300V. Jeśli
wszystko jest OK, to wtedy wciśnij przycisk
ON. Tym samym pojawi się napięcie na
transoptorach, które uaktywnią płytki mocy,
włączą się jednocześnie przekaźniki głośni-
ków. Potencjometry wejść skręcamy w lewo.
Do wyjść wzmacniacza dołączamy obciąże-
nie (np. żarówkę samochodową) i równole-
gle do niego oscyloskop. W jakim celu?
Po to, aby sprawdzić, czy wzmacniacz się
nie „wzbudza” ponadakustycznie. W przy-
padku wzbudzenia się wzmacniacza żarówka
będzie świecić niezależnie od położenia śli-
zgacza potencjometru wejściowego wzmac-
niacza. Stan taki byłby niezwykle groźny dla
zestawów głośnikowych a szczególnie części
wysokotonowych. Jeśli oscyloskop pokaże li-
nię prostą, ponownie doprowadź sygnał o po-
ziomie 0dB.Tym razem żarówka powinna się
zaświecić. Obserwuj wykres na oscyloskopie.
Kształt sinusoidy powinien być „czysty” i nie-
zniekształcony, w przypadku wzbudzenia się
pojawi się charakterystyczna obwiednia towa-
rzysząca sinusoidzie. Przyczyna wzbudzeń mo-
że leżeć w błędnym połączeniu mas. Jeśli
wszystko jest w porządku, to do wejść głów-
nych podłączamy kompakt CD a do wyjść
urządzenia głośniki i zaczynamy „ucztę”.
Jeśli chcemy słuchać muzyki czterokana-
łowo, wciskamy przycisk TRYB PRACY
(w trakcie przełączania wzmacniacz się wy-
ciszy automatycznie). Będziesz go musiał
uaktywnić przyciskiem ON (S1). Każdy mo-
duł ma swoje wyjście tzn. przewód „gorący”
i masę. Głośniki mogą być przełączane prze-
kaźnikiem sterowanym napięciem 12V
z przełącznika TRYB PRACY.
Życzę miłych wrażeń przy odsłuchiwaniu
tego wzmacniacza.
Ryszard Ronikier
ronikier@o2.pl
Do redakcji często docierają listy i pytania
związane z cewkami. Większość elektroni-
ków twierdzi, że konstrukcje w.cz. są trudne
do odwzorowania, ponieważ jest w nich za-
zwyczaj po kilka obwodów rezonansowych
LC. Znacznie łatwiej buduje się i uruchamia
takie układy, używając typowych obwodów
w postaci gotowych cewek w tym krajowych
typu 7x7.
Najczęściej zadawane są pytania o okre-
ślanie indukcyjności cewek fabrycznych, jak
również cewek w wykonaniu amator-
skim.
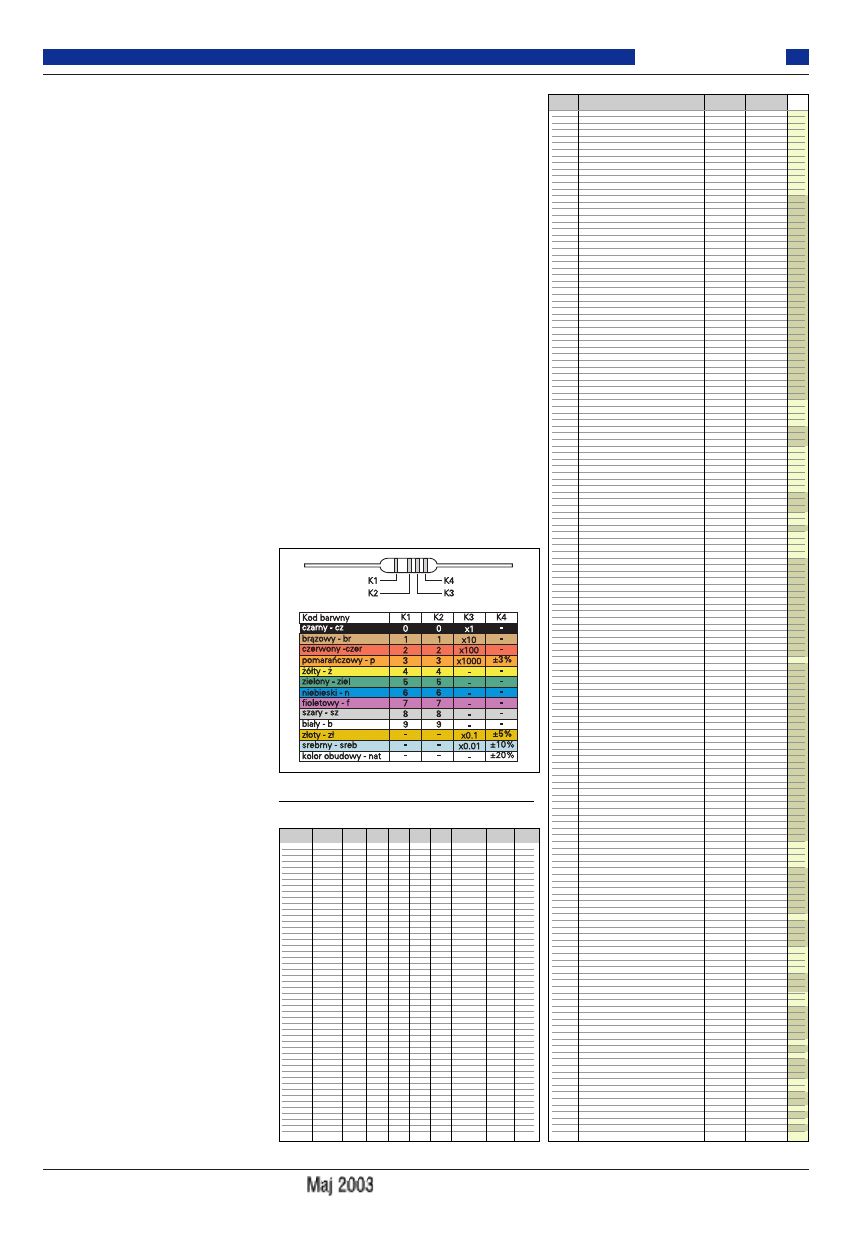
Na rynku można spotkać miniaturowe
cewki wyglądem przypominające rezy-
story 0,25W z różnobarwnym kodem pa-
skowym. Są to dławiki typu CEC o in-
dukcyjności od 0,1
µH do 1mH. Mają one
średnicę 2,7mm oraz długość cewki
6mm (całkowita długość z końcówkami
o średnicy 0,5mm wynosi około 60mm).
Wartość indukcyjności tych podzespo-
łów oznacza się za pomocą czterech na-
malowanych pasków w trzynastu kolo-
rach (K1...K3) oraz tolerancję w % (K4-
pasek skrajny). Wartości dławików o in-
dukcyjnościach od 0,1
µH do 1,5µH wy-
stępują z tolerancją +/-20%, zaś od
1,8uH do 1mH z tolerancją +/- 10%. Ze
względu na nie największą dobroć tych
cewek (Q = 46...75) mogą one być stoso-
wane w obwodach zasilania w urządze-
niach komputerowych, audio-video,
RTV oraz jako obwody rezonansowe
w prostym sprzęcie radioamatorskim.
Na rysunku 1 pokazano sposób od-
czytu wielobarwnego kodu - induk-
cyjnosć w mikrohenrach, zaś w tabelce 1
przydatne inne parametry.
W tabeli 2 przedstawiono najistot-
niejsze parametry obwodów rezonanso-
wych 7x7 łącznie ze schematami połą-
czeń cewek. Obwody te, dawnych Zakła-
dów Materiałów Magnetycznych „Po-
lfer”, są podzespołami o dostrajanej in-
dukcyjności za pośrednictwem rdzeni
ferrytowych. Maksymalne wymiary ze-
wnętrzne obudów cewek w ekranujących
osłonach wynoszą: 7,3x7,7mm (podstawa)
i 12,6mm (wysokość).
Za miesiąc zostaną przedstawione spo-
soby określania indukcyjności cewek jed-
nowarstwowych. Będą zaprezentowane
także proste przystawki służące do pomia-
rów indukcyjności cewek.
Andrzej Janeczek
23
Podstawy
Elektronika dla Wszystkich
Oznacze- CEC L[uH] K1 K2 K3 K4 Q f[MHz] I[mA]
nie R[ ]
R10M
0,10
br
cz
sreb
-
45
25,20
1220
0,08
R12M
0,12
br
czer
sreb
-
45
25,20
1200
0,08
R15M
0,15
br
ziel
sreb
-
50
25,20
1160
0,09
R18M
0,18
br
sz
sreb
-
50
25,20
1120
0,09
R22M
0,22
czer
czer
sreb
-
55
25,20
1080
0,10
R27M
0,27
czer
f
sreb
-
55
25,20
1040
0,10
R33M
0,33
p
p
sreb
-
60
25,20
1000
0,11
R39M
0,39
p
b
sreb
-
60
25,20
960
0,12
R47M
0,47
ż
f
sreb
-
65
25.20
880
0,12
R56M
0,56
ziel
nieb
sreb
-
65
25,20
840
0,13
R68M
0,68
nieb
sz
sreb
-
70
25,20
800
0,15
R82M
8,20
sz
czer
sreb
-
70
25,20
760
0,19
1ROM
1,00
br
cz
zł
-
75
25,20
700
0,20
1R2M
1,20
br
czer
zł
-
65
7,96
660
0,22
1R5M
1,50
br
ziel
zł
-
75
7,96
620
0,23
1R8K
1,80
br
sz
zł
sreb
75
7,96
580
0,25
2RK
2,20
czer
f
zł
sreb
70
7,96
550
0,30
2R7K
2,70
czer
f
zł
sreb
65
7,96
520
0,35
3R3K
3,30
p
p
zł
sreb
80
7,96
500
0,50
3R9K
3,90
p
b
zł
sreb
80
7,96
490
0,60
4R7K
4,70
ż
f
zł
sreb
80
7,96
430
1,00
5R6K
5,60
ziel
nieb
zł
sreb
80
7,96
420
1,00
6R8K
6,80
nieb
sz
zł
sreb
80
7,96
380
1,10
8R2K
8,20
sz
czer
zł
sreb
80
7,96
340
1,20
100K
10,00
br
cz
cz
sreb
75
7,96
320
1,30
120K
12,00
br
czer
cz
sreb
65
2,52
300
1,50
150K
15,00
br
ziel
cz
sreb
65
2,52
290
1,70
180K
18,00
br
sz
cz
sreb
70
2,52
270
1,80
220K
22,00
czer
czer
cz
sreb
70
2,52
240
2,00
270K
27,00
czer
f
cz
sreb
70
2,52
230
2,20
330K
33,00
p
p
cz
sreb
70
2,52
220
2,40
390K
39,00
p
b
cz
sreb
65
2,52
210
2,60
470K
47,00
ż
f
cz
sreb
65
2,52
200
2,70
560K
56,00
ziel
nieb
cz
sreb
65
2,52
190
3,00
680K
68,00
nieb
sz
cz
sreb
60
2,52
180
3,30
820K
82,00
sz
czer
cz
sreb
60
2,52
180
3,70
101K
100,00
br
cz
br
sreb
55
2,52
160
4,20
121K
120,00
br
czer
br
sreb
55
0,796
140
5,00
151K
150,00
br
ziel
br
sreb
55
0,796
140
5,50
181K
180,00
br
sz
br
sreb
55
0,796
130
8,50
221K
220,00
czer
czer
br
sreb
55
0,796
110
9,50
271K
270,00
czer
f
br
sreb
55
0,796
100
10,50
331K
330,00
p
p
br
sreb
60
0,796
90
11,50
391K
390,00
p
b
br
sreb
50
0,796
80
18,50
471K
470,00
ż
f
br
sreb
50
0,796
80
22,00
561
560,00
ziel
nieb
br
sreb
50
0,796
65
24,00
681K
680,00
nieb
sz
br
sreb
50
0,796
55
26,00
821K
820,00
sz
czer
br
sreb
50
0,796
50
28,00
102K
1000,00
br
cz
czer
sreb
50
0,796
50
33,00
Rys. 1
Tabela 1
Oznacze-
nie7x7
Zastosowanie f [MHz] L [uH]
102
Cew. filtru pasmowego
0,465
72,8
108
Cew. - pułapka 30MHz obw. wejść. 15
0,465
64,8
131
Cew. - pułapka 41,5MHz lub filtr pasmowy
0,465
17,3
230
Cew. filtru pasmowego
10,7
0,72
311
Cew. - pułapka 31,5MHz
0,2
762,0
1
313
Cew. - pułapka 39,5MHz
1,0
390,0
314
Cew. do ARcz.
1,0
177,0
315
Cew. p.cz. AM
0,6
343,0
319
Cew. do systemu INFO
1,0
43,7
320
Cew. pułapka 6,5MHz ow. fonii
1,0
79,7
408
Cew. detektora ARcz
3,0
46,8
409
Obw. filtru p.cz. AM
6
5,85
421
Obw. p.cz. FM
6
1,85
425
Obw. det. kondycyjnego p.cz. FM
6
1,53
2
124
Cew. obw. det. AM
0,465
122,0
125
Cew. filtru p.cz. AM pierw.
0,465
25,2
133
Cew. filtru p.cz. AM wtór.
0,465
55,6
134
Cew. filtru p.cz. FM wtór.
0,465
123,0
140
Cew. filtru p.cz. FM
0,465
5850
235
Cew.p.cz. FM
10,7
0,39
323
Cew. p.cz. FM
1,0
187,0
325
Cew. filtru p.cz. AM
1,0
84,0
413
Cew. filtru p.cz. AM z rez. cer.
6
22,5
420
Cew. filtru p.cz. AM z rez. cer.
6
2,93
426a
Cew. osc. f. dł.
10,7
2,90
427A
Cew. osc. f. śr.
15
1,0
434A
Obw. det. FM pierw.
6
7,0
435A
Obw. det. FM pierw.
6
4,45
437A
Obw. det. FM wtór.
10,7
1,80
440
Obw. det. FM wtór.
6
3,7
451
Obw. p.cz. FM
6
0,61
452
Cew. filtru p.cz. AM z rez. cer.
6
3,11
453
Cew. obw. det. AM
6
4,26
457
Cew. filtru p.cz. AM z rez. cer. wtór.
15
1,15
501
Cew. filtru p.cz. AM z rez. cer.
6
1,5
506A
Cew. filtru p.cz. AM z rez. cer. pierw.
15
0,61
507A
Cew. filtru p.cz. AM z rez. cer. wtór.
15
0,80
508
Cew. obw. det. FM wtór.
30
0,49
509
Cew. obw. det. FM pierw.
1,4
510
Cew. p.cz. FM
15
1,05
511
Cew. osc. f.śr.
30
0,70
512
Cew. osc. f.śr.
15
2,61
513
Cew. osc. f. dł
30
0,62
515
Cew. osc. f. dł.
15
0,94
139
Cewka osc. f. dł.
0,465
468,0
3
326
Cew. osc. f. kr.
0,2
4216,0
450
Obw. filtru p.cz. FM
6
9,25
516
Cew. filtru pasmowego
15
1,02
132
Cew. - pułapka 30MHz obw. wejść. 15
0,465
731,0
4
233
Cew. - pułapka 41,5MHz lub filtr pasmowy
10,7
1,25
237
Cew. filtru pasmowego
10,7
2,69
103
Cew. - pułapka 31,5MHz
0,465
72,8
5
115
Cew. - pułapka 39,5MHz
0,465
588,0
116
Cew. do ARcz.
0,465
601,0
204
Cew. p.cz. AM
10,7
1,36
217
Cew. do systemu INFO
10,7
1,09
227
Cew. pułapka 6,5MHz ow. fonii
10,7
2,27
229
Cew. detektora ARcz
10,7
1,80
101
Obw. filtru p.cz. AM
0465
72,8
6
104
Obw. p.cz. FM
0,465
116,0
105
Obw. det. kondycyjnego p.cz. FM
0,465
72,8
317
Cew. obw. det. AM
1,0
347,0
7
318
Cew. filtru p.cz. AM pierw.
1,0
101,0
210
Cew. filtru p.cz. AM wtór.
10,7
2,43
8
202
Cew. filtru p.cz. FM wtór.
10,7
2,43
9
203
Cew. filtru p.cz. FM
10,7
3,95
208
Cew.p.cz. FM
10,7
3,95
226
Cew. p.cz. FM
10,7
2,43
113
Cew. filtru p.cz. AM
0,465
408
10
114
Cew. filtru p.cz. AM z rez. cer.
0,465
122,0
117
Cew. filtru p.cz. AM z rez. cer.
0,465
585,0
118
Cew. osc. f. dł.
0,465
585,0
122
Cew. osc. f. śr.
0,465
358,0
123
Obw. det. FM pierw.
0,465
408,0
218
Obw. det. FM pierw.
10,7
4,18
219
Obw. det. FM wtór.
10,7
6,71
228
Obw. det. FM wtór.
10,7
3,76
301
Obw. p.cz. FM
1,0
168,0
302
Cew. filtru p.cz. AM z rez. cer.
1,0
120,0
303
Cew. obw. det. AM
0,6
163,0
304
Cew. filtru p.cz. AM z rez. cer. wtór.
0,6
226,0
401
Cew. filtru p.cz. AM z rez. cer.
6,0
4,5
403
Cew. filtru p.cz. AM z rez. cer. pierw.
6,0
6,4
201
Cew. filtru p.cz. AM z rez. cer. wtór.
10,7
2,43
11
205
Cew. obw. p.cz. AM
10,7
2,43
12
119
Cew. detektora AM
0,465
35,4
129
Cew. filtru p.cz. FM
0,465
25,2
135
Cew. filtru p.cz. FM
0,465
116,0
137
Cewka p.cz. FM
0,465
249,0
220
Cew. osc. f. śr.
10,7
1,09
232
Cew. filtru p.cz.
10,7
1,03
236
Cew. osc. f. dł.
10,7
1,38
329
Cew. osc. f. dł.
1,2
145,0
332
Cew. osc. f. dł.
1,0
33,7
333
Cew. osc. f. dł.
0,6
195,2
334
Cew. obw. wejść. f. kr.
1,0
266,3
336
Cew. obw. wejść. f. kr
0,6
234,2
337
Cew. filtru p.cz.
1,0
180,7
426
Cew. obw. wejść f. kr.
10,7
2,90
427
Cew. obw. wejść. f. kr.
15
1,0
433
Cew. obw. wejsć. f. kr.
6
11,3
434
Cew. obw. częst. różnicowej
6
7,0
435
Cew. osc. 49m-16m
6
4,95
437
Cew. - pułapka częst. różnicowej
10,7
1,80
441
Cew. obw. wejść. f. kr.
6
3,7
458
Cew, obw. wejść. f. kr.
15
0,79
459
Obwód referencyjny ukł. scalonego
6
9,37
506
Cew. detektora wizji
15
0,61
507
Cew. reg. gramofonu
15
0,80
514
Cew. osc. f. kr.
30
0,70
518
Cew. filtru p.cz.-tor wizji
15
0,32
330
Cew. osc. II mieszacza
0,6
439,2
13
436
Cew. osc. f. kr.
3
25,5
517
Cew. osc. f. kr.
15
1,02
454
Cew. osc. f. kr.
6
3,82
444
Cew. osc. f. kr.
10,7
1,3
14
445
Cew. osc. f. kr.
10,7
2,45
446
Cew. osc. f. kr.
10,7
1,97
447
Cew. osc. f. kr.
15
1,50
448
Obw. filtru p.cz. AM
15
0,86
504
Obw. filtru p.cz. FM
15
0,62
505
Obw. det. FM pierw.
15
0,48
126
Cew. filtru p.cz. FM
0,465
1158,0
15
221
Obw. p.cz. FM
10,7
2,11
16
222
Obw. filtru p.cz. AM
10,7
2,43
231
Obw. det. AM
10,7
2,11
234
Obw. filtru p.cz. AM
10,7
2,69
120
Obw. det. FM wtór.
0,465
1158,0
17
121
Cew. filtru p.cz. AM pierw.
0,465
731
138
Cew. filtru p.cz. AM
0,465
1136,0
223
Cew. filtru p.cz. FM
10,7
5,60
106
Cew. obw. p.cz. AM
0,465
64,8
18
127
Cew. detektora AM
0,465
17,3
216
Cew. filtru p.cz. FM
10,7
2,07
422
Cew. obw. wejść.
6
6,4
19
107
Cew. filtru p.cz. AM wtór.
0,465
123,0
305
Cew. filtru wejść. f. dł. wtór.
0,2
3720,0
20
307
Cew. filtru wejść. f. śr. II wtór.
1,0
113.0
309
Cew. filtru wejść. f. śr. I pierw.
0,6
360,0
308
Cew. filtru wejść. f. śr. II pierw.
1,0
113,0
316
Cew. filtru wejść. f. dł. pierw.
0,2
3720,0
110
Cew. obw. det. AM pierw.
0,465
54,3
21
109
Cew. obw. det. AM wtór.
0,465
64,8
22
111
Cew. obw. det. AM wtór.
0,465
116,0
23
310
Cew. osc. f. śr. I
1,0
124,0
24
312
Cew. osc. f. dł.
1,0
261,0
410
Cew. osc. f. śr. II
3
70,3
405
Obw. filtru wejść. f. kr. (49m) wtór.
6,0
6,2
25
406
Obw. filtru wejść. f. kr. (49m) pierw.
6,0
6,0
211
Obw. filtru p.cz. FM pierw.
10,7
2,43
26
212
Obw. filtru p.cz. FM wtór.
10,7
3,95
207
Obw. filtru p.cz. FM wtór.
10,7
2,43
27
215
Obw. filtru p.cz. FM ew. pierw.
10,7
2,43
28
213
Obw. det. FM pierw.
10,7
2,43
29
407
Obw. osc. f. kr. (49m)
6,0
5,0
30
214
Obw. det. FM wtór.
10,7
3,95
31
J
J
a
a
k
k
o
o
k
k
r
r
e
e
ś
ś
l
l
i
i
ć
ć
i
i
n
n
d
d
u
u
k
k
c
c
y
y
j
j
n
n
o
o
ś
ś
ć
ć
c
c
e
e
w
w
e
e
k
k
część 1
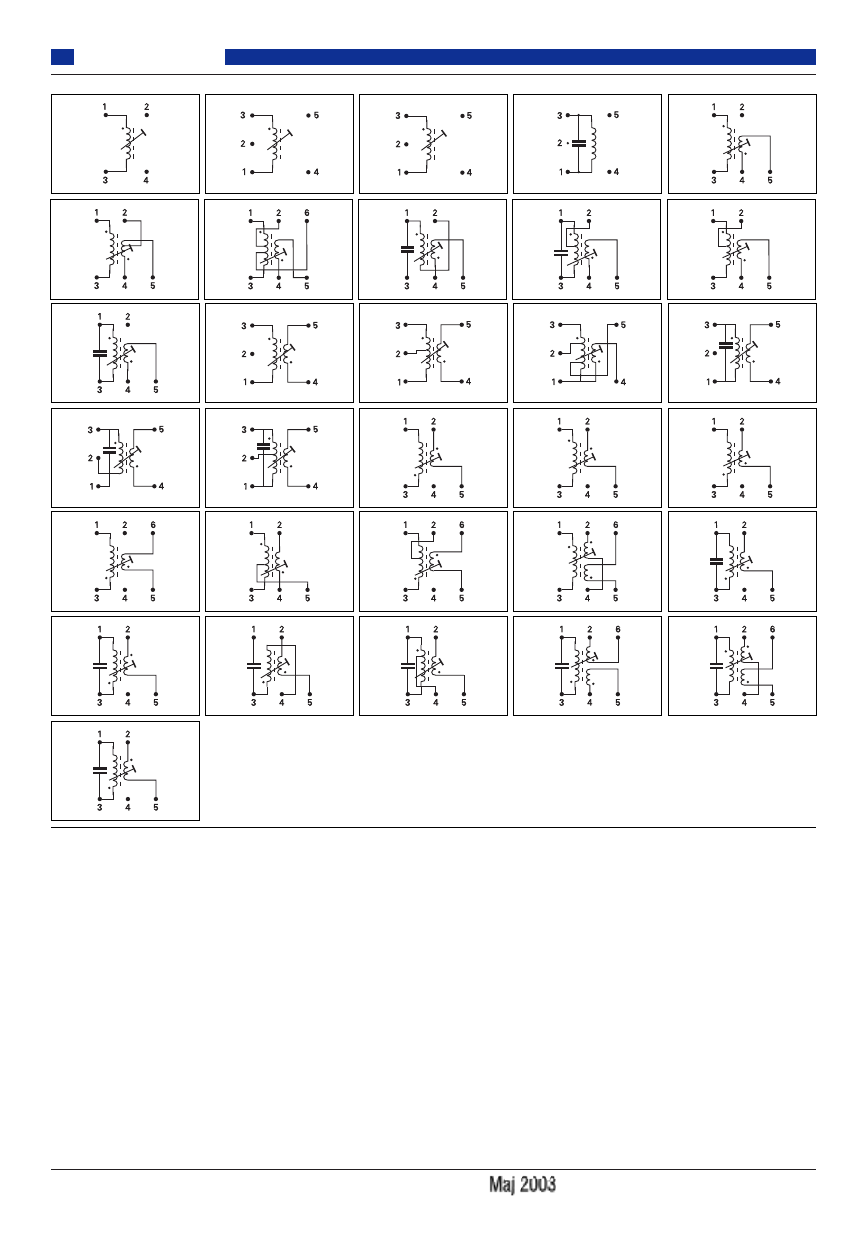
24
Podstawy
Elektronika dla Wszystkich
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
31
27
28
29
30
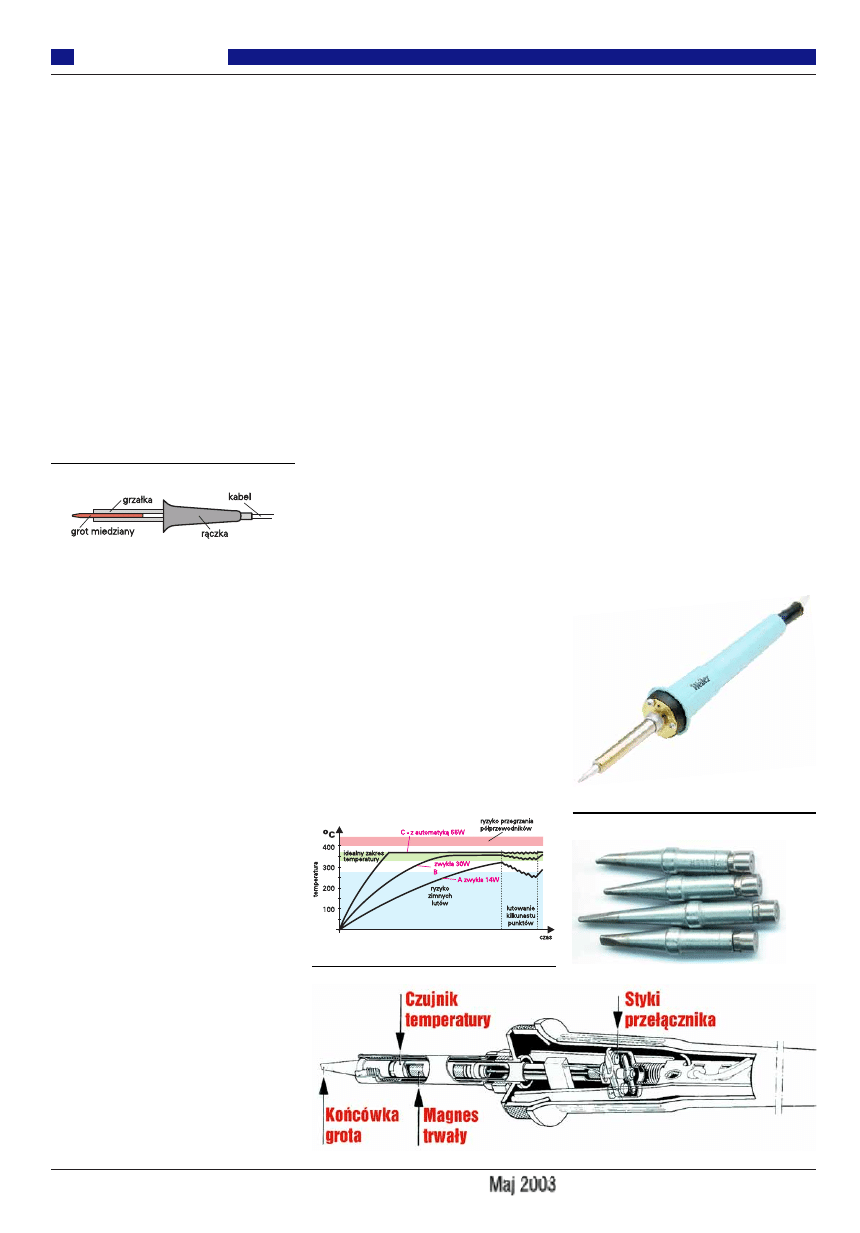
26
Elektronika dla Wszystkich
Podstawy
Lutownice ręczne
Budowę klasycznej lutownicy elektrycznej
pokazuje rysunek 5. O właściwościach de-
cyduje zarówno moc grzałki, jak i skutecz-
ność przekazywania ciepła z grzałki do koń-
cówki grota i dalej do lutu i elementów. Nig-
dy ten przepływ nie jest idealny. W efekcie
tylko część mocy grzałki jest dostarczana do
końcówki grota. Inaczej jest w przypadku
najnowszych urządzeń lutowniczych. Na
przykład w stacjach TW 100 i HW 100 firmy
PACE element grzejny i grot połączono w je-
den zespół, zapewniający nieosiągalną dla
innych urządzeń szybkość reakcji na zapo-
trzebowanie cieplne punktu lutowniczego.
Wbrew pozorom, temperatura grota nie
zawsze jest wprost proporcjonalna do mocy
grzałki. Mała grzałka może zapewnić taką
samą temperaturę grota, jak duża w większej
lutownicy – po prostu inny będzie rozkład
strat ciepła. Ważna różnica ujawni się jednak
podczas lutowania. Należy też mieć świado-
mość, że na drodze od grzałki do końcówki
grota występuje pewien opór cieplny
i w efekcie podczas lutowania, gdy lut i ele-
menty odbierają ciepło z grota, jego tempera-
tura obniża się. Przedstawione powyżej naj-
nowsze stacje lutownicze PACE zapewniają
w tym zakresie wyjątkowo krótki czas osią-
gnięcia ustawionej temperatury na grocie.
W małej lutownicy z grzałką o małej mocy
spadek temperatury podczas lutowania kolej-
nych punktów będzie znaczny. W lutownicy
z grzałką o większej mocy spadek temperatu-
ry będzie mniejszy. I to jest istotny argument
na rzecz lutownic o mocy ok. 30W (25...35W).
Należy pamiętać, że zbyt duża temperatu-
ra grota podczas lutowania jest groźna dla
elementów. Lokalne naprężenia podczas
podgrzewania mogą doprowadzić do pęk-
nięć, rozhermetyzowania obudowy, uszko-
dzenia połączeń, a nawet półprzewodnikowej
struktury.
Z kolei zbyt niska temperatura uniemożli-
wi powstanie prawidłowych połączeń – efek-
tem będą tak zwane zimne luty.
Ponadto do uzyskania optymalnego rezul-
tatu przy lutowaniu różnych elementów nale-
żałoby stosować różne temperatury grota.
Nie zapewnią tego proste lutownice. Aby
osiągnąć i utrzymywać zadaną temperaturę,
wymyślono różne rozwiązania. Profesjonalne
i półprofesjonalne lutownice z układem regu-
lacji mają moc dobraną ze znacznym zapa-
sem (40...60W). Podczas normalnej pracy nie
jest wykorzystywana cała dostępna moc. Za-
pas mocy jest korzystny, ponieważ pozwala
szybko osiągnąć zadaną temperaturę, a także
utrzymać ją nawet w niesprzyjających wa-
runkach, na przykład przy obniżeniu napięcia
sieci czy przy dodatkowych chłodzeniu (np.
na wolnym powietrzu podczas wiatru). Ważne
informacje zawiera rysunek 6. Pokazuje on
zakresy optymalnych i niedopuszczalnych
temperatur. Zaznaczone są też przykładowe
charakterystyki trzech lutownic: A – zwykłej
miniaturowej o mocy 14W, B – zwykłej
o mocy 30W i C – z automatyką (ze stabili-
zacją temperatury) o mocy 55W. Mała 14-
watowa lutownica po pewnym czasie też roz-
grzeje się do temperatury gwarantującej pra-
widłowe lutowanie. Ale przy ciągłym lutowa-
niu większej liczby połączeń jej temperatura
nadmiernie się obniży. W lutownicy o charak-
terystyce C, mającej zapas mocy i system re-
gulacji spadek temperatury nawet podczas
ciągłego lutowania praktycznie nie występuje.
Opracowano różne systemy regulacji tem-
peratury. Od lat znane i cenione są lutownice
ze stabilizacją magnetyczną firmy Weller.
Budowę takiej lutownicy pokazuje rysunek
7, pochodzący z materiałów reklamowych
firmy Weller, a fotografia 6 przedstawia naj-
popularniejszego przedstawiciela tej rodziny,
lutownicę TCP-24, zasilaną napięciem 24V.
Regulacja opiera się na utracie właściwości
magnetycznych ferromagnetyka po osiągnię-
ciu tzw. punktu Curie, czyli temperatury cha-
rakterystycznej dla danego materiału magne-
tycznego. Kawałek takiego materiału magne-
tycznego jest częścią grota – patrz fotografia
7. W stanie zimnym magnes czujnika jest
przyciągnięty do tego kawałka ferromagne-
tyka i styki są zwarte – przez grzałkę płynie
prąd. Gdy temperatura grota wzrośnie powy-
żej punktu Curie, magnes przestaje przycią-
gać ferromagnetyk, styki zostają rozwarte
i grzałka przestaje grzać. Temperatura waha
się w niewielkich granicach, zapewniając
optymalne warunki lutowania. O wartości
temperatury decyduje wspomniany kawałek
ferromagnetyka będący częścią grota. Aby
zmienić temperaturę, trzeba więc wymienić
grot na inny. Najczęściej wykorzystuje się
groty oznaczone liczbą 7 o temperaturze no-
minalnej 370
o
C, rzadziej z numerem 6
(310
o
C) czy 8 (400
o
C).
Obecnie coraz częściej spotyka się stacje
lutownicze z płynną regulacją temperatury.
Regulacja polegająca tylko na zmianie mocy
grzania to rozwiązanie bardzo słabe, wręcz
Rys. 5
Rys. 6
Rys. 7
Fot. 6
Fot. 7
Wszystko o lutowaniu
część 2
27
Elektronika dla Wszystkich
Podstawy
nie do przyjęcia. Większość stacji lutowni-
czych tego typu wykorzystuje czujnik (ter-
moparę) umieszczony wewnątrz lutownicy,
mierzący rzeczywistą temperaturę grota.
Dopiero wykorzystanie czujnika temperatury
i obwodu sprzężenia zwrotnego pozwala
osiągnąć bardzo małe wahania temperatury
i umożliwia ustawienie dowolnej temperatury.
Fotografia 8 pokazuje popularną i tanią
stację lutowniczą tego typu - ST 25E firmy
PACE, z analogową regulacją i stabilizacją
temperatury. Jeszcze większą precyzję za-
pewniają stacje z cyfrowym układem zarzą-
dzającym temperaturą np.: PACE ST 45,
która umożliwia stabilizację temperatury
z maksymalną dokładnością ±1
o
C.
Od lat znaczną popularnością cieszą się
lutownice transformatorowe, zwane też pi-
stoletowymi. Fotografia 9 pokazuje taką lu-
townicę. Zasada działania jest prosta. Uzwo-
jenie wtórne transformatora o małym napię-
ciu wyjściowym pracuje praktycznie w wa-
runkach zwarcia. Zwarcie to zapewnia dość
gruby drut miedziany o średnicy 1...1,5mm,
pełniący rolę grota. Duży prąd zwarciowy
przepływający przez drut grota silnie go roz-
grzewa. Moc wydzielana w grocie zależy nie
tylko od grubości drutu, ale też od jakości
styku szyn z drutem grota. Zależnie od jako-
ści styku, temperatura drucianego grota mo-
że zmieniać się w dużych granicach – łatwo
może wzrosnąć ponad 450
o
C albo spaść po-
niżej 300
o
C. Skutkiem nadmiernego wzrostu
jest przepalenie cyny, czyli błyskawiczne pa-
rowanie zawartego w niej topnika; także grot
zbyt zimny nie zagwarantuje pra-
widłowego lutowania.
Choć lutownice transformato-
rowe były i nadal są dość popular-
ne, na pewno nie są optymalne do
precyzyjnych prac z uwagi na cię-
żar i wahania temperatury grota.
Dobrze nadają się natomiast do
sporadycznych prac serwisowych,
zwłaszcza w przypadku więk-
szych elementów.
Spotyka się też lutownice bez-
przewodowe. Bardzo mało są
u nas popularne lutownice z wbu-
dowanymi akumulatorkami. Ich
wadą oprócz ceny są znaczny ciężar i nie-
wielka pojemność akumulatorków. Innym
godnym uwagi rodzajem lutownic bezprze-
wodowych są lutownice gazowe. Paliwem
jest popularny gaz do zapalniczek. Są lekkie,
wygodne, dobrze sprawdzają się także na
wolnym powietrzu, nawet przy wietrze. War-
to mieć taką lutownicę gazową w swoim ar-
senale do prac w terenie oraz jako dodatkową
przy lutowaniu wyjątkowo grubych drutów
czy styków (często wykorzystywane są wte-
dy dwie lutownice jednocześnie).
Ale uwaga, lutownice gazowe są różnej
jakości. Bardzo tanie wersje często okazują
się niezbyt dobre i optymalna okazuje się lu-
townica gazowa dobrej firmy, droższa, za-
pewniająca dobre właściwości i trwałość.
Fotografia 10 pokazuje lutownicę gazową
firmy Potrasol w wersji Professional z oferty
Renexu.
Ostatnio w związku z upo-
wszechnieniem się coraz mniej-
szych elementów SMD spotyka
się coraz więcej lutownic i roz-
lutownic na gorące powietrze,
ściślej na gorący gaz (azot). Są
to narzędzia kosztowne. Mało
używane przez hobbystów stają
się coraz popularniejsze wśród
profesjonalistów. Renex oferuje
bardzo szeroki wybór tego typu
narzędzi od prostych w obsłu-
dze i wyjątkowo atrakcyjnych
cenowo stacji na gorące powie-
trze NEC do bardzo złożonych
systemów PACE, fotografia 11
przedstawia stacje H7 NEC, zaś fotografia
12 Thermoflo 200 firmy PACE.
Ciąg dalszy w następnym numerze EdW.
Zbigniew Orłowski
Fot. 10
Fot. 11
Fot. 12
Fot. 8
Fot. 9
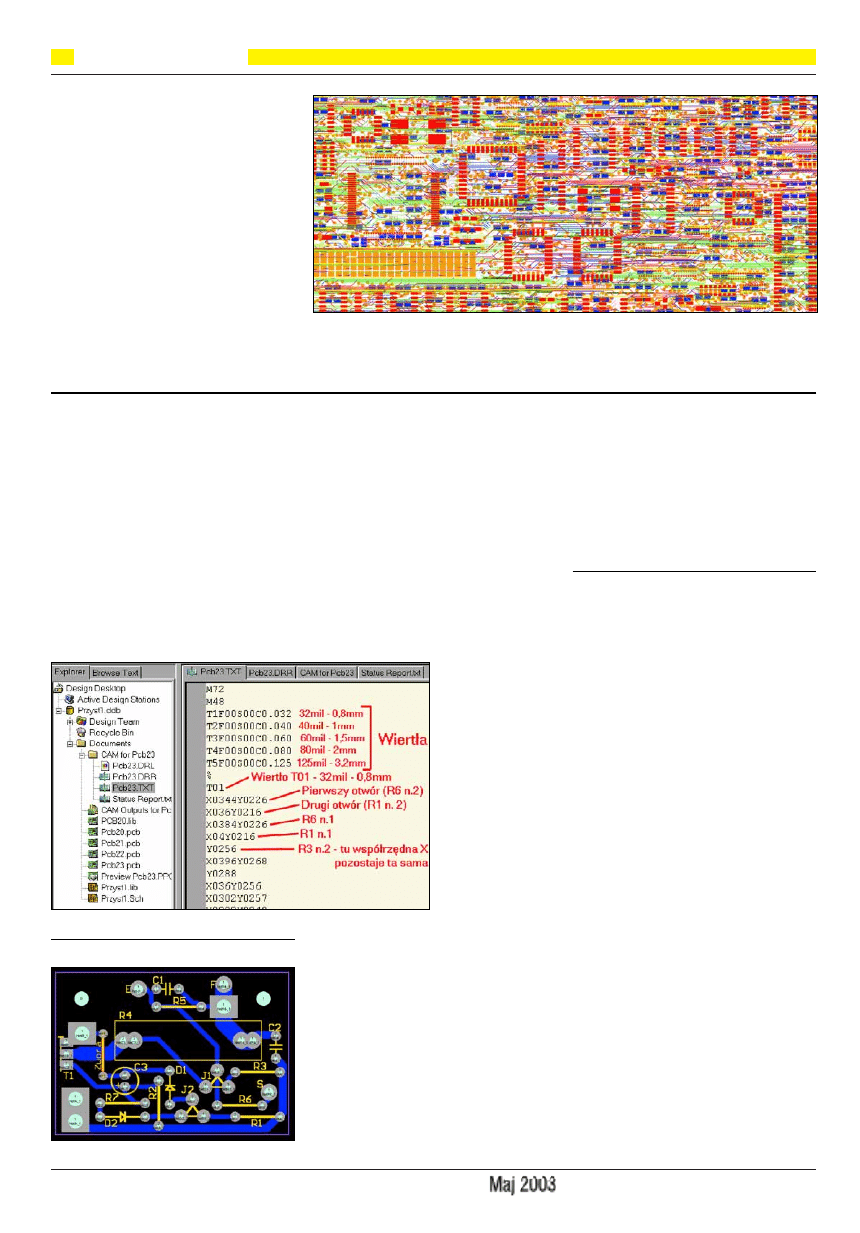
28
Kurs Protela
Elektronika dla Wszystkich
Zacznijmy od odpowiedzi na proste pytanie:
jakie pliki tak naprawdę potrzebne są do wy-
konania płytki drukowanej? W przypadku
płytki jednostronnej w najprostszym przy-
padku wystarczą dwa pliki: jeden do wyko-
nania kliszy z obrazem ścieżek, drugi z infor-
macjami dla automatu wiertarskiego (ewen-
tualnie trzeci do warstwy opisu – TopOver-
lay). W Protelu korzystając z narzędzia CAM
Manager, możesz łatwo wygenerować pliki
dla automatu wiertarskiego. Protel utworzy
trzy pliki z rozszerzeniami:
*.drl – plik binarny „strawny” tylko dla od-
powiedniej maszyny,
*.drr – mały plik tekstowy z informacją o śre-
dnicy wierteł,
*.txt – plik z kompletem informacji w posta-
ci tekstowej.
Rysunek 1 pokazuje początkowy frag-
ment pliku PCB23.TXT, dotyczącego płytki
przystawki z rysunku 2. Dodałem czerwone
komentarze, żebyś przekonał się, że zasada
zapisu jest bardzo prosta. Podane są średnice
(32mil...125mil) pięciu wierteł (T01...T05).
A dalej jest po prostu numer wiertła i współ-
rzędne otworów (a moje czerwone komenta-
rze pokazują, który to otwór). Współrzędne
w osiach X i Y podane są w postaci
„ o s z c z ę d n o ś c i o -
wej”. W zasadzie
każda współrzędna
powinna mieć pięć
cyfr wyrażających
odległość w milsach
(mogłaby być też
podana w milime-
trach). Tak napraw-
dę jest to tak zwany
format 2.3 – format
p i ę c i o c y f r o w y ,
gdzie dwie pierwsze
cyfry to odległość
od punktu zerowego
w pełnych calach,
trzy następne to
część ułamkowa liczby. W ten sposób format
2.3 pozwala określić współrzędne (wymiary)
od zera do 99,999cala z dokładnością do 1
milsa. Zwróć uwagę, że w zastosowanym tu
„oszczędnościowym” sposobie zapisu pomi-
ja się zera z prawej strony. Dlatego zapis:
X036Y0216
oznacza
X02600Y02160
Oprócz pięciocyfrowego formatu 2.3 wy-
korzystywany jest też sześciocyfrowy format
2.4 dający dokładność 0,1mil oraz siedmiocy-
frowy format 2.5 o dokładności 0,01mil.
Zwróć uwagę, że sposób z obcinaniem zer
z prawej strony (trailing zeros) pozwala w wy-
godny sposób korzystać z każdego z trzech opi-
sanych formatów. Wykorzystuje się też sposób
z obcinaniem zer z lewej strony (leading zeros).
W dalsze szczegóły zapisu pliku wiertar-
skiego nie będziemy się wgłębiać, bo zajmie-
my się pokrewnym tematem plików do wy-
konywania klisz. I tu musimy cofnąć się do
zamierzchłej przeszłości.
Klisze
Wykonywanie klisz, zwłaszcza do płytek
dwustronnych i wielowarstwowych, wymaga
dużej dokładności, by po złożeniu wszystkie
warstwy idealnie do siebie pasowały i by nie
było żadnych przesunięć. Problem jest, bo
klisza przygotowana jest nie dla pojedynczej,
małej płytki, ale dla dużej formatki, zawiera-
jącej wiele płytek. Przed laty do wykonywa-
nia takich precyzyjnych klisz wykorzystywa-
no specjalne urządzenie, zwane fotoploterem
wektorowym. Fotoploter to duże, precyzyjne
i bardzo kosztowne urządzenie, działające
podobnie jak klasyczny ploter. Fotoploter
wektorowy zamiast pisaków z tuszem wyko-
rzystuje... plamki świetlne o różnych kształ-
tach i rozmiarach. Zawiera obrotową głowicę
(bęben) ze „slajdami”, czyli różnymi przesło-
nami. Zgodnie z nazwą „rysuje” obraz ście-
żek światłem na specjalnej kliszy fotogra-
ficznej. W sumie działanie fotoplotera jest
zbliżone do działania automatu wiertarskie-
go, tylko zamiast pojedynczych otworów fo-
toploter może zarówno „strzelać światłem”,
by naświetlić pojedyncze punkty, np. punkty
lutownicze, „ciągnąć” linie, przesuwając
plamkę o szerokości ścieżki, a także „malo-
wać” większe obszary za pomocą plamki
o mniejszej średnicy (takie tryby pracy nazy-
wa się odpowiednio flash, stroke i paint). Jak
się słusznie domyślasz, plik do sterowania
fotoploterem jest bardzo podobny do wcze-
śniej omówionego pliku wiertarskiego.
Ważną sprawą w takim fotoploterze jest
liczba dostępnych kształtów i rozmiarów
S
S
p
p
o
o
t
t
k
k
a
a
n
n
i
i
a
a
z
z
P
P
r
r
o
o
t
t
e
e
l
l
e
e
m
m
9
9
9
9
S
S
E
E
Spotkanie 14
Na najbliższych spotkaniach zajmiemy się zaa-
wansowanymi zagadnieniami, związanymi
z przygotowaniem plików produkcyjnych. Wię-
cej miejsca poświęcimy jednak pokrewnemu za-
gadnieniu, które pokaże Ci całą sprawę w zupeł-
nie odmiennym świetle. Pokażę Ci mianowicie,
jak można okrężną drogą przenieść przynajmniej
kluczowe informacje z płytki zaprojektowanej
w programie EAGLE do Protela czy Autotraxa.
Rys. 1
Rys. 2
plamek świetlnych, która wynika z liczby
„slajdów” – przesłon na bębnie. Jeśli dostęp-
na np. jest okrągła plamka o średnicy 100mil,
to można błyskawicznie naświetlić zarówno
punkty lutownicze o tej średnicy, jak i tak
szerokie ścieżki. Jednak do naświetlenia
punktu lub ścieżki o średnicy np. 115mil
trzeba wykorzystać inne, mniejsze plamki
świetlne i „namalować” je stopniowo.
Fotoploter powinien mieć jak najwięcej
kształtów i rozmiarów plamek świetlnych,
nazywanych aperturami. W praktyce każdy
fotoploter działający na opisywanej zasadzie,
czyli fotoploter wektorowy, miał liczbę aper-
tur ograniczoną do najwyżej kilkudziesięciu.
Tym samym program przygotowujący pliki
dla fotoplotera musiał inteligentnie dobrać
sposób naświetlania, by zlecone zadanie zre-
alizować za pomocą apertur dostępnych
w konkretnym fotoploterze, z którego korzy-
stał wytwórca płytek. Programowi takiemu
koniecznie trzeba było podać informacje
o aperturach dostępnych w konkretnym foto-
ploterze. Nawet popularny, stary Autotrax,
czy nawet Easytrax, potrafi stworzyć pliki
dla fotoplotera. A informacje o aperturach
zawarte są w pliku STANDARD.APT (ew.
innych z rozszerzeniem .apt).
Nie chodzi tu oczywiście o wiertła (ozna-
czane T01...), tylko o różne plamki świetlne.
Dla Twojej ciekawości podam, że różne plam-
ki świetlne zazwyczaj oznaczone są D11, D12,
D13,... Rysunek 3 pokazuje kluczowy frag-
ment listy apertur dostarczonej wraz z Autotra-
xem: STANDARD.APT (wstępna część pliku
to komentarz). Zawiera on informacje o 23
„standardowych” aperturach, które tak na-
prawdę wcale nie są standardowe - nie ma
stałego przypisania kształtu i wymiarów do
kodów Dxx. Każdy plik .apt może być inny.
Co ciekawe, D01...D10 zwykle rezerwuje
się nie na oznaczenie plamki świetlnej, tylko
polecenia:
D01 – (draw) włącz
światło przy następ-
nym poleceniu
D02 – (move) wyłącz
światło
D03 – (flash) po na-
stępnej operacji błyśnij.
Znak gwiazdki *
(rzadziej dolara $) roz-
dziela poszczególne
rozkazy. Kody X,
Y określają współrzęd-
ne. Rysunek 4 pokazu-
je przykładowe pole-
cenia z pliku fotoplote-
ra (z moim czerwonym
komentarzem). W pliku
możesz także znaleźć
tzw. kody G, np. G54
(przygotuj zmianę narzę-
dzia), G04 (komentarz),
G01, G02, G03, F74,
G75 (rysowanie linii pro-
stych, łuków i okręgów), G91, G92 (współ-
rzędne bezwzględne i przyrostowe), kody M,
np. M02 (koniec rysowania), kody I oraz
J (przy rysowaniu łuków). Rysunek 5 poka-
zuje początek pliku dla fotoplotera do naryso-
wania ścieżek płytki Prostej centralki alar-
mowej zamieszczonej w numerze 10/2002,
wygenerowany za pomocą Autotraxa przy
wykorzystaniu STANDARD.APT. Natomiast
rysunek 6 pokazuje początek pliku wygene-
rowanego przez Protela przy domyślnych
ustawieniach (format 2.3, obcięcie zer z lewej
strony). Protel sam wygenerował listę apertur
i umieścił ją w pliku, wykorzystując odmianę
formatu (RS-274X; gdzie X od extended -
rozszerzony), pozwalającą na taką operację.
Ponieważ na początku dominujące znacze-
nie na rynku fotoploterów miała firma Gerber
(Gerber Scientific Instruments Company),
przyjęto nazwę Gerber także dla formatu pli-
ków wyjściowych dla fotoploterów. Ściślej ta-
ki język zapisu (format) nazywa się RS-274.
Dziś w użyciu są różne odmiany standardu:
podstawowy RS-274D i rozszerzony RS-
274X. W każdym razie tak zwane pliki Gerbe-
ra (Gerber files) to pliki dla fotoplotera.
Przypominam: aby wygenerować plik
Gerbera dla fotoplotera wektorowego, trzeba
było poinformować program o dostępnych
aperturach.
Tak było kiedyś i wtedy doświadczeni
projektanci płytek znacznie obniżali koszty
naświetlania, stosując w swoich projektach
punkty i ścieżki, które łatwo można było na-
świetlić za pomocą dostępnych apertur. To
obszerne zagadnienie, którego nie będę oma-
wiał, bo problem... zniknął.
Z czasem zamiast fotoploterów wektoro-
wych z ograniczoną liczbą apertur pojawiły
się bowiem fotoplotery rastrowe, pracujące
na zasadzie podobnej do drukarki laserowej.
Zasada naświetlania kliszy się zmieniła, ale
nie zmienił się format plików Gerbera, wy-
wodzący się z fotoploterów wektorowych.
Nadal w jakiś sposób wykorzystywana jest
lista apertur (którą często zamieszcza się
w pliku roboczym, a nie oddzielnie), a za-
wartość pliku nadal określa współrzędne i ru-
chy plamek świetlnych. Zawsze mamy
w nim współrzędne (w osiach X, Y) oraz in-
formacje dotyczące narzędzi, choć tych na-
rzędzi w fotoploterze rastrowym nie ma.
Fotoploter we-
ktorowy wykonu-
je posłusznie ko-
lejne polecenia
z pliku, natomiast
fotoploter rastro-
wy musi najpierw
„przetłumaczyć”
zapis wektorowy
na postać potrzeb-
ną do naświetlenia
kliszy punkt po
punkcie, linia po
linii, podobnie jak
w drukarce lasero-
wej. Zwróć uwa-
gę, że w fotoplote-
rze rastrowym nie
ma ograniczenia
na liczbę i rozmia-
ry apertur, bo nie
ma rozmaitych
plamek
świetl-
nych. Dlatego
nowsze programy
projektowe mogą
albo po staremu
korzystać z ze-
wnętrznej listy
apertur, albo też
generują własną,
związaną z wymiarami świeconych elementów.
Pamiętaj też, że program, np. Protel czy
Autotrax, dla każdej kliszy musi wytworzyć
oddzielny plik. W przypadku płytki dwustron-
nej są to trzy pliki (ścieżki od strony lutowa-
nia, ścieżki od strony elementów, opis). Zwy-
kle mają one taką sama nazwę i różne rozsze-
rzenia. Nie ma ściśle ustalonych rozszerzeń
dla plików Gerbera poszczególnych warstw.
Twórcy Protela proponują następujące rozsze-
rzenia, nawiązujące do nazw warstw:
Top Overlay.GTO
Bottom Overlay.GBO
Top Layer.GTL
Bottom Layer.GBL
Mid Layer 1.G1
Power Plane 1.GP1
Mechanical Layer 1.GM1
Drill Drawing.GDD
Drill Guide.GDG
Pad Master, Top.GPT
Pad Master, Bottom.GPB
Keep Out Layer.GKO
Tyle na temat plików Gerbera.
Ciąg dalszy na stronie 37.
29
Kurs Protela
Elektronika dla Wszystkich
Rys. 5
Rys. 6
Rys. 3
Rys. 4
30
Elektronika dla Wszystkich
Rozwiązanie zadania powinno zawierać schemat elektryczny i zwięzły opis działania.
Model i schematy montażowe nie są wymagane, ale przysłanie działającego modelu
lub jego fotografii zwiększa szansę na nagrodę.
Ponieważ rozwiązania nadsyłają Czytelnicy o różnym stopniu zaawansowania,
mile widziane jest podanie swego wieku.
Ewentualne listy do redakcji czy spostrzeżenia do erraty powinny być umieszczone
na oddzielnych kartkach, również opatrzonych nazwiskiem i pełnym adresem.
Prace należy nadsyłać w terminie 45 dni od ukazania się numeru EdW
(w przypadku prenumeratorów – od otrzymania pisma pocztą).
S
S
z
z
k
k
o
o
ł
ł
a
a
K
K
o
o
n
n
s
s
t
t
r
r
u
u
k
k
t
t
o
o
r
r
ó
ó
w
w
Oto list będący podstawą kolejnego zadania
Szkoły, nadesłany przez Damiana Zwoliń-
skiego z Dąbrowy Górniczej: Razem z tatą
zastanawialiśmy się ostatnio nad sposobem,
jak zatrzymać obracający się silnik w ściśle
określonej pozycji. Problem polega na tym,
że na pewnej linii produkcyjnej pracuje ma-
szyna, w której na wale napędzanym przez
silnik elektryczny obracają się łopaty kruszą-
ce. Aby maszyna mogła poprawnie pracować
po obróceniu się łopat, muszą się one usta-
wić poziomo.
Należy zaprojektować urządzenie, które
po naciśnięciu przez operatora przycisku
Stop wyłączy silnik, ale tak, by wał ustawić
w potrzebnej pozycji. Należy pamiętać
o pewnej bezwładności wału (i przekładni),
przez co wał przesuwa się o kilka centyme-
trów po wyłączeniu silnika. Największym
problemem będą czujniki, wykrywające poło-
żenie wału i łopat – układ będzie pracował
w ciężkich warunkach (dużo pyłu), więc mo-
że trzeba zastosować dwa czujniki, a układ
powinien poprawnie pracować nawet po ze-
psuciu lub błędnym zadziałaniu jednego
z nich. Ważne, by układ był niezawodny, a je-
śli zawiedzie i wał zostanie ustawiony nie-
prawidłowo, musi to zasygnalizować opera-
torowi. Zadanie polega na opracowaniu spo-
sobu wykrycia położenia i dokładnego za-
trzymania wału.
Może uznacie, że kolejne zadanie naszej
Szkoły jest wyjątkowo nietypowe. Z jednej
strony jest jak najbardziej praktyczne, bo ma
rozwiązać konkretny problem wzięty z życia.
Z drugiej strony rzeczywiście jego przydat-
ność dla przeciętnego uczestnika Szkoły jest
niewielka. Po długim namyśle zdecydowa-
łem się jednak przedstawić ten problem do
rozwiązania i mam nadzieję, że nie zlekce-
ważycie tematu. Ma bowiem uczulić Was na
bardzo, ale to bardzo ważną kwestię – nieza-
wodność. A oto temat zadania:
Zaprojektować system czujnika i ste-
rownika silnika elektrycznego do ma-
szyny kruszącej.
Mam świadomość, że zaprezentowany
opis jest lakoniczny i nie precyzuje szcze-
gółów. Nie szkodzi – daje to szersze pole dla
Waszej pomysłowości. Sam układ ze strony
elektronicznej nie powinien przysporzyć Wam
trudności – można w ciągu pięciu minut nary-
sować stosowny schemat. Kluczową sprawą
będą czujniki – rodzaj, umieszczenie, odpor-
ność na uszkodzenia pod wpływem pyłu i jak
się spodziewam – także okruchów kruszywa.
Damian nadesłał swój list dawno temu
i nie jestem pewien, czy problem jest wciąż
aktualny, czy może już z jakichś względów
nie istnieje. Piszę to dlatego, że tym razem ze
względu na specyfikę tematu nie spodzie-
wam się dużej liczby modeli. Proponuję, że-
byście zwrócili szczególną uwagę na kwestię
niezawodności. Jeśli nawet nie powstanie
model, napiszcie, jakie chcielibyście zastoso-
wać czujniki i jak widzicie problem ich nie-
zawodności.
Oczywiście szanse na upominki i nagrody
mają też prace dotyczące tylko układu ste-
rownika, bez czujników, niemniej najwięcej
punktów i nagrody będzie można zdobyć
właśnie za dobre pomysły niezawodnych
czujników. Serdecznie więc zachęcam do
udziału i w tym zadaniu. Spodziewam się
nieco mniejszej liczby prac, więc każdy
uczestnik ma większą szansę na upominki
i nagrody. Czekam też na propozycje kolej-
nych tematów. Pomysłodawcy wykorzysta-
nych zadań otrzymują nagrody rzeczowe.
Temat zadania 83 brzmiał: Zaprojektować
układ, dzięki któremu pieszy będzie lepiej
widoczny na drodze.
Bardzo się cieszę, że w rozwiązaniu tego
zadania wzięło udział wiele osób. Nadesłali-
ście znakomite, naprawdę interesujące
pomysły i rozwiązania, a także wspaniałe
modele.
Zdecydowana większość uczestników
uznała, iż należy wykorzystać diody LED. Ja
ze swej strony podkreślam, iż wcale nie uwa-
żam, że światełko ostrzegawcze ma być kon-
kurencją eliminującą najróżniejsze odblaski,
co zarzuciło mi dwóch uczestników. Uwa-
żam, że może to być doskonałe uzupełnienie
odblasków. Niemniej jak pisałem w styczniu,
jeśli zaprojektowane światełko ostrzegawcze
ma stanowić konkurencję dla odblasków, na-
leży zastanowić się, jak taki pożyteczny ga-
dżet uczynić bardziej atrakcyjnym. Bo naj-
prostsza mrugająca czerwona lampka do
największych atrakcji chyba już nie należy...
Bardzo się cieszę, że wykazaliście się
w tym względzie pomysłowością, a więk-
szość pomyślała także o konstrukcji zapew-
niającej długotrwałą i wygodną eksploatację.
Rozwiązania teoretyczne
Część prac zawierała ogólne rozważania
o celowości i możliwościach elektronicznych
Zadanie nr 87
Rozwiązanie zadania nr 83
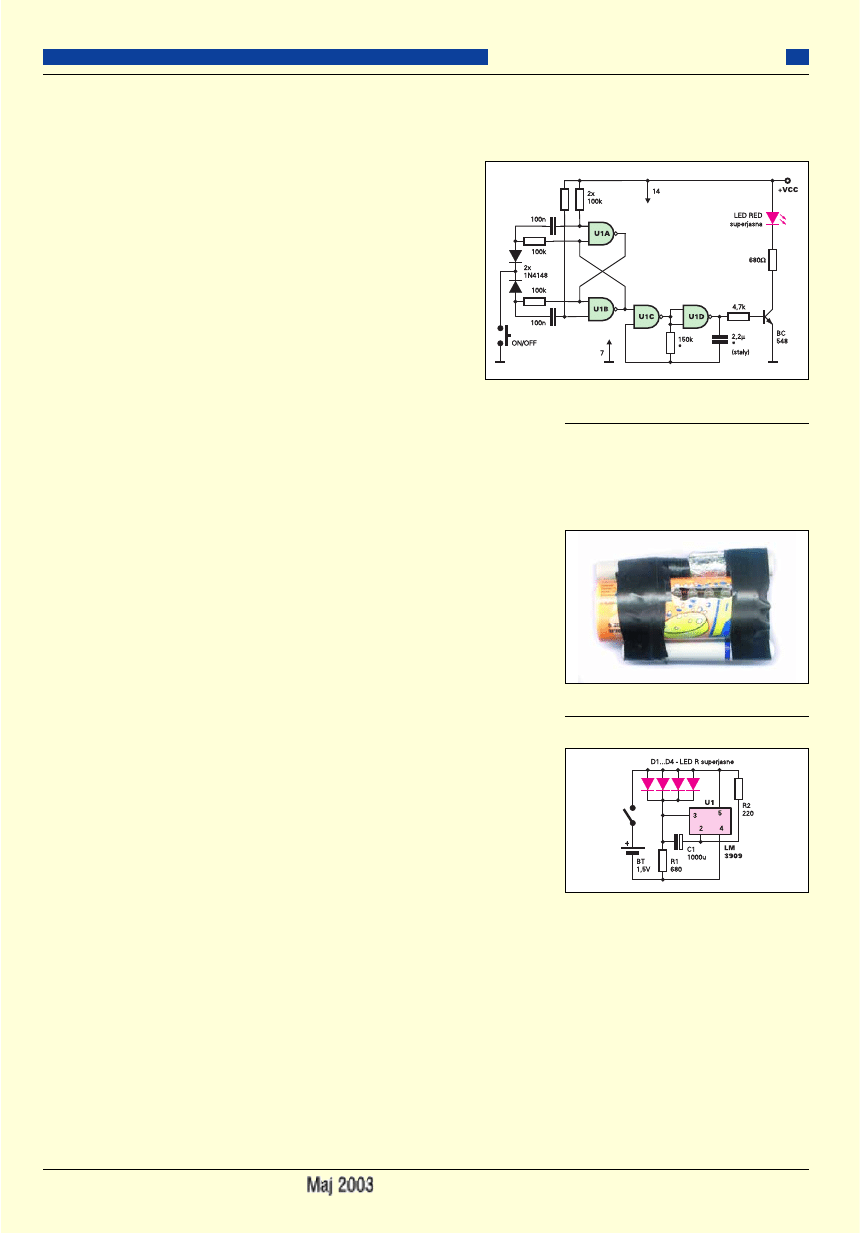
urządzeń mających polepszyć widoczność
pieszego na drodze. Dziękuję za wszystkie te
listy i zawarte w nich opinie i pomysły. Chcę
wspomnieć o kilku Kolegach z tej grupy. Na
przykład Michał Nowakowski z Wrocławia
swego czasu zmontował gotowe kity „bły-
skotki” i zastanawiał się nad możliwością ich
ulepszenia i dostosowania do postawionych
wymagań. Zaproponował nawet wykorzysta-
nie kostek 5400 o szerokim zakresie tempe-
ratur pracy. Zachęcam Autora do dalszych
prób praktycznych, a kostkami 54xx nie war-
to się zajmować, choćby ze względu na prze-
starzałą konstrukcję i duży pobór prądu –
praktyka pokazuje, że najzwyczajniejsze
CMOS-y z rodziny 4000 z powodzeniem bę-
dą pracować w temperaturach ujemnych.
Grzegorz Kaczmarek z Opola przeanalizo-
wał możliwość wykorzystania lamp elektro-
luminescencyjnych (EL), czyli świecących
kondensatorów (szeroki opis w EdW
11/1999 s. 43). Oto fragmenty listu: (...) nie-
stety w tym wypadku nie ma mowy o energo-
oszczędności :-( Idea nadal wydaje się słu-
szna, lecz wątpliwości budzi trwałość pro-
duktów. Ocenia się ją na kilka tysięcy godzin
świecenia. (...) folia taka jest bardzo cienka
i z powodzeniem może być naszywana na
kurtki i sprzęt. (...) dowolność kształtowania
takiego produktu też nie jest bez znaczenia.
Można tworzyć konkretne wzory i znaki. Swo-
ją drogą zastanawiam się, dlaczego nie ma je-
szcze znaków ewakuacyjnych z takich właśnie
folii. Myślę, że barierą jest cena elementów.
(...) za rozwiązaniem przemawia natomiast to,
iż z daleka święcąca powierzchnia lepiej da
się zauważyć niż punkcik świetlny. (...)
Zarówno lampy, jak i sterowniki prze-
twornic udostępnialiśmy swego czasu Czy-
telnikom EdW w ramach Klubu Konstrukto-
rów. Paweł Lasko z Nowego Sącza w jed-
nym e-mailu przysłał prosty schemat (La-
sko.gif), w drugim podzielił się interesującą
propozycją wykorzystania lampy błyskowej
z aparatu fotograficznego. Rzeczywiście
lampa wymontowana z uszkodzonego lub
nawet nowego taniutkiego aparatu, potocznie
nazywanego „idiotenkamera”, to pomysł
godny rozważenia nie tylko w kontekście
bieżącego zadania. Lampa ma niewielkie
wymiary, szybko się ładuje i na pewno bę-
dzie widoczna z bardzo daleka. Wadą jest
znaczny pobór prądu – częstotliwość bły-
sków powinna być możliwie mała – jeden
błysk na kilka sekund. Być może warto było-
by zmniejszyć pojemność głównego konden-
satora – jasność i tak będzie duża, a pozwoli
to zmniejszyć zużycie energii. W praktyce
należałoby jeszcze wziąć pod uwagę trwa-
łość palnika (brak danych) oraz sprawdzić,
czy podczas pracy elementy przetwornicy za-
nadto się nie grzeją. Piotr Bechcicki z So-
chaczewa zdecydowanie chce wykorzystać
wysokosprawne niebieskie diody LED, ste-
rowane przez kostkę NE556. Wykorzystanie
nowoczesnych diod niebieskich zapropono-
wała znaczna grupa uczestników, a dwie oso-
by – białych diod LED. Tu trzeba wyraźnie
zaznaczyć, że przez lata niebie-
skie diody LED miały fatalne
parametry. Dopiero ostatnio po-
jawiły się typy naprawdę wy-
dajne i tylko takie należałoby
stosować. Wykorzystanie kiep-
skich diod niebieskich starej
konstrukcji byłoby poważnym
błędem, bo efekt będzie nie-
współmierny do poboru prądu.
13-letni Marcin Pazdro
z Borowej chciałby wykorzy-
stać linijkę 10 diod LED stero-
waną przez kostkę LM3914
i generator przebiegu sinusoi-
dalnego lub trójkątnego. Pa-
weł Szwed z Grodźca Śl. przysłał schemat
układu z czterema tranzystorami: dwa tworzą
typowy multiwibrator, dwa pozostałe – czuj-
nik światła z fotorezystorem i obwodem za-
pewniającym histerezę (Szwed.gif). Adrian
Helwig z Bogatyni przysłał dwa proste sche-
maty (Helwig.gif) i pomysł, by wykonać
„czapkę-widkę” z migającymi LED-ami.
W liście napisał m.in.: (...) Trudno przekonać
się będzie do noszenia takiej czapki. Mój brat
powiedził, że to „wiocha” i on takiego cze-
goś by nigdy nie włożył. Ale gdyby to samo
sprytnie umiejscowić w plecaku szkolnym, to
już będzie estetyczniej i problem miejsca roz-
wiązany. (...). Adrian wspomniał też o możli-
wości wykorzystania nowoczesnego materia-
łu nazwanego luminex. Jest to rodzaj świecą-
cej tkaniny z włóknami podobnymi do świa-
tłowodowych (www.luminex.it). Tomasz
Knefel ze Skorocic przysłał dwa schematy:
jeden zawiera generator dwubramkowy, ko-
stkę 4017 i dziesięć diod LED, drugi to sche-
mat prostej przetwornicy do... miniaturowej
świetlówki. Pomysł użycia świetlówki jest
interesujący, niemniej poważną wadą,
oprócz znacznego poboru prądu, jest kru-
chość szkła świetlówki. Szymon Janek
z Lublina przysłał schemat wielofunkcyjne-
go układu migacza (Janek.gif), gdzie pełnio-
ną funkcję wybiera się za pomocą jednego
przycisku współpracującego z układem
4017. Mariusz Chilmon z Augustowa przy-
słał schemat generatora i przerzutnika RS
z dwoma przyciskami na układzie 4093
(Chilmon.gif). Mariusz podkreślił koniecz-
ność zapewnienia szczelności obudowy
i oprócz rozwiązania z przyciskami zapropo-
nował ciekawsze rozwiązanie: w plecaku
byłby wszyty magnes, a w urządzeniu miga-
jącym zamontowany kontaktron. Przy odro-
binie pomysłowości być może udałoby się
tak skonstruować całość, żeby magnes nie
tylko automatycznie włączał, ale i utrzymy-
wał migacz na plecaku. Piotr Podczarski
z Redecza Wlk. zaproponował prosty układ
z jedną kostką 4011. Dwie bramki tworzą
generator, dwie pozostałe – przerzutnik
T sterowany jednym przyciskiem – schemat
pokazany jest na rysunku 1.
Rozwiązania praktyczne
Na fotografii 1 pokazany jest model Micha-
ła Koziaka z Sosnowca. Michał wykorzystał
specjalizowaną kostkę LM3909, przeznaczo-
ną właśnie do takiego celu – patrz rysunek 2.
Zawiera ona prostą pojemnościową prze-
twornicę, przez co do zasilania diody (diod)
LED wystarczy ogniwo 1,5-woltowe. Po-
mysł jest jak najbardziej godny polecenia,
a jeden dobry paluszek wystarczy na kilka
miesięcy ciągłej pracy. Jedyną wadą mogą
być trudności z zakupem układu LM3909,
a u niektórych dystrybutorów zdecydowanie
zbyt wysoka cena.
Fotografia 2 pokazuje model Roberta
Jaworowskiego z Augustowa. Robert zasto-
sował dwie pary diod: diody zielone mają
płynnie zaświecać się i gasnąć, a czerwone
krótko błyskać. Diody zielone umieszczone
są dokładnie pod czerwonymi i „podświetlają
31
Szkoła Konstruktorów
Elektronika dla Wszystkich
Rys. 1
Fot. 1 Model Michała Koziaka
Rys. 2
je”, a więc czerwone błyski występują na tle
zielonej poświaty. Schemat układu pokazany
jest na rysunku 3. Na uwagę zasługuje tu nie-
typowy sposób sterowania diod czerwonych,
które błyskają podczas rozładowania kon-
densatora – pomysł godny odnotowania,
choć niepozbawiony wad. Dla zwiększenia
siły błysków należałoby znacznie zwiększyć
pojemność kondensatorów C1, C2. W każ-
dym razie za oryginalny pomysł Robert
otrzymuje cztery punkty i upominek.
Podobnie 4 punkty i upominek otrzymuje
Dawid Kozioł z Elbląga. Jego model poka-
zany jest na fotografii 3, a schemat na ry-
sunku 4. Dawid uznał, że płynne zaświeca-
nie i gaśniecie LED-ów jest bardziej atrak-
cyjne. Aby jednocześnie oszczędzać prąd,
wykorzystał impulsowe sterowanie diod
i dodał obwód automatycz-
nego wyłączania po kilku-
dziesięciu minutach pracy.
Efekt jest rzeczywiście in-
teresujący i godny uwagi.
Ja osobiście zwiększyłbym
tylko czas cyklu przez
zwiększenie kondensatora
C1 do 3...5µF.
Podobnie wysoko oceni-
łem rozważania i przemy-
ślany starannie wykonany,
pokazany na fotografii 4, model Piotra
Wójtowicza z Wólki Bodzechowskiej. Sche-
mat układu pokazany jest na rysunku 5. Dio-
dy są włączane co sekundę na pół sekundy
i wtedy dodatkowo migają z częstotliwością
10Hz. Na uwagę zasługuje też niecodzienny
sposób sterowania załącz/wyłącz. Niestety,
z uwagi na ewidentny błąd – rozładowanie
baterii podczas naciśnięcia obu przycisków,
nie mogę skierować projektu do publikacji
(należy dodać choćby dwa niewielkie rezy-
story w szereg z S1, S2). Oryginalny opis
i płytkę można znaleźć na naszej stronie in-
ternetowej (Wojtowicz.zip), a Autor otrzymu-
je tylko cztery punkty i upominek.
Liczna grupa uczestników do uzyskania
atrakcyjniejszego efektu świetlnego wyko-
rzystuje nie tylko pojedynczy generator, ale
też nieśmiertelną kostkę 4017, pozwalającą
w prosty sposób wysterować wiele diod
LED. Większość propozycji teoretycznych
i praktycznych to wykorzystanie sposobu
według rysunku 6 z rozmaitymi generatora-
mi. Takie rozwiązania pokazane są na kolej-
nych trzech fotografiach. Jakub Świegot ze
Środy Wlkp. w modelu z fotografii 5 wyko-
rzystał generator z inwerterem 40106. Mi-
chał Gołębiewski z Bydgoszczy w ładnym
modelu, pokazanym na fotografii 6, wyko-
rzystał generator 4047. Piotr Romysz z Ko-
szalina w „wirującej” latarce, pokazanej na
fotografii 7, wykorzystał generator z bramką
4093 i zastosował dwie kostki 4017. Odpo-
wiednio umieszczając diody, uzyskał „ruch”
dwóch zestawów diod „w przeciwnych kie-
runkach”. Schemat modelu pokazany jest na
rysunku 7, a na stronie internetowej można
znaleźć schemat wersji bardziej rozbudowa-
nej (Romysz.gif). Piotr otrzymuje upominek
i cztery punkty.
Fotografia 8 pokazuje „wirujące kółko”
Krzysztofa Kraski z Przemyśla. Układ zasi-
lany dwoma bateriami litowymi ma być
umieszczony w okrągłym pudełku po kremie,
co pozwoli uzyskać niezbędną szczelność.
Schemat układu pokazany jest na rysunku 8;
przycisk pozwala włączyć układ na określony
czas. Dawid Lichosyt z Gorenic przysłał mo-
del pokazany na fotografii 9. Warto zwrócić
uwagę, że Dawid zmienia częstotliwość pracy
generatora – schemat ideowy pokazany jest
na rysunku 9. Fotografia 10 pokazuje model
„Biegnącego punktu” Marcina Wiązani
z Buska Zdroju. Na schemacie, przedstawio-
nym na rysunku 10, warto zwrócić uwagę,
że tranzystor T1 jest włączany tylko na część
okresu generatora, co zmniejsza średni pobór
prądu i daje wrażenie „wybuchowego” bły-
skania kolejnych diod. Marcin przysłał też
drugi, prostszy model, pokazany na fotogra-
fii 11, gdzie połączone równolegle dwukolo-
rowe diody LED błyskają na przemian na
czerwono i zielono. Schemat układu i dwa
dalsze można znaleźć na naszej stronie inter-
netowej (Wiazania.gif).
32
Szkoła Konstruktorów
Elektronika dla Wszystkich
Rys. 3
Fot. 3 Model Dawida Kozioła
Fot. 5 Sygnalizator
Jakuba Świegota
Fot. 6 Układ Michała Gołębiewskiego
Fot. 2 Układ Roberta Jaworowskiego
Rys. 4
Fot. 4 Model Piotra Wójtowicza
33
Szkoła Konstruktorów
Elektronika dla Wszystkich
Fotografia 12 pokazuje
model Andrzeja Szuldy
z Olsztyna. Układ jest wyjąt-
kowo prosty, a przy tym funk-
cjonalny. Na fotografii 13
można zobaczyć mrugającego,
dwukolorowego ludzika Mi-
chała Stacha z Kamionki Ma-
łej. Na koniec zostawiłem pro-
pozycję 18-letniego Grzego-
rza Wicińskiego z Sosnowca.
Model pokazany jest na foto-
grafii 14. Układ jest bardzo
prosty, a efekt uzyskany za po-
mocą czterech dwukolorowych diod – bardzo
ciekawy. Pomysłodawców ostatnio wymie-
nionych projektów chciałbym wyróżnić:
pierwszego za prostotę i praktyczną przydat-
ność, a dwóch pozostałych za interesujące
pomysły. Wszystkie trzy kieruję do Pracowni
AVT, by po sprawdzeniu zaprezentować je
w dziale E-2000 i Forum Czytelników. Auto-
rzy na razie otrzymają książki, a po publika-
cji – honoraria. Osoby zainteresowane szcze-
gółami innych, wcześniej przedstawionych
rozwiązań, mogą zwrócić się bezpośrednio
do Autorów poszczególnych projektów.
Możliwości kontaktu były przedstawione
w Galerii Szkoły Konstruktorów właśnie
w EdW 1/2003.
Podsumowanie
Podziwiam pomysłowość uczestników, jaka
przejawiła się w zaproponowanych rozwią-
zaniach. Niezmiernie cieszę się, że znaczna
liczba uczestników przeprowadziła praktycz-
ne próby, co zaowocowało powstaniem jak
najbardziej użytecznych modeli. Jestem
przekonany, że jak zawsze po rozwiązaniu
zadania Szkoły, znaczna liczba Czytelników
zechce skorzystać z zaprezentowanych po-
mysłów. Tu szczególnie chciałem zwrócić
uwagę na kwestię zasilania. Nieliczni uczest-
nicy zaproponowali użycie maleńkich bate-
ryjek 12V od pilotów, inni jednej lub dwóch
baterii litowych. Wielu uczestników chce
wykorzystać bloczek 9V, wreszcie niezbyt
duża grupa chce zastosować dwa paluszki
Fot. 8 Kółko Krzysztofa Kraski
Rys. 9
Fot. 9 Model Dawida Lichosyta
Fot. 10 Układ 1 Marcina Wiązani
Fot. 11 Układ 2 Marcina Wiązani
Rys. 5
Rys. 6
Rys. 8
Rys. 7
Fot. 7 Latarka Piotra Romysza
34
Szkoła Konstruktorów
Elektronika dla Wszystkich
o wielkości R6 (AA) lub mniejsze R03
(AAA). Podejmując decyzję o typie baterii,
koniecznie trzeba rozważyć koszt energii, a
nie pojemność w miliamperogodzinach.
Trzeba pomnożyć ładunek (pojemność w mi-
liamperogodzinach) przez napięcie. I dopiero
ten wynik odnieść do ceny baterii. Nie ulega
kwestii, że wspomniane maleńkie 12-wolto-
we baterie do pilotów okażą się koszmarnie
drogie, a dodatkową wadą jest ich mała wy-
dajność prądowa. Niewątpliwie najtańsze
okaże się wykorzystanie popularnych alka-
licznych „paluszków” LR6. Dwa lub trzy pa-
luszki, czyli napięcie 3...4,5V, pozwolą z po-
wodzeniem zaświecić także diody niebieskie
i białe, pracujące przy napięciu około 3V.
Kolejna sprawa to wykorzystane układy
scalone. Duży plus mogą sobie
postawić ci wszyscy Koledzy,
którzy pomyśleli o wykorzystaniu
kostek z rodziny 74HC. Mają one
dużą wydajność prądową wyjść
i przy przemyślanym układzie nie
będą wymagać dodatkowych
tranzystorów sterujących diody
LED.
Jeśli chodzi o tryb pracy diod
LED, to niewątpliwie powinny
one migać, a nie świecić ciągle.
Jeśli zastosowano więcej diod,
powinny być okresowo wygasza-
ne, żeby uzyskać efekt migania.
Radykalnie poprawi to skutecz-
ność, bo miganie znacznie lepiej
przyciąga uwagę niż świecenie
ciągłe. Co bardzo ważne, jedno-
cześnie pozwala znacznie obni-
żyć pobór prądu.
Miganie wcale nie oznacza, że dioda czy
diody przez połowę czasu mają świecić,
i przez połowę być wygaszone. To pozwoli-
łoby zmniejszyć prąd tylko o połowę. Przy
okazji stwierdzam, że niektórzy Koledzy ma-
ją irracjonalne przekonanie, że każdy rodzaj
sterowania impulsowego sam w sobie polep-
sza jasność świecenia LED-ów (i wskaźni-
ków 7-segmentowych). Tymczasem sterowa-
nie impulsowe z częstotliwościami ponad
25Hz prawie nie zmieni jasności świecenia
diod w porównaniu ze sterowaniem prądem
stałym o tej samej wartości średniej. Nato-
miast sterowanie impulsowe ma sens, jeśli
diody będą świecić np. tylko przez 5...20%
czasu cyklu z dodatkowo zwiększoną jasno-
ścią, np. z prądem stałym 20...30mA, a przez
95...80% czasu będą wygaszone, przy czym
czas cyklu będzie wynosić od jednej do kilku
sekund. Tu chciałbym szczerze pogratulować
wszystkim, którzy zaproponowali takie wła-
śnie oszczędne rozwiązania.
Pojawiły się rozbieżne opinie, jakie diody
LED zastosować. Kilku Kolegów stwierdziło,
że diody ultra- i superjasne nie nadają się do
takiego zastosowania. Nie było zgodności
zwłaszcza co do diod ultrajasnych, które z re-
guły mają bardzo mały kąt świecenia, do 10
stopni, więc przy niewłaściwym kierunku
świecenia, o co łatwo, ich siła światła będzie
całkowicie bezużyteczna. Teoretycznie moż-
na to obejść, stosując kilka diod i formując
wiązkę światła według potrzeb. W każdym
razie podważaliście sens stosowania LED-ów
o wąskim kącie świecenia. Niektórzy stwier-
dzili, że wystarczą „zwykłe” diody o podwyż-
szonej jasności, najlepiej z matową soczew-
ką. Mają one duży kąt świecenia, a wydajność
świetlna w ciemnym otoczeniu jest wystar-
czająca. Dwóch uczestników twierdzi, że
warto zastosować diody o większej średnicy 8
lub 10mm, najlepiej z białą, matową soczew-
ką, bo będą zdecydowanie lepiej widoczne,
niż małe o średnicy 3 czy 5mm. Czytając po-
szczególne opinie, odniosłem wrażenie, że
nie wszyscy uczestnicy sprawdzili widzial-
ność proponowanych diod w warunkach na-
turalnych, gdy idący lub biegnący pieszy wy-
konuje znaczne ruchy. Proponuję praktyczne
wypróbowanie różnych wersji.
Jeśli chodzi o obwody sterujące, to sporo
było układów zbyt rozbudowanych. W tym
zastosowaniu lepsze będą układy w miarę
proste i tanie, chyba że pozwolą uzyskać
Marcin W
Wiązania Busko Zdrój . . . . . . . .140
Dariusz DDrelicharz Przemyśl . . . . . . . . . .88
Mariusz CChilmon Augustów . . . . . . . . . .85
Michał SStach Kamionka Mała . . . . . . . .78
Jarosław CChudoba Gorzów Wlkp. . . . . . .49
Roman BBiadalski Zielona Góra . . . . . . .46
Marcin M
Malich Wodzisław Śl. . . . . . . . .44
Krzysztof KKraska Przemyśl . . . . . . . . . . .41
Jarosław TTarnawa Godziszka . . . . . . . . .41
Piotr RRomysz Koszalin . . . . . . . . . . . . .39
Bartłomiej RRadzik Ostrowiec Św. . . . . . .37
Piotr W
Wójtowicz Wólka Bodzechowska .37
Michał KKoziak Sosnowiec . . . . . . . . . . .36
Dariusz KKnull Zabrze . . . . . . . . . . . . . .29
Szymon JJanek Lublin . . . . . . . . . . . . . .28
Filip RRus Zawiercie . . . . . . . . . . . . . . . .28
Dawid LLichosyt Gorenice . . . . . . . . . . .27
Rafał SStępień Rudy . . . . . . . . . . . . . . . .26
Piotr DDereszowski Chrzanów . . . . . . . . .24
Radosław CCiosk Trzebnica . . . . . . . . . . .22
Mariusz CCiołek Kownaciska . . . . . . . . . .20
Robert JJaworowski Augustów . . . . . . . .20
Jakub KKallas Gdynia . . . . . . . . . . . . . . .20
Jacek KKonieczny Poznań . . . . . . . . . . . .20
Piotr BBechcicki Sochaczew . . . . . . . . . .18
Michał PPasiecznik Zawiszów . . . . . . . . .18
Bartek CCzerwiec Mogilno . . . . . . . . . . .17
Radosław KKoppel Gliwice . . . . . . . . . . .17
Łukasz CCyga Chełmek . . . . . . . . . . . . .16
Jakub JJagiełło Gorzów Wlkp. . . . . . . . .16
Andrzej SSadowski Skarżysko-Kam. . . . .16
Jakub Świegot Środa Wlkp. . . . . . . . . .16
Arkadiusz ZZieliński Częstochowa . . . . . .16
Maciej JJurzak Rabka . . . . . . . . . . . . . .15
Ryszard M
Milewicz Wrocław . . . . . . . . . .15
Emil UUlanowski Skierniewice . . . . . . . .15
Artur FFilip Legionowo . . . . . . . . . . . . . .14
Dawid KKozioł Elbląg . . . . . . . . . . . . . . .14
Piotr PPodczarski Redecz . . . . . . . . . . . .14
Paweł SSzwed Grodziec Śl. . . . . . . . . . .14
Aleksander DDrab Zdziechowice . . . . . . .13
Wojciech M
Macek Nowy Sącz . . . . . . . . .13
Zbigniew M
Meus Dąbrowa Szlach. . . . . .12
Krzysztof Żmuda Chrzanów . . . . . . . . . .12
Sebastian M
Mankiewicz Poznań . . . . . . . .11
Andrzej SSzymczak Środa Wlkp. . . . . . . .11
Marcin DDyoniziak Brwinów . . . . . . . . . .10
Tomasz GGajda Wrząsawa . . . . . . . . . . .10
Bartek SStróżyński Kęty . . . . . . . . . . . . .10
Punktacja Szkoły Konstruktorów
Fot. 12 Układ Andrzeja Szuldy
Fot. 13 Model Michała Stacha
Rys. 10
Fot. 14 Układ Grzegorza Wicińskiego
Fot. 15 Model Jarosława Chudoby
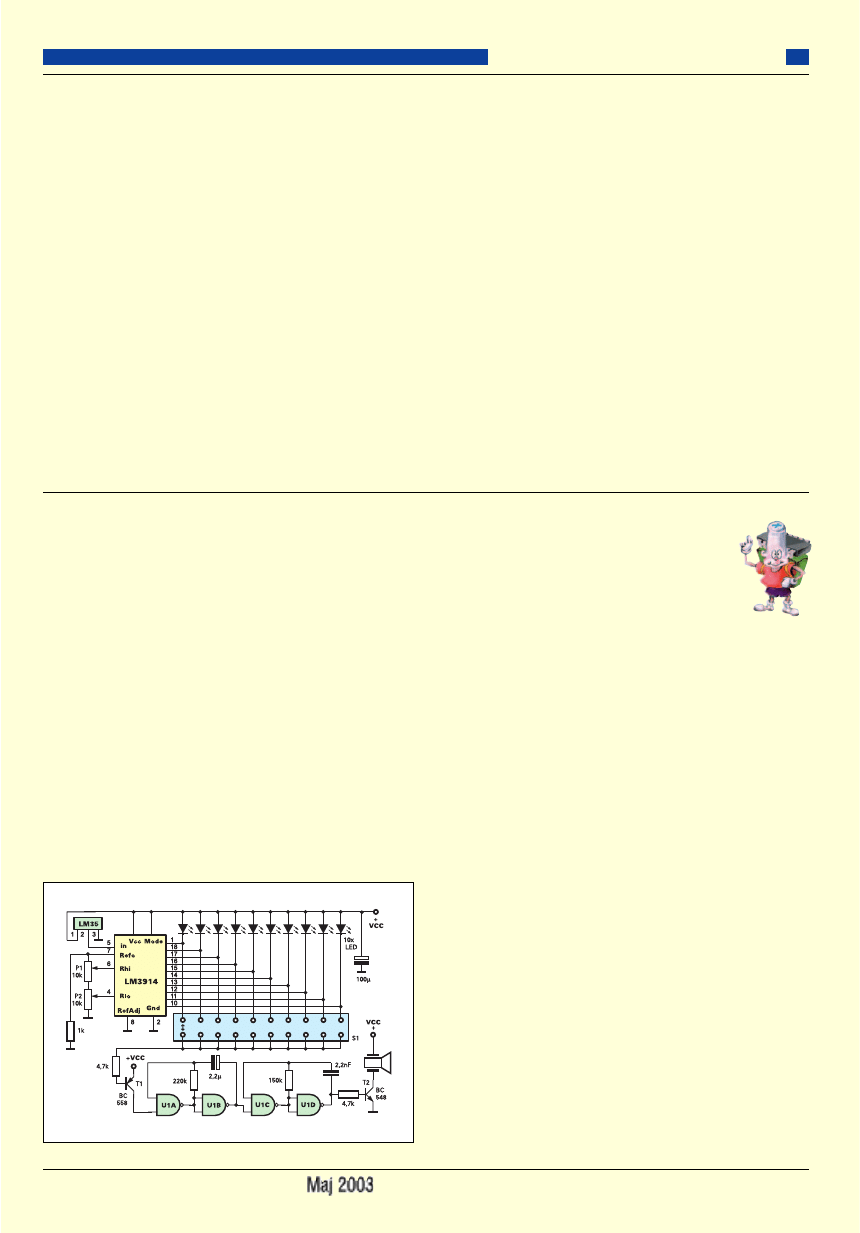
35
Szkoła Konstruktorów
Elektronika dla Wszystkich
jakiś ekstra efekt. Sami zdecydujcie, czy bar-
dziej pasuje Wam prosty i tani migacz, np.
z dobrą niebieską diodą, czy też bardziej roz-
budowany, niepowtarzalny, wielokolorowy
efekt świetlny.
W kwestii obudowy i umieszczenia lam-
pek nie było zgodności. Niektórzy twierdzili,
że nie będzie problemem noszenie jakiegoś
gadżetu, dającego interesujący efekt świetlny.
Mógłby on mieć postać opaski na ramię, moż-
na go wmontować w czapkę, pasek czy ple-
cak. Inni widzą poważną barierę psycholo-
giczną, żeby człowiek nie wyglądał jak choin-
ka i właśnie stąd niektórzy wzięli pomysł
czujnika światła, by migacz włączał się dopie-
ro po oświetleniu światłami samochodu. Idea
na pozór jest słuszna, ale występuje tu poważ-
ny problem. Kto nie jest kierowcą, prawdopo-
dobnie go nie czuje. Tymczasem często re-
flektory samochodu są brudne, światła mija-
nia, żeby nie oślepiać jadących z przeciwka,
świecą w dół, czasem zdecydowanie za bar-
dzo w dół. W efekcie ilość światła docierają-
cego do pieszego jest znikoma. Dotyczy to
zwłaszcza małych samochodów – nie można
liczyć na sensowne oświetlenie ich światłami
mijania. A jeśli układ miałby reagować także
na słabe światło – będzie reagował też na inne
źródła i nie będzie działał według oczekiwań,
chyba żeby element światłoczuły umieszczo-
ny był w rurce, by kierunkowo „łapał” światło
reflektorów. W każdym razie idea jest dysku-
syjna, a niektórzy proponują działanie zupeł-
nie odwrotne: czujnik światła, który będzie
włączał migacz po zapadnięciu zmroku.
W tym przypadku trzeba dodać obwody, by
reagował na średnie oświetlenie i by reflekto-
ry samochodów nie wyłączyły światełka
ostrzegawczego. A może optymalnym roz-
wiązaniem jest brak czujnika światła, a za to
obecność prostego wyłącznika czasowego?
Na koniec chciałbym gorąco zachęcić do
używania i wyposażenia swoich bliskich
w takie gadżety, niewątpliwie zwiększające
bezpieczeństwo na drodze. I naprawdę nigdy
nie wiadomo, czy interesujący układ z nie-
bieskimi diodami LED niespodziewanie nie
zdobędzie popularności i nie rozpowszechni
się na szerszą skalę.
Jestem bardzo zadowolony z nadesłanych
prac i naprawdę przykro mi, że ze względu
na szczupłość funduszu Szkoły nie mogę na-
grodzić Autorów wszystkich interesujących
pomysłów i ładnych modeli. Nagrody książ-
kowe, a po publikacji honoraria otrzymają:
Andrzej Szulda, Michał Stach i Grzegorz
Wiciński. Upominki otrzymują: Robert Ja-
worowski, Dawid Kozioł, Piotr Wójtowicz,
Piotr Romysz, Krzysztof Kraska, Dawid
Lichosyt, Marcin Wiązania i Michał Gołę-
biewski. Aktualna punktacja zawarta jest
w tabeli. Dodatkowo 3 punkty dopisuję Ja-
rosławowi Chudobie z Gorzowa Wlkp.,
który rozwiązanie zadania 82 umieścił
w paczce dwukrotnie oznaczonej numerem
83 – model pokazany jest na fotografii 15.
Serdecznie zapraszam do udziału w rozwią-
zywaniu kolejnych zadań i do nadsyłania prac
w terminie.
Wasz Instruktor
Piotr Górecki
C
C
o
o
t
t
u
u
n
n
i
i
e
e
g
g
r
r
a
a
?
?
- Szkoła KKonstruktorów klasa III
Rozwiązanie zadania 83
W EdW 1/2003 na stronie 36 zamieszczony
był schemat niecodziennego regulatora tem-
peratury, a właściwie termometru do akwa-
rium, nadesłany jako rozwiązanie jednego
z poprzednich zadań Szkoły. Schemat poka-
zany jest na rysunku A. Autor pisze, że za-
kres temperatury powinien wynosić
+18...+28
o
C. Aby ustawić taki zakres, należy
na nóżce 4 ustawić 180mV, a na nóżce
6 – 280mV. (...) Bramki U1C i U1D tworzą
generator akustyczny, który jest przerywany
przez generator na U1A i U1B. Zadaniem te-
go generatora jest sygnalizowanie przekro-
czenia określonej temperatury.
Układ jest interesujący, a Autorowi bez
wątpienia należy się pochwała za oryginalny
pomysł. Idea jest słuszna i może być prak-
tycznie wykorzystana, jednak należy wziąć
pod uwagę pewne dodatkowe czynniki
i zmodyfikować układ.
Zanim do tego przejdę, zacytuję fragment
jednego z listów, który również i mnie dał spo-
ro satysfakcji: (...) mam 20 lat. Od paździer-
nika 1998 roku jestem Waszym stałym czytel-
nikiem, lecz w konkursie „Co tu nie gra?”
biorę udział po raz pierwszy. Wcześniej nie
przywiązywałem uwagi do tej części Waszego
pisma, lecz teraz postanowiłem zatrzymać się
na tej rubryce dłużej i co... niesamowite, ale
tak mnie to wciągnęło,
że będę tu zaglądał
z zainteresowaniem co
miesiąc, gdyż można
z tego działu wiele się
nauczyć, a najlepsza
nauka to przecież na-
uka na własnych błę-
dach. (...)
A teraz przecho-
dzimy do schematu:
jedna usterka jest
oczywista – brak re-
zystora z kolektora T1
do masy – nazwijmy
go rezystorem Rx. Re-
zystor taki musi być
w układzie, by ściągnąć (a nie podciągnąć,
jak pisali niektórzy) wejście bramki do masy,
gdy T1 nie przewodzi. Jest to ewidentny
błąd, jednak uważam, że może on być efek-
tem zwykłego przeoczenia – na oryginalnym
odręcznym schemacie tranzystor T1 naryso-
wany jest tuż przy dolnej krawędzi kartki
i być może to było przyczyną tego braku.
Wątpliwości budzi też sposób sterowania
tranzystora T1. Teoretycznie gdy diody LED
nie świecą, nie płyną przez nie prądy. W rze-
czywistości trzeba liczyć się z prądem upły-
wu wyjść, który wprawdzie typowo powi-
nien wynosić tylko 0,1µA, ale maksymalnie
może wynosić 10µA. W zaproponowanym
układzie przy wzmocnieniu prądowym tran-
zystora równym 100x, przy prądzie bazy
0,1µA prąd kolektora wyniesie 10µA – ozna-
cza to, że dodany rezystor Rx nie powinien
mieć dużej wartości. Rozpatrując najgorszy
przypadek, przy prądzie bazy (upływu) rów-
nym 10µA, prąd kolektora T1 wyniósłby aż
1mA! Aby definitywnie wykluczyć możli-
wość błędnego działania, należy dodać rezy-
stor Ry o wartości poniżej 47k
Ω między do-
datnią szynę zasilania a bazę T1 w jeden ze
sposobów pokazanych na rysunku B. Za
pracą kostki LM3914 w trybie linijki powin-
no to zagwarantować prawidłową pracę.
W trybie punktowym nóżka 1 ma dodatkowy
obwód i trzeba byłoby się wtedy liczyć z prą-
dem „upływu” nawet rzędu 450µA (typowo
A
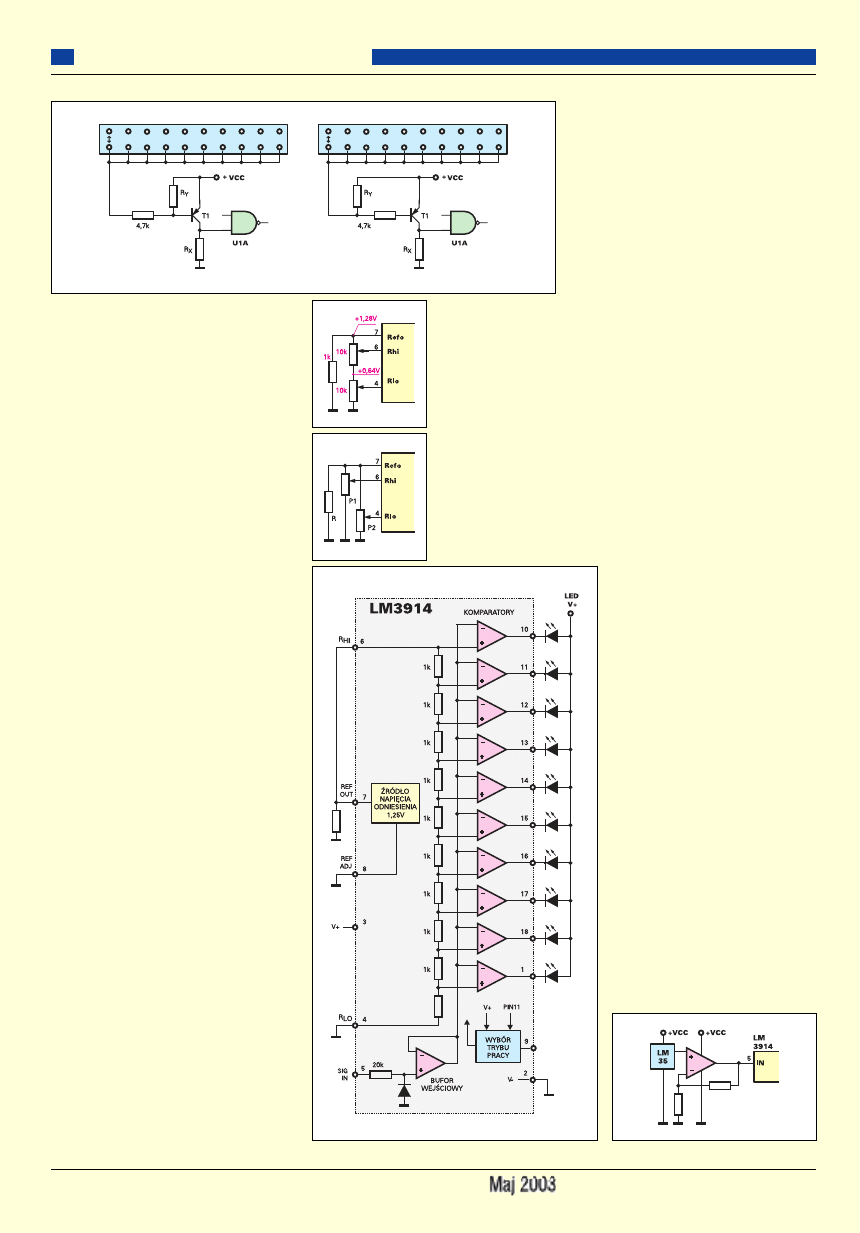
150µA), co wymagałoby zmniejszenia Ry
nawet do wartości 1k
Ω.
Do obu generatorów też mieliście zastrze-
żenia. W układzie klasycznego generatora
dwubramkowego nie powinno się stosować
kondensatorów elektrolitycznych z uwagi, że
pojawia się tam napięcie zmienne. Konden-
sator elektrolityczny 2,2µF należy zmienić
na stały 470nF...1µF i stosownie zwiększyć
wartość rezystora z 220k
Ω na 470kΩ...1MΩ.
Na schemacie nie podano, jaką wartość ma
napięcie zasilające. Przy napięciach powyżej
5V zalecane jest dodanie rezystorów ograni-
czających w obu generatorach – ich brak nie
jest istotną usterką, bo praktyka pokazuje, że
takie rezystory rzadko są niezbędne.
Liczna grupa osób rozważyła obwód ste-
rowania brzęczyka. Wszystko wskazuje, że
w układzie ma pracować zwykła membrana
piezo, a nie brzęczyk z generatorem. Jeśli
tak, zaproponowany obwód z tranzystorem
T2 jest błędny. Membrana piezo zachowuje
się jak kiepskiej jakości kondensator, więc
włączenie jej wprost między kolektor a plus
zasilania jest błędem. Można równolegle do
membrany dołączyć rezystor (np. 1k
Ω) lub
lepiej cewkę o takiej indukcyjności, by z po-
jemnością membrany tworzyła obwód rezo-
nansowy o częstotliwości równej mechanicz-
nej częstotliwości rezonansowej membrany.
W najprostszym przypadku należy usunąć
tranzystor T2 i dołączyć membranę wprost
do wyjścia bramki U1D.
Zwróciliście też uwagę, że po przekrocze-
niu ustawionej temperatury sygnalizator bę-
dzie długo wył i nie ma możliwości jego wy-
łączenia. Rzeczywiście, nawet małe akwarium
ma bardzo dużą bezwładność cieplną. Na mar-
ginesie wspomnę, że kostka LM3914 nie ma
obwodów histerezy w obwodach sterowania
poszczególnych diod LED, ma natomiast taką
budowę, że także w trybie punktowym,
w „strefie pośredniej”, gdy gaśnie jedna dioda,
a zaświeca się kolejna, nigdy nie zostaną wy-
gaszone wszystkie diody, tylko na tym „po-
graniczu” będą świecić obie. Zapobiega to
błędnym wskazaniom w trybie punktowym.
W każdym razie należy albo dodać obwód
wyłączania brzęczyka, albo zmodyfikować
układ w inny sposób.
Kilka osób słusznie zwróciło uwagę na to,
że przy pracy w trybie linijki i przy napięciu
zasilania powyżej
10V trzeba liczyć się
ze znaczną mocą
strat. Na schemacie
nie podano wartości
napięcia zasilania,
więc nie sposób
oszacować strat. Nie-
mniej tego szczegółu
pominąć nie można.
Kolejna usterka
jest znacznie subtel-
niejsza, ale i ważniej-
sza. Przede wszystkim
Autor chce za pomocą
potencjometrów P1, P2 ustawić napięcia
180mV i 280mV. Owszem, może ustawić ta-
kie napięcie na nóżce 4 za pomocą P2, ale nie
ustawi napięcia 280mV na nóżce 6, bo napię-
cie na dolnym wyprowadzeniu P1 wynosi
około 0,64V (0,6...0,67V) – ilustruje to rysu-
nek C. Oznaczałoby to, że najniższa górna
temperatura wynosi około +64
o
C. Należałoby
zmienić układ, choćby według rysunku D.
Modyfikacja według rysunku D nie roz-
wiązuje jednak problemu do końca. Rzecz
w tym, że w proponowanym układzie różni-
ca napięć na końcówkach RHI, RLO (nóżki
6, 4) wynosi tylko 100mV. Przynajmniej teo-
retycznie wzrost napięcia o 10mV ma wy-
starczyć do zaświecenia następnej diody –
można powiedzieć, iż na jedną diodę przypa-
da 10mV – dokładnie tyle, ile wynosi przy-
rost napięcia kostki LM35 przy zmianie tem-
peratury o 1
o
C. Problem polega na tym, że
układ LM3914 zawiera dziesięć komparatorów
i drabinkę rezystorową według rysunku E.
Dokładność wykonania „liniowej” drabinki
w kostce ‘3914 jest bardzo dobra, natomiast
nie można pominąć napięcia niezrównowa-
żenia komparatorów. Według karty katalogo-
wej napięcie niezrównoważenia typowo wy-
nosi 3mV, a maksymalnie do 15mV. Maksy-
malny błąd sięgający 15mV to więcej
niż przyjęte napięcie przypadające na
jedną diodę (10mV).
Serdecznie gratuluję tym nielicz-
nym uczestnikom, którzy zwrócili
uwagę na tę istotną niedoróbkę i za-
proponowali modyfikację. Na pewno
trzeba znacznie zwiększyć różnicę na-
pięć między końcówkami 6, 4 kostki
LM3914. Automatycznie oznacza to
konieczność wzmocnienia sygnału
z czujnika temperatury. Można do te-
go wykorzystać wzmacniacz opera-
cyjny, mogący pracować przy napię-
ciach wejściowych bliskich ujemne-
mu napięciu zasilania – schemat po-
kazany jest na rysunku F. Może to
być nawet popularny LM358. W tym
wypadku napięcie niezrównoważenia
wzmacniacza operacyjnego nie gra
roli, ponieważ zostanie skompenso-
wane podczas kalibracji za pomocą
potencjometrów. Kilku Kolegów za-
proponowało inny, prostszy sposób
według rysunku G. Dodanie dwóch
rezystorów pozwala zwiększyć
współczynnik przetwarzania kostki
LM35 nawet do 100mV/K.
36
Szkoła Konstruktorów
Elektronika dla Wszystkich
D
E
B
C
F
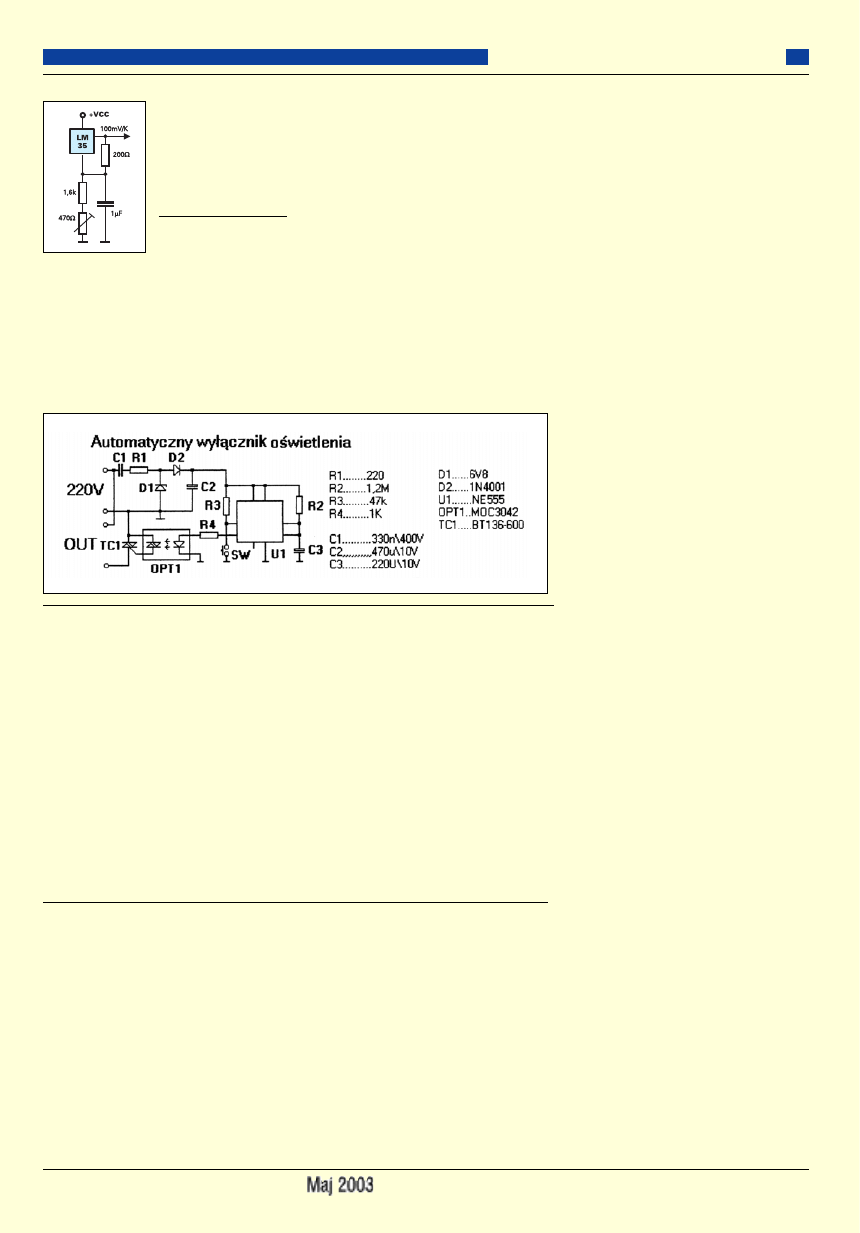
Nagrody-upominki
za najlepsze odpowiedzi
otrzymują: Wojciech
Sobczak - Wólka Łę-
czeszycka, Adam La-
skowski - Rytel, Jakub
Świegot - Środa Wlkp.
Zadanie 87
Na rysunku H pokaza-
ny jest układ nadesłany jako rozwiązanie jed-
nego z poprzednich zadań Szkoły. Ma to być
układ czasowego wyłącznika oświetlenia do
garażu z kostką 555, optotriakiem i zasila-
czem beztransformatorowym. Naciśnięcie
przycisku SW (zwykły microswitch umie-
szczony gdziekolwiek, w dogodnym, łatwo
dostępnym miejscu) rozpoczyna cykl pracy.
Autor napisał: Układ jest ustawiony tak, żeby
czas, w którym światło będzie włączane, wy-
nosił 5-6min, lecz można go zmieniać w sze-
rokich granicach za pomocą rezystora R2
i/lub kondensatora C3. W układzie zastoso-
wałem klasyczną aplikację układu NE555
oraz bardzo prosty zasilacz beztransformato-
rowy, gwarantujący niezawodność oraz niski
koszt wykonania.
Jak zwykle pytanie brzmi:
Co tu nie gra?
Proszę o możliwie krótkie odpowiedzi.
Czy idea jest błędna, czy tylko chodzi o drob-
ną usterkę? Kartki, listy i e-maile oznaczcie
dopiskiem NieGra87 i nadeślijcie w terminie
45 dni od ukazania się tego numeru EdW.
Autorzy najlepszych odpowiedzi otrzymają
upominki.
Piotr Górecki
G
H
Ciąg dalszy ze strony 29.
Ostatnio zamiast fotoploterów do naświe-
tlania klisz wykorzystuje się naświetlarki
postscriptowe, które normalnie wykorzysty-
wane są do zupełnie innych celów, choćby do
naświetlania klisz dla drukarni. Wtedy plik
roboczy do wykonania kliszy nie ma nic
wspólnego z omówionym właśnie formatem
Gerber (RS-274), tylko jest to plik w znanym
i szeroko stosowanym formacie, a właściwie
języku PostScript. Aby korzystając z Protela
wytworzyć taki plik, nie wykorzystuje się
CAM Managera. W komputerze (nie w Pro-
telu, tylko w systemie Windows) należy zain-
stalować kolejną drukarkę, którą jest albo
rzeczywiste urządzenie postscriptowe, albo
sterownik postscriptowy. Potem każdy pro-
gram Windows może wykorzystywać tę
(wirtualną) drukarkę, która wytworzy pliki
postscriptowe. Można też zainstalować
i spróbować wykorzystać inne sterowniki,
przeznaczone do tworzenia plików PDF
(PDF Writer, Acrobat Distiller).
Choć wykorzystywanie PostScriptu jest
coraz szersze, a plików Gerbera coraz mniej-
sze, nieprzypadkowo poświęciłem formatowi
RS-274 aż tyle uwagi. Przyczynę poznasz w
następnym odcinku, w kolejnym numerze
EdW.
Piotr Górecki
Szkoła Konstruktorów
37
Elektronika dla Wszystkich
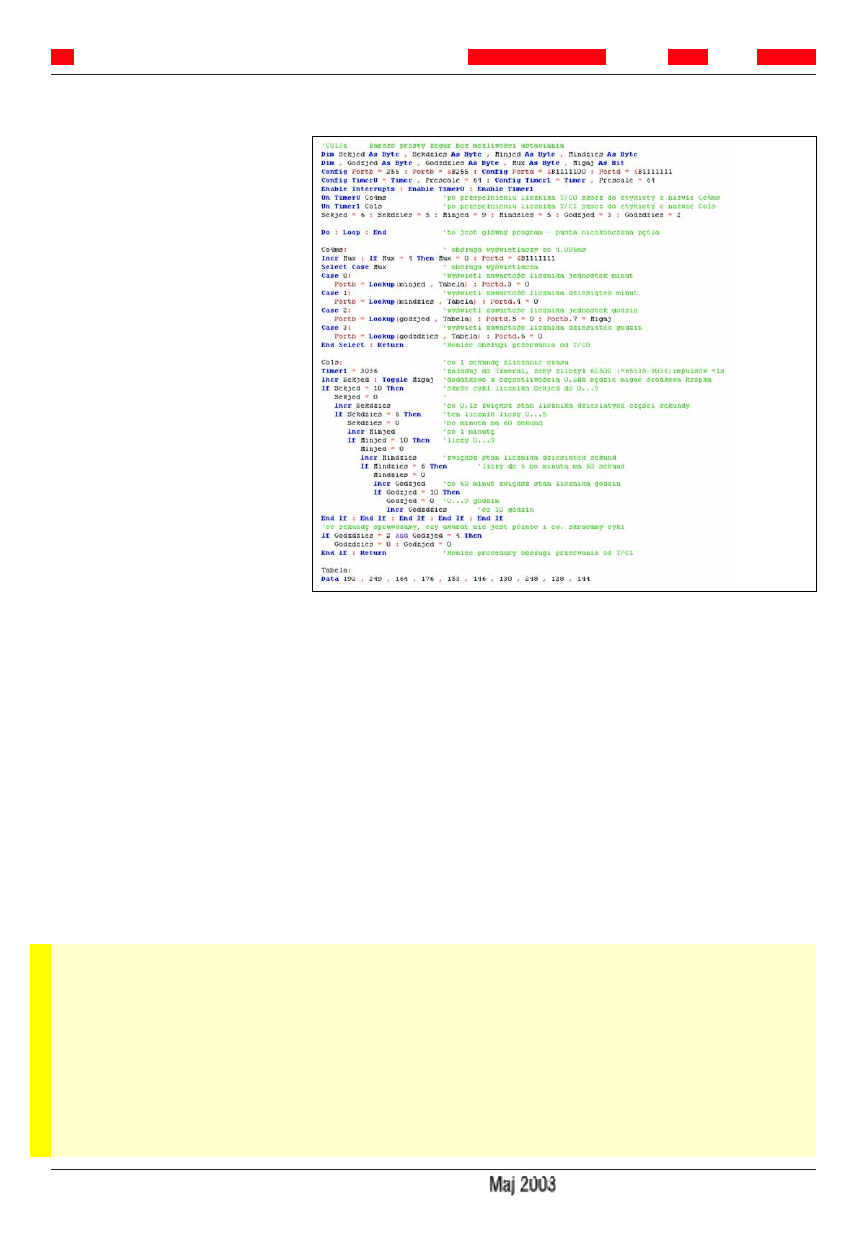
38
Elektronika dla Wszystkich
M1
54
Mikroprocesorowa Ośla łączka
„Przestarzałe” przerwania
Co bardzo ważne, odpowiednia flaga jest usta-
wiana zawsze, gdy spełniony zostanie warunek
przerwania, np. przepełnienie licznika i to nieza-
leżnie od stanu bitu indywidualnego zezwolenia.
Wskazuje na to też rysunek C (w poprzednim
numerze EdW). Flagę możemy traktować podob-
nie jak chorągiewkę sędziego bocznego na boisku
piłki nożnej. Sędzia boczny ma za zadanie zasy-
gnalizować zdarzenie – podnosi chorągiewkę (fla-
gę) i na przykład sygnalizuje faul przy linii bocz-
nej. I to jest koniec jego roli. Ostateczną decyzję
podejmuje sędzia główny i np. pokazuje delikwen-
towi żółtą kartkę lub ignoruje sygnał sędziego
bocznego, uważając, że sam lepiej widział zdarze-
nie. W procesorze jest podobnie – dane urządze-
nie, np. licznik T/C0 „podnosi chorągiewkę”, czy-
li jak mówimy – ustawia flagę TOV0. I to jest ko-
niec jego roli.
Jeśli nie są ustawione oba bity zezwalające: ze-
zwolenia globalnego I (SREG.7) i lokalnego TOIE
(TIMSK.1), procesor zignoruje ten fakt, pomimo
ustawienia flagi. Procesor raczy łaskawie zauważyć
„podniesioną chorągiewkę” tylko wtedy, gdy oba
wspomniane bity zezwalające są ustawione. Zau-
waży i przejdzie do procedury obsługi przerwania.
Działanie procesora różni się jednak w pew-
nym istotnym szczególe od reakcji sędziów na bo-
isku. Mianowicie jeśli w procesorze któryś „sędzia
boczny” podniesie chorągiewkę, trzyma ją do
skutku – aż „sędzia główny” ją zauważy. Oznacza
to, że nawet jeśli przerwania są wyłączone, czyli
nie są ustawione bity zezwalające, mimo wszystko
przy spełnieniu odpowiednich warunków zostaną
ustawione flagi przerwań (także tych wyłączo-
nych). Mało tego – flagi „wyłączonych” przerwań
pozostaną ustawione niejako na stałe, bo nie ma
mechanizmu ich samoczynnego zerowania (flaga
jest zerowana dopiero na początku obsługi „swo-
jego” przerwania). Jeśli w takiej sytuacji dane
TECHNIKALIA
Teraz możesz samodzielnie „pokombino-
wać” i bez mojej pomocy zrealizować naj-
prawdziwszy zegar cyfrowy. Zegar cyfrowy
to jedna z żelaznych pozycji repertuaru każ-
dego elektronika. A samodzielne zaprogra-
mowanie zegara to nie tylko okazja do dal-
szych ćwiczeń i możliwość wykazania się
inicjatywą. Samodzielne (albo prawie samo-
dzielne) zaprojektowanie zegara niewątpli-
wie jest też wielkim powodem do dumy jego
Twórcy, czyli Ciebie.
Dlatego serdecznie zachęcam także Cie-
bie, Czytelniku, do spróbowania swych sił
w takim zadaniu. Najpierw, nie czytając dal-
szej części opisu, spróbuj zaprojektować
zwyczajny zegar cyfrowy, pokazujący godzi-
ny i minuty. Dopiero potem zapoznaj się
z zaprezentowanymi rozwiązaniami. Na ra-
zie nie musi on mieć możliwości ustawiania
– niech tylko prawidłowo odmierza czas.
No, bierz się do roboty!
Oczywiście sposobów realizacji zegara
jest mnóstwo. Na pewno warto wykorzystać
jeden z liczników T/C0 lub T/C1, przy czym
wcale nie musi on zgłaszać przerwań co se-
kundę. Ważne jest, by wykorzystać jakiś pre-
cyzyjny sposób odmierzania czasu, a do ta-
kiej roli każdy z liczników T/C0, T/C1 nada-
je się znakomicie. Ja w pierwszym przykłado-
wym programie wykorzystałem timer T/C1
z preskalerem 64, czyli zwiększający swój
stan co 16µs. Przy długości cyklu 62500 da to
dokładnie 1 sekundę. Można też zastosować
wstępny podział przez 256 (co 64µs) i wtedy
do uzyskania przerwania co sekundę cykl
licznika trzeba skrócić do 15625 – przerwania
też będą zgłaszane dokładnie co sekundę.
Potrzebne będą również impulsy do pracy
wyświetlacza – tu możemy wykorzystać licz-
nik T/C0 dający, jak poprzednio, przerwania
co 4ms. Ponieważ będą służyć tylko do stero-
wania wyświetlacza, można nie skracać cza-
su cyklu, uzyskując przerwania co 4,096ms.
Główny program prościutkiego zegara,
bez możliwości ustawiania, mógłby wyglą-
dać jak na rysunku 62 (C013a.bas). Przea-
nalizuj program takiego zegara. Dla zmniej-
szenia długości listingu zastosowałem umie-
szczanie w jednej linii kilku poleceń oddzie-
lonych dwukropkami – nie daj się zmylić ta-
kiemu zapisowi i w razie wątpliwości porów-
naj z wcześniejszymi programami. Załaduj
program do procesora i uruchom. Zegar pra-
cuje, zaczyna swą pracę kilka sekund przed
północą, jednak istotną wadą jest brak możli-
wości ustawiania czasu.
Do ustawiania minut i godzin można wy-
korzystać program „inteligentnego przyci-
sku” zrealizowany w ćwiczeniu 10. Ale usta-
wianie warto byłoby zrealizować tak, by do-
dać możliwość zerowania licznika sekund.
Wtedy otrzymamy w pełni użyteczny zegar.
Rysunek 63 (C013b.bas) pokazuje taki
program. Porównaj z poprzednim i zwróć uwa-
gę, że teraz przerwanie przychodzące co se-
kundę tylko skraca cykl licznika i zwiększa
stan licznika sekund. Natomiast sprawdzanie
i korygowanie liczników dokonywane jest co
4,096ms. Takie rozwiązanie jest potrzebne, by
prawidłowo zmieniać stany liczników podczas
ustawiania za pomocą przycisków S1 i S2.
„Inteligentny” przycisk S2 pozwala usta-
wić minuty, a S1 dodatkowo godziny. Czer-
woną linią zaznaczyłem polecenia zapewnia-
jącą kasowanie liczników sekund podczas
naciskania S2. Oznacza to, że w praktyce
ustawianie zegara będzie wyglądać tak: naj-
pierw za pomocą S2 należy ustawić minuty,
najlepiej o jedną mniej, niż trzeba. Potem
za pomocą S1 ustawić godziny. O pełnej mi-
nucie należy wcisnąć S2, co ustawi potrzeb-
ną godzinę i minutę, a także wyzeruje licznik
sekund, zapewniając dużą dokładność.
W praktyce dokładność zegara będzie za-
leżeć od częstotliwości i stabilności rezona-
tora kwarcowego, która nominalnie wynosi
Rys. 62
Ćwiczenie 13
Prawdziwy zegar cyfrowy
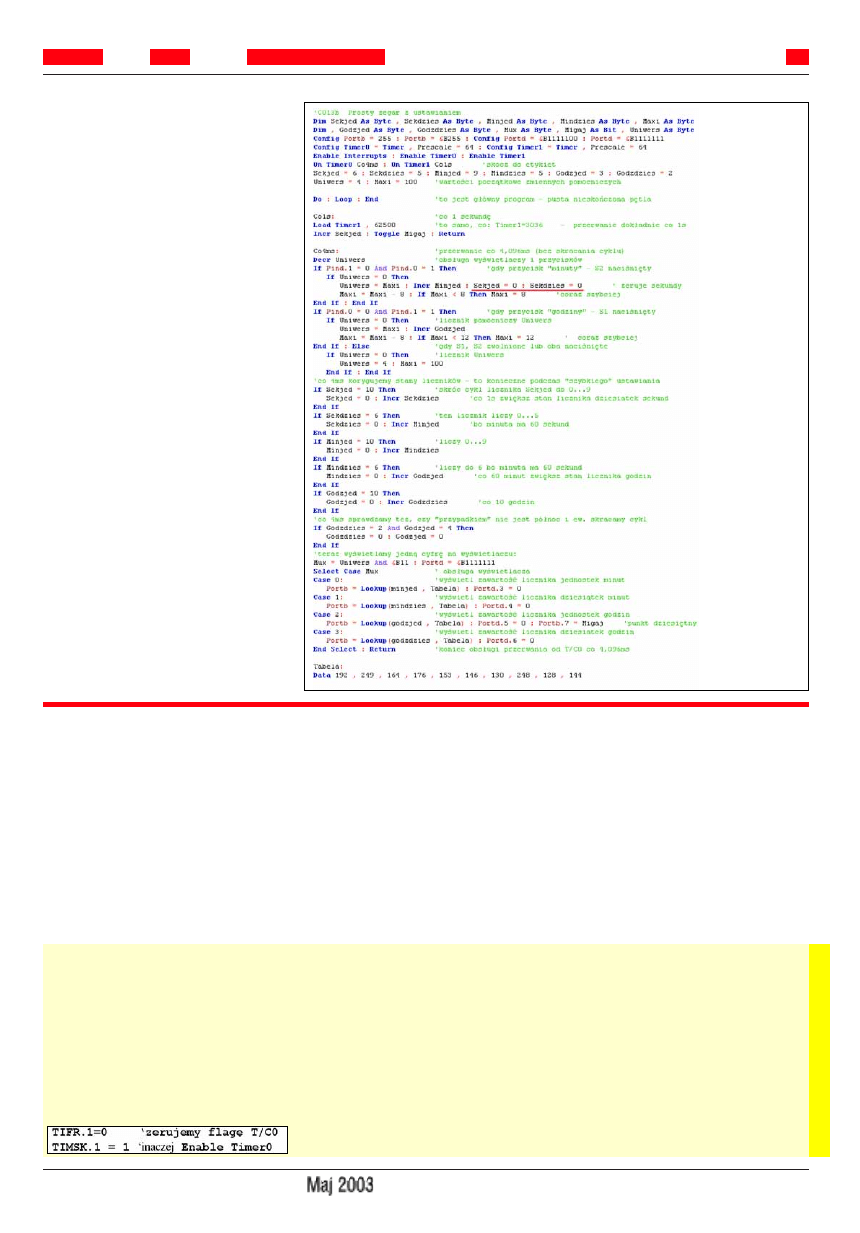
39
Elektronika dla Wszystkich
Mikroprocesorowa Ośla łączka
M1
55
przerwanie zostanie potem odblokowane (bity ze-
zwolenia ustawione), procesor dopiero wtedy „zau-
waży” tę dużo wcześniej ustawioną flagę i z dowol-
nie dużym opóźnieniem obsłuży „przestarzałe”
przerwanie. Program może być jednak tak napisany,
żeby procesor ignorował „stare”, dużo wcześniej
zgłoszone przerwania – w tym celu można progra-
mowo zerować flagi (przecież to są bity w rejestrach
I/O) i tym samym nie obsługiwać takich „przesta-
rzałych” przerwań. Trzeba wtedy najpierw wyzero-
wać bit flagi, a dopiero potem odblokować przerwa-
nie.
Przykładowo dla licznika T/C0:
TIFR.1=0 ‘zerujemy flagę T/C0
TIMSK.1 = 1 ‘inaczej Enable Timer0
Dotyczy to większości przerwań (oprócz
INT0, INT1 w niektórych konfiguracjach), ale tyl-
ko w sytuacji, gdy przerwania są odblokowywane
i blokowane podczas działania programu (Ena-
ble/Disable). Takimi szczegółami nie musisz się
jednak martwić – w większości przypadków spra-
wa jest prostsza: potrzebne przerwania są odblo-
kowane przez cały czas działania programu i każ-
de czynne zgłoszenie przerwania zostaje sprawnie
obsłużone. Nawet jeśli wszystkiego nie zrozumia-
łeś, nie przejmuj się – sygnalizuję Ci specyficzne
właściwości procesora, które mogą się okazać pu-
łapkami, ale tylko w pewnych nietypowych pro-
gramach; w prostszych nie napotkasz problemów.
ROZMIARY i rozmiary
W naszym procesorze razem mamy ponad 2300
bajtów w pamięciach FLASH (2048), EEPROM
(128) i RAM (128 + rejestry I/O, razem około 190
bajtów). Podając wielkość pamięci, często wyraża-
my ją w kilobajtach (KB). W zasadzie przedrostek
kilo oznacza tysiąc, ale w informatyce, gdzie pod-
stawą jest system dwójkowy, oznacza 1024 (bo
1024 liczba 2 do potęgi dziesiątej). Dla odróżnienia
w informatyce K piszemy jako wielką literę:
1024B = 1KB
TECHNIKALIA
4,000MHz, a w praktyce zapewne będzie
nieco inna. Jest to prawie pewne, ponieważ
popularne, tanie rezonatory kwarcowe, choć
są dość stabilne, mają znaczne rozrzuty czę-
stotliwości pracy. Nominalną częstotliwość
kwarcu można uzyskać, zmieniając pojem-
ność C3, C4 w zakresie 10pF...68pF. Prostszy
dla programisty sposób to zmiana długości
zliczania timera T/C1. Trzeba eksperymen-
talnie zmienić nieco długość cyklu z 62500
na taką, która dla danego egzemplarza kwar-
cu da czas między przerwaniami równy do-
kładnie 1 sekundzie.
Zegary można też realizować na wiele in-
nych sposobów. Stosując przerwania od time-
ra(-ów), można w nich wykorzystać pożytecz-
ne polecenie Debounce umieszczone w pro-
gramie głównym. Jak wspominałem, w pole-
ceniu Debounce zawarta jest pętla odliczająca
25ms czasu opóźnienia. W tym czasie działa-
nie głównego programu jest wprawdzie
wstrzymane, ale przerwania są obsługiwane.
Dzięki temu przy sensownie napisanym pro-
gramie także podczas ustawiania zegar nie
„zgubi” czasu, a nawet poprawnie obsłuży
wyświetlacze. Jedynym efektem występowa-
nia przerwań będzie dłuższe niż 25ms odlicza-
nie czasu opóźnienia samego polecenia Debo-
unce – tylko tyle. Podobnie jest z poleceniami
z grupy WAIT – obsługa ewentualnych prze-
rwań przedłuży czas odmierzany w pętli WA-
IT. Tu widać kolejny powód, że poleceniea
grupy WAIT nie zapewniają bezwzględnej
precyzji odmierzania czasu. Tylko przemyśla-
ne wykorzystanie liczników T/C0, T/C1 daje
gwarancję dokładnego odmierzania czasu.
Pomysł Zegara Predatora nadesłał do Re-
dakcji EdW Dariusz Drelicharz z Przemyśla
w roku 2002 (dziś już wiemy, że okazał się
najciekawszym projektem roku 2002). Jak
wiadomo, Predator – bohater filmu i gry
komputerowej, miał na przedramieniu spe-
cjalny przyrząd z tajemniczym wyświetla-
czem. Ty, mając klasyczny zegar, możesz
bardzo łatwo przekształcić go w niecodzien-
ny chronometr, pokazujący czas za pomocą
dziwnych symboli w nader tajemniczy spo-
sób. Tajemniczy dla osób postronnych – Ty
i inni wtajemniczeni szybciutko przyzwycza-
icie się do niecodziennych wskazań.
Idea jest niezmiernie prosta: jest to zwy-
czajny wyświetlacz pokazujący liczbę 0...9
w kodzie dwójkowym 0000...1001. Czterem
dowolnym segmentom wyświetlacza przypo-
rządkowane są więc wartości 8, 4, 2, 1. Przy-
kład z wykorzystaniem segmentów a, b, e,
d pokazany jest na rysunkach 64a i 64b. Jak
słusznie zwrócił uwagę pomysłodawca, Da-
riusz Drelicharz, lepszy efekt powstaje, gdy
aktywne segmenty są nie zaświecane, tylko
gaszone – wygląd takich odwróconych, „ne-
gatywowych” znaków pokazuje rysunek 64c.
Ty możesz przypisać wartościom 8, 4, 2, 1
Ćwiczenie 14
Zegar Predatora
Rys. 63
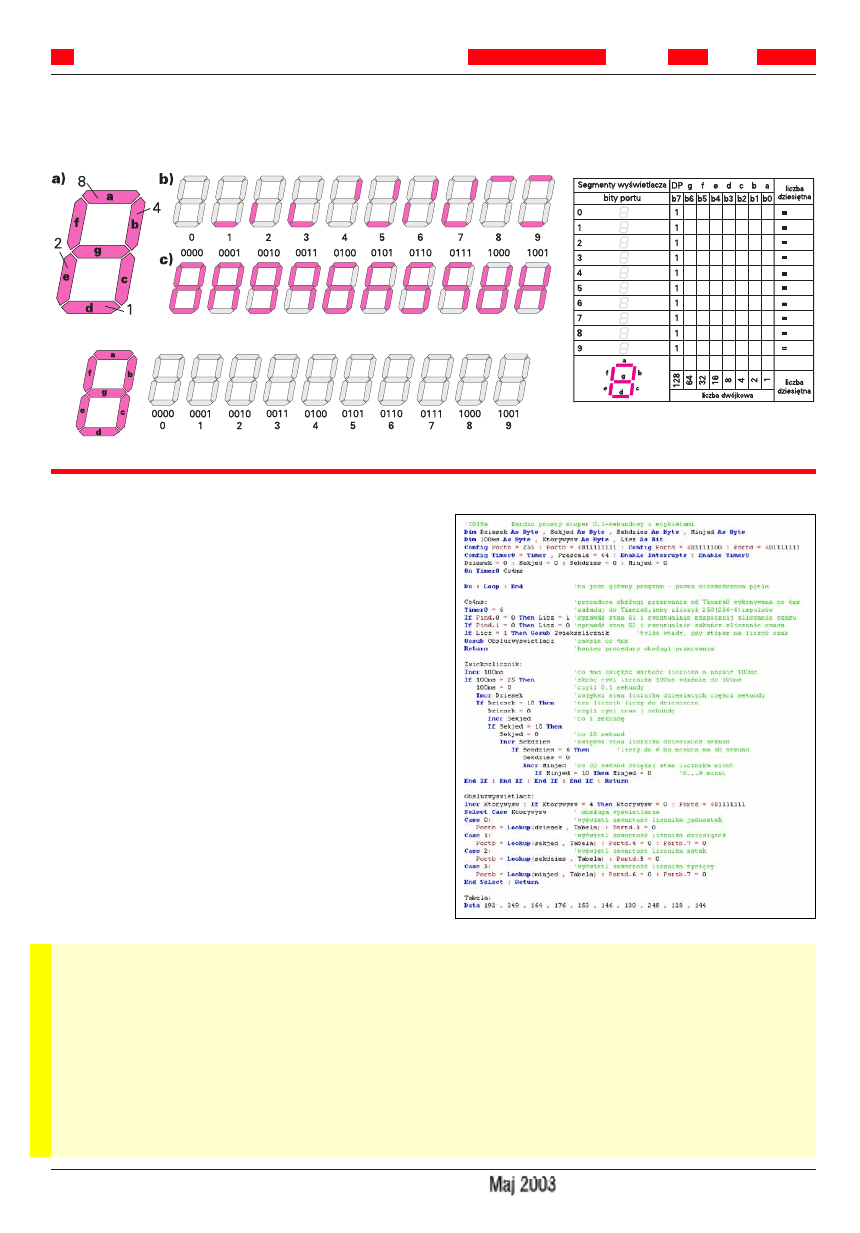
40
Elektronika dla Wszystkich
M1
56
Mikroprocesorowa Ośla łączka
65536 = 64KB
512KB = 524288B
Analogiczna różnica dotyczy przedrostka mega.
W dużych systemach mikroprocesorowych rozmia-
ry pamięci wyrażamy w megabajtach (MB). O ile
1M
Ω = 1000000Ω
o tyle
1MB = (1024*1024)B = 1048576B
Dla programisty i elektronika różnica między
k=1000 a K=1024 oraz M=1000000, M=1048576
nie ma żadnego praktycznego znaczenia.
HEX – system szesnastkowy
W informatyce często korzystamy ze specyficzne-
go zapisu liczb, wykorzystującego system szesna-
stkowy (heksadecymalny). Jest on ściśle spokrew-
niony z systemem dwójkowym. W systemie dwój-
kowym mamy tylko dwie cyfry (0, 1). W systemie
dziesiętnym mamy dziesięć cyfr (0...9). W syste-
mie szesnastkowym cyfr jest 16. Oprócz cyfr 0...9
mamy jeszcze cyfry:
A - dziesięć
B - jedenaście
C - dwanaście
D - trzynaście
E - czternaście
F - piętnaście
Tak jest: A...F to nie literki, tylko cyfry syste-
mu szesnastkowego. Tym samym każdą czterobi-
tową liczbę dwójkową (0...15) można zapisać za
pomocą jednej liczby szesnastkowej (heksadecy-
malnej). Ośmiobitowa liczba dwójkowa (0...255)
w zapisie szesnastkowym będzie miała co najwy-
żej dwie cyfry. Szesnaście cyfr systemu szesnast-
kowego pozwala zapisywać liczby dwójkowe
w bardzo zwięzły sposób (liczbę dwójkową dzieli
się na czterobitowe „kawałki” i pisze szesnastko-
wą reprezentację tych „kawałków”). Pokazuje to
tabela na następnej stronie.
TECHNIKALIA
Zwróć uwagę, że program główny stopera i zegara z poprzednich ćwi-
czeń to pusta nieskończona pętla DO...LOOP, a wszystkie procedury
sprawdzania stanu przycisków, liczenia czasu i obsługi wyświetlacza
umieszczone są za etykietami i są wykonywane po każdym przepełnieniu
odpowiedniego licznika.
Można też na przykład procedury zwiększania zawartości licznika
(liczenia czasu) oraz obsługi wyświetlacza elegancko spakować do pod-
programów pod etykietami Zwiekszlicznik oraz Obsluzwyswietlacz i pro-
gram zmienić według rysunku 67 (C015a.bas). Podoba Ci się taki
przejrzysty sposób z oddzielnymi procedurami?
Taki prymitywny stoper można też zrealizować na wiele innych spo-
sobów. Na przykład na rysunku 68 (C15b.bas) znajdziesz jeszcze inne
rozwiązanie. Zauważ, że tym razem obsługa przerwania to jedynie usta-
wienie pojedynczego bitu o nazwie Flaga. Natomiast wszystkie procedu-
ry obsługi są zawarte w programie głównym. Jeśli znacznik Flaga nie jest
ustawiony, pętla DO...LOOP bezproduktywnie „kręci się w kółko”. Gdy
co 4ms Flaga zostanie ustawiona w efekcie przerwania od Timera0, pro-
gram główny wykrywa to i właśnie program główny jednorazowo wyko-
nuje potrzebne procedury. Może takie pakowanie wszystkiego do progra-
mu głównego wyda Ci się mało eleganckie w porównaniu z poprzednim
programem z etykietami... Wszystkie trzy programy działają w sumie
inne segmenty – możesz je zaznaczyć na „pu-
stym” rysunku 65. Dodatkową pomocą bę-
dzie rysunek 66, gdzie zaznaczysz, które seg-
menty mają świecić, a które nie, oraz wpiszesz
kody-liczby potrzebne do wyświetlenia takich
znaków za pomocą polecenia LOOKUP. Mody-
fikacja programu C013b.bas (rysunek 63) bę-
dzie bardzo mała: zmienisz tylko liczby-kody za
etykietką Tabela. Reszta pozostanie bez zmian.
Rys. 65
Rys. 66
Rys. 67
Rys. 64
Ćwiczenie 15
Tylko dla dociekliwych
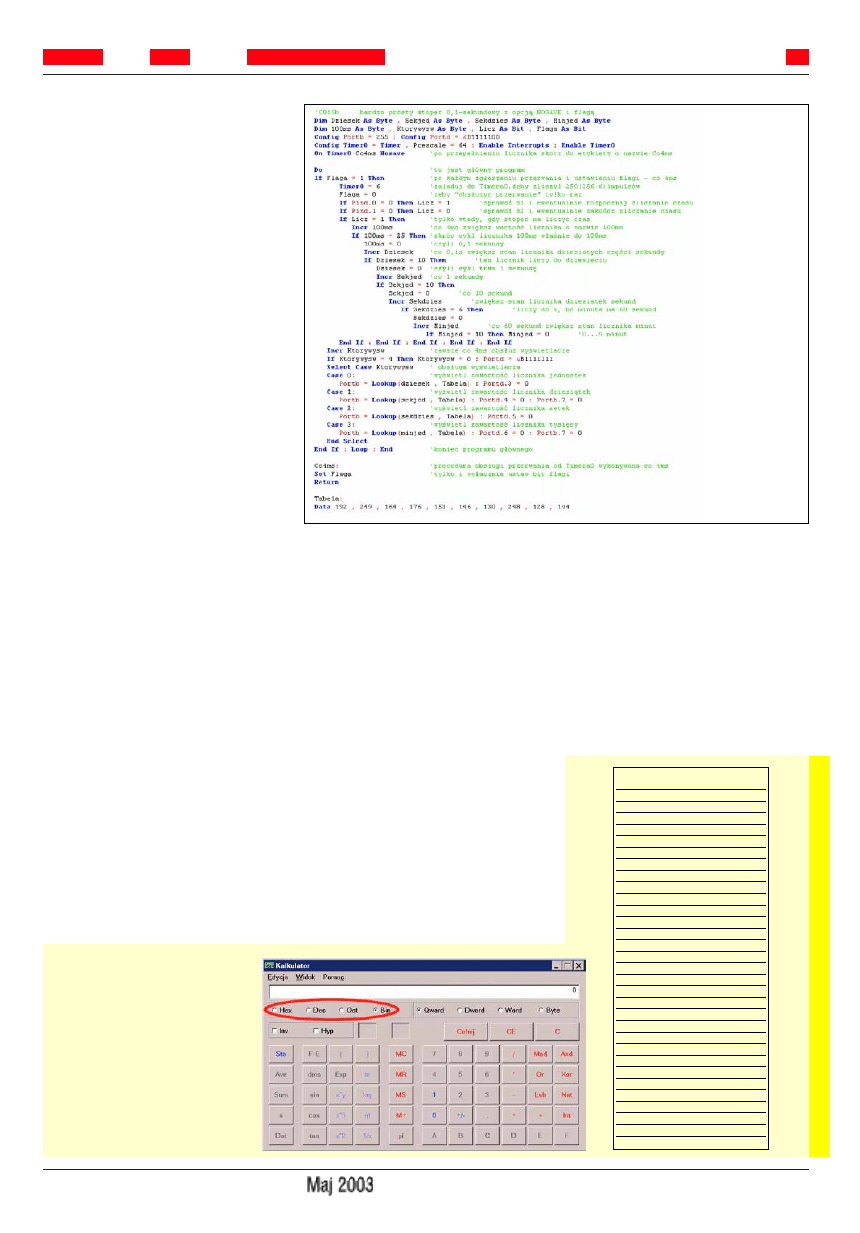
45
Elektronika dla Wszystkich
Mikroprocesorowa Ośla łączka
M1
57
Jeśli chcesz, poszukaj w podręczni-
kach dalszych szczegółów. Nie musisz
wszystkiego rozumieć – liczb w postaci
szesnastkowej na razie nie będziemy wy-
korzystywać. Wspominam o nich, byś nie
przestraszył się „dziwnych” liczb, za-
wierających „litery”. To wcale nie litery,
tylko dodatkowe cyfry szesnastkowego
systemu liczbowego. W razie potrzeby
możesz łatwo przeliczać liczby o różnych
systemach za pomocą komputerowego
kalkulatora z Windows (wybierz Widok –
Naukowy), jak pokazuje rysunek obok.
Ten kalkulator pozwala przedstawiać licz-
bardzo podobnie. Czy warto więc poświęcać
tyle uwagi prymitywnemu stoperowi?
Warto! Możesz sam sprawdzić, że wcze-
śniejszy program z rysunku 59 (C12a.bas) po
kompilacji zajmie w pamięci FLASH proce-
sora 628 bajtów, program z rysunku 67 – 636
bajtów, a program z rysunku 68, tylko 512
bajtów, czyli dokładnie jedną czwartą dostęp-
niej pamięci programu naszego procesora.
Różnica między 636 a 512 bajtów to aż
25%! Już niebawem na własnej skórze się
przekonasz, że te 25% to gra jak najbardziej
warta świeczki. Na pewno już niedługo zda-
rzy się, że napiszesz dłuższy program, który
po kompilacji zajmie więcej niż 2kB. Chodzi
nie o rozmiar programu z rozszerzeniem .bas
– ten może mieć objętość wielokrotnie więk-
szą, zwaszcza z obszernymi komentarzami.
Chodzi o objętość „czystego” programu w ję-
zyku maszynowym, który jest „spuszczany”
do pamięci FLASH. Dłuższy program po
pierwsze nie zmieści się w 2-kilobajtowej pa-
mięci naszego procesora AT90S2313, a po
drugie BASCOM AVR w darmowej wersji
DEMO obsługuje tylko programy mające po
kompilacji co najwyżej 2kB. Nie uda się
więc wykorzystać innego procesora z więk-
szą pamięcią programu – trzeba zakupić peł-
ną wersję BASCOM-a AVR. Gdy skompilo-
wany program ma tylko trochę więcej niż
2kB, możliwość nawet niewielkiego „odchu-
dzenia” to szansa na wagę złota. Co prawda
jest to wyższa szkoła jazdy i na pewno po-
trzebnych umiejętności nie można zdobyć
szybko, jednak ja już na początku chcę Ci za-
sygnalizować tę niezmiernie istotną sprawę.
BASCOM genialnie ułatwia nam życie, po-
nieważ pozwala pisać programy w języku
BASIC, a potem kompilator jedną linijkę na-
szego programu w sobie wiadomy sposób
potrafi zamienić na wiele rozkazów w tak
zwanym języku maszynowym. Niestety, BA-
SCOM jako kompilator nie jest zbyt oszczęd-
ny. Gdy zamienia program na język maszy-
nowy, realizuje zadanie poprawnie, ale za-
zwyczaj ani w sposób najprostszy z możli-
wych, ani w sposób zapewniający najszybszą
realizację programu. Dlatego bardziej zaa-
wansowani konstruktorzy wykorzystują
kompilatory słynnego języka C, dające lep-
sze wyniki (szybsze i krótsze programy w pa-
mięci procesora). A tak naprawdę, to pełną
kontrolę nad programem daje tylko asembler,
czyli język programowania najściślej zwią-
zany z procesorem. Niestety, programowanie
w asemblerze wymaga sporej wiedzy i do-
świadczenia, a dla początkujących optymal-
nym rozwiązaniem jest bez wątpienia BA-
SCOM, pomimo pewnych swych wad. Trzy
ostatnio analizowane programy pokazują, że
także w BASCOM-ie mamy znaczny wpływ
na objętość (a także szybkość wykonywania)
programu.
Dlatego zapamiętaj następujące ważne in-
formacje: dzielenie programu na małe ka-
wałki (procedury) umieszczone za etykieta-
mi, do których odwołuje się za pomocą pole-
ceń GOSUB...RETURN, jest wręcz koniecz-
ne, jeśli jakaś procedura musiałaby być
umieszczana w programie w kilku miej-
scach. Zamiast umieszczać ją w programie
kilka razy i zwiększać tym jego objętość,
warto odwoływać się do niej za pomocą GO-
SUB i etykiety. I takie zmniejszenie objętości
programu to niewątpliwa korzyść ze stoso-
wania etykiet i polecenia GOSUB.
Niemniej wykorzystanie polecenia GO-
SUB dosłownie oznacza odłożenie dotych-
czasowej pracy na bok i zajęcie się procedurą
zza etykiety. Potem po poleceniu RETURN
program od nowa bierze się za przerwaną do-
tychczasową pracę. Tak samo jest, gdy zgło-
szone zostanie przerwanie: trzeba odłożyć do-
tychczasową pracę na bok, a potem do niej
wrócić. Pół biedy, jeśli ta „dotychczasowa
Rys. 68
TECHNIKALIA TECHNIKALIA
Liczba
Liczba Liczba
dziesiętna
dwójkowa
szesnastkowa
0
0000
0
1
0001
1
2
0010
2
3
0011
3
4
0100
4
5
0101
5
6
0110
6
7
0111
7
8
1000
8
9
1001
9
10
1010
A
11
1011
B
12
1100
C
13
1101
D
14
1110
E
15
1111
F
16
1
0000
1
0
17
1
0001
1
1
18
1
0010
1
2
...
...
...
45
10
1101
2
D
...
...
...
107
110
1011
6
B
...
...
...
152
1001
1000
9
8
...
...
...
188
1011
1100
B
C
...
...
...
2153
1000
0110
1001
8
6
9
...
...
...
2799
1010
1110
1111
A
E
F
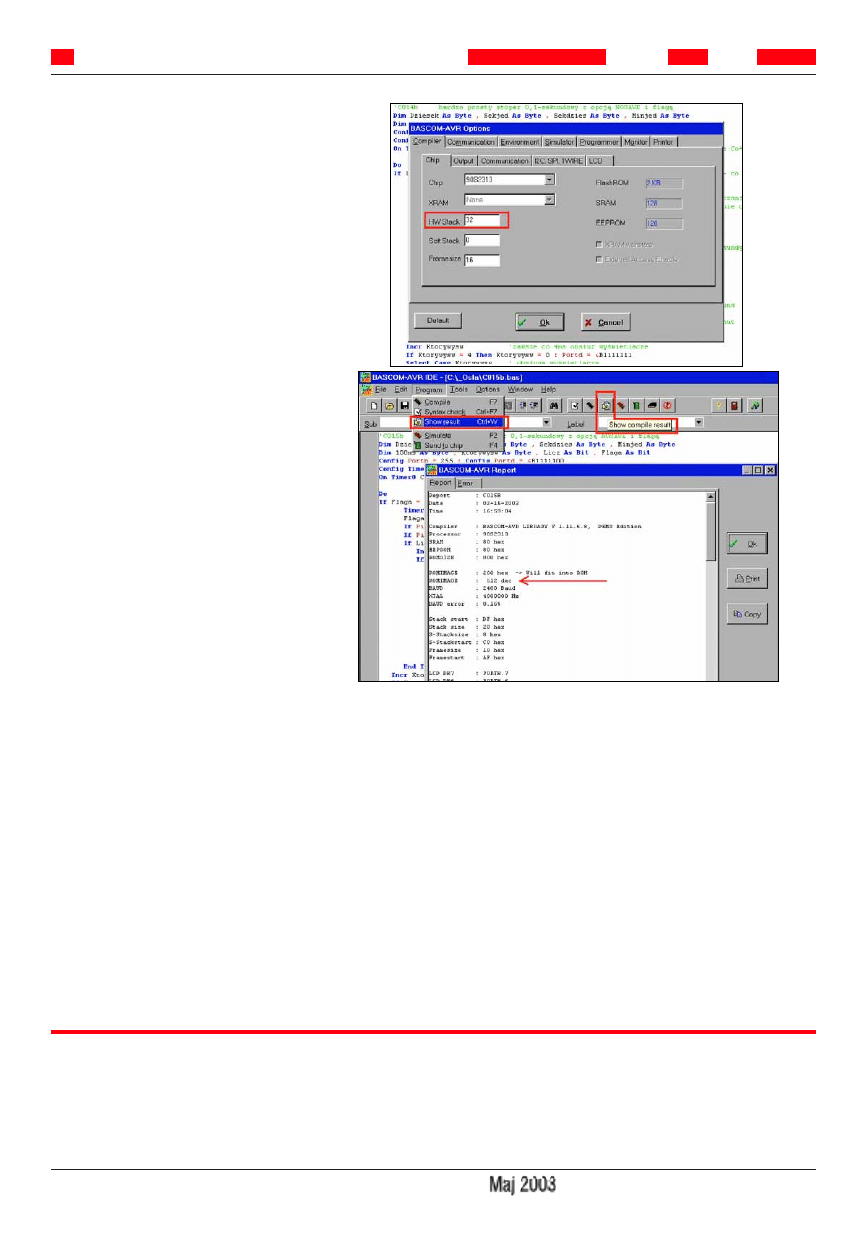
46
Elektronika dla Wszystkich
M1
58
Mikroprocesorowa Ośla łączka
praca” to bezproduktywne „kręcenie się
w kółko” w pustej pętli DO...LOOP. Ale czę-
sto nie jest tak dobrze – odkładając na bok
bardziej skomplikowaną pracę, trzeba niejako
zapamiętać szczegóły z nią związane, żeby
potem do niej precyzyjnie wrócić, czyli od-
tworzyć stan kluczowych rejestrów procesora
sprzed skoku. BASCOM-owe polecenie GO-
SUB...RETURN powoduje, że procesor zapi-
suje w pamięci RAM zawartość kilku kluczo-
wych rejestrów. W tym celu część ze 128 baj-
tów dostępnej pamięci RAM rezerwuje się na
tak zwany stos. Działanie stosu jest opisane
w części Technikalia. Rysunek 69 pokazuje,
gdzie w kompilatorze określamy, ile bajtów
RAM-u rezerwujemy na stos – domyślna
wartość dla stosu sprzętowego (HW-Stack –
Hardware Stack) to jak widać 32 bajty (okien-
ka Soft Stack i Framesize określają, ile dodat-
kowo pamięci RAM zostaje zarezerwowane
na potrzeby tzw. stosu programowego i ram-
ki, co jest potrzebne przy korzystaniu z wy-
świetlacza LCD i tzw. zmiennych lokalnych).
W ten sposób uszczuplamy i tak niezbyt duże
zasoby RAM-u.
Wykorzystanie GOSUB, etykiet jest bar-
dzo wygodne dla programisty, bo znakomicie
zwiększa przejrzystość programu i ułatwia
wprowadzanie zmian. Ale jeśli w programie
zagnieździsz kilka poleceń GOSUB...RE-
TURN, tego odkładania na stos będzie wię-
cej i w kompilatorze trzeba zarezerwować
większą ilość pamięci RAM na stos. Potem
możesz zdziwić się, gdy pojawi się komuni-
kat o braku pamięci RAM lub program nie
będzie pracował poprawnie.
Rezerwacja pamięci na potrzeby stosu to
jedna sprawa. Druga, często równie istotna
kwestia to fakt, że odkładanie na stos i zdej-
mowanie ze stosu zajmuje stosunkowo dużo
czasu, co jest kluczowym problemem w wie-
lu programach, które muszą działać jak naj-
szybciej.
Stosowanie polecenia GOSUB...RE-
TURN ma więc zarówno wielkie zalety, jak
i istotne wady. Z czasem, gdy dokładniej po-
znasz zarówno procesor, jak i sztukę progra-
mowania, będziesz świadomie optymalizo-
wać swoje programy albo by uzyskać jak naj-
krótszy kod, albo żeby pracowały jak naj-
szybciej. To sprawa przyszłości - na razie
wcale nie musisz się tym martwić. Ciesz się,
jeśli Twoje programy poprawnie pracują. Bo
lepszy jest program nieoptymalizowany,
a działający, niż optymalizowany a działają-
cy niepoprawnie.
Choć kwestie optymalizacji to melodia
dalszej przyszłości, jednak już teraz chciał-
bym Ci zwrócić uwagę na ważną sprawę:
podczas obsługi przerwania też następuje
odłożenie kluczowych informacji na stos
i zdjęcie ich po zakończeniu obsługi prze-
rwania - podobnie jak przy poleceniu GO-
SUB...RETURN. To zajmuje czas oraz wy-
maga zarezerwowania pamięci RAM na stos.
Tak dzieje się przy standardowej obsłudze
klasycznego przerwania i często jest to wręcz
koniecznością. Można jednak przyspieszyć
działanie programu i zmniejszyć jego obję-
tość w pamięci FLASH, świadomie pomija-
jąc przy obsłudze przerwania odkładanie na
stos i przywracanie zawartości kluczowych
rejestrów.
Wykorzystałem tu opisaną w Technika-
liach opcję NOSAVE. Właśnie ten sposób
(oraz kilka dodatkowych drobnych zabiegów
– sam sprawdź, jakich) pozwolił zmniejszyć
rozmiar programu z rysunku 68 aż o 25%.
W ramach samodzielnych ćwiczeń porównaj
starannie programy z rysunków 59 oraz 67,
68 (C012a.bas, C15a.bas, C015b.bas)
i zwróć uwagę na opisane różnice. O rozmia-
rach programu w pamieci FLASH przeko-
nasz się po kompilacji (Ctrl+F7, F7, Ctrl+W)
lub Program – Show result. W otwartym
oknie zobaczysz tekst raportu z wieloma in-
formacjami, między innymi właśnie o wiel-
kości programu. Na rysunku 70 czerwoną
strzałką zaznaczyłem linię z tą informacją.
Teraz serdecznie zachęcam, żebyś w ra-
mach zajęć domowych sam napisał lub zmo-
dyfikował kilka programów, żeby wykony-
wały to samo zadanie, ale różnie wykorzy-
stywały przerwanie i polecenia GOSUB.
Sprawdzaj za każdym razem objętość pro-
gramu.
A co byś powiedział na realizację zegara, po-
kazaną na rysunku 71 (C016a.bas)?
Co sądzisz o takich licznikach?
Na pewno zegar będzie zliczał poprawnie, bo
liczniki Sekundy, Minuty i Godziny to zmienne
bajtowe mogące zliczać w zakresie 0...255. Tylko
jak zobrazować wynik, jeśli jedną liczbę dwój-
kową z zakresu 0...59 z jednego licznika ma-
ją reprezentować dwie cyfry na wyświetlaczu?
Rys. 69
Rys. 70
Ćwiczenie 16
Konwersja BCD
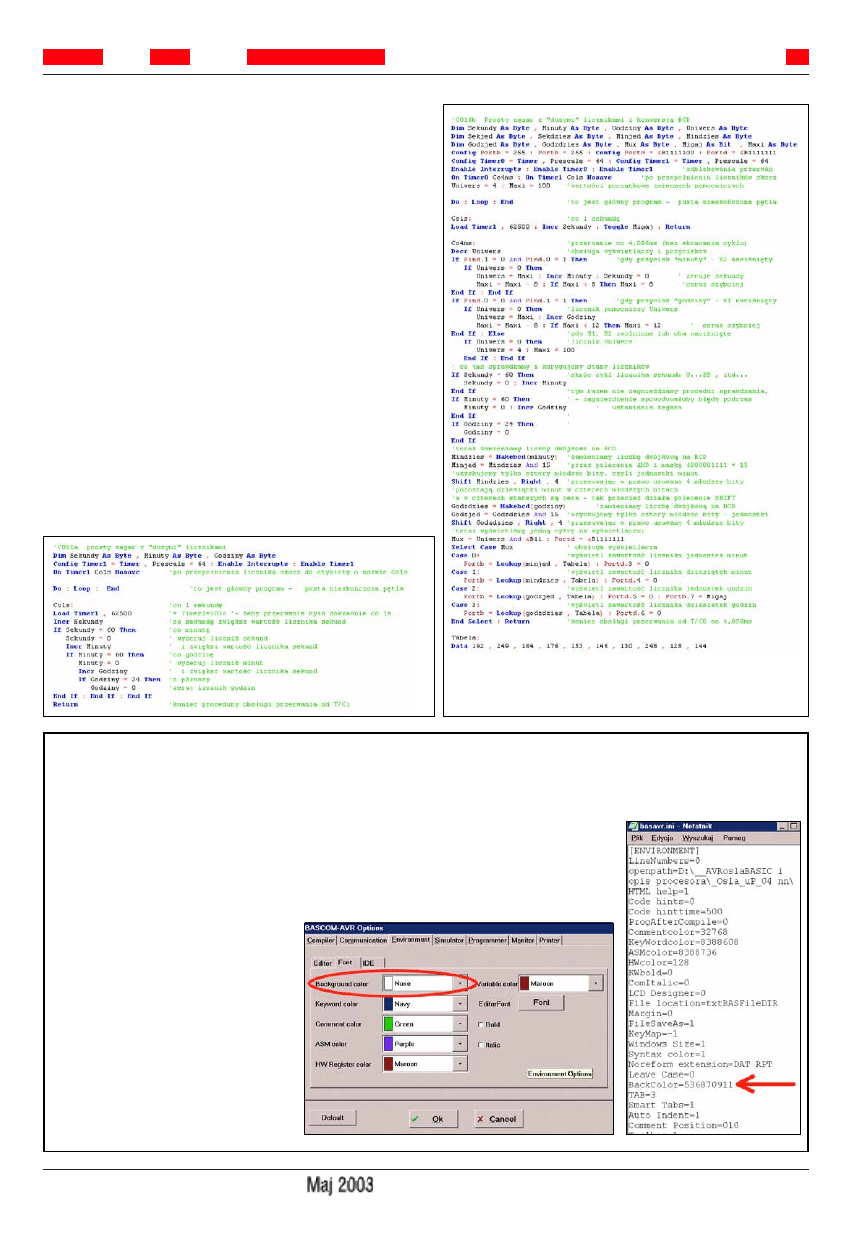
47
Elektronika dla Wszystkich
Mikroprocesorowa Ośla łączka
M1
59
Czy masz jakiś pomysł?
Wbrew pozorom, nie trzeba tu wgłębiać się w zasady arytmetyki
dwójkowej i szukać sposobów konwersji. BASCOM umożliwia dzie-
cinnie łatwe zobrazowanie na dwóch siedmiosegmentowych wyświetla-
czach liczby dwójkowej, większej od 9, byle nie była większa od 99.
Wykorzystamy do tego celu polecenie MAKEBCD. Więcej informacji
na temat tego polecenia znajdziesz w ELEMENTarzu. W każdym razie
zamienia ono „zwyczajną” liczbę dwójkową z zakresu 0...99 na dwie
czterobitowe liczby reprezentujące jednostki i dziesiątki. Trzeba więc
„zwyczajną” liczbę dwójkową przekonwertować na format BCD z uży-
ciem polecenia MAKEBCD, a potem „wydłubać” kolejno obie cztero-
bitowe liczby reprezentujące jednostki i dziesiątki. Rysunek 72
(C016b.bas) pokazuje jeden ze sposobów zastosowany w programie ze-
gara: najpierw konwertujemy liczbę dwójkową na BCD do zmiennej
Dziesiatki, potem za pomocą maski z użyciem operatora logicznego
AND „wydłubujemy” cztery młodsze bity, czyli Jednostki – liczbę z za-
kresu 0...9 reprezentującą jednostki. Potem po prostu przesuwany za-
wartość zmiennej Dziesiatki o cztery miejsca w prawo za pomocą roz-
kazu SHIFT. Cztery bity reprezentujące liczbę dziesiątek zostaną prze-
sunięte na niższe pozycje, dając liczbę z zakresu 0...9, a do czterech
starszych bitów bajtu Dziesiatki zostaną wprowadzone zera. Zapamię-
taj ten interesujący sposób. W ramach zajęć domowych możesz napisać
nowe lub zmodyfikować wcześniejsze programy wykorzystując polece-
nie MAKEBCD według rysunku 72.
Piotr Górecki
Jeden z Czytelników napisał:
Z wielkim zainteresowanim czytam Pana
artykuły n/t programu BASCOM AVR i nau-
ki programowania mikroprocesorów AT. (...)
Mam jednak pewien problem natury tech-
nicznej. Po uruchomieniu BASCOM-a wy-
gląd ekranu jest taki sam jak na rysunkach
drukowanych w EdW. Natomiast kiedy za po-
mocą polecenia FILE, OPEN otwieram zapi-
sany w NOTATNIKU program, ekran zmie-
nia kolor na czarny. Sam tekst programu za-
chowuje prawidłowe kolory, ale na czarnym
tle jest bardzo źle widoczny. (...) Proszę mi
poradzić, co powinienem zrobić, aby uzyskać
taki wygląd ekranu jak w Pana artykułach.
Jest to dla mnie bardzo ważne, ponieważ
z uwagi na wadę wzroku długie wpatrywanie
się w tak niewyraźny obraz jest dla oczu
bardzo męczące i mocno ogranicza czas, ja-
ki mogę spędzać przy bardzo mnie interesu-
jącym BASCOM-ie.
Serdecznie proszę o możliwie szybką od-
powiedź i pozdrawiając dziękuję za bardzo
zrozumiały i przystępny dla nowicjuszy spo-
sób, w jaki Pan przedstawia podstawy no-
woczesnej elektroniki.
Krzysztof
Kolory ustawia się po poleceniach
Options \ Environment na zakładce Fonts
jak pokazuje załączony rysunek obok.
Czerwono zaznaczyłem okienko, gdzie
ustawia się kolor tła.
Informacje te są przechowywane w pliku
Basavr.ini w katalogu C:\Windows. Na
drugim załączonym rysunku zaznaczona
jest linia odpowiedzialna za kolor tła.
Rys. 71
Rys. 72
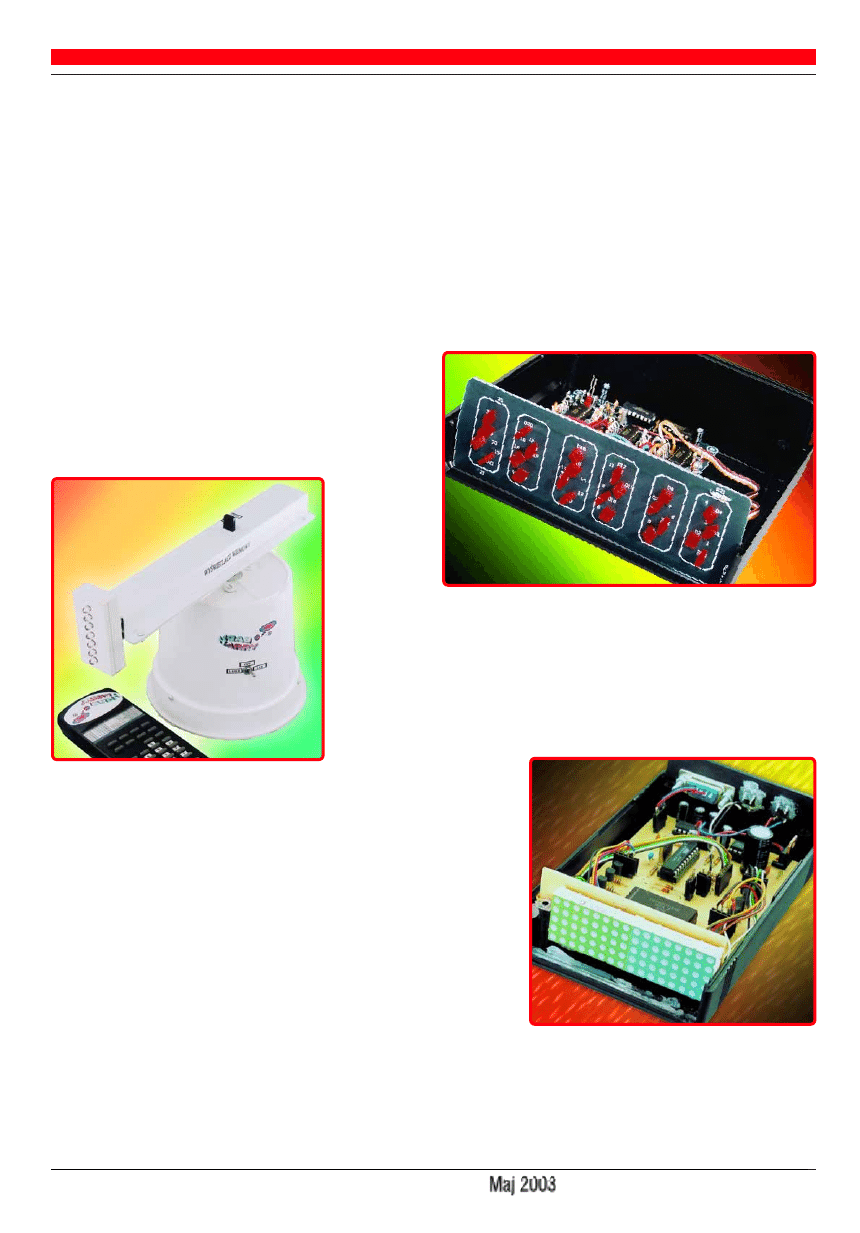
48
Elektronika dla Wszystkich
W EdW 12/2002 ogłoszony został wielki konkurs na najlepszy projekt opublikowany w Elektronice dla Wszystkich, opracowany przez
osobę spoza grona redakcyjnego.
Należało wybrać trzy najbardziej innowacyjne, najbardziej interesujące i pomysłowe projekty opublikowane w EdW w dwunastu nume-
rach z 2002 roku. Konkurs ma służyć ujawnianiu i promowaniu utalentowanych Czytelników, nieprzeciętnych twórców, w tym uczestników
Szkoły Konstruktorów. Z przyjemnością informujemy, że
najlepszy projekt roku 2002
to opublikowany w numerze
październikowym
Zegar Predatora
Autorem tego projektu jest Dariusz Drelicharz z Przemyśla.
Zegar został oceniony przez Was jako połączenie przydatności,
pomysłowości, edukacji i rozrywki. Idea Zegara Predatora istotnie
jest rewelacyjna!
II miejsce
zajął przedstawiony w EdW 11/2002
Wyświetlacz widmowy
Autorem jest Łukasz Hrapek z Sanoka. Według opinii z ankiet - Wyświetlacz wid-
mowy to niezwykle ciekawy i dopracowany projekt, pozwalający na poznawanie możli-
wości współczesnej elektroniki i mechaniki.
III miejsce
zajęła opisana w EdW 8/2002
Programowana tablica świetlna
Autorem jest Michał Stach z Kamionki Małej. Z listów i e-maili, dotyczących
nominacji tego projektu do nagrody, wypłynął podstawowy wniosek: „Za staranne
wykonanie i praktyczne wykorzystanie Bascoma”.
A oto kolejno projekty, które otrzymały najwięcej głosów:
4. Transformator Tesli (EdW 9,10/02) – Łukasz Bajda i Radosław Szymczycha.
5. Sterownik pieca węglowego (EdW 12/02) – Krzysztof Nawacki.
6. Sonar – dalmierz ultradźwiękowy (EdW 7/02) – Olaf Janik.
7. UPS – zasilacz awaryjny (EdW 11/02) – Dariusz Knull.
8. Zasilacz symetryczny (EdW 9/02) – Marcin Wiązania.
9. Projektor laserowy (EdW 5/02) – Bartłomiej Stróżyński.
10. Sterownik (niekoniecznie) akwariowy (EdW 11/02) – Remigiusz Idzikowski.
Zwycięzcy konkursu, Dariusz Drelicharz, Łukasz Hrapek i Michał Stach, otrzymują oscyloskopy HPS10 firmy Velleman.
Wśród uczestników ankiety-konkursu rozlosowaliśmy nagrody w postaci kitów AVT i książek. Otrzymają je: Rafał Burszewski z Tcze-
wa, Karol Pietruszewski z Poznania, Tomasz Kaczmarczyk z Krakowa, Stefan Latko z Udrzyna, Jakub Podgórski z Wałbrzycha,
Jan Stanisławski z Sanoka, Marcin Komisarz z Rzeszowa, Krzysztof Stanowiec z Koszalina, Bartłomiej Warzecha z Hurko, Krzysztof
Kunka z Giżycka i Anna Nowakowska z Jaworza. Gratulujemy zwycięzcom konkursu, wszystkim wyróżnionym i jednocześnie zachęcamy
do dalszej współpracy z redakcją EdW zarówno Autorów interesujacych projektów, jak i wszystkich Czytelników.
NAJLEPSZY PROJEKT ROKU 2002
konkurs im. Zbigniewa Raabe
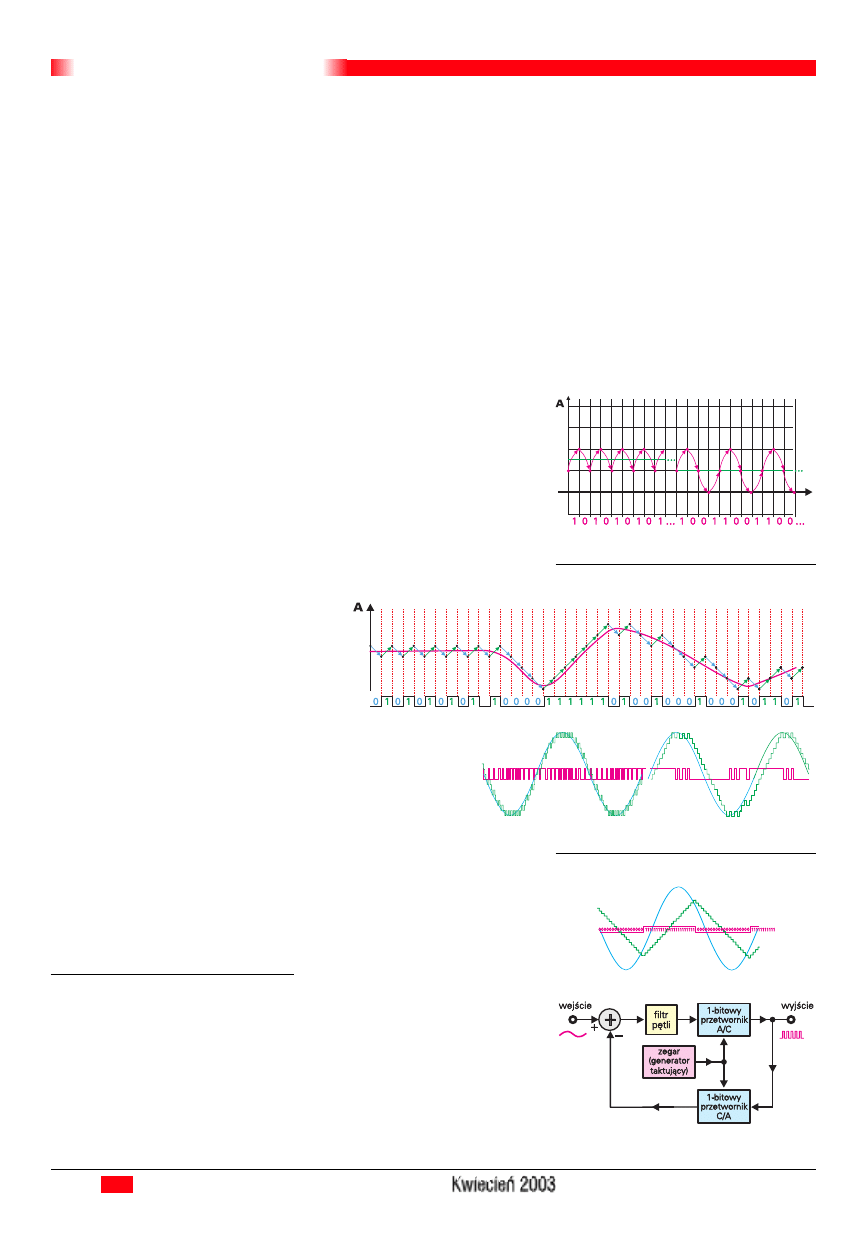
B
B
e
e
z
z
k
k
o
o
m
m
p
p
r
r
o
o
m
m
i
i
s
s
o
o
w
w
a
a
j
j
a
a
k
k
o
o
ś
ś
ć
ć
a
a
u
u
d
d
i
i
o
o
,
,
czyli
d
d
r
r
o
o
g
g
a
a
d
d
o
o
D
D
i
i
r
r
e
e
c
c
t
t
D
D
i
i
g
g
i
i
t
t
a
a
l
l
C
C
h
h
a
a
i
i
n
n
Dlaczego przetwornik 1-bitowy jest lepszy od 16-bitowego
Przebieg o stałej wartości da na wyjściu
przetwornika ciąg na przemian zer i jedynek
– zobacz rysunek 13. Same jedynki infor-
mują, że przebieg rośnie bardzo szybko, sa-
me zera – że bardzo szybko maleje. Przykła-
dowy przebieg analogowy oraz sygnał cy-
frowy uzyskany zeń za pomocą przetworni-
ka delta pokazany jest na rysunku 14.
Szczegóły znów nie są tu istotne, w każdym
razie: 1-bitowy przetwornik DPCM nazywa-
ny jest przetwornikiem delta, a przestawio-
na metodą – modulacją delta () lub modu-
lacją PWM (pulse width modulation). Prze-
biegi o różnym nachyleniu zostaną przetwo-
rzone na ciągi zer i jedynek, gdzie o nachy-
leniu przebiegu informuje stosunek liczby
zer do liczby jedynek. Warunkiem prawi-
dłowego działania jest duża częstotliwosć
próbkowania – musi ona być wielokrotnie
większa od częstotliwości przetwarzanego
sygnału, jak pokazuje rysunek 15. Jeśli czę-
stotliwość próbkowania będzie za mała (albo
przyrost, kwant zmian będzie za mały) prze-
twornik delta „nie nadąży” za zmianami sy-
gnału i wynik będzie błędny, jak pokazuje
rysunek 16.
Nietrudno się domyślić, że z tak przetwo-
rzonego sygnału (pochodnej funkcji) można
łatwo odtworzyć funkcję oryginalną w pro-
stym przetworniku cyfrowo-analogowym,
zawierającym integrator (układ całkujący).
Także i tu dokładność uzyskiwana przy re-
konstrukcji przebiegu zależna jest oczywi-
ście od częstotliwości próbkowania podczas
kodowania – czym wyższa częstotliwość
próbkowania, tym lepiej.
PDM, SDM
Przedstawiona w poprzednim fragmencie,
znana od wielu lat metoda PWM, choć uży-
teczna, ma istotne wady. W latach 60. ubie-
głego wieku opracowano podobny, ale ulep-
szony sposób przetwarzania analogowo-cy-
frowego nazywany PDM (pulse density mo-
dulation). Także i tu występuje przetwornik
1-bitowy, czyli najzwyklejszy komparator,
a dla uzyskania dokładności przetwarzania,
częstotliwość próbkowania też musi być
wielokrotnie większa od najwyższej czę-
stotliwości sygnału. Metoda przetwarza-
nia PDM nazywana jest też bardzo często
metodą sigma-delta (-). Zarówno sama na-
zwa, jak i liczne opisy działania skutecz-
nie zniechęcają wielu od zajmowania się
tymi interesującymi i nad wyraz pożytecz-
nymi przetwornikami. Rzeczywiście pod-
stawy teoretyczne i niezbędny aparat ma-
tematyczny wręcz przerażają. Okazuje się
jednak, że ogólna zasada działania jest ła-
twa do zrozumienia, choć
rzeczywiście szczegóły ich
budowy mogą przestraszyć
mniej zaawansowanych.
Oto garść wyjaśnień:
Można przyjąć w upro-
szczeniu, że w metodzie
PWM na przetwornik A/C (komparator)
podawana jest różnica między wartościa-
mi aktualnej i poprzedniej próbki sygnału
wejściowego (w praktyce realizacje by-
wają inne, ale to nieistotny szczegół).
W każdym razie kluczową rolę gra ta róż-
nica i stąd nazwa przetworniki i modulacja
delta (- delta). I to jest jasne i oczywiste.
Nieco trudniej jest z metodą PDM, zwaną
sigma-delta (-). Można powiedzieć, że tu
też przetwornik (komparator) określa róż-
nicę (- delta) między wartością aktualną
sygnału, a sumą ( - sigma) wartości po-
przednich próbek wyjściowych. Można
przyjąć w uproszczeniu, że na wyjściu
prostego przetwornika - w danej chwili
może pojawić się tylko jedna z dwóch
wartości: 0, 1, wskazująca, czy w tej
chwili sygnał wejściowy jest większy czy
64
Elektronika dla Wszystkich
M
E
U
To warto wiedzieć
c
c
z
z
ę
ę
ś
ś
ćć
ćć
33
33
Rys. 15
Rys. 16
Rys. 13
Rys. 14
Rys. 17
To warto wiedzieć
mniejszy od scałkowanej sumy poprzednich
próbek. Na przetwornik analogowo-cyfrowy
typu sigma-delta podawany jest sygnał ana-
logowy, a sygnałem wyjściowym jest ciąg
impulsów, podobnie jak w przetworniku del-
ta (porównaj rysunek 14). Uproszczony
schemat blokowy prostego przetwornika
A/C typu pokazany jest na rysunku 17. Wy-
gląda co najmniej tajemniczo. Mniej dziw-
nie prezentuje się schemat z rysunku 18 po-
kazujący, że sumator i filtr pętli to zwyczaj-
ny integrator (układ całkujący, czyli uśre-
dniający, będący prościutkim filtrem dolno-
przepustowym) ze wzmacniaczem operacyj-
nym, że 1-bitowy przetwornik A/C to naj-
zwyczajniejszy komparator z dodatkowym
przerzutnikiem D pełniącym rolę pamięci,
a przetwornik C/A to zwyczajny przełącz-
nik, podający na jedno z wejść intergratora
dodatnie lub ujemne napięcie odniesienia,
zależnie od stanu logicznego na wyjściu
przetwornika. Najogólniej biorąc, integrator
związany jest z określeniem sigma, a kom-
parator – delta.
Taki schemat może okazać się trudny do
dokładnej analizy, niemniej podstawowa
zasada działania jest beznadziejnie prosta.
Zacznijmy od przetwornika C/A – jego dzia-
łanie można zobrazować przykładem ciemne-
go pokoju i lampy. Mając zwykłą lampę ze
zwykłym wyłącznikiem, można włączyć
światło (stan 1) lub wyłączyć światło (stan 0).
Wyłącznik jest tutaj najprawdziwszym 1-bi-
towym przetwornikiem cyfrowo-analogo-
wym.
Czy mając taki 1-bitowy przetwornik,
można uzyskać pośrednie wartości oświetle-
nia, od całkowitej ciemności do pełnej jasno-
ści lampy?
Oczywiście! Wystarczy włączać i wyłą-
czać światło z odpowiednio dużą częstotli-
wością, by oko nie dostrzegło migotania.
Dokładnie tak samo działa przetwornik
C/A, czyli przełącznik z rysunków 17 i 18.
Jeśli będzie odpowiednio szybko przełącza-
ny, pozwoli na wyjściu filtru uśredniającego
uzyskać dowolne napięcie w zakresie
–Uref...+Uref. Ilustruje to rysunek 19. Sa-
me jedynki na wejściu cyfrowym A ozna-
czają ciągłe dołączenie napięcia +Uref do
filtru RC. Na wyjściu B pojawi się pełne na-
pięcie +Uref. Podanie na wejście A na prze-
mian zer i jedynek da na wyjściu B napięcie
równe połowie napięcia między +Uref
i –Uref, czyli potencjał masy. Ogólnie bio-
rąc, wartość napięcia na wyjściu B zależy
od stosunku liczby zer do liczby jedynek.
W przetworniku z rysunku 18 zastosowany
jest nie prościutki filtr RC, tylko integrator
ze wzmacniaczem operacyjnym. Oprócz ro-
li filtru uśredniającego pełni on dodatkowo
rolę sumatora. Ściślej biorąc, zgodnie z ry-
sunkiem 17 jest to układ odejmujący napięcie
sygnału wejściowego i sygnału z przetworni-
ka C/A. Tym samym na wejście komparatora
podawane jest napięcie będące uśrednioną
różnicą oryginalnego sygnału i sygnału z we-
wnętrznego przetwornika C/A. Należy po-
traktować to (niewielkie) napięcie jako sygnał
błędu. I właśnie ten sygnał błędu, a konkret-
nie jego biegunowość, zadecyduje o tym, jaki
będzie stan wyjściowy przetwornika po na-
stępnym impulsie zegarowym. Ten stan, gdy
pojawi się na wyjściu, dzięki obecności prze-
twornika C/A, skoryguje średnie napięcie na
wyjściu integratora i następny stan na wyjściu
będzie zależał od biegunowości aktualnego
napięcia błędu. Na wyjściu pojawia się ciąg
zer i jedynek, których
stosunek jest wyzna-
czony przez napięcie
wyjściowe. Uproszczo-
ny przykład pokazany
jest na rysunku 20.
Wyraźnie widać, że
niedoskonałość wynika
z niezbyt dużej często-
tliwości próbkowania.
Dokładność przetwa-
rzania i późniejszego
rekonstruowanego sy-
gnału zależy od często-
tliwości próbkowania:
czym wyższa, tym le-
piej. Co niezmiernie
ważne, wspomniane
wcześniej szumy (rekwantyzacji) są w tym
przypadku przesunięte w górę, w pasmo leżą-
ce znacznie powyżej pasma akustycznego.
Przetwarzanie sigma-delta zapewnia też zna-
komitą liniowość i ma też inne ważne zalety.
W każdym razie koniecznie należy zau-
ważyć, iż w przetworniku typu delta stosu-
nek liczby zer do liczby jedynek w ciągu
wyjściowym informuje o nachyleniu prze-
biegu wejściowego. W przetworniku sigma-
delta – nie o nachyleniu, tylko o amplitu-
dzie, co potwierdza rysunek 21. I to jest bar-
dzo istotne.
I oto doszliśmy do systemu SACD. Dal-
sze szczegóły na temat tego systemu zawarte
są w ostatniej, czwartej częsci artykułu, która
ukaże się za miesiąc.
Robert Bandyk
65
Elektronika dla Wszystkich
M
E
U
Rys. 18
Rys. 19
Rys. 20
Rys. 21
Document Outline
- edw_2003_05_s10
- edw_2003_05_s12
- edw_2003_05_s13
- edw_2003_05_s18
- edw_2003_05_s23
- edw_2003_05_s26
- edw_2003_05_s28
- edw_2003_05_s30
- edw_2003_05_s38
- edw_2003_05_s48
- edw_2003_05_s64
Wyszukiwarka
Podobne podstrony:
EdW 05 2003
EdW 09 2003
EdW 04 2003
Rozwazania ( 05 2003
EdW 08 2003
MEDYTACJA 0 05 2003
EdW 03 2003
Rozwazania & 05 2003
EdW 02 2003
EdW 11 2003
EdW 07 2003
EdW 01 2003
EdW 12 2003
MEDYTACJA ' 05 2003
EdW 05 2002
MEDYTACJA ( 05 2003
EdW 10 2003
MEDYTACJA 1 05 2003
EdW 06 2003
więcej podobnych podstron