Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
28
4. TEORIA STANU NAPRĘŻENIA
4.1. Definicja naprężenia
W poprzednim rozdziale zdefiniowaliśmy siłę wewnętrzną w danym punkcie i przekroju.
Stwierdziliśmy też, że dokonując podziału bryły na dwie części możemy analizować
zachowanie się tylko jednej części pod warunkiem, że do każdego punktu przekroju
przyłożymy siłę wewnętrznych z jaką oddziałują na niego wszystkie punkty odrzuconej
części. Siły te tworzą w przekroju nieskończony układ sił wewnętrznych, który jest bardzo
ważny w analizie zachowania się konstrukcji i będzie przedmiotem szczegółowych rozważań
w toku dalszych wykładów.
Aby móc dokonywać analizy układu sił wewnętrznych należy precyzyjnie zdefiniować ich
miarę którą nazwiemy naprężeniem.
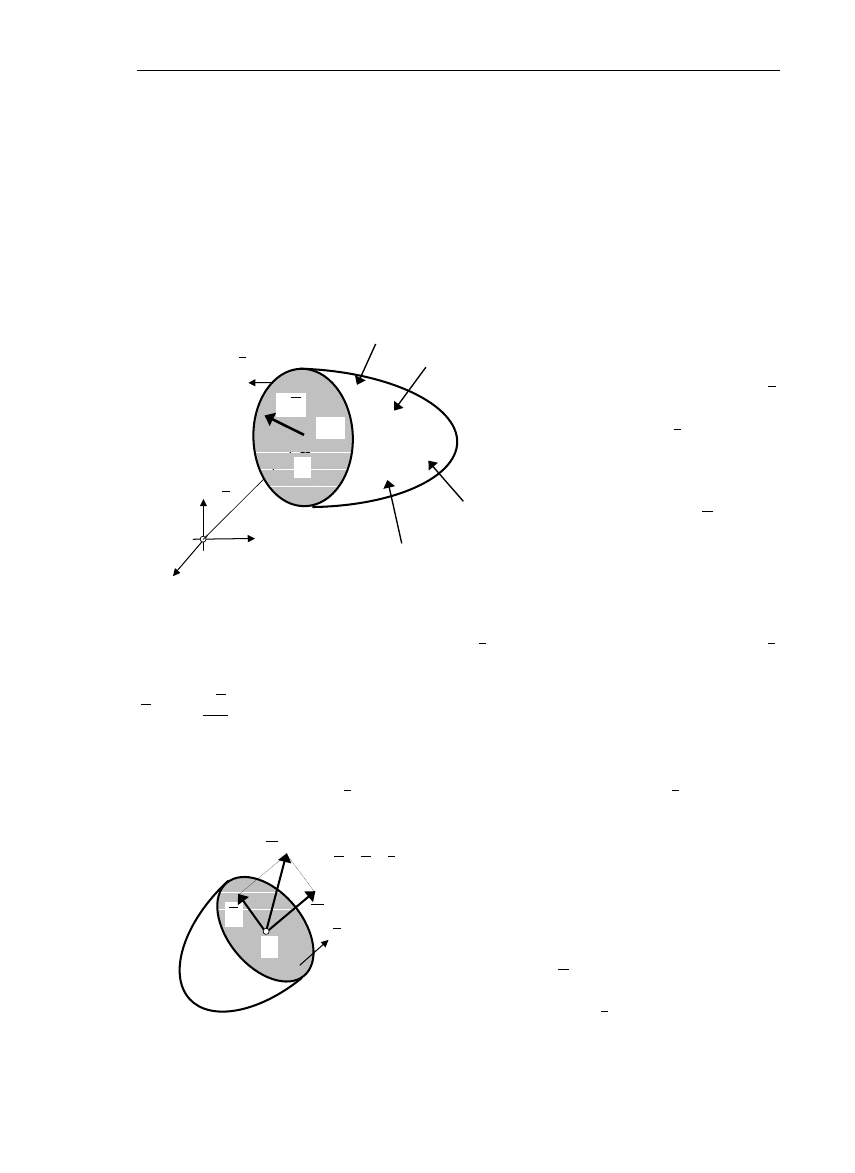
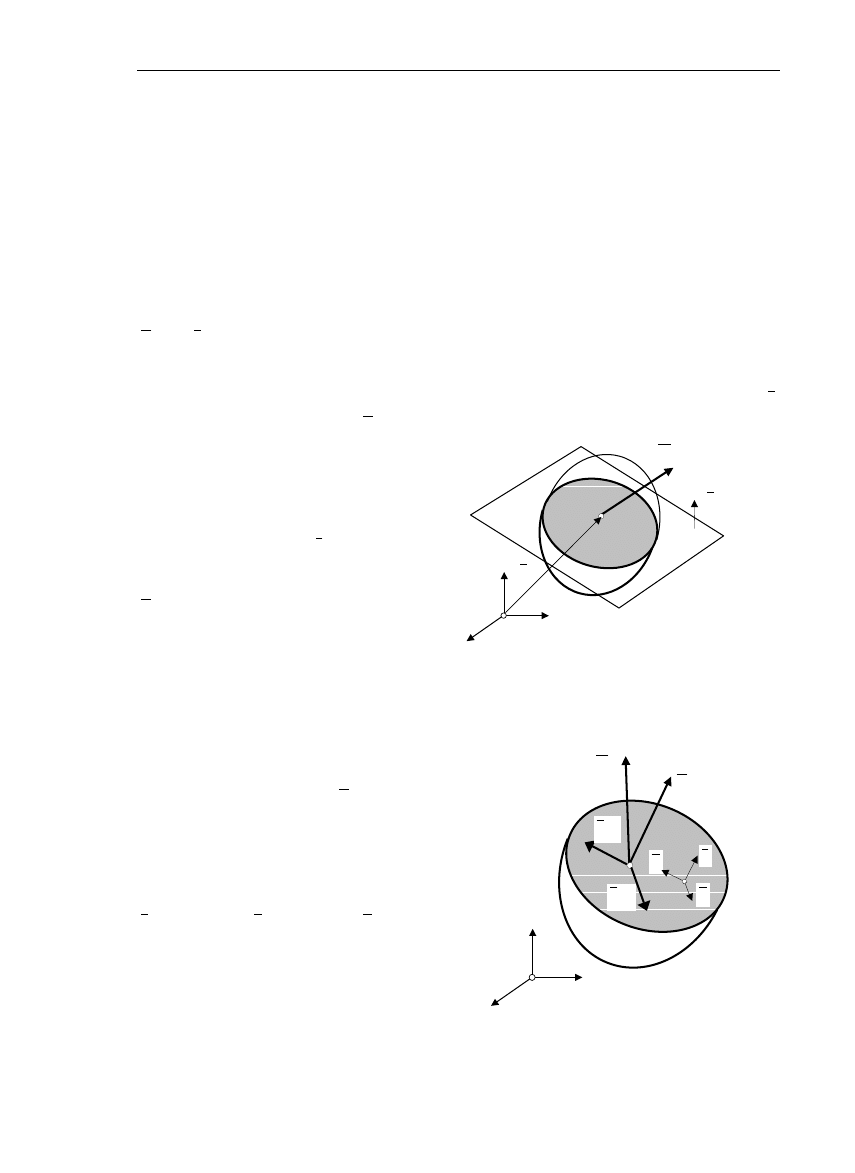
W tym celu rozważmy dowolny,
pokazany na rys. 4.1, przekrój bryły
płaszczyzną o wersorze normalnym
v
przechodzącą przez dowolny punkt C
o wektorze wodzącym r . Do każdego
punktu
płaszczyzny
przekroju
przyłożona jest siła wewnętrzna.
Wydzielmy wokół punktu C element
powierzchni
∆
A.
Niech
P
∆
oznacza
sumę sił wewnętrznych przyłożonych
do punktów powierzchni
∆
A.
Przyjmiemy definicję:
naprężeniem w punkcie o wektorze wodzącym r na powierzchni przekroju o normalnej v
nazywamy wektor
A
P
p
A
∆
∆
∆
0
lim
→
=
.
(4.1)
Fizycznie naprężenie jest gęstością sił wewnętrznych i jak widać ze wzoru (4.1) w ogólności,
podobnie jak siła wewnętrzna, w bryle (konstrukcji) jest funkcją wektorową dwóch wektorów
, wektora wodzącego punktu r i wersora normalnego płaszczyzny przekroju v .
W ogólności kierunek wektora naprężenia
jest dowolny w odniesieniu do płaszczyzny na
której występuje. Możemy go rozłożyć, jak
pokazuje rys. 4.2, na dwie składowe których
kierunki są normalne i styczne do przekroju
nazywając je odpowiednio naprężeniem
normalnym i stycznym. Tak więc naprężenie
normalne
σ to składowa naprężenia
prostopadła do płaszczyzny przekroju a
naprężenie styczne
τ to składowa naprężenia
styczna do płaszczyzny przekroju.
Rys. 4.2
C
σ
τ
v
p
τ
σ
+
=
p
Rys. 4.1
v
X
Z
Y
r
P
∆
A
∆
C
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
29
4.2. Stan naprężenia w punkcie
Stan naprężenia w punkcie to nieskończony zbiór wektorów naprężeń przyporządkowanych
wszystkim płaszczyznom przecięcia bryły, przechodzących przez ten punkt.
Mówimy, że znamy stan naprężenia w bryle jeśli znamy stan naprężenia w każdym jej
punkcie.
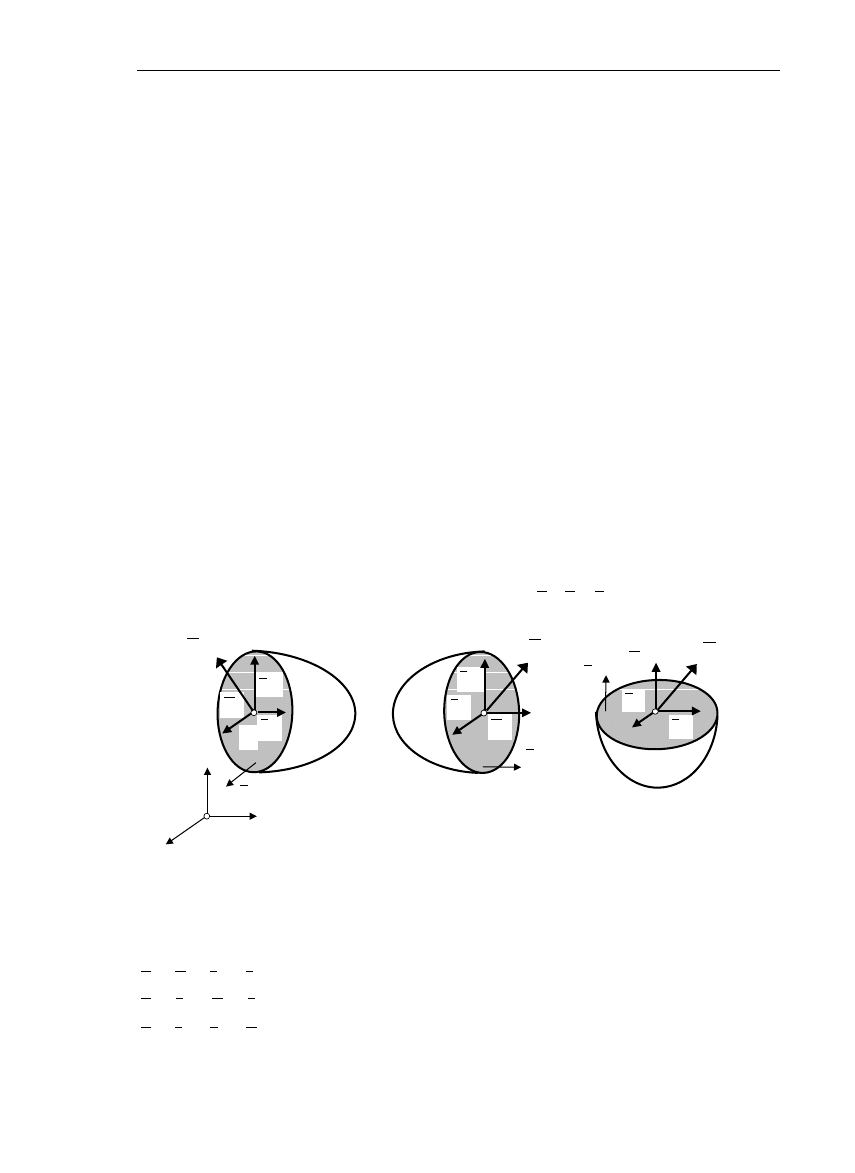
Rozróżniamy trzy rodzaje stanów naprężenia w punkcie: jednoosiowy, płaski i przestrzenny.
Jednoosiowy stan naprężenia występuje wówczas, gdy wektory naprężeń przyporządkowane
dowolnym płaszczyznom cięcia bryły w danym punkcie mają ten sam kierunek.
Płaski stan naprężenia występuje wówczas, gdy wektory naprężeń przyporządkowane
dowolnym płaszczyznom cięcia bryły w danym punkcie leżą w jednej płaszczyźnie
(płaszczyźnie stanu naprężenia).
Przestrzenny stan naprężenia występuje wówczas, gdy wektory naprężeń przyporządkowne
dowolnym płaszczyznom cięcia bryły w danym punkcie są w ogólności różne (mają różne
długości, kierunki i zwroty).
Każdy z tych charakterystycznych stanów naprężenia w punkcie, w całej bryle może być
jednorodny lub niejednorodny. Jednorodny jest wówczas gdy nie zależy od wyboru punktu.
Z definicji stanu naprężenia w punkcie jest zrozumiałe, że jego znajomość jest nieodzowna
przy analizie tego co się dzieje w danym punkcie ciała poddanego działaniu układu sił
zewnętrznych. To oznacza, że musimy znać wektory naprężeń na każdej dowolnej
płaszczyźnie cięcia bryły w danym punkcie a przy analizie zachowania się konstrukcji w
każdym jej punkcie.
4.3. Macierz naprężeń. Graficzny obraz macierzy naprężeń
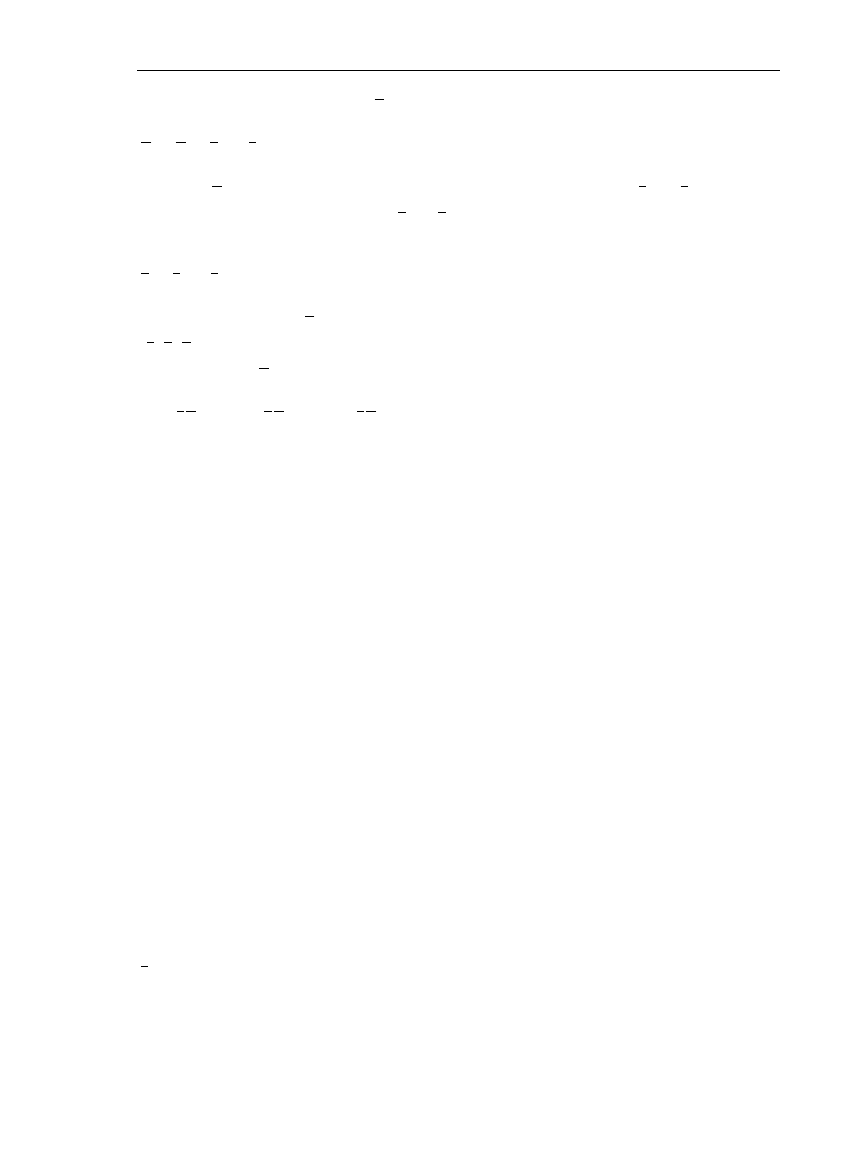
Dokonajmy przekroju rozważanej bryły w dowolnie wybranym punkcie C trzema
płaszczyznami prostopadłymi do osi układu (X, Y, Z). Wektory naprężeń przyporządkowane
tym płaszczyznom cięcia oznaczymy, odpowiednio, przez
z
y
x
p
p
p
,
,
(rys. 4.3).
Rys. 4.3
Każdy z tych wektorów naprężeń możemy rozłożyć na trzy składowe równoległe do osi
układu. Jak łatwo zauważyć, zawsze jedna z tych składowych będzie normalna do
płaszczyzny przecięcia a dwie pozostałe będą do niej styczne. Zgodnie z rys. 4.3 możemy
zapisać:
xz
xy
x
x
p
τ
τ
σ
+
+
=
yz
y
yx
y
p
τ
σ
τ
+
+
=
(4.2)
z
zy
zx
z
p
σ
τ
τ
+
+
=
Y
X
Z
x
v
C
x
p
x
σ
xy
τ
xy
τ
C
y
v
yz
τ
y
p
yx
τ
y
σ
z
σ
Y
C
z
v
z
p
zx
τ
zy
τ

Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
30
Współrzędne wektorów naprężeń
z
y
x
p
p
p
,
,
oznaczać będziemy podobnie jak ich składowe,
opuszczając jedynie nadkreślenie i zapiszemy je w formie macierzy
σ
T
nazywanej macierzą
naprężeń:
=
z
zy
zx
yz
y
yx
xz
xy
x
T
σ
τ
τ
τ
σ
τ
τ
τ
σ
σ
.
(4.3)
Możemy więc powiedzieć, że:
macierz naprężeń w punkcie to uporządkowany zbiór współrzędnych trzech wektorów
naprężeń na płaszczyznach prostopadłych do osi układu współrzędnych.
Uporządkowany w ten sposób, że wiersze przedstawiają kolejne współrzędne, kolejnych
wektorów naprężeń. W wyniku takiego uporządkowania na przekątnej macierzy znajdują się
naprężenia normalne a poza przekątną naprężenia styczne. Jasna jest też wymowa indeksów
przy naprężeniach. Indeks przy naprężeniu normalnym pokazuje płaszczyznę na której ono
występuje i do której jest ono prostopadłe, czyli oś układu do której to naprężenie jest
równoległe. Indeksy przy naprężeniu stycznym pokazują: pierwszy płaszczyznę na której ono
występuje, a drugi oś układu do której to naprężenie jest równoległe.
Zatem np.
z
σ to naprężenie normalne na płaszczyźnie prostopadłej do osi Z, a
yx
τ
to
naprężenie styczne na płaszczyźnie prostopadłej do osi Y i równoległe do osi X.
Powszechnie jest stosowana i co ważniejsze jest wygodna szczególna umowa znakowania
elementów macierzy naprężeń (czyli współrzędnych wektorów naprężeń na płaszczyznach
prostopadłych do osi układu).
Za dodatnie, w macierzy naprężeń, uważamy współrzędne takich składowych, które mają:
• zwrot zgodny ze zwrotem osi do której są równoległe
• i zwrot normalnej zewnętrznej płaszczyzny na której one występują także zgodny ze
zwrotem osi układu do której ta normalna jest równoległa
lub jeśli zarówno składowa jak i normalna mają zwroty przeciwne do odpowiednich osi, do
których są równoległe.
Jest tzw. reguła podwójnej zgodności. W każdym innym przypadku współrzędna jest ujemna.
Zgodnie z przyjętą umową naprężenie normalne jest dodatnie jeśli jest rozciągające, a ujemne
jeśli jest ściskające.
Należy powiedzieć, że macierz naprężeń w punkcie to zbiór liczb. Gdybyśmy rozszerzyli to
pojęcie na całą objętość bryły to miejsce liczb zajmą funkcje współrzędnych wektora
wodzącego dowolnego punktu obszaru bryły.
Jak się wkrótce przekonamy macierz naprężeń w punkcie będzie podstawą określenia w nim
stanu naprężenia.
Dla lepszego zrozumienia oraz utrwalenia przyjętych definicji i umów znakowania
elementów macierzy naprężeń przedstawimy jej graficzną interpretację.
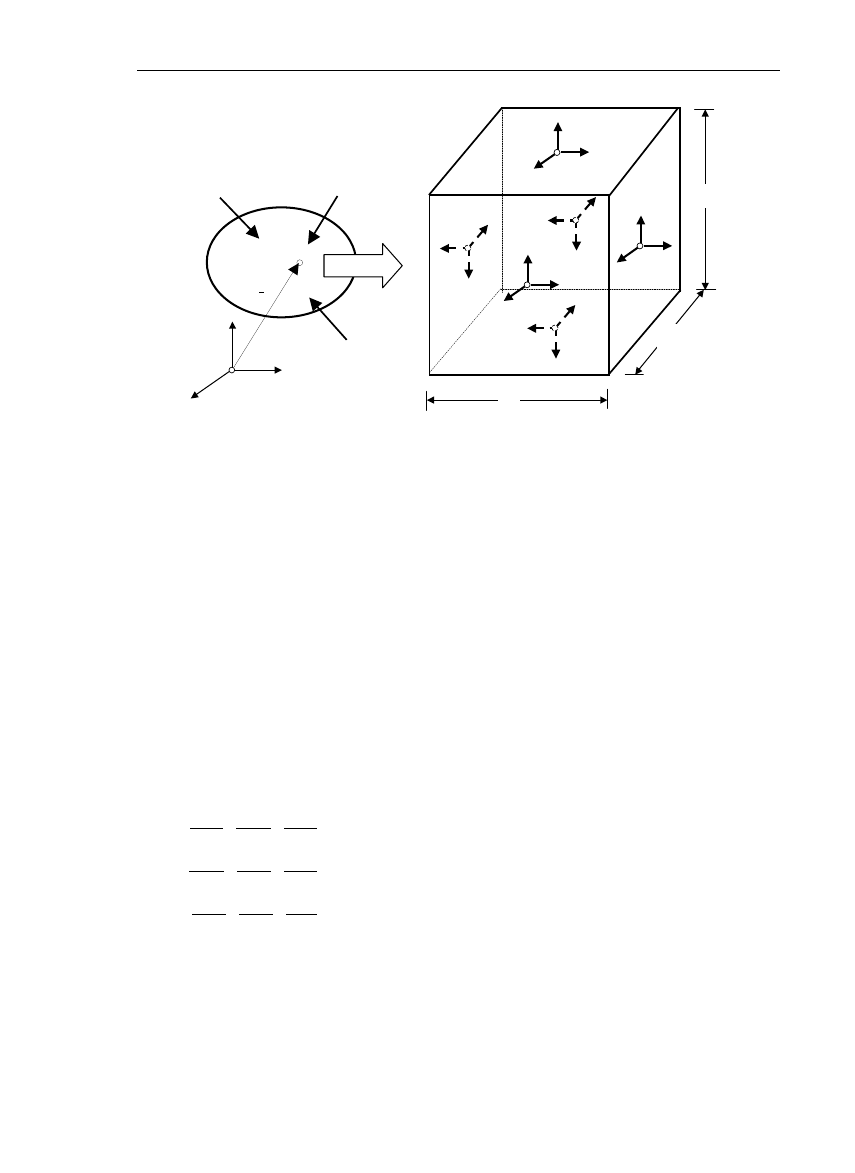
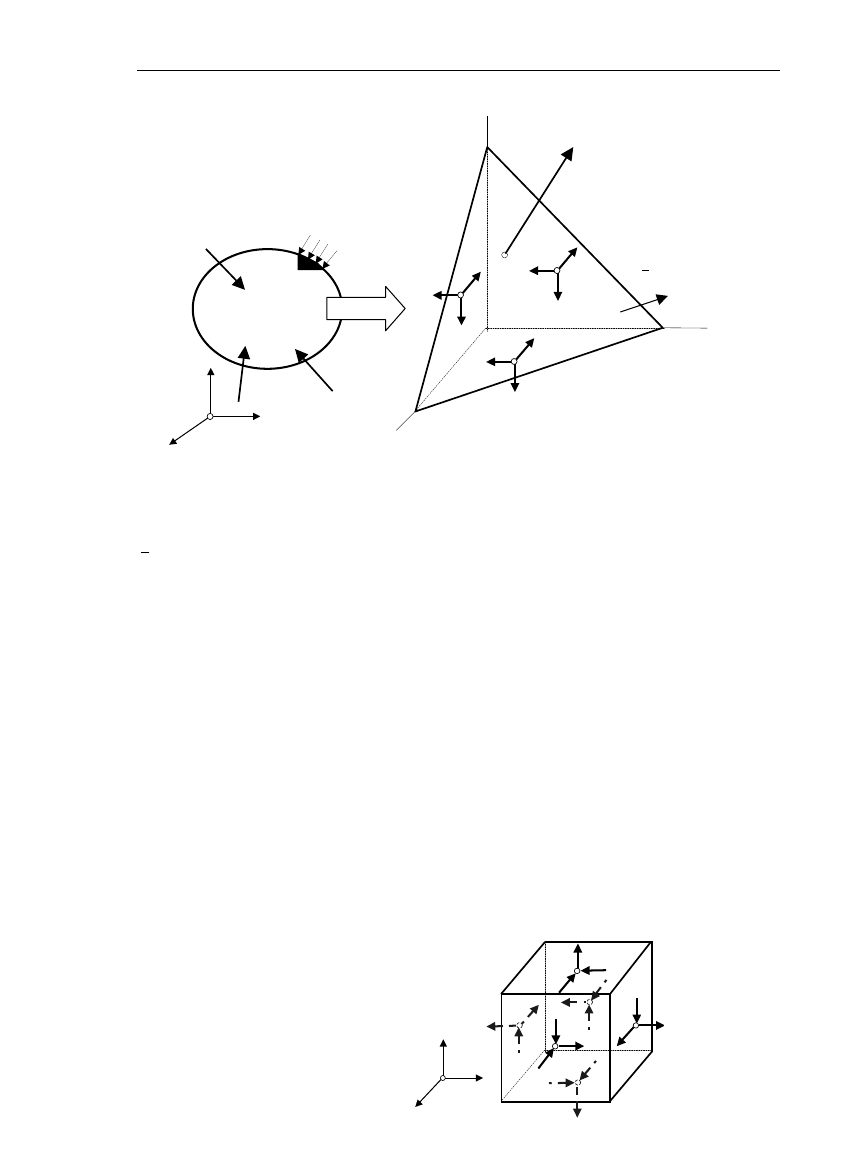
Weźmy obciążone, pozostające w równowadze ciało i wybierzmy w nim dowolny punkt
materialny C (rys. 4.4).
Będziemy go modelować za pomocą dowolnie małego sześcianu, którego ścianki są
równoległe do płaszczyzn układu odniesienia.
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
31
Rys. 4.4
Ten punkt materialny możemy wyjąc z rozważanej bryły pod warunkiem, że przyłożymy do
niego wszystkie siły z jakimi pozostałe punkty ciała działają na niego. Wielkości tych sił
otrzymamy mnożąc elementy macierzy naprężeń pokazane na rys. 4.4 przez powierzchnie
odpowiednich ścianek sześcianu. Tak więc pokazany na rys. 4.4 sześcian pokazuje graficzny
obraz macierzy naprężeń (wszystkie narysowane na nim składowe macierzy naprężeń są
dodatnie) i równocześnie siły z jakimi wszystkie punkty bryły działają na punkt C.
Z założenia o równowadze rozważnej bryły wynika równowaga sił wewnętrznych
działających na punkt C.
Rozpisując warunki równowagi tych sił otrzymamy zależności:
• z warunków zerowania się momentów sił względem osi układu
=
=
=
zy
yz
zx
xz
yx
xy
τ
τ
τ
τ
τ
τ
(4.4)
• z warunków zerowania się rzutów sił na osie układu
=
+
∂
∂
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
+
∂
∂
0
0
0
z
z
zy
zx
y
yz
y
yx
x
xz
xy
x
P
z
y
x
P
z
y
x
P
z
y
x
σ
τ
τ
τ
σ
τ
τ
τ
σ
(4.5)
gdzie:
z
y
x
P
,
P
,
P
współrzędne siły masowej.
Równania (4.4) dowodzą, że macierz naprężeń jest symetryczna, a równania różniczkowe
(4.5) stanowią warunki konieczne które winny spełniać funkcje trzech zmiennych aby móc
być elementami macierzy naprężeń. Równania różniczkowe (4.5) noszą nazwę równań
równowagi wewnętrznej lub równań Naviera i muszą być stowarzyszone ze statycznymi
yz
τ
xz
τ
x
σ
Y
xy
ττττ
y
σ
yx
τ
Y
x
σ
Y
xy
τ
xz
τ
Y
y
σ
yx
τ
Y
z
σ
Y
zy
τ
zx
τ
zx
τ
Y
z
σ
zy
τ
dy
dx
dz
C
Y
X
Z
r
yz
τ
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
32
warunkami brzegowymi wiążącymi obciążenie brzegu bryły z elementami macierzy
naprężeń.
4.4. Współrzędne wektora naprężenia na dowolnej płaszczyźnie. Tensor naprężeń
Wytnijmy z wnętrza bryły, będącej w równowadze, nieskończenie mały czworościan wokół
dowolnego punktu C, którego trzy ściany będą równoległe do płaszczyzn układu odniesienia
a czwarta będzie równoległa do dowolnej płaszczyzny o wersorze normalnym
(
)
n
m
l
v
,
,
.
Zakładając, że znamy macierz naprężeń w tym punkcie będziemy chcieli wyznaczyć wektor
naprężenia
(
)
vz
vy
vx
v
p
p
p
p
,
,
na tej czwartej dowolnej płaszczyźnie (rys. 4.5).
Rys. 4.5
Oznaczmy pola ścianek czworościanu odpowiednio prostopadłych do osi układu odniesienia
przez:
,
,
,
z
y
x
A
A
A
∆
∆
∆
a pole czwartej przez
.
A
∆
Ponieważ współrzędne wersora
normalnego
czwartej
dowolnie
nachylonej
ś
cianki
czworościanu
(
)
(
)
(
)
Z
v
n
Y
v
m
X
v
l
,
cos
,
,
cos
,
,
cos
=
=
=
to między polami powierzchni ścianek czworościanu
zachodzą zależności:
n
A
A
m
A
A
l
A
A
z
y
x
∆
∆
∆
∆
∆
∆
=
=
=
,
,
.
Tilda „
∼” nad naprężeniami na rys. 4.5 oznacza średnią wartość naprężeń na powierzchni
ś
cianki czworościanu.
Warunki równowagi sił działających na wycięty czworościan dają równania:
n
m
l
p
A
A
A
A
p
X
zx
yx
x
vx
z
zx
y
yx
x
x
vx
τ
τ
σ
∆
τ
∆
τ
∆
σ
∆
~
~
~
~
~
~
~
~
0
+
+
=
→
+
+
=
→
=
∑
n
m
l
p
A
A
A
A
p
Y
zy
y
xy
vy
z
zy
y
y
x
xy
vy
τ
σ
τ
∆
τ
∆
σ
∆
τ
∆
~
~
~
~
~
~
~
~
0
+
+
=
→
+
+
=
→
=
∑
n
m
l
p
A
A
A
A
p
Z
z
yx
xz
vz
z
z
y
yz
x
xz
vz
σ
τ
τ
∆
σ
∆
τ
∆
τ
∆
~
~
~
~
~
~
~
~
0
+
+
=
→
+
+
=
→
=
∑
Po wykonaniu przejścia granicznego z bokami czworościanu do zera z zachowaniem
nachylenia czwartej ścianki w powyższych równaniach w miejsce średnich wartości
współrzędnych naprężeń otrzymujemy wartości w rozważanym punkcie i po wykorzystaniu
symetrii macierzy naprężeń otrzymujemy zależności wiążące jej współrzędne ze
współrzędnymi wektora naprężenia:
x
σ
~
Y
xy
τ
~
xz
τ
~
Y
yz
τ
~
y
σ
~
yx
τ
~
Y
z
σ
~
Y
zy
τ
~
zx
τ
~
(
)
vz
vy
vx
v
p
p
p
p
~
,
~
,
~
~
(
)
n
m
l
v
,
,
C
Y
X
Z
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
33
n
m
l
p
xz
xy
x
vx
τ
τ
σ
+
+
=
n
m
l
p
yz
y
yx
vy
τ
σ
τ
+
+
=
(4.6)
n
m
l
p
z
zy
zx
vz
σ
τ
τ
+
+
=
Równania (4.6) dowodzą, że:
macierz naprężeń w danym punkcie określa w nim stan naprężenia gdyż znajomość jej
elementów pozwala na wyznaczenie współrzędnych wektora naprężenia na dowolnej
płaszczyźnie przechodzącej przez ten punkt.
Równania (4.6) możemy zapisać jeszcze w innej zwartej macierzowej formie:
v
T
p
v
σ
=
→
=
n
m
l
p
p
p
z
zy
zx
yz
y
yx
xz
xy
x
vz
vy
vx
σ
τ
τ
τ
σ
τ
τ
τ
σ
(4.7)
Powyższe równania pokazują, że w wyniku mnożenia macierzy naprężeń
σ
T
przez wektor
v
otrzymujemy wektor naprężenia
v
p
.
Możemy też to sformułować bardziej
formalnie, że macierz naprężeń w
punkcie
jest
wielkością,
która
dowolnemu kierunkowi
v
- normalna
do płaszczyzny przecięcia bryły w tym
punkcie, przyporządkowuje wektor
v
p
- wektor naprężenia na tej
płaszczyźnie (rys. 4.6).
To wyżej powiedziane stanowi dowód na to, że macierz naprężeń jest tensorem drugiego
rzędu co oznacza, że jej elementy transformują się przy zmianie układu odniesienia w pewien
ś
ciśle określony sposób zwany prawem transformacji tensora.
Mając współrzędne wektora naprężenia, na
dowolnej
płaszczyźnie,
(
)
vz
vy
vx
v
p
p
p
p
,
,
określone
w
wyjściowym
układzie
współrzędnych, łatwo możemy wyznaczyć
jego współrzędne odniesione do układu
związanego z tą płaszczyzną, wyznaczonego
przez
ortonormalną
trójkę
wersorów
(
)
n
m
l
v
,
,
,
(
)
1
1
1
n
,
m
,
l
ξ
,
(
)
2
2
2
n
,
m
,
l
η
.
Pierwszy z tych wersorów jest normalny do
płaszczyzny a dwa pozostałe są do niej
styczne (rys.4.7).
v
p
Y
X
Z
v
r
Rys. 4.6
Y
X
Z
v
p
v
σ
ξ
η
v
η
τ
v
ξ
τ
v
Rys.4.7
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
34
Zaczniemy od rozłożenia wektora
v
p
na trzy składowe (rys.4.7)
η
ξ
τ
τ
σ
v
v
v
v
p
+
+
=
,
(4.8)
z których
v
σ to naprężenie normalne do płaszczyzny a dwie pozostałe
ξ
τ
v
i
η
τ
v
są do niej
styczne i równoległe do wersorów
ξ i η , a ich suma przedstawia całkowite naprężenie
styczne:
η
ξ
τ
τ
τ
v
v
v
+
=
.
Współrzędne wektora
v
p
w układzie odniesienia wyznaczonym przez trójkę wersorów
(
v
,
ξ ,η ), oznaczymy tak jak jego składowe opuszczając jedynie nadkreślenie. Otrzymamy je
mnożąc skalarnie
v
p
przez odpowiednie wersory (bo to rzuty wektora na oś) i tak:
v
v
p
v
=
σ
,
v
v
p
ξ
τ
ξ
=
,
η
η
τ
v
v
p
v
=
.
(4.9)
Uwzględniając w ( 4.9 ) związki ( 4.7) otrzymujemy zależności:
(
)
=
n
m
l
n
,
m
,
l
z
zy
zx
yz
y
yx
xz
xy
x
v
σ
τ
τ
τ
σ
τ
τ
τ
σ
σ
,
(4.10)
(
)
=
n
m
l
n
,
m
,
l
z
zy
zx
yz
y
yx
xz
xy
x
v
σ
τ
τ
τ
σ
τ
τ
τ
σ
τ
ξ
1
1
1
,
(4.11)
(
)
=
n
m
l
n
,
m
,
l
z
zy
zx
yz
y
yx
xz
xy
x
v
σ
τ
τ
τ
σ
τ
τ
τ
σ
τ
η
2
2
2
’
(4.12)
które są konsekwencją tego, że macierz naprężeń jest tensorem.
Macierzowy zapis tych powyższych zależności jest bardzo wygodny w obliczeniach
zwłaszcza gdy korzystamy z ogólnie dostępnych profesjonalnych kalkulacyjnych programów
komputerowych np. typu Excel czy Madcad.
4.5. Statyczne warunki brzegowe
Z rozważanej na rys. 4.5 bryły w równowadze wytnijmy przy jej brzegu elementarny
czworościan którego trzy ściany będą równoległe do płaszczyzn układu odniesienia a czwarta
będzie zawierała element powierzchni zewnętrznej
S
∆
o wersorze normalnym zewnętrznym
(
)
n
m
l
v
,
,
.
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
35
Rys. 4.8
Analizując, analogicznie jak w punkcie poprzednim, warunki równowagi tak wyciętego
czworościanu
otrzymujemy
zależności
wiążące
współrzędne
obciążenia
bryły
(
)
vz
vy
vx
v
q
q
q
q
,
,
w rozważanym punkcie brzegowym ze współrzędnymi macierzy naprężeń w
tym punkcie:
n
m
l
q
xz
xy
x
vx
τ
τ
σ
+
+
=
n
m
l
q
yz
y
yx
vy
τ
σ
τ
+
+
=
(4.13)
n
m
l
q
z
zy
zx
vz
σ
τ
τ
+
+
=
Równania (4.13) noszą nazwę statycznych warunków brzegowych i jak już wspomniano są
niezbędne przy rozwiązywaniu równań różniczkowych Naviera.
Statyczne warunki brzegowe (4.13) choć bardzo podobne do równań (4.6), merytorycznie
różnią się zasadniczo. Przede wszystkim lewe strony (4.13) są znane (bo to zadane obciążenie
brzegu bryły) w przeciwieństwie do równań (4.6) w których lewe strony to poszukiwane
współrzędne naprężenia na zadanej dowolnej płaszczyźnie.
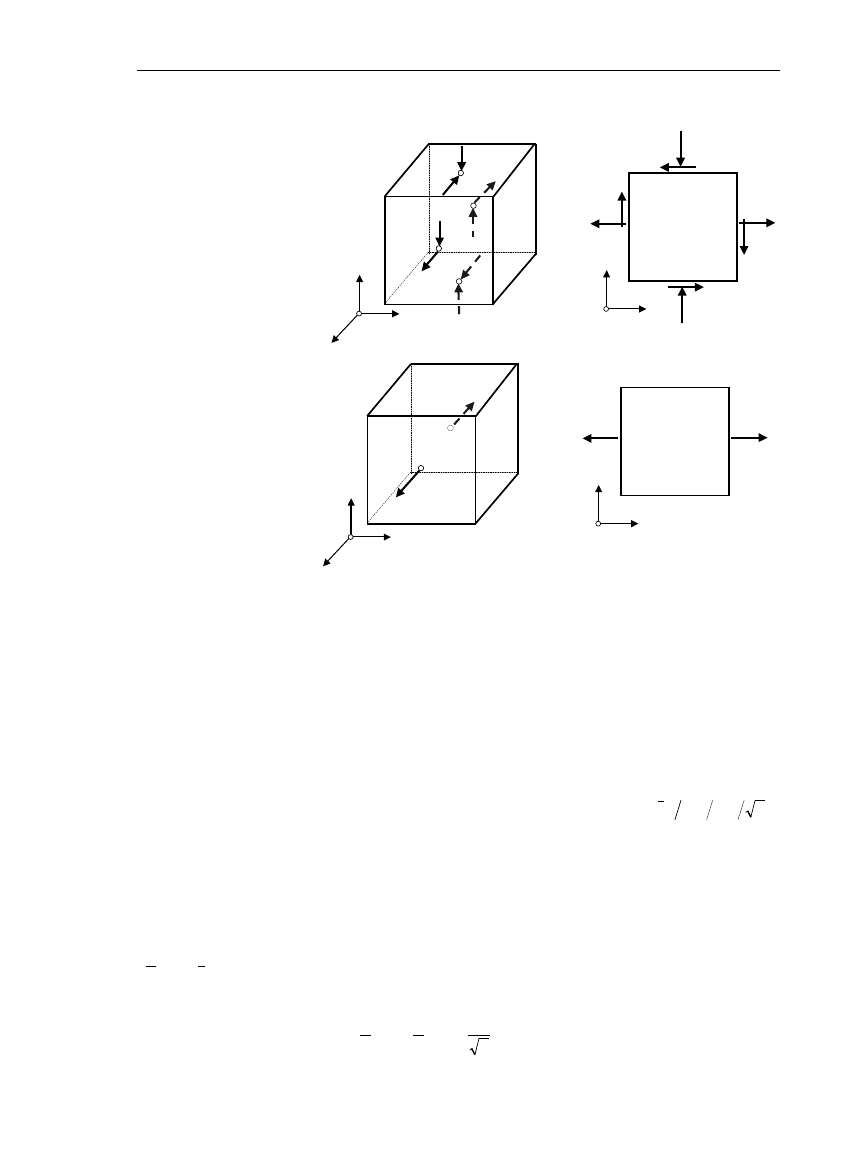
4.6. Przykłady
Przykład 4.6.1. Narysować graficzne obrazy danych macierzy naprężeń i określić jaki stan
naprężenia reprezentują.
Rozwi
ą
zanie
−
−
−
−
−
=
4
2
3
2
6
5
3
5
1
σ
T
MPa
Y
X
Z
x
σ
~
Y
xy
τ
~
xz
τ
~
Y
yz
τ
~
y
σ
~
yx
τ
~
Y
z
σ
~
Y
zy
τ
~
zx
τ
~
(
)
vz
vy
vx
v
q
q
q
q
~
,
~
,
~
~
(
)
n
m
l
v
,
,
5
5
2
1
3
6
2
3
4
Z
X
Y
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
36
−
−
−
=
4
0
2
0
0
0
2
0
3
σ
T
MPa
=
0
0
0
0
0
0
0
0
5
σ
T
MPa
Równania (4.6) rozstrzygają o tym, że pierwsza macierz reprezentuje przestrzenny stan
naprężenia, druga płaski stan, którego płaszczyzną naprężenia jest płaszczyzna (X, Z), a stan
naprężenia określony trzecią macierzą jest jednoosiowy.
Przykład 4.6.2. W punkcie w którym panuje stan naprężenia określony macierzą naprężenia
−
−
−
=
100
20
60
20
200
50
60
50
100
σ
T
MPa
wyznaczyć:
a/ współrzędne wektora naprężenia na płaszczyźnie o wersorze normalnym
(
)
2
1
,
2
1
,
2
1
v
,
b/ długość wektora naprężenia normalnego
v
σ i stycznego
v
τ
na tej płaszczyźnie,
c/ współrzędne wektora naprężenia normalnego stycznego na tej płaszczyźnie.
Rozwi
ą
zanie
Współrzędne wektora naprężenia wyznaczamy z zależności:
v
T
p
v
σ
=
→
=
n
m
l
p
p
p
z
zy
zx
yz
y
yx
xz
xy
x
vz
vy
vx
σ
τ
τ
τ
σ
τ
τ
τ
σ
426
17
2
1
60
2
1
50
2
1
100
.
*
*
*
n
m
l
p
xz
xy
x
vx
=
+
+
−
=
+
+
=
τ
τ
σ
MPa
5
5
Z
X
Z
X
Y
5
3
3
2
Z
X
2
2
4
4
2
3
2
4
2
Z
X
Y
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
37
858
.
110
2
1
*
20
2
1
*
200
2
1
*
50
=
−
+
=
+
+
=
n
m
l
p
yz
y
yx
vy
τ
σ
τ
MPa
711
90
2
1
100
2
1
20
2
1
60
.
*
*
*
n
m
l
p
z
yz
zx
vz
=
+
−
=
+
+
=
σ
τ
τ
MPa
Naprężenie normalne
284
128
2
1
711
90
2
1
858
110
2
1
426
17
.
*
.
*
.
*
.
n
p
m
p
l
p
v
p
vz
vy
vx
v
v
=
+
+
=
+
+
=
=
σ
MPa
Długość wektora naprężenia stycznego
2
v
2
v
v
2
v
2
v
2
v
p
p
σ
τ
τ
σ
−
=
→
+
=
647
20821
2
.
p
p
p
p
p
p
p
vz
vz
vy
vy
vx
vx
v
=
+
+
=
(MPa)
2
,
785
16456
284
128
2
2
.
.
v
=
=
σ
(MPa)
2
067
66
785
16456
647
20821
2
2
.
.
.
p
v
v
v
=
−
=
−
=
σ
τ
MPa
Ponieważ
v
v
v
σ
σ
=
, to współrzędne wektora naprężenia normalnego
(
)
vz
vy
vx
v
σ
σ
σ
σ
,
,
są
równe:
142
64
2
284
128
.
.
l
v
vx
=
=
=
σ
σ
MPa,
142
64
2
284
128
.
.
m
v
vy
=
=
=
σ
σ
MPa,
710
90
2
284
128
.
.
n
v
vz
=
=
=
σ
σ
MPa.
Z zależności
v
v
v
p
τ
σ
+
=
, wynika, że współrzędne wektora naprężenia stycznego
(
)
vz
vy
vx
v
τ
τ
τ
τ
,
,
mają wartości:
323
.
57
536
.
53
787
.
3
−
=
−
−
=
−
=
vx
vx
vx
p
σ
τ
MPa
322
.
57
536
.
53
858
.
110
=
−
=
−
=
vy
vy
vy
p
σ
τ
MPa,
001
.
0
710
.
75
711
.
75
=
−
=
−
=
vz
vz
vz
p
σ
τ
MPa.
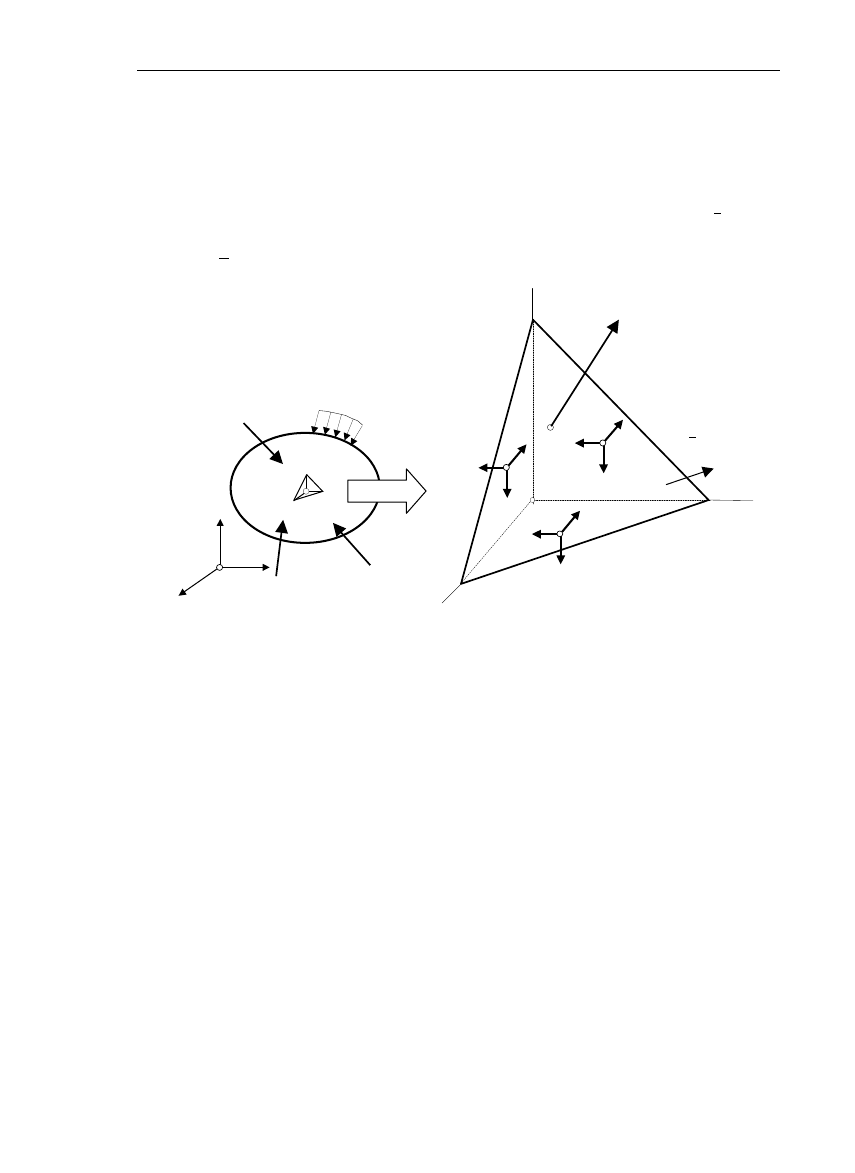
Przykład 4.6.3. Brzeg tarczy kołowej o promieniu R obciążony jest na całym swym
obwodzie obciążeniem normalnym o stałej gęstości q. Napisać statyczne warunki brzegowe
dla tej tarczy.
Równanie
brzegu
tarczy:
(
)
0
0
,
2
2
2
=
−
+
→
=
R
y
x
y
x
f
Rozwi
ą
zanie
Współrzędne wersora normalnego do brzegu:
(
)
(
)
( )
( )
R
x
y
x
x
l
y
f
x
f
x
f
l
=
+
=
→
∂
∂
+
∂
∂
∂
∂
=
2
2
2
2
2
2
2
q
(
)
m
l
v
,
Y
X
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
38
(
)
(
)
( )
( )
R
y
y
x
y
m
y
f
x
f
y
f
m
=
+
=
→
∂
∂
+
∂
∂
∂
∂
=
2
2
2
2
2
2
2
Statyczne warunki brzegowe
v
T
q
v
σ
=
m
l
m
q
m
l
q
m
l
l
q
m
l
q
y
yx
y
yx
vy
xy
x
xy
x
vx
σ
τ
σ
τ
τ
σ
τ
σ
+
=
−
→
+
=
+
=
−
→
+
=
i ostatecznie
y
x
y
q
y
x
x
q
y
yx
xy
x
σ
τ
τ
σ
+
=
−
+
=
−
gdzie
xy
y
x
,
,
τ
σ
σ
są elementami tensora naprężeń na brzegu tarczy, są więc funkcjami jednej
zmiennej.
Przykład 4.6.4. Wyznaczyć obciążenie pokazanej tarczy spełniające warunki równowagi i
statyczne warunki brzegowe, jeśli stan naprężenia w jej punktach określają zależności
12
,
6
,
12
−
=
=
=
xy
y
x
x
y
x
τ
σ
σ
−
−
=
x
y
x
T
6
,
12
12
,
12
σ
Rozwi
ą
zanie
Obciążenie tarczy stanowią siły masowe i siły przyłożone na jej brzegach.
Siły masowe wyznaczymy z równań Naviera (są to równania równowagi wewnętrznej ale i
warunki konieczne na to aby podane funkcje naprężeń były współrzędnymi tensora naprężeń).
=
−
=
→
=
=
+
→
=
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
0
12
0
0
12
0
0
y
x
y
x
y
y
yx
x
xy
x
P
y
P
P
P
y
P
y
x
P
y
x
σ
τ
τ
σ
.
Obciążenia brzegów tarczy wyznaczymy ze statycznych warunków brzegowych.
+
=
+
=
m
l
q
m
l
q
y
yx
vy
xy
x
vx
σ
τ
τ
σ
0
2
1
Y
X
3 m
4 m
Adam Bodnar: Wytrzymałość Materiałów. Teoria stanu naprężenia.
39
Brzeg 0-1;
Równanie brzegu : y
= 0
1
,
0
−
=
=
m
l
x
x
q
q
vy
vx
6
)
1
(
*
6
12
)
1
(
*
12
−
=
−
=
=
−
−
=
Brzeg 0-2;
Równanie brzegu : x
= 0
0
,
1
=
−
=
m
l
12
)
1
(
*
12
0
)
1
(
*
12
=
−
−
=
=
−
=
vy
vx
q
y
x
q
x
q
vx
q
vy
0
-9.6 -7.2
1
6.6 -2.4
2
12.0 2.4
3
6.6
7.2
Brzeg 1-2;
Równanie brzegu :
3
75
.
0
+
−
=
x
y
8
0
6
0
.
)
Y
,
v
cos(
m
,
.
)
X
,
v
cos(
l
=
=
=
=
2
.
7
8
.
4
8
.
0
*
6
6
.
0
*
12
6
.
9
6
.
21
4
.
5
6
.
9
2
.
7
8
.
0
*
12
6
.
0
*
12
2
−
=
+
−
=
−
+
−
=
=
−
=
−
=
x
x
q
x
x
y
x
y
x
q
vy
vx
4
-9.6 12.0
Sprawdzenie równowagi obliczonych sił działających na tarczę.
( )
(
)
(
)
(
)
0
12
6
.
9
6
.
21
4
.
5
12
0
;
0
2
1
2
4
0
=
−
+
−
+
−
+
=
+
=
∫∫
∫
∫
∫∫
∑ ∫
∑
−
dy
dx
y
ds
x
x
x
d
dA
P
ds
q
X
A
x
K
vx
( )
(
)
(
)
0
2
.
7
8
.
4
12
6
0
;
0
2
1
3
0
4
0
=
−
+
+
−
=
+
=
∫
∫
∫
∫∫
∑ ∫
∑
−
ds
x
y
d
x
d
x
dA
P
ds
q
Y
A
y
K
vy
(
)
( )
(
)
0
;
0
=
−
+
−
=
∫∫
∑ ∫
∑
A
x
y
K
vx
vy
O
dA
P
y
P
x
ds
q
y
q
x
M
6.6
6.6
12.0
9.6
12.0
9.6
q
vx
q
vy
7.2
12.0
24.0
12.0
Wyszukiwarka
Podobne podstrony:
07 Z Teoria stanu naprężenia i odkształcenia
06 Z Teoria stanu naprężenia i odkształcenia
07 Z Teoria stanu naprężenia i odkształcenia
04 Elementy plaskiego stanu naprezen i odksztalcen
04 TEORIA (MODEL) BOHRA ATOMU Nieznany
Analiza stanu naprężenia metodą elastooptyczną, Wytrzymałość materiałów(1)
3 podstawy teorii stanu napreze Nieznany
2 Analiza stanu naprezenia i odksztalcenia w punkcie
Analiza stanu naprężenia i odkształcenia
8 Analiza jedno i dwuosiowego stanu naprężeń, koło Mohra
05 Analiza plaskiego stanu naprezenia
3 laborka -analiza stanu naprężenia Elastooptyka, Wytrzymałość materiałów(1)
04 Teoria prawa - JĘZYK PRAWNY, PRAWO UŁ, IV rok, Teoria i filozofia prawa
ANALIZA STANU NAPRĘŻENIA I ODKSZTAŁCENIA
10 Analiza stanu naprężenia pojęcia podstawowe
więcej podobnych podstron