1
Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego:
Badania zginanych belek
oprac. dr inż. Ludomir J. JANKOWSKI, dr inż. Anna NIKODEM
1.
Wprowadzenie
W wytrzymałości materiałów stan obciążenia materiału, w którym na materiał działa
moment gnącym, pochodzący od pary sił działających w płaszczyźnie przekroju wzdłużnego
materiału, nazywamy zginaniem. Efektem kinematycznym działania momentu Mg jest
wygięcie pręta. Ogólnie, pręty pracujące na zginanie nazywane są belkami. Jak wiadomo,
dowolny układ sił można zredukować do siły wypadkowej i jednej pary sił (momentu) [1].
Przyjmijmy, że w dowolnym przekroju poprzecznym belki układ sił można sprowadzić do
jednej składowej momentu zginającego M
g
(rys. 1a), przy czym punktem redukcji jest środek
tego przekroju. W takim przypadku belka jest poddana czystemu zginaniu.
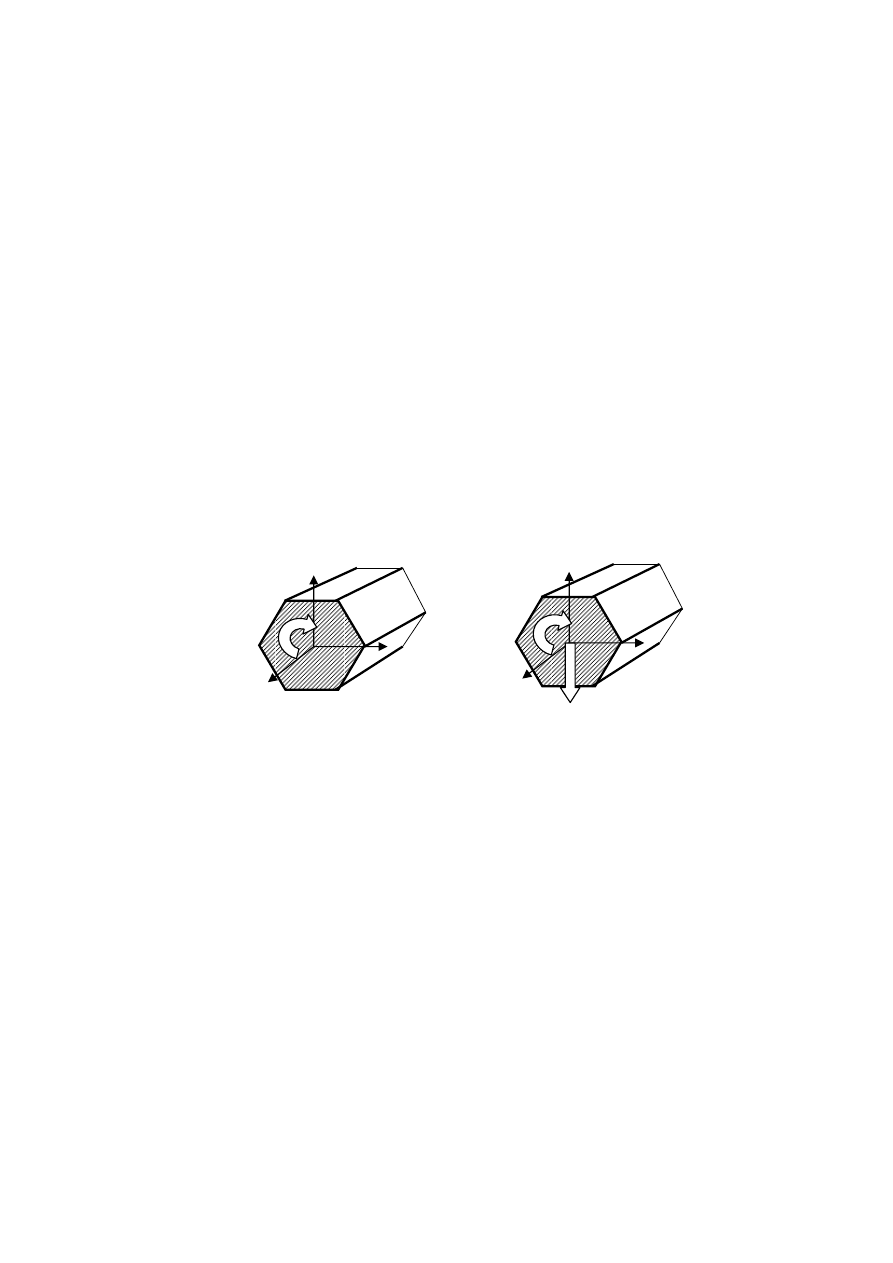
a)
b)
Rys. 1. Schemat obciążenia przekroju belki: a) czyste zginanie,
b)
zginanie z udziałem siły poprzecznej (tnącej)
Jeśli w przekroju działa dodatkowo siła styczna T (rys. 1b), to belka jest zginana
z udziałem sił poprzecznych. Jeśli wszystkie siły działające na belkę (obciążenia zewnętrzne
i reakcje) leżą w jednej płaszczyźnie (płaszczyźnie zginania), przechodzącej przez oś belki, to
taki przypadek zginania nazywany jest zginaniem prostym. Jeśli na skutek działających
obciążeń oś belki ma postać krzywej przestrzennej, to belka jest poddana zginaniu ukośnemu.
Analiza naprężeń i odkształceń zginanych belek wykorzystuje następujące założenia:
•
Obciążenia działają w płaszczyźnie symetrii belki zwanej płaszczyzną zginania.
•
Płaskie przekroje belki, prostopadłe do osi belki przed jej odkształceniem, pozostają
prostopadłe do osi belki odkształconej (hipoteza płaskich przekrojów, hipoteza
y
x
z
M
g
y
T
M
g
z
x
2
Bernoulliego) – obrót przekrojów. Hipotezę tę, mającą podstawowe znaczenie
w teorii zginania prętów, po raz pierwszy postawił Bernoulli w 1694 roku.
•
włókna belki doznają odkształceń na skutek obrotów przekrojów, przy czym nie
występują oddziaływania poprzeczne (naciski) pomiędzy nimi – we włóknach panuje
jednoosiowy stan naprężenia (w zależności od ich położenia -rozciąganie lub
ś
ciskanie).
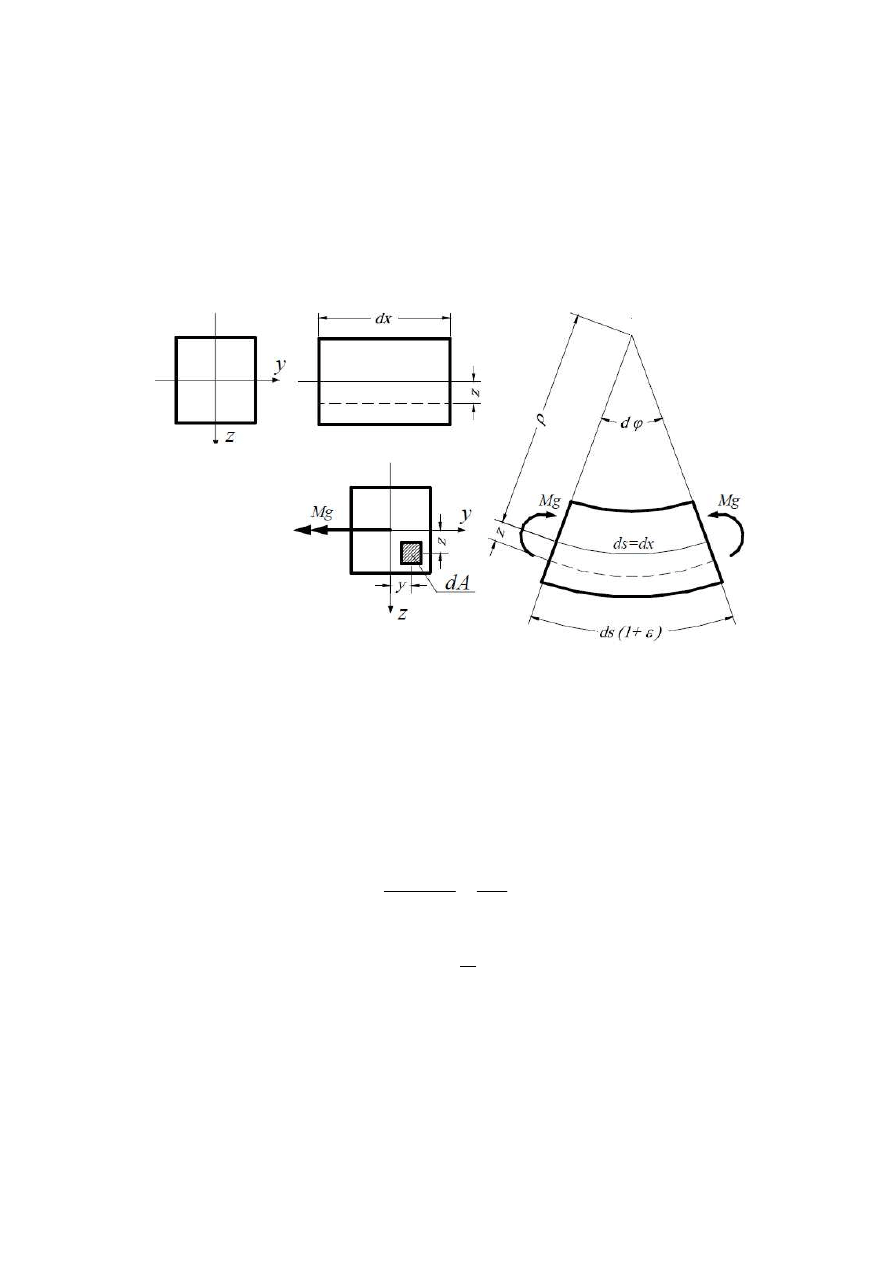
Rys.2 Wycinek dx pręta przed i po odkształceniu
Na rys. 2 przedstawiono element pręta przed i po odkształceniu. Weźmy pod uwagę
włókno odległe od warstwy obojętnej o z, długość jego wynosiła pierwotnie dx = ds, po
odkształceniu wynosi ds (1+
ε
), gdzie
ε
jest wydłużeniem właściwym (ρ - promień krzywizny
warstwy obojętnej).
Z zależności geometrycznych wynika:
ρ
ρ
ε
−
=
+
−
+
ds
z
ds
)
1
(
(1)
stąd:
ρ
ε
z
−
=
(2)
Siły zewnętrzne działające na część belki po jednej stronie przekroju redukują się do
momentu Mg.
3
2.
Wyznaczanie modułu Younga
Rozważymy czyste zginanie jednorodnego pręta pryzmatycznego wywołane przez
moment zginający Mg. Mając na uwadze zasadę de Saint-Venanta, rozważania ograniczymy
do przekrojów dostatecznie oddalonych od końców pręta i pominiemy ewentualne zaburzenia
wynikające ze sposobu realizacji obciążeń.
Pod wpływem momentu zginającego (wektor Mg leży w płaszczyźnie przekroju),
część włókien pręta jest ściskana, a pozostała część rozciągana, dlatego zginanie belki można
sprowadzić do jednoczesnego jej rozciągania i ściskania. Włókna ściskane ulegają skróceniu,
a rozciągane wydłużeniu. Granicę obu części pręta stanowi warstwa utworzona z tzw.
włókien obojętnych, których odkształcenia liniowe (wydłużenia lub skrócenia względne) są
równe zeru. Powyżej tej powierzchni siły deformujące mają kierunek rozciągający warstwy
górne, poniżej powodują ściskanie warstw dolnych. Siły występują parami i tworzą moment
Mg zginający względem linii neutralnej.
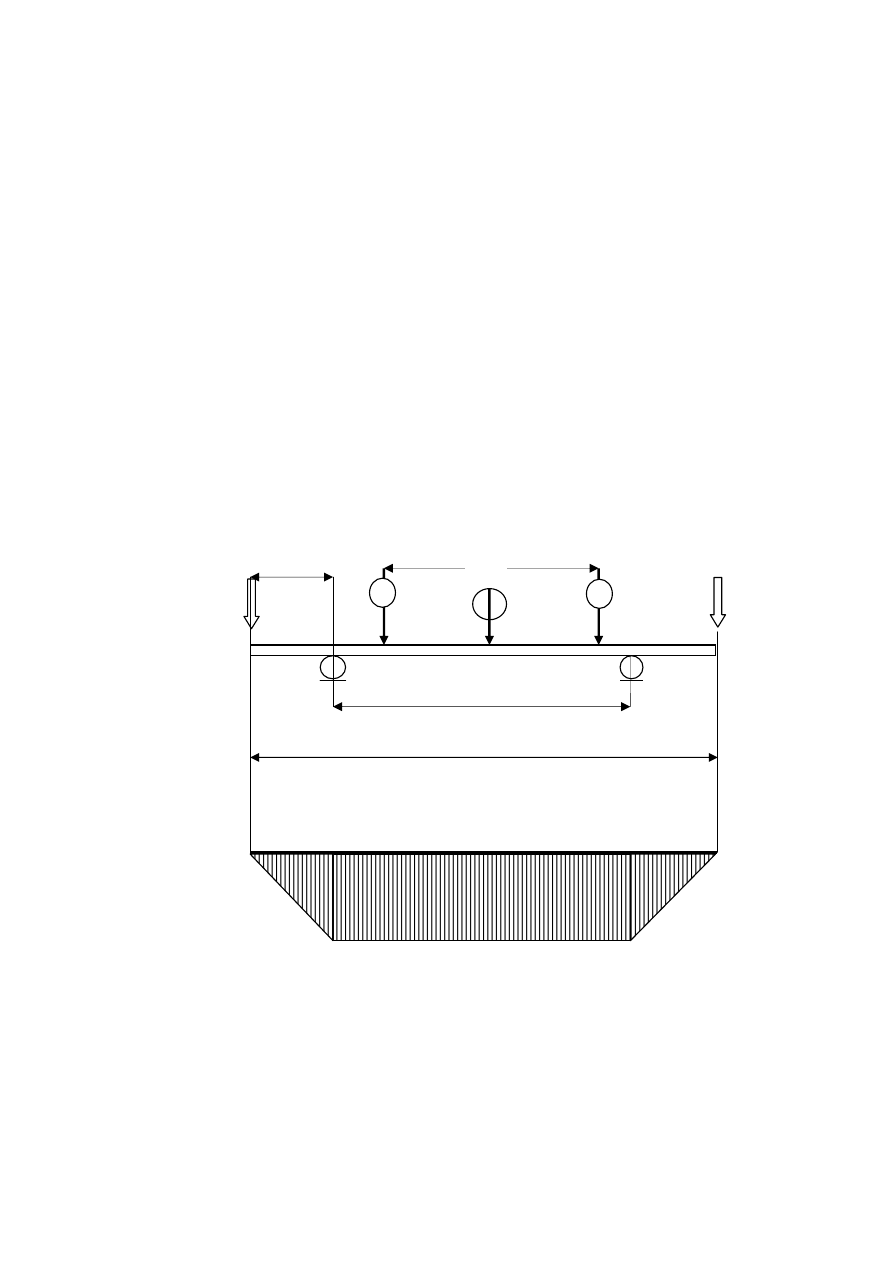
Rys. 3
Schemat zginania czteropunktowego
Siły zewnętrzne działające na część belki po jednej stronie przekroju redukują się do
momentu Mg. Uwzględniając wewnętrzne siły elementarne
σ
dA tworzące przestrzenny układ
sił równoległych, możemy dla odciętej części belki napisać następujące warunki równowagi:
l
l
1
M
g
= -Pa
P
P
a
l
p
2
3
1

4
∑
=
0
x
P
0
=
⋅
∫
A
dA
σ
(3)
∑
=
0
z
M
0
=
⋅
∫
A
dAy
σ
(4)
∑
=
0
y
M
0
=
−
⋅
∫
g
A
M
z
dA
σ
(5)
W zakresie odkształceń liniowo-sprężystych (a więc w zakresie obowiązywania prawa
Hooke’a) odkształcenia włókien belki są wprost proporcjonalne do naprężenia (6).
E
g
σ
ε
=
(6)
gdzie: E – moduł sprężystości podłużnej (Younga)
Wyrażając w równaniu (6)
ε
przez
σ
, otrzymamy wzór:
z
E
ρ
σ
−
=
(7)
Relacja (8) ustala prawo rozkładu naprężeń w przekroju – ich wielkości są proporcjonalne do
odległości od osi obojętnej przekroju. Wielkość
σ
wstawiamy do równań (3), (4) i (5).
0
=
⋅
−
∫
A
dA
z
E
ρ
(8)
0
=
⋅
−
∫
A
ydA
z
E
ρ
(9)
g
A
M
dA
z
E
=
⋅
−
∫
2
ρ
(10)
Spełnienie równania (8) pociąga za sobą warunek, iż moment statyczny przekroju
względem osi obojętnej y jest równy zeru, stąd wniosek, że oś obojętna przekroju musi
przechodzić przez jego środek ciężkości.
Spełnienie równania (9) pociąga za sobą warunek , że moment dewiacji względem osi
prostokątnych przekroju, z których jedna jest osią obojętną i ma kierunek wektora momentu
gnącego, jest równy zeru|, stąd wniosek, że założenie mówiące o zgodności kierunku wektora
momentu gnącego i osi obojętnej przekroju będzie spełnione tylko wówczas, gdy kierunek
wektora momentu gnącego będzie się pokrywał z kierunkiem jednej z głównych (centralnych)
osi bezwładności przekroju.
Czystemu zginaniu (M
g
= const) prostej belki, o stałym przekroju poprzecznym
towarzyszy ugięcie, któremu odpowiada krzywizna osi określona wzorem, dlatego też można
wyprowadzić zależność pomiędzy momentem zginającym i modułem sprężystości materiału
belki.
5
Równanie (10) pozwoli ustalić związki między krzywizną
ρ
1
i naprężeniami a momentem
gnącym. Uwzględniwszy, że
∫
=
A
y
I
dA
z
2
, otrzymamy:
y
g
EI
M
−
=
ρ
1
(11)
Wzór ten określa odkształcenie pręta, wyrażające się w zakrzywieniu jego osi. Wielkość EI
y
nazywamy sztywnością na zginanie. Wstawiając, na podstawie równania (7)
z
E
⋅
=
−
σ
ρ
1
,
otrzymujemy:
y
g
I
z
M
−
=
σ
(12)
Z wzoru (11) wynika, że linia ugięcia jest częścią okręgu o promieniu ρ. Ponadto, przy
znajomości wielkości M
g
i I
z
(moment bezwładności przekroju) oraz dokonując pomiaru
krzywizny 1/ρ, można wyznaczyć wartość modułu Younga materiału belki.
Krzywiznę 1/ρ można wyznaczyć mierząc strzałki ugięcia belki f, jest ona miarą
odkształcenia pręta i jej wartość zależy od przyłożonej siły F, od rozmiarów pręta (jego
długości l, wysokości h i szerokości b) oraz od rodzaju materiału (moduł Younga E). Strzałkę
ugięcia można wyznaczyć np. czujnikami zegarowymi, w miejscach w których belka
najbardziej się ugina, w punktach pokazanych na rys. 3 (w tym przykładzie w celu
wyeliminowania wpływu przemieszczeń podpór pomiar ugięć przeprowadzany jest za
pomocą trzech czujników).
Belka przedstawiona poddana jest zginaniu stałym momentem Mg = -P·a, (siła tnąca
T=0). Część belki pomiędzy podporami poddana jest więc czystemu zginaniu.
Na odcinku pomiarowym l
p
strzałka ugięcia wynosi:
2
3
1
2
f
f
f
f
+
−
=
(13)
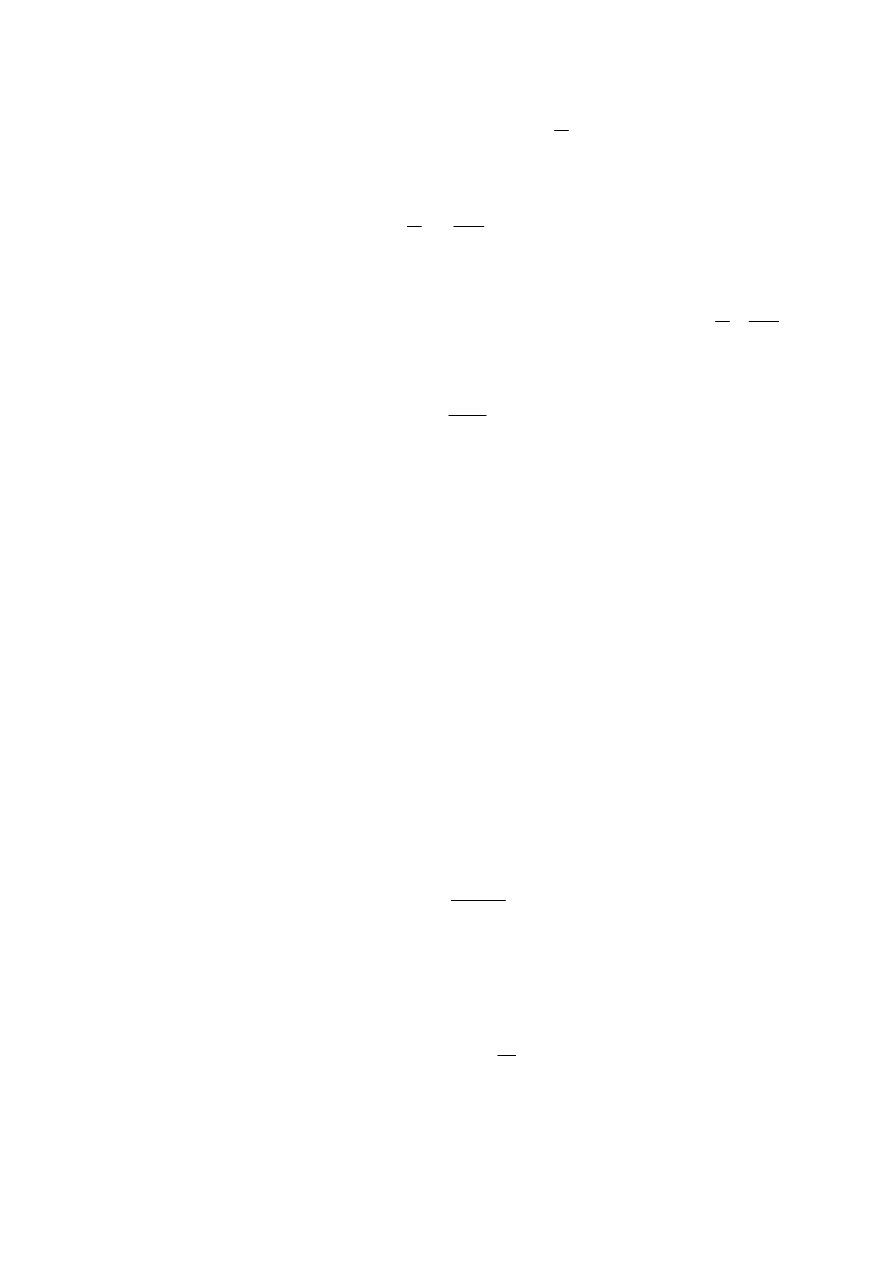
Pomiar w punktach końcowych odcinka l
p
umożliwia uniezależnienie się od
przemieszczeń podpór (rys.4).
Ponieważ, jak już wspomniano, linia ugięcia jest w tym przedziale belki łukiem okręgu, to:
2
2
2
)
2
(
)
(
p
l
f
+
−
=
ρ
ρ
(14)
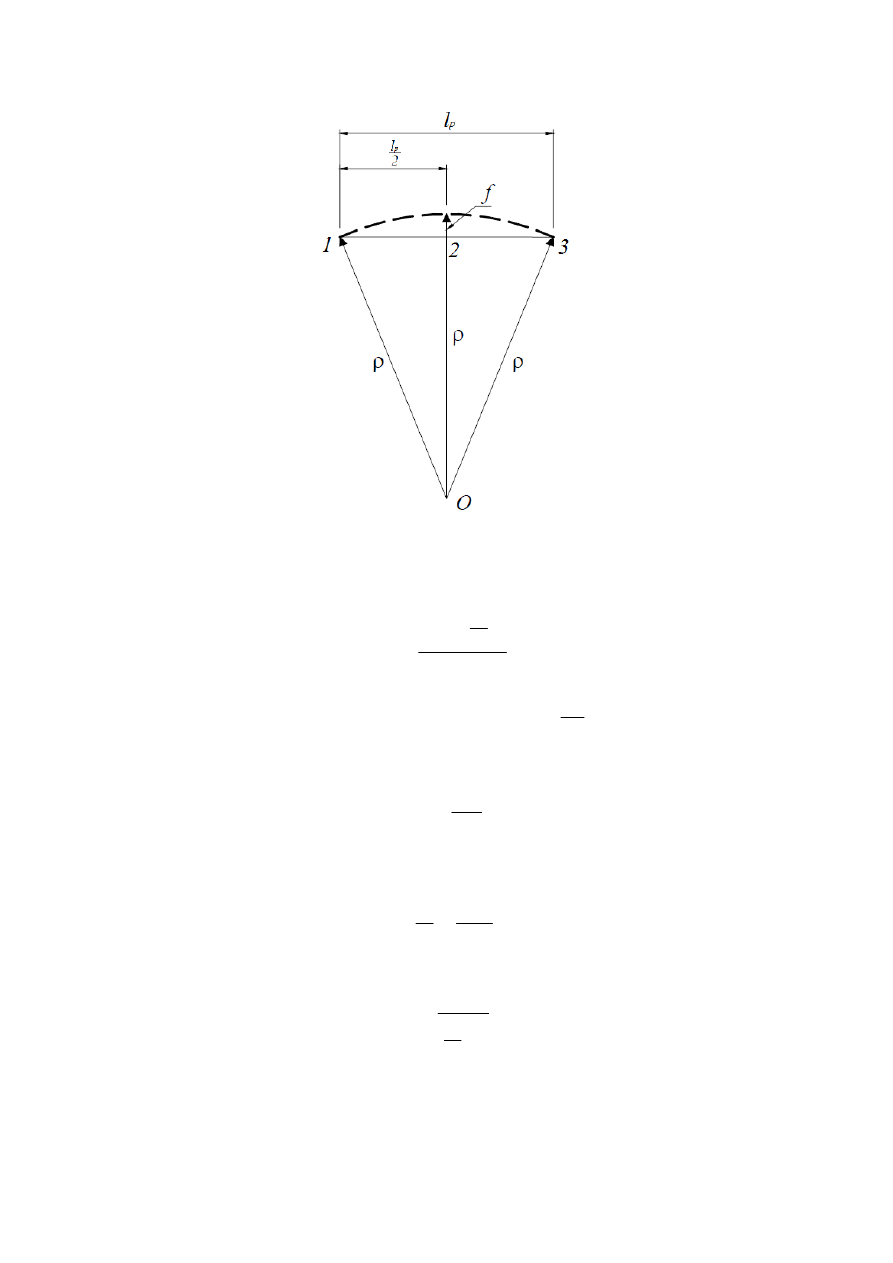
6
Rys.4 Zależności geometryczne w zginanej belce
Promienia krzywizny określony jest zależnością:
f
l
f
p
2
)
2
(
2
2
+
=
ρ
(15)
Wielkość przemieszczenia f jest bardzo mała, zatem
0
2
≅
f
,
)
1
2
(
<<
p
l
f
. Wzór (15) przybiera
więc postać:
f
l
p
8
2
≈
ρ
(16)
Jeżeli belka poddana jest czystemu zginaniu, to krzywizna belki określona jest wzorem:
y
g
EI
M
=
−
ρ
1
(17)
stąd:
y
g
I
M
E
ρ
1
−
=
(18)
Przekształcając wzór (18) ze względu na promień krzywizny ρ oraz uwzględniając, że
moment gnący jest ujemny (Mg < 0) otrzymujemy zależność pozwalającą na wyznaczenie
modułu Young’a w postaci:
7
y
g
I
M
P
E
⋅
=
(19)
Przykładowo, belka o przekroju prostokątnym, szerokości b i grubości h, jest zginana
czystym momentem zginającym Mg = Pa (rys. 2). Moment bezwładności przekroju
poprzecznego Iz, określony jest wzorem (20).
12
3
bh
I
y
=
(20)
Ostatecznie, moduł Younga E określa wzór:
f
P
bh
al
f
bh
l
Pa
E
p
p
3
2
3
2
2
3
2
3
=
⋅
⋅
=
(21)
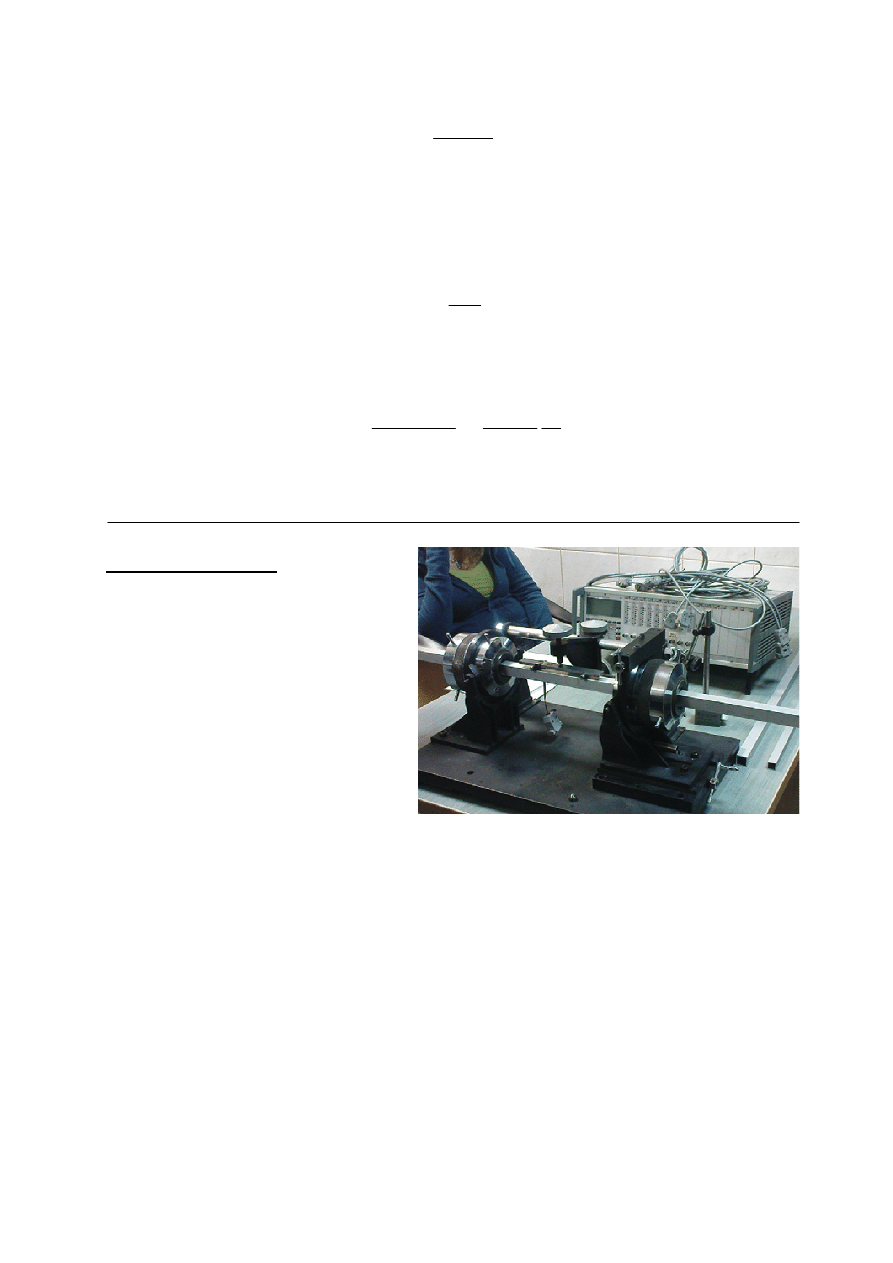
Przebieg ćwiczenia:
Celem ćwiczenia jest zapoznanie
studentów ze zjawiskami występującymi
podczas zginania belek. Belki poddane
zginaniu
wykonano
z
profili
aluminiowych o przekroju kwadratowej
rury o różnych wymiarach.
1.
Pomiar wielkości geometrycznych badanych belek
2.
Pomiar wartości strzałki ugięcia. Pomiar przeprowadzamy dla różnych wartości obciążeń.
Wartości strzałki ugięcia odczytujemy wykorzystując czujnik zegarowy.
3.
Wyznaczenie wartości modułu Young’a dla różnych układów i różnych wartości
obciążeń. Korzystając z wartości geometrycznych badanego układu oraz ze wzoru 21
obliczyć wartości modułów Younga.
Wyszukiwarka
Podobne podstrony:
Gor±czka o nieznanej etiologii
02 VIC 10 Days Cumulative A D O Nieznany (2)
Abolicja podatkowa id 50334 Nieznany (2)
45 sekundowa prezentacja w 4 ro Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
Mechanika Plynow Lab, Sitka Pro Nieznany
katechezy MB id 233498 Nieznany
2012 styczen OPEXid 27724 Nieznany
metro sciaga id 296943 Nieznany
Mazowieckie Studia Humanistyczn Nieznany (11)
cw 16 odpowiedzi do pytan id 1 Nieznany
perf id 354744 Nieznany
DO TEL! 5= Genetyka nadci nieni Nieznany
Opracowanie FINAL miniaturka id Nieznany
3 Podstawy fizyki polprzewodnik Nieznany (2)
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
więcej podobnych podstron