
1
Ć
wiczenie 11
BADANIE TENSOMETRYCZNE NAPRĘŻEŃ I ODKSZTAŁCEŃ
W PŁYCIE KOŁOWEJ
Opracował: dr inż. Henryk Potulski
1. Wstęp
Intensywny rozwój metod obliczeniowych elementów konstrukcji pociąga za sobą
konieczność weryfikacji doświadczalnej. Z pośród wielu metod pomiaru naprężeń i
odkształceń elementów maszyn najbardziej rozpowszechniona jest metoda tensometrii
oporowej. Umożliwia ona pomiar małych odkształceń, współczynników rozszerzalności
termicznej, zjawisk pełzania, histerezy, granicy proporcjonalności, sprężystości i
plastyczności. Możliwość pomiaru małych odkształceń pozwala na określenie licznych
wielkości nierozłącznie związanych jak: momentów, sił naprężeń ciśnień itp.
2. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie studentów z podstawami tensometrii oporowej,
utrwalenie wiedzy z teorii płyt, oraz poznanie metody pomiaru naprężeń i odkształceń w
płytach.
3. Wprowadzenie
Tensometria zajmuje się pomiarem małych odkształceń w granicach proporcjonalności.
Znając stałe materiałowe można obliczyć pozostałe wielkości.
Odkształcenia mierzy się przy pomocy tensometrów na wybranym odcinku pomiarowym
(bazie). Mając pomierzone odkształcenia korzystamy z prawa fizycznego wiążącego ze sobą
odkształcenia i naprężenia − prawo Hooke’a i obliczamy naprężenia występujące na tym
odcinku pomiarowym. Metoda tensometryczna stosowana jest do pomiarów odkształceń i
naprężeń występujących na powierzchni badanej konstrukcji.
Są jednak próby stosowania tensometrii do pomiaru naprężeń wewnątrz konstrukcji przy
zastosowaniu tzw. sond tensometrycznych udane próby w tym zakresie można zanotować np.
do pomiaru naprężeń w betonie.
Trudności w stosowaniu tensometrii występują przy dużej koncentracji naprężeń,
ponieważ wartość odkształcenia mierzona na długości bazy pomiarowej jest wielkością
uśrednioną.
Postęp w tym zakresie idzie w kierunku konstruowaniu tensometrów o bazie pomiarowej
rzędu jednego, a nawet poniżej jednego milimetra. Daje to w większości przypadków
wystarczającą dokładność, jeśli idzie o wyznaczanie lokalnych wartości odkształceń.
Tensometry wyznaczają odkształcenia liniowe, które występują wzdłuż kierunku ich
bazy pomiarowej.
Zasada pomiaru metodą elektryczną tensometrii oporowej polega na zmianie oporności
elektrycznej przewodu na skutek zmiany jego długości pod wpływem obciążenia. Naprężenia
wywołane tym obciążeniem nie powinny przekraczać granicy, przy której przyrost jego
oporności elektrycznej przestaje być liniowy.
3.1. Budowa tensometrów
Istnieją dwa zasadnicze typy tensometrów elektrooporowych: o uzwojeniu wężykowym i
budowie kratkowej.
2
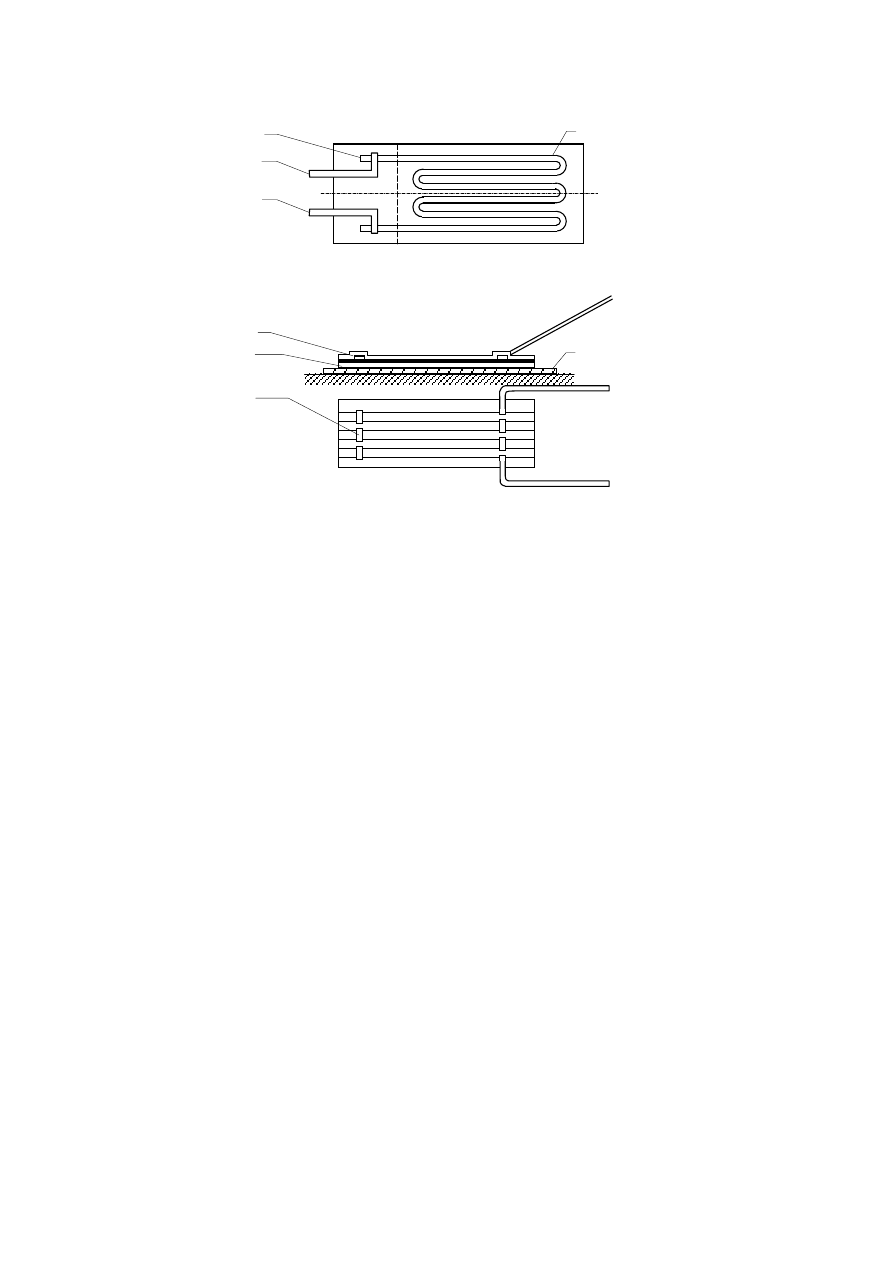
Rys. 1. Tensometr o uzwojeniu wężykowym
Rys. 2. Czujnik tensometryczny typu kratkowego
Pierwszy z nich pokazany na rys. 1 i składa się z szeregu równoległych zwojów (1)
ukształtowanych w formie wielokrotnego wężyka z drutu naklejonego specjalnym klejem (3)
na cienki papier, bibułkę lub taśmę celuloidową dopływ prądu elektrycznego odbywa się za
pośrednictwem dwóch grubszych przewodów (6) przylutowanych do końcówek drutu
oporowego (5). Drut z wierzchu przykrywa się naklejonym nań paskiem papieru (8) lub
filcem, w celu ochrony tensometru przed ewentualnym uszkodzeniem mechanicznym oraz
przed wpływem wilgoci i nagłych zmian temperatury. W ten sposób wykonany tensometr
nakleja się na odpowiednio przygotowaną powierzchnie przedmiotu badanego. Papierowa lub
celuloidowa podkładka (4) oraz cienka warstwa kleju spełnia jednocześnie rolę dielektryka w
stosunku do metalowej powierzchni przedmiotu.
Na rys. 2 przedstawia schemat budowy drugiego rodzaju tensometru typu kratkowego.
Tensometr składa się z szeregu równoległych drucików oporowych (1) połączonych
nalutowanymi znacznie grubszymi beleczkami poprzecznymi (2) poprzecinanymi w
odpowiedni sposób w celu stworzenia elektrycznego obwodu tensometru. Beleczki te
stanowią jednocześnie ograniczenie długości pomiarowej, czyli bazy tensometru l. Dopływ
prądu elektrycznego odbywa się za pośrednictwem dwóch grubszych przylutowanych
przewodów (6), przylutowanych do końcówek drutu oporowego (5).
Wyższość tensometrów o budowie kratkowej w porównaniu z tensometrami o budowie
wężykowej w głównej mierze przejawia się w tym, iż praktycznie są one niewrażliwe na
działanie odkształceń poprzecznych w stosunku do kierunku mierzonych odkształceń
podłużnych.
W obu przypadkach jako przewodnika używa się cienkiego drucika o średnicy 0,02 –
0,04 mm wykonanego ze specjalnego stopu np. (60%Cu, 40%Ni), chromonikieliny (75% Ni,
12% Fe, 11% Cr, 2% Mn), isoelastiku (55,5% Fe, 36% Ni, 8% Cr, 0,5 Mo) lub innych
materiałów.
Materiał nośny tworzący podkładkę dla drucika oporowego odgrywa bardzo ważną rolę
w jego pracy i dlatego musi odpowiadać następującym wymaganiom:
1. brak pełzania i histerezy,
2. nieczułość na wpływ wilgoci,
3. nieczułość na zmiany temperatury,
3
8
4
2
1
5
6
6

3
4. dobra przyczepność do kleju,
5. dostateczna wytrzymałość mechaniczna,
6. dobra izolacja
Do powierzchni używanych materiałów na podkładki stosuje się papier i folie z celulozy lub
innego materiału.
3.2. Technologia klejenia tensometrów
Wybrane miejsca powierzchni badanej konstrukcji przed umieszczeniem czujnika należy
starannie wygładzić, oczyścić i odtłuścić a następnie powlec cienką (0,03 – 0,05 mm)
warstwą specjalnego kleju. Klej ten musi spełniać określone warunki, powinien bowiem być
dobrym izolatorem, a ponadto powinien wiązać czujniki z powierzchnią tak, aby
odkształcenia drucika oporowego i odpowiednich włókien badanego elementu były
praktycznie jednakowe.
Naklejony czujnik należy następnie zabezpieczyć przed niekorzystnymi wpływami
otoczenia (głównie wilgocią) i przed uszkodzeniami mechanicznymi. Uzyskujemy to przed
powleczenie go dość grubą warstwą materiału izolującego np. żywicy itp. Najczęściej
zarówno do wyrobu czujników jak i przy ich naklejaniu są stosowane kleje wysychające. Do
najczęściej stosowanych klejów wysychających należą kleje acetonowo− celuloidowe. W
literaturze spotyka się wiele przepisów na tego rodzaju kleje. Najprostszym z nich jest klej o
następującej recepturze:
Aceton
– 100cm
3
Celuloid
– 6
÷ 8 g.
Naklejone czujniki przy pomocy tego kleju wymagają suszenia w temperaturze
pokojowej około 5−6 godzin.
Mogą być również stosowane kleje acetonowo−celuoidowe z różnymi domieszkami np.
Koloksylina o średniej gęstości (Nr 2)
15%
Aceton
21%
Octan amylowy
30%
Eter etylowy
30%
Jasna kalafonia
2%
W przypadku, gdy specjalnie zależy na szybkości przyklejenia, używamy szybko-
schnącego kleju celuloidowego
Eter etylowy
– 60 cm
3
Alkohol etylowy
– 40 cm
3
Celuloid
– 6 g
Kalafonia
– 2 g
Czas wiązania tego kleju wynosi 2−3 minuty. Czas jednak całkowitego stwardnienia
wynosi 6−8 godzin. Kleju tego używa się głównie przy produkcji czujników. Po wysuszeniu
czujnika i zabezpieczeniu przystępujemy do jego kontroli za pomocą omomierza lub mostka
tensometrycznego, oraz miernika izolacji. Najpierw mierzymy oporność czujnika, wady lub
uszkodzenia czujnika. Dlatego też w praktyce odrzucamy, albo uważamy za niepewne
czujniki, których oporność zmieniła się po naklejeniu więcej aniżeli o 2%. Oprócz zmian
oporności samego czujnika po przyklejeniu powinniśmy badać oporność izolacji, jaką tworzy
podkładka czujnika wraz z klejem. Za wystarczającą oporność izolacji uważa się oporność
rzędu 10
÷30 MΩ. Mniejsza oporność świadczy o wadliwym naklejeniu lub uszkodzeniu
czujnika, albo też przedostaniu się wilgoci. Pomiar oporności izolacji najlepiej jest wykonać
za pomocą specjalnego przyrządu. Końcową próbę czujnika możemy wykonać przyłączając
go w normalnym układzie do mostka tensometrycznego. Czujnik po zrównoważeniu mostka
lekko naciskamy palcem. Wskazówka mostka galwanometru ustawionego na najczulszy
zakres powinna się przy naciśnięciu wychylić i ponownie wrócić do położenia zerowego.
4
3.3. Fizykalne podstawy tensometrii oporowej
Wychodząc z prawa
s
l
R
⋅
=
ρ
(1)
Logarytmując dwustronnie wyrażenie
s
l
R
ln
ln
ln
ln
−
+
=
ρ
(2)
różniczkując dwustronnie
s
ds
l
dl
d
R
dR
−
+
=
ρ
ρ
(3)
Przechodząc do różnic skończonych
s
s
l
l
R
R
∆
−
∆
+
∆
=
∆
ρ
ρ
(4)
Dla jednoosiowego stanu obciążeń współczynnik Poissona
l
l
d
d
∆
∆
−
=
ν
(5)
Względny przyrost przekroju
l
l
d
d
s
s
∆
−
=
∆
=
∆
ν
2
2
(6)
Podstawiając do wzoru
ρ
ρ
ν
∆
+
+
∆
=
∆
)
2
1
(
l
l
R
R
(7)
Stosunek względnego przyrostu oporu do względnego przyrostu wydłużenia nazywamy
współczynnikiem czułości i oznaczamy przez K stąd
ε
ρ
ρ
ν
∆
+
+
=
∆
∆
=
2
1
l
l
R
R
K
(8)
ε
⋅
=
∆
k
R
R
(9)
Względny przyrost oporu jest proporcjonalny do względnego przyrostu wydłużenia.
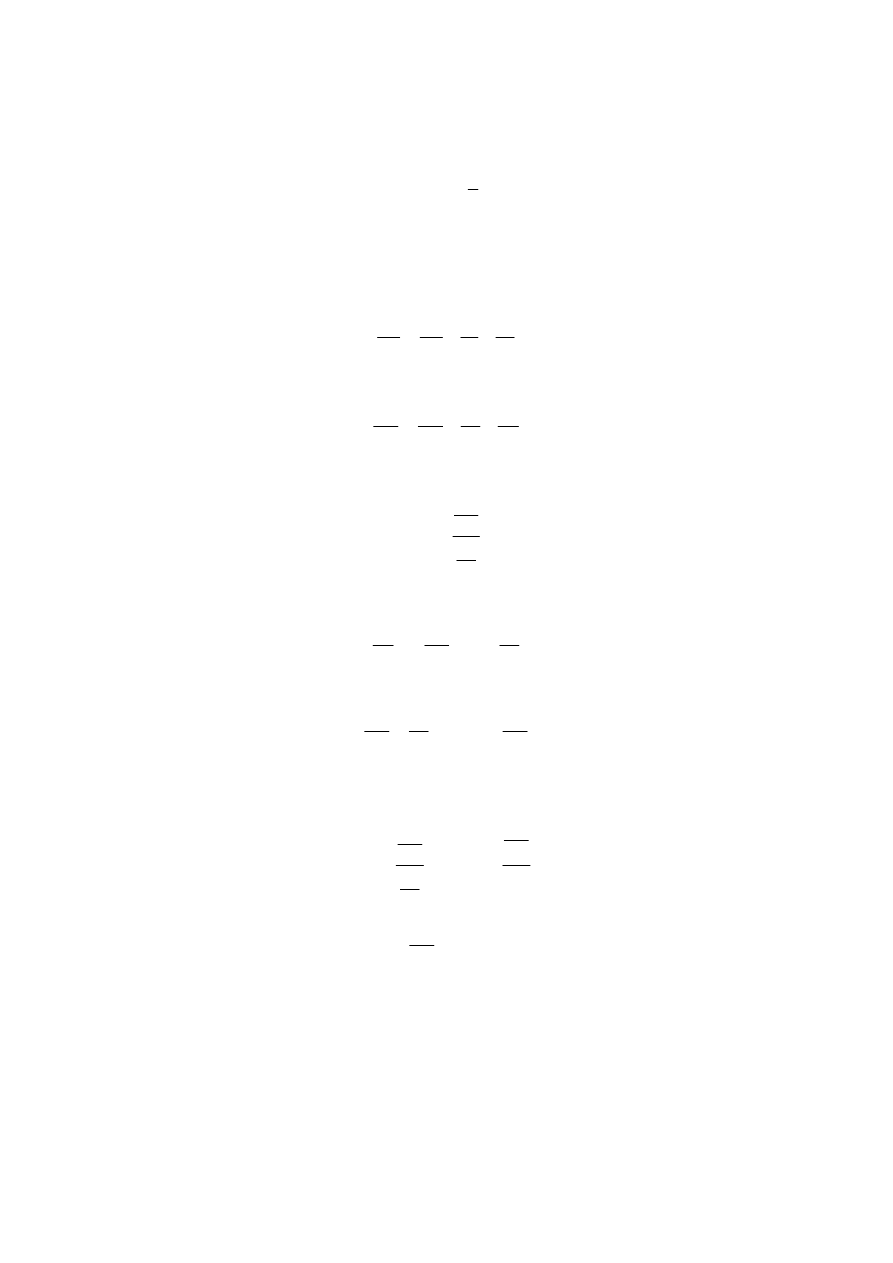
Do pomiaru bardzo małych zmian oporności tensometru stosuje się mostek Whedstone’a, w
którym
T
c
jest tensometrem czynnym i
T
k
tensometrem kompensacyjnym,
R
1
i
R
2
są oporami
stałymi,
P
jest potencjometrem ślizgowym,
G
– galwanometrem, zaś
Z
– źródłem prądu
stałego.
5
Rys. 3. Schemat układu pomiarowego
Zmiana temperatury otoczenia o ∆
t
powoduje zmianę oporności właściwej drucika
danego czujnika, zmianę odkształcenia materiału badanego, na który czujnik jest naklejony,
zmianę odkształcenia samego drucika i zmianę oporności przewodów łączących czujniki z
aparatem tensometrycznym. Ponadto nagrzanie czujnika prądem pomiarowym może
spowodować dalsze zmiany jego oporności.
Jeżeli przez α oznaczamy cieplny współczynnik rozszerzalności liniowej materiału
badanego a przez β podobny współczynnik materiału drucika oporowego to względny
przyrost oporu możemy wyrazić
t
k
R
R
∆
⋅
⋅
−
=
∆
)
(
0
1
β
α
(10)
przy czym R
0
– pocz
ą
tkowa oporno
ść
drucika. Samoogrzanie drucika oporowego o warto
ść
∆
t
wywoła równocze
ś
nie zmian
ę
jego oporno
ś
ci jednostkowej
t
R
R
∆
⋅
=
∆
γ
0
2
(11)
gdzie
γ
– współczynnik termicznych zmian oporno
ś
ci dla materiału drucika.
Zmiana temperatury drucika oporowego zale
ż
na od warto
ś
ci pr
ą
du nagrzewaj
ą
cego i
warunków chłodzenia ró
ż
ni si
ę
jednak od zmiany temperatury otoczenia. Oznaczamy ró
ż
nice
mi
ę
dzy zmian
ą
temperatury otoczenia
∆
t
d
. Uwzgl
ę
dniaj
ą
c te ró
ż
nice otrzymamy dalsz
ą
zmian
ę
jednostkowej oporno
ś
ci czujnika
d
k
t
R
R
∆
⋅
−
=
∆
)
(
0
3
β
γ
(12)
Sumuj
ą
c te wszystkie zmiany otrzymamy
d
t
k
t
k
R
R
∆
⋅
⋅
−
+
∆
+
⋅
−
=
∆
)
(
]
)
[(
0
β
γ
γ
β
α
(13)
Wpływ temperatury mo
ż
emy skompensowa
ć
w dwojaki sposób. Pierwszy sposób polega
na kompensacji w obr
ę
bie samego pojedynczego czujnika. Wymaga on wł
ą
czenia szeregowo
G
T
c
T
k
Z
P
R
1
R
2

6
z oporno
ś
ci
ą
czujnika oporno
ś
ci kompensacyjnej R
k
. Warto
ść
R
k
dobierzemy tak, aby zmiana
oporno
ś
ci wypadkowej była równa zeru, czyli
∆
R
+ R
k
= 0.
Podstawiaj
ą
c R
k
= R
k
γ
k
∆
t oraz
∆
R
z równania (13) otrzymamy
[
]
{
}
0
)
(
)
(
0
=
⋅
∆
⋅
−
+
∆
⋅
+
⋅
−
+
∆
⋅
⋅
R
t
k
t
k
t
R
d
k
k
β
γ
γ
β
α
γ
(14)
Aby zatem kompensacja była zupełna, niezale
ż
na ani od zmian temperatury otoczenia, ani od
zamian temperatury otoczenia, ani od zmian temperatury nagrzania drucika musz
ą
by
ć
spełnione dwa warunki
k
⋅
=
β
γ
(15)
k
R
R
k
k
⋅
⋅
=
⋅
−
α
γ
0
.
(16)
Współczynnik rozszerzalno
ś
ci materiału badanego jest najcz
ęś
ciej dodatni. Nale
ż
ałoby
wówczas zgodnie z równaniem (16) u
ż
y
ć
oporno
ś
ci kompensacyjnej R
k
o ujemnym
współczynniku termicznym
γ
k
. Najprostszym materiałem nadaj
ą
cym si
ę
do tego celu jest
mied
ź
o dodatnim współczynniku
γ
= 4
⋅10
−3
. Mo
ż
emy mimo to zastosowa
ć
drucik miedziany
jako oporno
ść
kompensacyjna wł
ą
czaj
ą
c go do przyległej gał
ę
zi mostka Wheatstone'a, gdzie
po wyrównaniu mostka dodatnie zmiany warto
ś
ci oporno
ś
ci działaj
ą
tak jak ujemne w gał
ę
zi
czujnika pomiarowego.
Drugi sposób kompensacji polega na zastosowaniu drugiego czujnika identycznego z
czujnikiem pomiarowym umieszczonym w układzie mostka Wheatstone'a w przyległej jego
gał
ę
zi. Ten drugi czujnik, zwany kompensacyjnym powinien pochodzi
ć
z tej samej serii, co
poprzedni, zwany czynnym. Oba czujniki powinny by
ć
naklejone na takim samym materiale,
w ten sam sposób naklejone oraz osuszone w identycznych warunkach. Jedyn
ą
ró
ż
nic
ą
mi
ę
dzy czujnikiem czynnym a kompensacyjnym jest to,
ż
e pierwszy poddajemy
odkształceniom pomiarowym, drugi za
ś
nie.
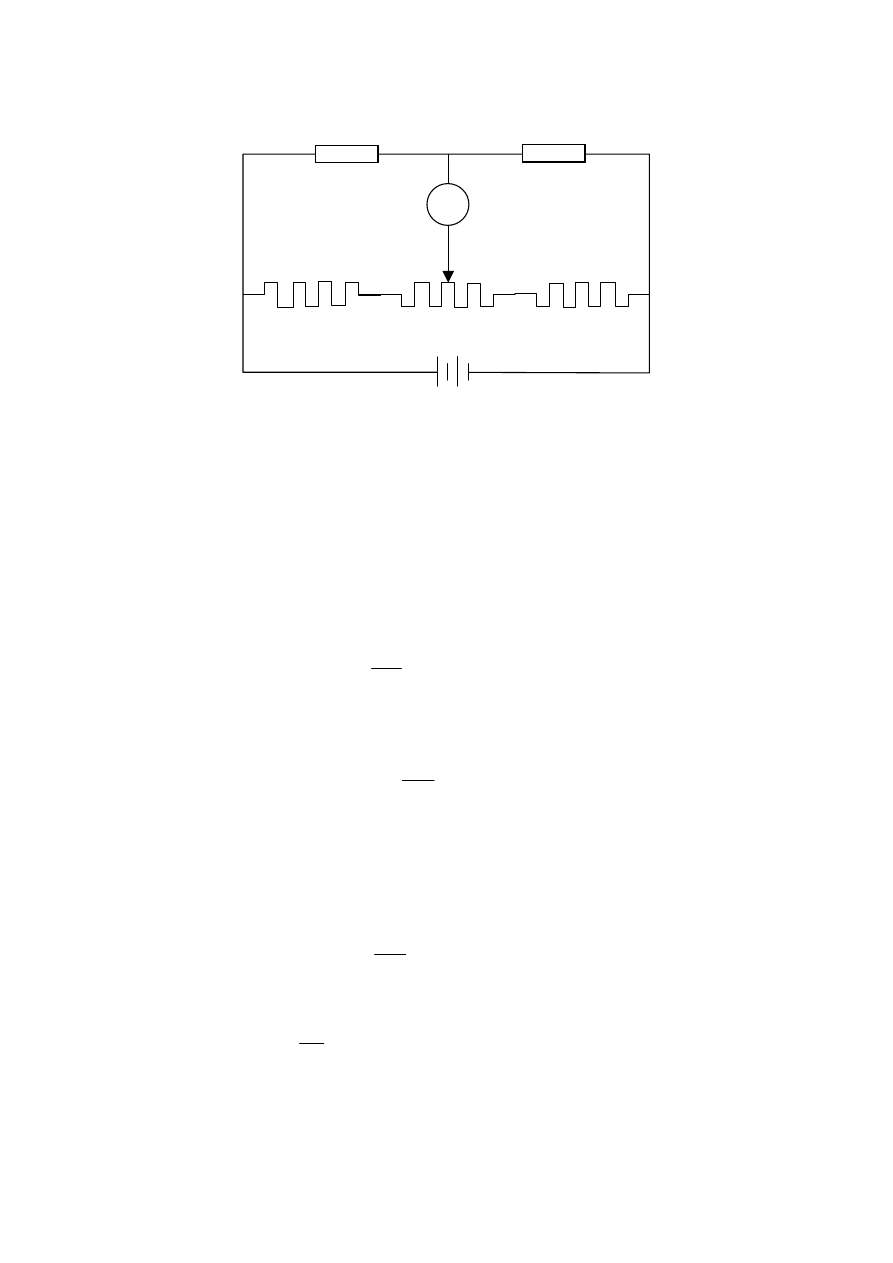
Przy pomocy tensometrów oporowych mo
ż
emy wyznacza
ć
napr
ęż
enia główne. Aby
wyznaczy
ć
trzy składowe
σ
x
,
σ
y
,
σ
xm
płaskiego stanu napr
ęż
enia w danym punkcie badanej
powierzchni, musimy okre
ś
li
ć
trzy składowe stanu odkształcenia tj. np. warto
ś
ci odkształce
ń
liniowych
ε
a
,
ε
b
,
ε
c
w trzech dowolnie wybranych kierunkach a, b i c przecinaj
ą
cych si
ę
w
wybranym punkcie A. Stosujemy w tym przypadku tzw. rozety tensometryczne – jest to kilka
tensometrów naklejonych w ró
ż
nych kierunkach
Poszczególne zmiany oporu rejestrowane s
ą
w pami
ę
ci komputera i ulegaj
ą
dalszej
obróbce. Gotowe wyniki bada
ń
napr
ęż
e
ń
i odkształce
ń
w płycie kołowej otrzymamy w
postaci wydruku tabel i wykresów.
7
Rys. 4. Rozety tensometryczne
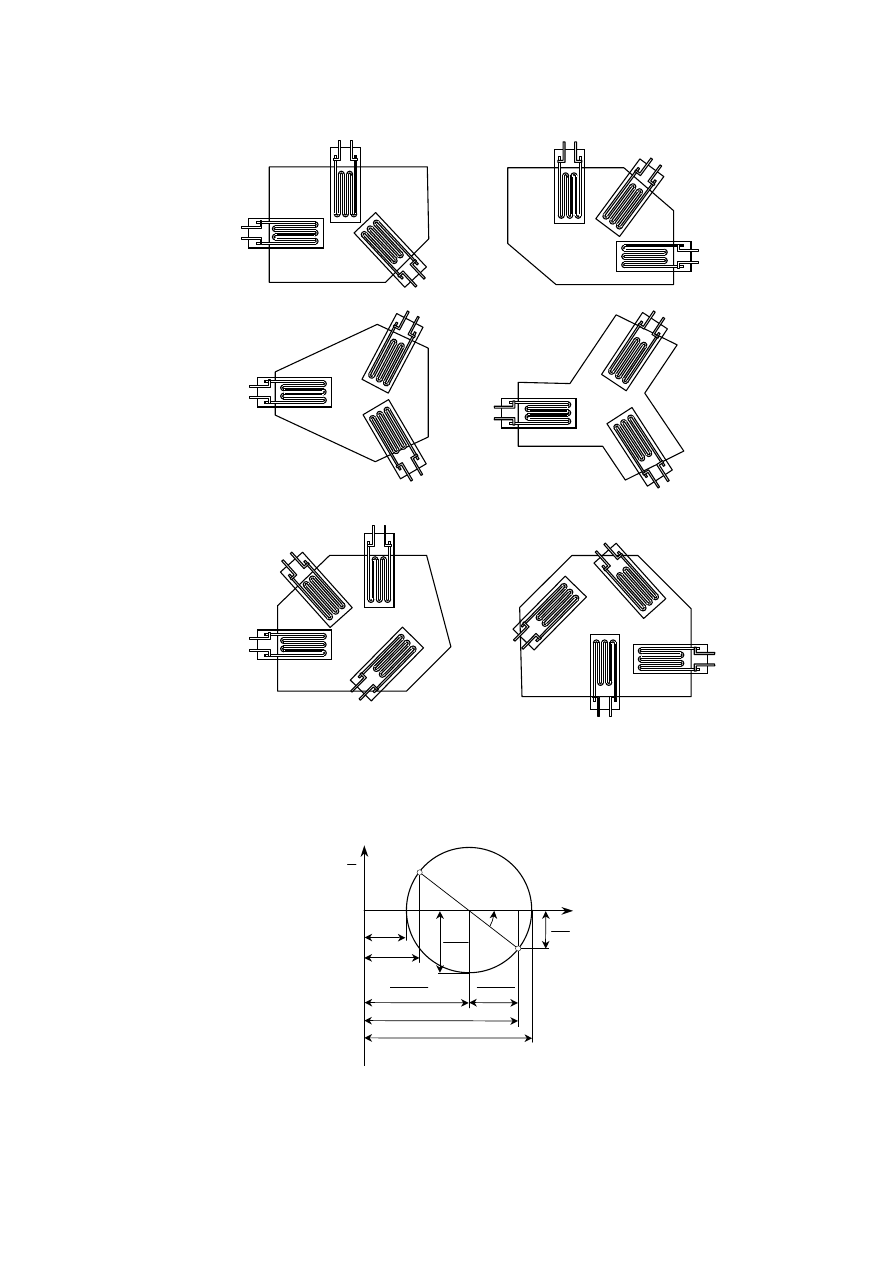
Mierz
ą
c odkształcenia w trzech wybranych kierunkach mo
ż
emy narysowa
ć
koło Mohra i
okre
ś
li
ć
wielko
ś
ci i kierunki odkształce
ń
głównych (rys. 5).
Rys. 5. Koło odkształceń Mohra
ε
2
x
x
ε
−
ε
2
x
x
ε
+
ε
2
γ
2
xy
γ
N
M
B
A
0
S
M’
ε
min
ε
y
ε
x
ε
max
2
max
γ
K
2ϕ
0
a)
b)
c)
0°
d)
e)
f)
90°
90°
225°
0°
90°
45°
0°
120°
240°
0°
120°
240°
0°
45°
135°
90°
0°
135°
45°
8
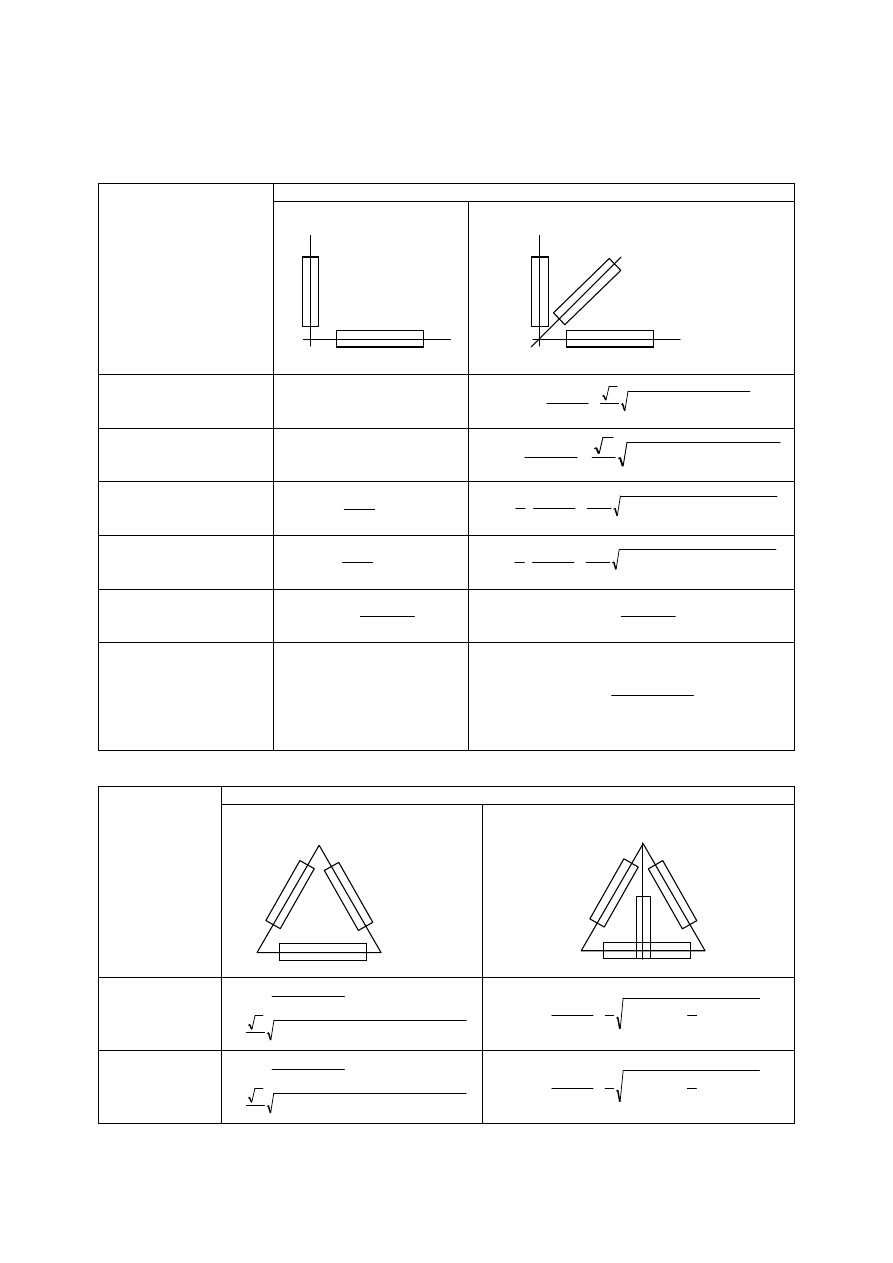
W tabeli 1 zestawiono kilka typów rozet tensometrycznych oraz wzory na ekstremalne
warto
ś
ci napr
ęż
e
ń
i ich kierunki.
Tabela 1. Zależności służące do obliczania różnych typów rozet
Typ rozety
Rodzaj określanej
dokładności
dwuczujnikowa
prostokątna
Maksymalne
odkształcenie główne
ε
max
0
max
ε
=
ε
(
)
(
)
2
90
45
2
45
0
90
0
max
2
2
2
ε
−
ε
+
ε
−
ε
+
ε
+
ε
=
ε
Minimalne odkształcenie
główne
ε
min
90
min
ε
=
ε
(
)
(
)
2
90
45
2
45
0
90
0
max
2
2
2
ε
−
ε
+
ε
−
ε
−
ε
+
ε
=
ε
Maksymalne naprężenie
główne
σ
max
(
)
90
2
0
2
max
1
E
ε
ν
+
ε
ν
−
=
σ
(
)
(
)
[
]
ε
+
ε
−
ε
+
ε
−
ε
ν
+
+
ν
−
ε
+
ε
=
σ
2
90
0
45
2
90
0
90
0
max
2
1
1
1
2
E
Minimalne naprężenie
główne
σ
min
(
)
0
2
90
2
min
1
E
ε
ν
+
ε
ν
−
=
σ
(
)
(
)
[
]
ε
+
ε
−
ε
+
ε
−
ε
ν
−
−
ν
−
ε
+
ε
=
σ
2
90
0
45
2
90
0
90
0
min
2
1
1
1
2
E
Maksymalne naprężenie
tnące
τ
max
2
min
max
max
σ
−
σ
=
τ
2
min
max
max
σ
−
σ
=
τ
Tangens podwójnego kąta
α
g
pomiędzy
maksymalnym
naprężeniem głównym i
kierunkiem
ε
0
tg2
α
g
0
2
tg
g
=
α
(
)
90
0
90
0
45
g
2
2
tg
ε
−
ε
ε
+
ε
−
ε
=
α
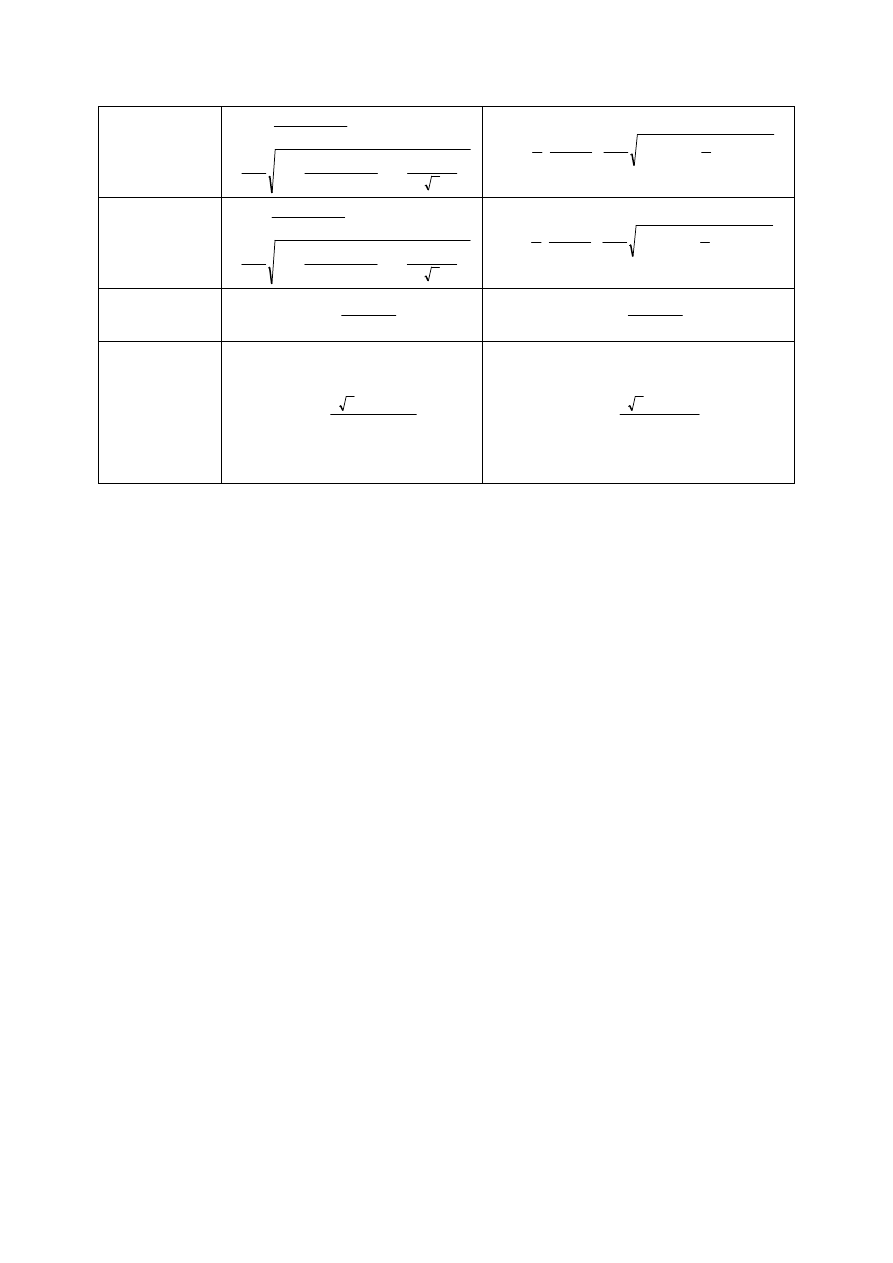
Tabela 1. cd.
Typ rozety
Rodzaj
określanej
dokładności
delta
T−delta
Maksymalne
odkształcenie
główne
ε
max
(
) (
) (
)
2
0
120
2
120
60
2
60
0
120
60
0
max
3
2
3
ε
−
ε
+
ε
−
ε
+
ε
−
ε
+
+
ε
+
ε
+
ε
=
ε
(
)
(
)
2
120
60
2
90
0
90
0
max
3
4
2
1
2
ε
−
ε
+
ε
−
ε
+
ε
+
ε
=
ε
Minimalne
odkształcenie
główne
ε
min
(
) (
) (
)
2
0
120
2
120
60
2
60
0
120
60
0
max
3
2
3
ε
−
ε
+
ε
−
ε
+
ε
−
ε
−
−
ε
+
ε
+
ε
=
ε
(
)
(
)
2
120
60
2
90
0
90
0
max
3
4
2
1
2
ε
−
ε
+
ε
−
ε
−
ε
+
ε
=
ε
ε
0
ε
90
ε
0
ε
90
ε
45
ε
0
ε
60
ε
120
ε
0
ε
60
ε
120
ε
90
9
Maksymalne
naprężenie
główne
σ
max
(
)
2
120
60
2
120
60
0
0
120
60
0
max
3
3
1
1
1
3
ε
−
ε
+
ε
+
ε
+
ε
−
ε
ν
+
+
+
ν
−
ε
+
ε
+
ε
=
σ
(
)
(
)
ε
−
ε
+
ε
−
ε
ν
+
+
ν
−
ε
+
ε
=
σ
2
120
60
2
90
0
90
0
max
3
4
1
1
1
2
E
Minimalne
naprężenie
główne
σ
min
(
)
2
120
60
2
120
60
0
0
120
60
0
min
3
3
1
1
1
3
ε
−
ε
+
ε
+
ε
+
ε
−
ε
ν
+
−
−
ν
−
ε
+
ε
+
ε
=
σ
(
)
(
)
ε
−
ε
+
ε
−
ε
ν
+
−
ν
−
ε
+
ε
=
σ
2
120
60
2
90
0
90
0
min
3
4
1
1
1
2
E
Maksymalne
naprężenie tnące
τ
max
2
min
max
max
σ
−
σ
=
τ
2
min
max
max
σ
−
σ
=
τ
Tangens
podwójnego kąta
α
g
pomiędzy
maksymalnym
naprężeniem
głównym i
kierunkiem
ε
0
tg2
α
g
(
)
(
)
120
60
0
120
60
g
2
3
2
tg
ε
+
ε
−
ε
ε
−
ε
=
α
(
)
(
)
90
0
120
60
g
3
3
2
2
tg
ε
−
ε
ε
−
ε
=
α
Ze wzgl
ę
du na przeznaczenie tensometry dzielimy na:
●
tensometry do pomiarów statycznych,
●
tensometry do pomiaru dynamicznych.
Ze wzgl
ę
du na budow
ę
tensometry dzielimy na mechaniczne, pneumatyczne, strunowe,
optyczno−mechaniczne, elektryczne, które dziel
ą
si
ę
na:
●
elektrooporowe,
●
pojemno
ś
ciowe,
●
indukcyjne,
●
piezoelektryczne,
●
magnetyczne.
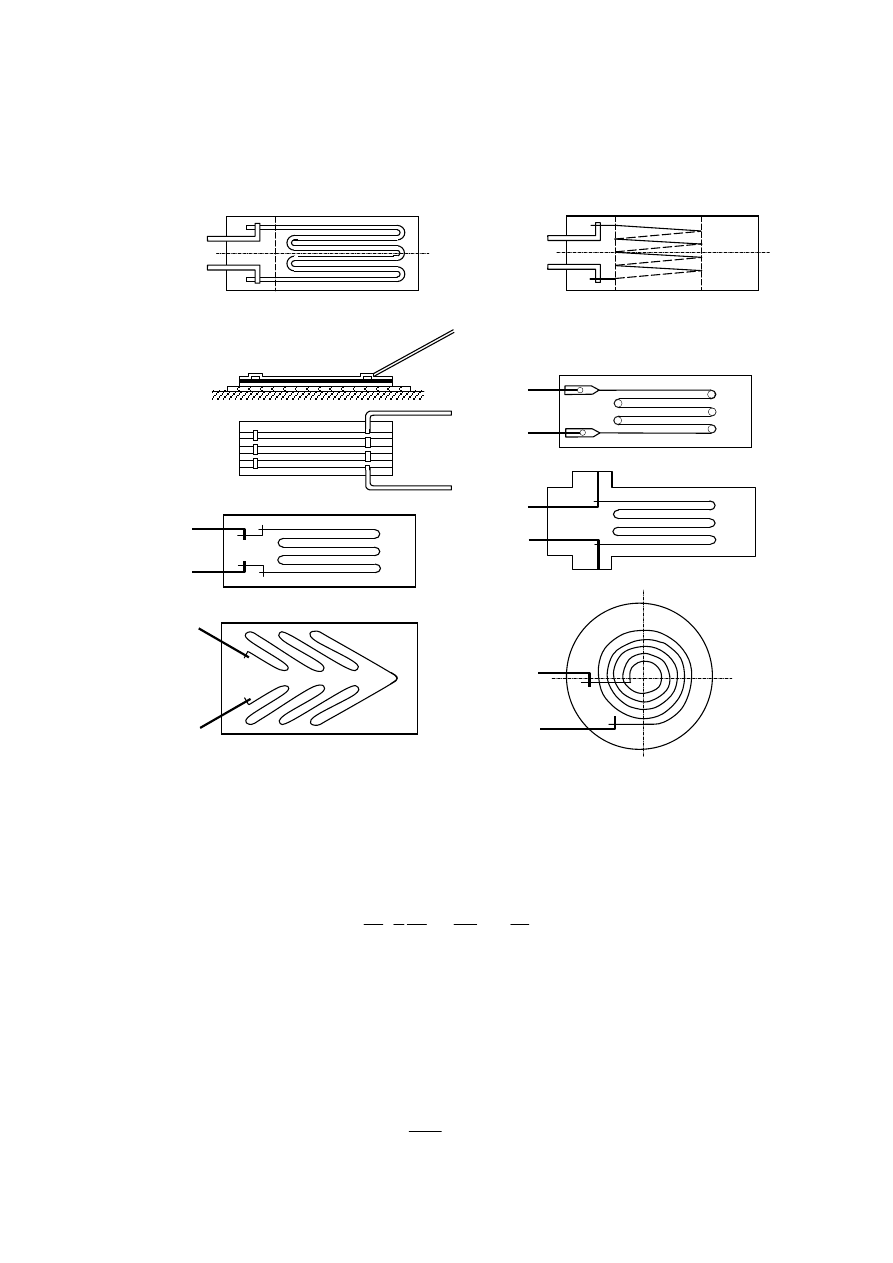
Na rys. 6 przedstawiono kilka typów najcz
ęś
ciej stosowanych tensometrów
elektrooporowych.
Zalety tensometrów oporowych:
1. Du
ż
a dokładno
ść
i czuło
ść
pomiaru obecnie budowane aparaty pomiarowe pozwalaj
ą
na odczyt mierzonego odkształcenia z dokładno
ś
ci
ą
do
ε
= 5
⋅10
−6
, co do stali
odpowiada napr
ęż
eniu
σ
= 1 N/mm
2
.
2. Mała masa oraz nieznaczne wymiary pozwalaj
ą
na stosowanie tensometrów
elektrooporowych do pomiarów napr
ęż
e
ń
w ró
ż
nych trudno dost
ę
pnych miejscach.
3. Mo
ż
liwo
ść
pomiaru napr
ęż
e
ń
na małych i silnie zakrzywionych powierzchniach.
4. Mo
ż
liwo
ść
pomiaru napr
ęż
e
ń
pochodz
ą
cych od obci
ąż
e
ń
dynamicznych.
5. Mo
ż
liwo
ść
pomiaru napr
ęż
e
ń
na elementach maszyn znajduj
ą
cych si
ę
w ruchu.
6. Mo
ż
liwo
ść
dokonywania pomiarów zdalnych z jednego miejsca operacyjnego, dla
wielu znacznie oddalonych od siebie punktów pomiarowych.
7. Ze wzgl
ę
du na bezpo
ś
rednie przekazywanie odkształce
ń
na drut oporowy tensometru
wyeliminowane s
ą
wszelkie bł
ę
dy i niedokładno
ś
ci przekładni, luzów, po
ś
lizgów,
bezwładno
ś
ci, itp. Czynników wyst
ę
puj
ą
cych w urz
ą
dzeniach tensometrów
mechanicznych.
8. Mo
ż
liwo
ść
pomiaru napr
ęż
e
ń
głównych poprzez stosowanie układów rozetkowych
umo
ż
liwiaj
ą
cych równoczesny pomiar odkształce
ń
w trzech okre
ś
lonych kierunkach.
10
Rys. 6. Rodzaje czujników: a) czujnik wężykowy, b) czujnik zygzakowy, c) czujnik kratkowy,
d) czujnik kratkowy, e i f) odmiany czujnika wężykowego, g) czujnik choinkowy, h) czujnik spiralny
3.4. Naprężenia i odkształcenia w płycie kołowej
Ze wzgl
ę
du na osiowo symetryczne obci
ąż
enie i zamocowanie zagadnienie mo
ż
emy
rozwi
ą
za
ć
teoretycznie poprzez scałkowanie nast
ę
puj
ą
cego równania
D
T
dr
dw
r
dr
d
r
dr
d
r
=
⋅
)
(
1
(17)
uwzgl
ę
dniaj
ą
c nast
ę
puj
ą
ce warunki brzegowe
r
= 0,
φ
= 0
r
= a,
φ
= 0
(18)
r
= a, w = 0
Po rozwi
ą
zaniu otrzymujemy
)
(
16
2
2
r
a
D
qr
−
=
ϕ
,
(19)
a)
c)
b)
e)
d)
f)
g)
h)
11
2
2
2
)
(
64
r
a
D
q
w
−
=
,
(20)
[
]
2
2
2
)
3
(
)
1
(
8
3
r
a
h
q
r
⋅
+
−
⋅
+
=
ν
ν
σ
,
(21)
[
]
2
2
2
)
3
1
(
)
1
(
8
3
r
a
h
q
t
⋅
+
−
⋅
+
=
ν
ν
σ
.
(22)
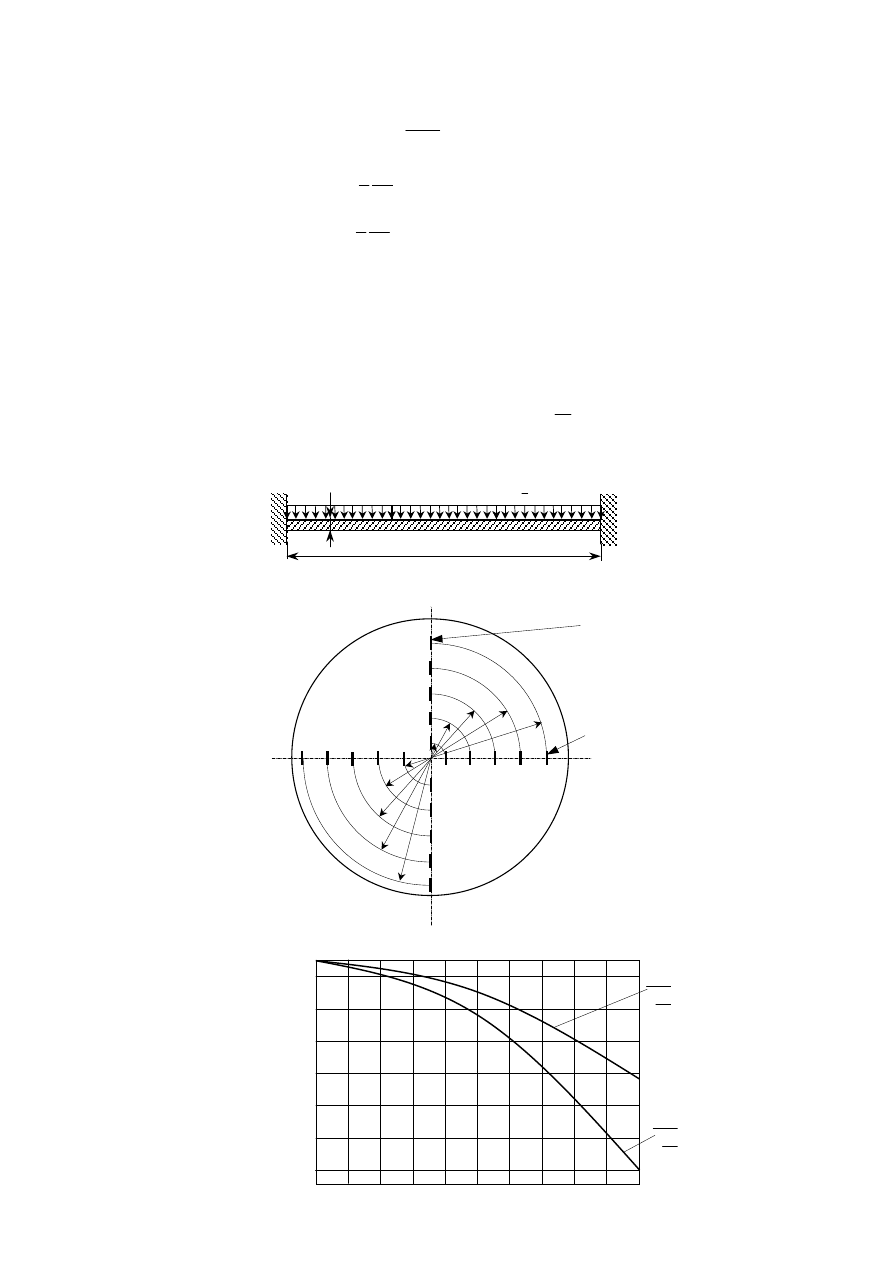
4. Wykonanie ćwiczenia
Pomiar odkształce
ń
wykonano na płycie kołowej utwierdzonej na obwodzie obci
ąż
onej
ci
ś
nieniem q (rys. 7).
Na podstawie wzorów (21) i (22) na rys. 9 przedstawiono rozkłady napr
ęż
e
ń
promieniowych i
obwodowych. Na płycie pomiarowej naklejono tensometry promieniowe i obwodowe dla
bezwymiarowego promienia i obwodowe dla promienia
a
r
n
=
ϕ
zmieniaj
ą
cego si
ę
od 0,1 do
1,0 co 0,1 (rys. 8). Na podstawie pomiarów tensometrycznych mo
ż
emy sporz
ą
dzi
ć
wykresy
rzeczywistych napr
ęż
e
ń
promieniowych i obwodowych panuj
ą
cych w płycie.
Rys. 7. Płyta kołowa obciążona ciśnieniem q
Rys. 8. Usytuowanie tensometrów oporowych
q
2a
h
Czujniki naklejone
promieniowo
Czujniki naklejone
obwodowo
r
1
r
7
r
5
r
3
r
9
r
2
r
4
r
8
r
6
r
10
0,0
0,4
0,2
−0,2
−0,4
−0,6
−0,8
0,1
0,4
0,2
0,3
0,5
0,8
0,6
0,7
0,9
2
2
t
h
a
q
σ
2
2
r
h
a
q
σ
12
Rys. 9. Rozkłady naprężeń w płycie kołowej
5. Wykonanie sprawozdania
W sprawozdaniu nale
ż
y umie
ś
ci
ć
:
1. tytuł
ć
wiczenia,
2. cele
ć
wiczenia,
3. tabel
ę
pomiarow
ą
,
4. wykresy napr
ęż
e
ń
rzeczywistych
σ
r
,
σ
t
,
5. wnioski.
Tabela pomiarowa
Odczyty na czujnikach
Przyrosty odkształceń
Przyrosty naprężeń
Nr
czujnika
Ciśnienie q
[MPa]
promieniowych
[%]
obwodowych
[%]
promieniowych
[%]
obwodowych
[%]
promieniowych
[MN/m
2
]
obwodowych
[MN/m
2
]
1
2
3
4
5
6
7
8
9
10
Literatura
[1] Bachmacz W.: Wytrzymałość materiałów. Badania doświadczalne. Skrypt Politechniki Częstochowskiej,
Częstochowa 1973.
[2] Banasik M.: Ćwiczenia laboratoryjne z wytrzymałości materiałów. PWN, Warszawa 1977.
[3] Boruszak A., Sykulski R., Wrześniowski K.: Wytrzymałość materiałów. Doświadczalne metody badań.
Wydawnictwo Politechniki Poznańskiej, Poznań 1977.
[4] Dyląg Z., Orłoś Z.: Wytrzymałość zmęczeniowa materiałów. Warszawa. WNT 1962.
[5] Jastrzębski P., Mutermilch J., Orłoś W.: Wytrzymałość materiałów. Warszawa. Arkady 1985.
[6] Katarzyński S., Kocańda S., Zakrzewski M.: Badania właściwości mechanicznych metali. WNT, Warszawa
1967.
[7] Łączkowski R.: Wytrzymałość materiałów. Gdańsk. WPG 1988.
[8] Mazurkiewicz S.: Laboratorium z wytrzymałości materiałów. Wydawnictwo Politechniki Krakowskiej,
Kraków 1978.
[9] Niezgodziński M.E., Niezgodziński T.: Wzory wykresy i tablice wytrzymałościowe. Warszawa. WNT
1996.
[10] Orłoś Z.: Doświadczalna analiza odkształceń i naprężeń. PWN, Warszawa 1977.
[11] Walczyk Z.: Wytrzymałość materiałów. Gdańsk. WPG 1998.
Wyszukiwarka
Podobne podstrony:
lwm c09 (2)
lwm c08 (2)
Podstawy zarządzania 6 01 2008 C11 ćw 5
C11 2
LWM sciaga
C11 5
lwm c04 (2)
Sprawozdanie LWM tensometria
C11 3
Nissan Tiida, typ C11, 2006
C11 Liczby zespolone
lwm c03 (2)
Celestron C6, C8, C9 25, C11 SGT
C11, SGSP, SGSP, cz.1, hydromechanika, Hydromechanika, instrukcje stare
lwm pyt
C11 sch
C11 6
C-11, Sprawozdanie z ˙wiczenia C11
więcej podobnych podstron