10. Zabezpieczenia cyfrowe
Początek: lata
70-te
Korzyści:
•
Możliwość łatwego komunikowania się między urządzeniami, zmniejszenie ilości
połączeń kablowych
•
Łatwość przechowywania dużych zasobów informacji
•
Możliwość realizacji złożonych algorytmów działania zabezpieczeń
•
Możliwość samotestowania urządzeń
•
Zredukowanie kosztu zabezpieczeń
Typy architektury zabezpieczeń cyfrowych:
•
Rozproszone urządzenia cyfrowe
•
Układy zintegrowane
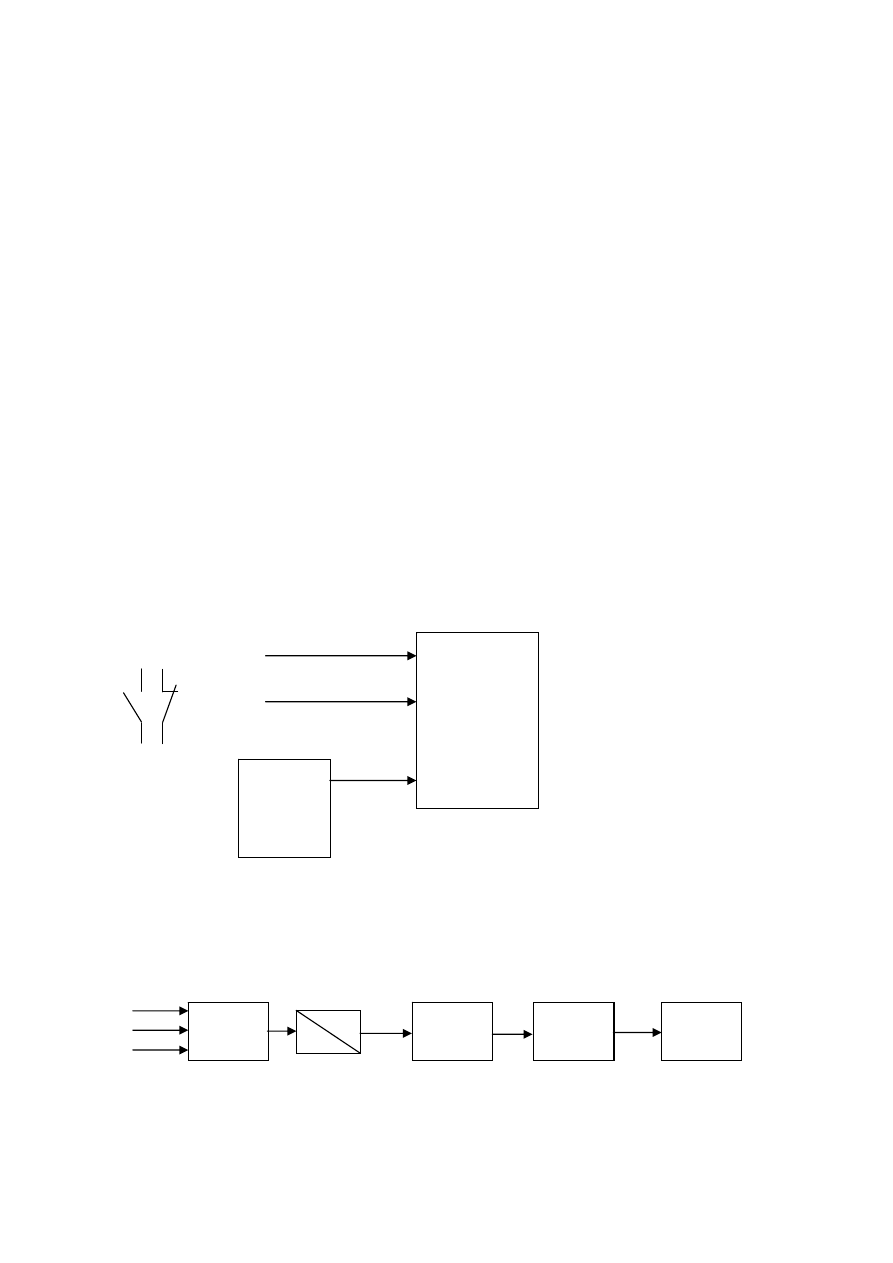
Źródła informacji zabezpieczeń cyfrowych:
(I, U) sygnały analogowe
sygnały dwustanowe
z.c.
z.c.
Dyskretyzacja sygnałów analogowych
Sygnały
analogowe
Wstępne
Filtracja
Pomiary
Logika
A
C
Przetwarzanie
analogowa
cyfrowe
i decyzja
cyfrowe
1
Filtracja analogowa - filtr analogowy dolnoprzepustowy, odfiltrowanie wyższych
częstotliwości zbędnych w dalszym procesie obróbki sygnału
Filtr A/C -
fi - częstotliwość próbkowania
fp
4
fi
⋅
≥
fp - częstotliwość sygnału przydatnego do dalszej obróbki
3
fp
fi
fc
fp
−
<
<
fc - częstotliwość odcięcia filtru
dolnoprzepustowego
Przetwornik próbkuje sygnał z częstotliwością fi zamieniając każdą z próbek na słowo
o długości m bitów (plus bit znaku).
Liczba dyskretnych stanów (przedziałów) odwzorowana słowem m-bitowym.
1
m
2
N
−
=
np. m=3 - długość słowa
7
1
3
2
N
=
−
=
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
N
Z
DZ
=
DZ - różnica wartości sygnału analogowego między dwoma sąsiednimi poziomami
cyfrowymi,
N - maksymalny zakres cyfrowy,
Z - maksymalny zakres analogowy
Pomiar: (Xmin, Xmax)
Xmin, Xmax - najmniejsza i największa spodziewana wartość sygnału analogowego
ε - wymagany względny poziom dokładności pomiaru sygnału analogowego
2
⎪
⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
⋅
ε
⋅
≥
⋅
≥
ε
≥
min
X
max
X
5
.
0
N
min
X
DZ
5
.
0
max
X
Z
Na podstawie obliczonego N oblicza się długość słowa przetwornika pomiarowego
Przykład:
Xmin = 1 V;
Xmax = 150 V,
ε = 0.01 (1%)
)
8192
13
2
(
;
13
m
;
7500
1
01
.
0
150
5
.
0
N
=
=
=
⋅
⋅
≥
Wstępne przetwarzanie cyfrowe
• Filtracja cyfrowa - wydobycie z sygnału mierzonego składowych o określonej
częstotliwości lub składowej symetrycznej
• Ortogonalizacja przebiegów sinusoidalnych - wyznaczenie składowych ortogonalnych -
amplitudy i fazy
Cyfrowa filtracja częstotliwościowa
• Filtry o nieskończonej odpowiedzi impulsowej (NOI), (IIR - infinite impulse response) -
filtry rekursywne
• Filtry o skończonej odpowiedzi impulsowej (SOI) - (FIR - finite impulse response) -
filtry nierekursywne
• Filtry Kalmana
3
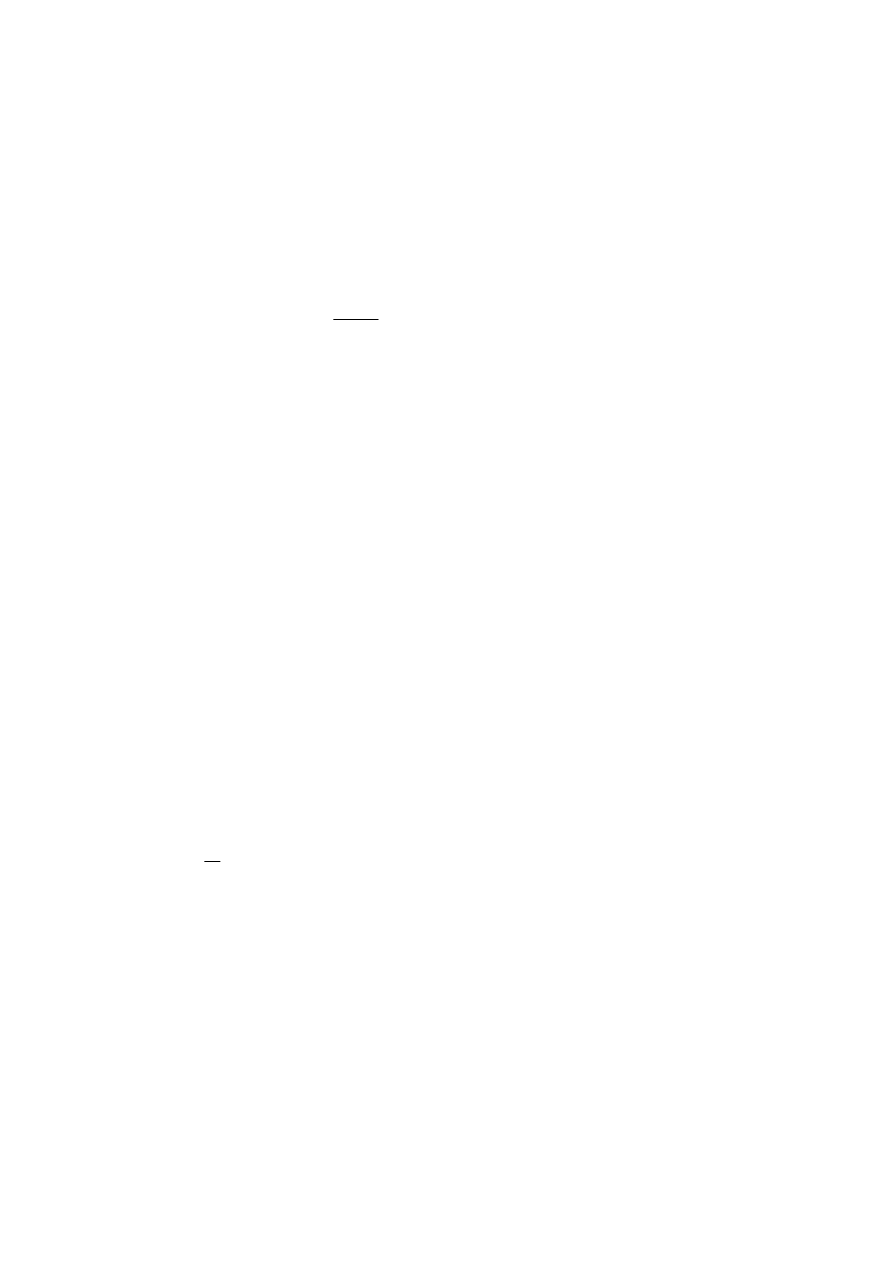
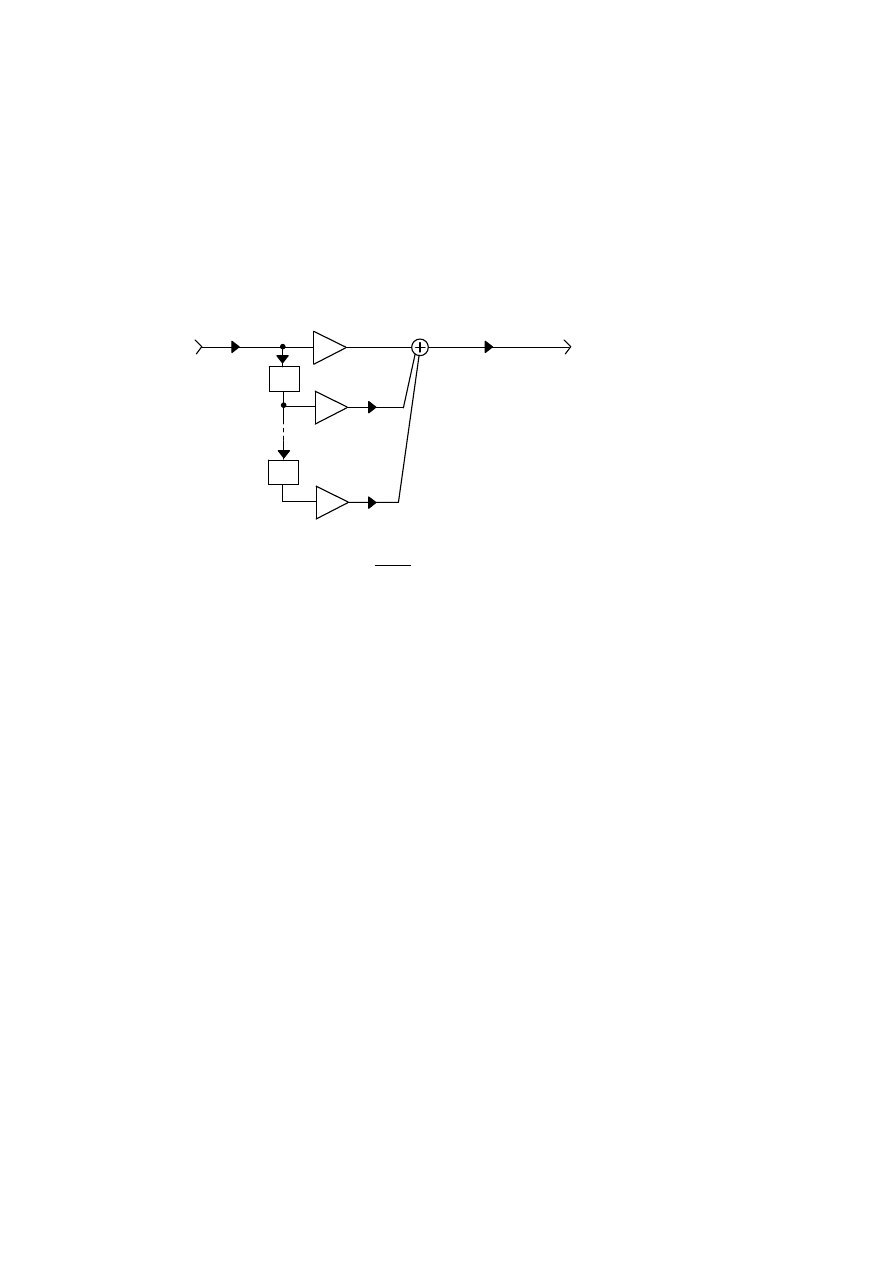
Filtr NOI
Reakcja na pobudzenie o skończonym czasie trwania jest (teoretycznie) nieskończenie długa
Z
-1
Z
-1
Z
-1
Z
-1
WEJ
WYJ
b
0
-a
q
-a
0
b
p
b
1
a
k
, b
k
> 0 - współczynniki wzmocnienia
Algorytm filtru NOI
Transmitancja filtru
)
z
(
X
)
z
(
Y
)
z
(
H
=
przy czym;
)
q
z
q
a
.........
1
z
1
a
0
a
(
1
p
z
p
b
.........
1
z
1
b
0
b
)
z
(
H
−
⋅
+
+
−
⋅
+
+
−
⋅
+
+
−
⋅
+
=
z -
wartość próbki
z
-k
-
opóźnienie próbki o k okresów próbkowania (czas: k
⋅Ti)
Przez dobór współczynników a
k
i b
k
można uzyskać filtr dolnoprzepustowy lub pasmowy.
Charakterystyka widmowa:
∑
∑
=
⋅
ω
⋅
⋅
−
⋅
+
=
⋅
ω
⋅
⋅
−
⋅
=
ω
q
0
k
)
i
T
k
j
exp(
k
a
1
p
0
k
)
i
T
k
j
exp(
k
b
)
j
(
H
T
i
- okres próbkowania
4
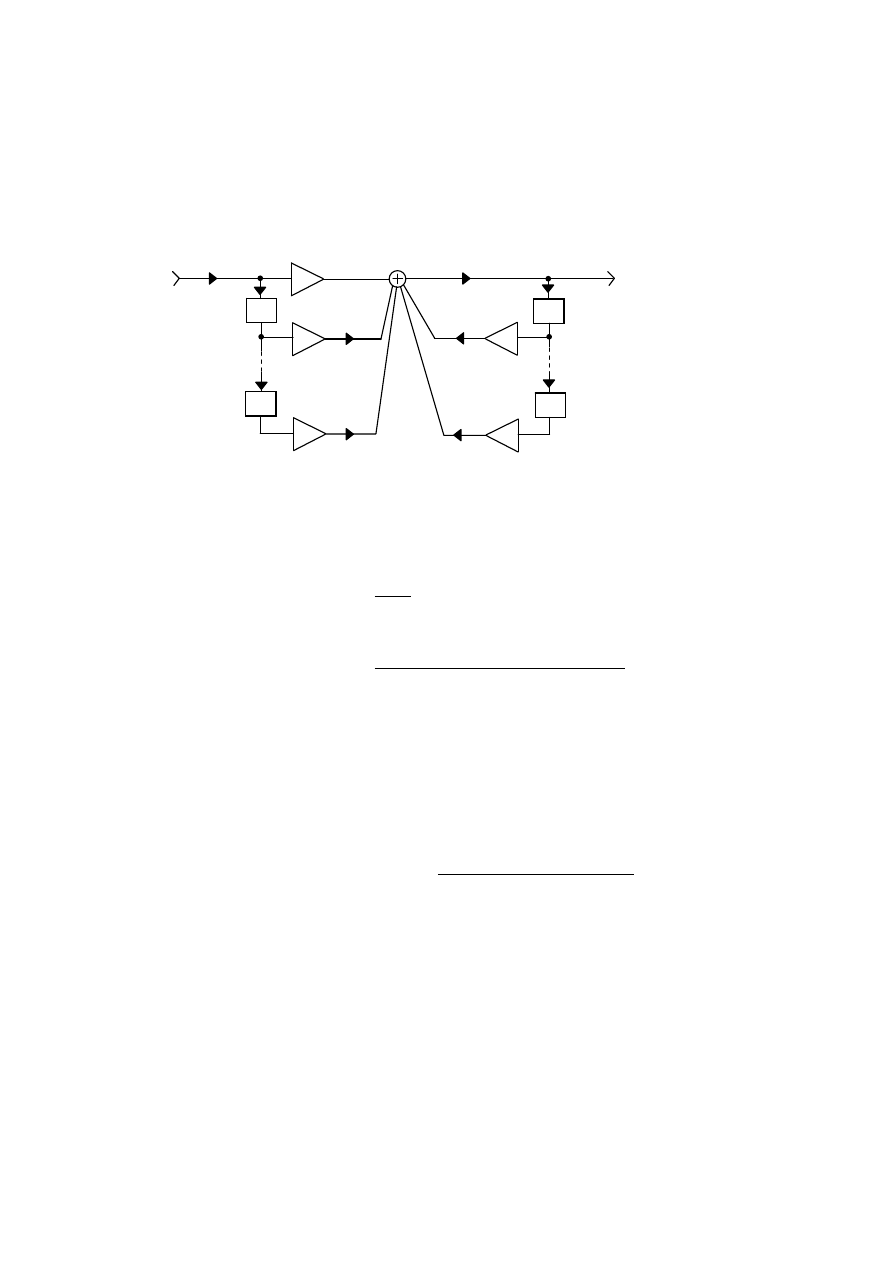
Filtr SOI
Reakcja na pobudzenie o skończonym czasie trwania jest skończona
Z
-1
Z
-1
WEJ
b
0
b
WYJ
p
b
1
Transmitancja filtru
)
z
(
X
)
z
(
Y
)
z
(
H
=
przy czym;
p
z
p
b
.........
1
z
1
b
0
b
)
z
(
H
−
⋅
+
+
−
⋅
+
=
z -
wartość próbki
z
-k
-
opóźnienie próbki o k okresów próbkowania (czas: k
⋅Ti)
Charakterystyka widmowa:
∑
=
⋅
ω
⋅
⋅
−
⋅
=
ω
p
0
k
)
i
T
k
j
exp(
k
b
)
j
(
H
T
i
- okres próbkowania
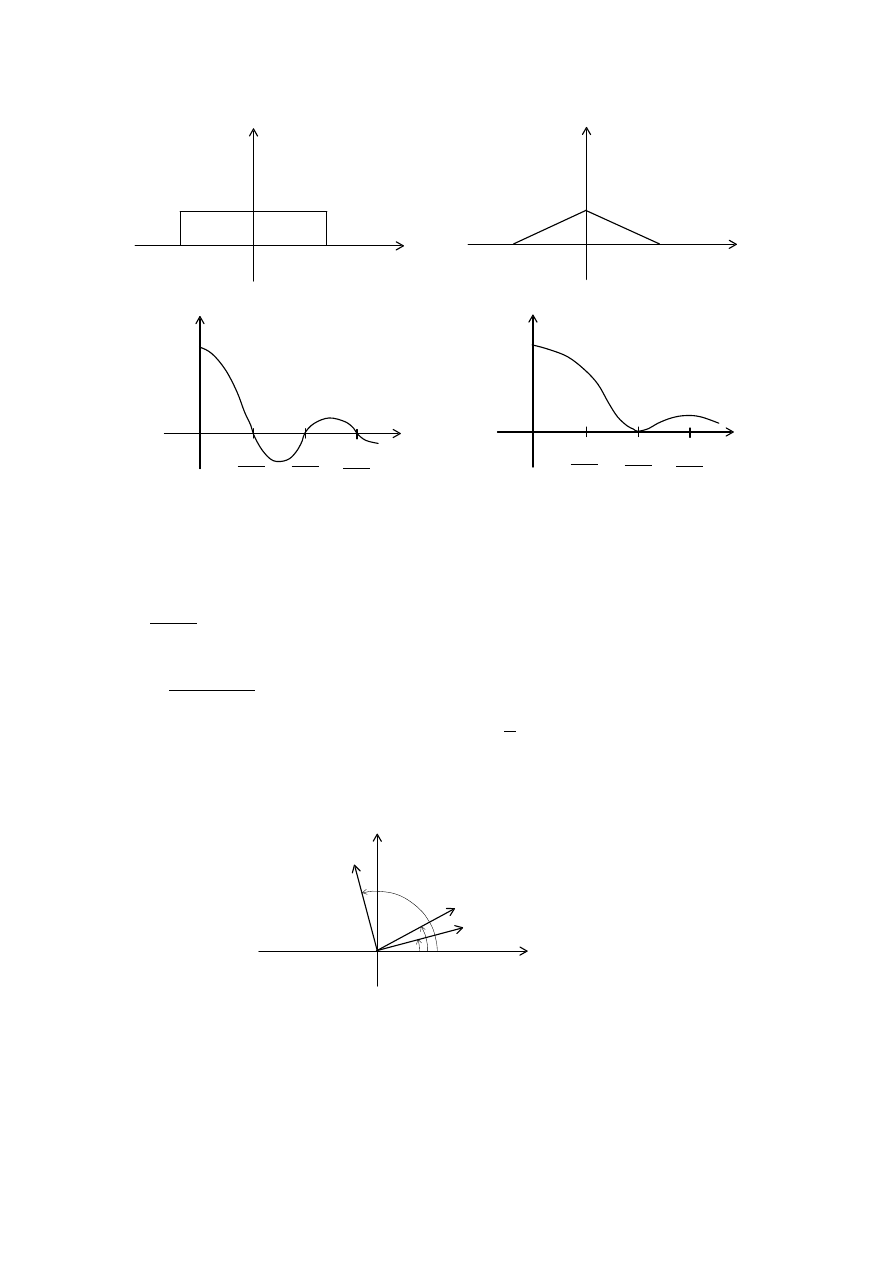
Dla filtrów SOI wprowadza się pojęcie okna filtru, którego długość odpowiada (n+1)
próbkom. Długość okna
i
T
)
1
n
(
w
T
⋅
+
=
. Kształt okna jest obwiednią
współczynników wagowych b
k
.
Przykłady okien i odpowiadających im widm:
5
Ortogonalizacja sygnałów sinusoidalnych
Dany sygnał:
)
t
1
cos(
1
I
)
t
(
i
β
+
⋅
ω
⋅
=
Funkcje ortogonalne:
)
t
1
cos(
1
I
)
t
(
d
i
α
+
⋅
ω
⋅
=
)
t
1
sin(
1
I
)
2
t
1
cos(
1
I
)
t
(
q
i
α
+
⋅
ω
⋅
=
π
−
α
+
⋅
ω
⋅
=
α - dowolny kąt
h
t
0
-T
w
/2
T
w
/2
H
ω
w
T
2
π
w
T
4
π
w
T
6
π
h
t
0
-T
w
/2
T
w
/2
H
ω
w
T
2
π
w
T
4
π
w
T
6
π
i
d
β
i
α
i
q
α-π/2
6
Dyskretne składowe ortogonalne
)
2
i
T
1
h
cos(
2
)
h
n
(
i
)
n
(
i
)
i
T
1
n
cos(
1
I
)
n
(
d
i
⋅
ω
⋅
⋅
−
+
=
α
+
⋅
ω
⋅
⋅
=
)
2
i
T
1
h
cos(
2
)
h
n
(
i
)
n
(
i
)
i
T
1
n
sin(
1
I
)
n
(
q
i
⋅
ω
⋅
⋅
−
−
=
α
+
⋅
ω
⋅
⋅
=
n - kolejna próbka sygnału
h - liczba próbek opóźnienia sygnału
T
i
- okres próbkowania
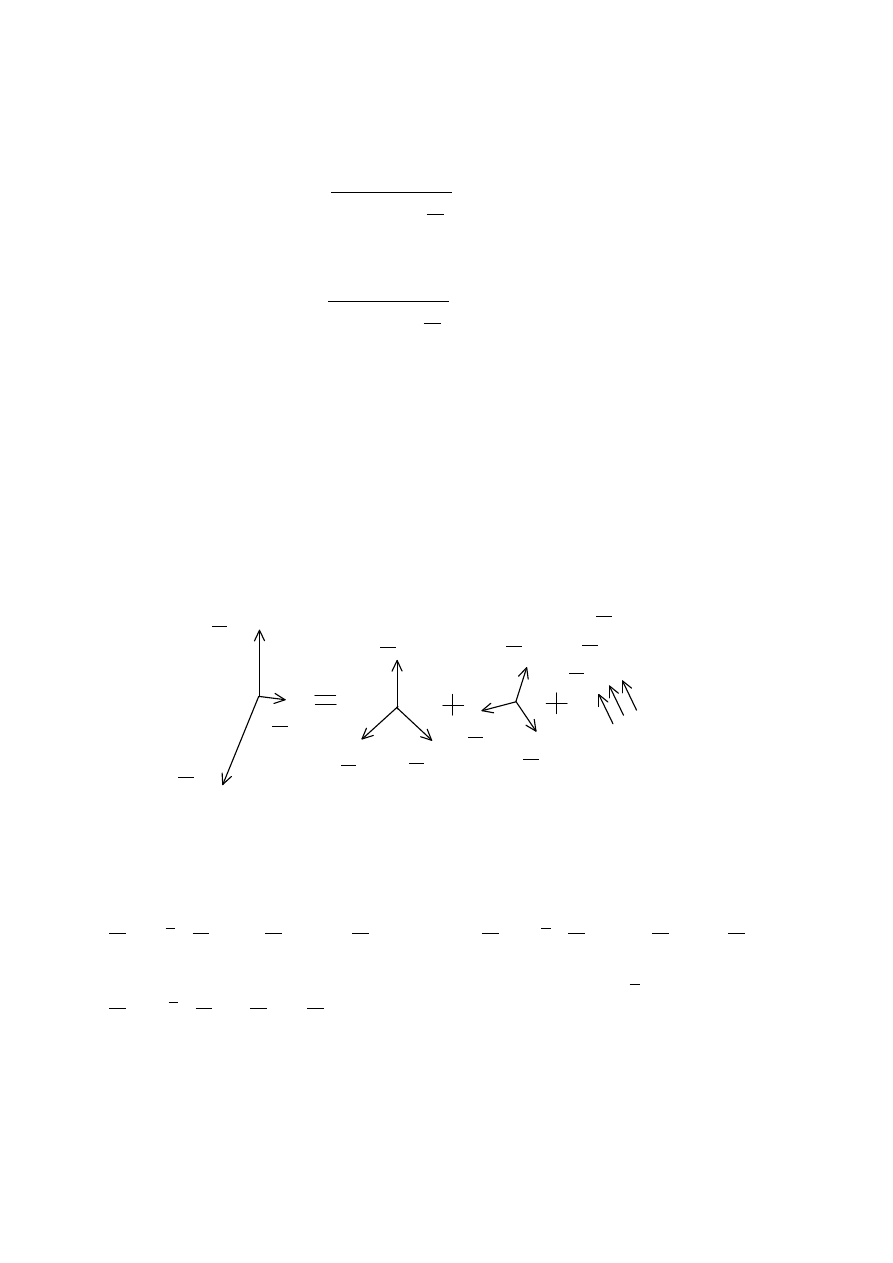
Filtracja składowych symetrycznych
Metoda składowych symetrycznych
Ilustracja
rozkładu niesymetrycznej gwiazdy wielkości fazowych na sumę trzech
układów symetrycznych: kolejności zgodnej, przeciwnej i zerowej
)
3
L
W
2
a
2
L
W
a
1
L
W
(
3
1
)
1
(
1
L
W
⋅
+
⋅
+
⋅
=
;
)
3
L
W
a
2
L
W
2
a
1
L
W
(
3
1
)
2
(
1
L
W
⋅
+
⋅
+
⋅
=
)
3
L
W
2
L
W
1
L
W
(
3
1
)
0
(
1
L
W
+
+
⋅
=
;
π
= 3
2
j
e
a
W
L1
W
L2
W
L3
W
L1
(1
)
W
L2
(1)
W
L3
(1
)
W
L1
(2)
W
L2
(2)
W
L3
(2
)
W
L1
(0)
W
L2
(0)
W
L3
(0)
7
Def.
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
3
L
I
2
L
I
1
L
I
a
2
a
1
2
a
a
1
1
1
1
3
1
)
2
(
I
)
1
(
I
)
0
(
I
;
)
3
2
j
exp(
a
π
⋅
=
Realizacja na próbkach (sposób naturalny):
)
n
(
3
L
i
)
n
(
2
L
i
)
n
(
1
L
i
)
n
(
)
0
(
i
3
+
+
=
⋅
)
3
m
n
(
3
L
i
)
3
m
2
n
(
2
L
i
)
n
(
1
L
i
)
n
(
)
1
(
i
3
−
+
⋅
−
+
=
⋅
)
3
m
2
n
(
3
L
i
)
3
m
n
(
2
L
i
)
n
(
1
L
i
)
n
(
)
2
(
i
3
⋅
−
+
−
+
=
⋅
m - liczba próbek w jednym oknie sinusoidy
Realizacja na próbkach (korzystanie z sygnałów zortogonalizowanych)
)
n
(
d
3
L
i
)
n
(
d
2
L
i
)
n
(
d
1
L
i
)
n
(
)
0
(
i
3
+
+
=
⋅
)
n
(
q
3
L
i
2
3
)
n
(
d
3
L
i
2
1
)
n
(
q
2
L
i
2
3
)
n
(
d
2
L
i
2
1
)
n
(
d
1
L
i
)
n
(
)
1
(
i
3
⋅
+
⋅
−
⋅
−
⋅
+
=
⋅
)
n
(
q
3
L
i
2
3
)
n
(
d
3
L
i
2
1
)
n
(
q
2
L
i
2
3
)
n
(
d
2
L
i
2
1
)
n
(
d
1
L
i
)
n
(
)
2
(
i
3
⋅
−
⋅
−
⋅
−
⋅
−
=
⋅
gdzie: i
L1d
, i
L2d
, i
L3d
, i
L1q
, i
L2q
, i
L3q
- składowe ortogonalne d i q prądów fazowych i
L1
, i
L2
, i
L3
.
Pomiar amplitudy
2
q
i
2
d
i
)
n
(
1
I
+
=
lub
)
h
i
T
1
sin(
)
h
n
(
q
i
)
n
(
d
i
)
n
(
q
i
)
h
n
(
d
i
)
n
(
1
I
⋅
⋅
ω
−
⋅
−
⋅
−
=
8
gdzie:
i
T
1
t
h
=
;
y
1
- dowolne opóźnienie sygnału ortogonalnego
Pomiar mocy czynnej i biernej
Def.:
ϕ
⋅
⋅
⋅
=
cos
1
I
1
U
2
1
P
moc
czynna
ϕ
⋅
⋅
⋅
=
sin
1
I
1
U
2
1
Q
moc
bierna
U
1
, I
1
- amplitudy podstawowych harmonicznych
Realizacja cyfrowa:
Sposób 1
Wykorzystanie składowych ortogonalnych podstawowej harmonicznej prądu i napięcia
)]
n
(
q
i
)
n
(
q
u
)
n
(
d
i
)
n
(
d
u
[
2
1
)
n
(
P
⋅
+
⋅
=
)]
n
(
q
i
)
n
(
d
u
)
n
(
d
i
)
n
(
q
u
[
2
1
)
n
(
Q
⋅
−
⋅
=
Sposób 2
Wykorzystanie składowych ortogonalnych bieżących i opóźnionych podstawowej
harmonicznej prądu i napięcia
)
h
i
T
1
sin(
2
)
h
n
(
q
i
)
n
(
d
u
)
n
(
q
i
)
h
n
(
d
u
)
n
(
P
⋅
⋅
ω
⋅
−
⋅
−
⋅
−
=
)
h
i
T
1
sin(
2
)
n
(
q
i
)
h
n
(
d
u
)
h
n
(
d
i
)
n
(
d
u
)
n
(
Q
⋅
⋅
ω
⋅
⋅
−
−
−
⋅
=
gdzie:
i
T
1
t
h
=
;
t
1
- dowolne opóźnienie
Istnieje wiele algorytmów obliczania mocy czynnej i biernej. Istotne są dwie ważne cechy:
- Odporność na zniekształcenie sygnałów (wyższe harmoniczne, odchylenie od częstotliwości
sieciowej),
9
- Szybkość ustalania się wyniku pomiaru przy nagłej zmianie wartości sygnału (np. po
zwarciu).
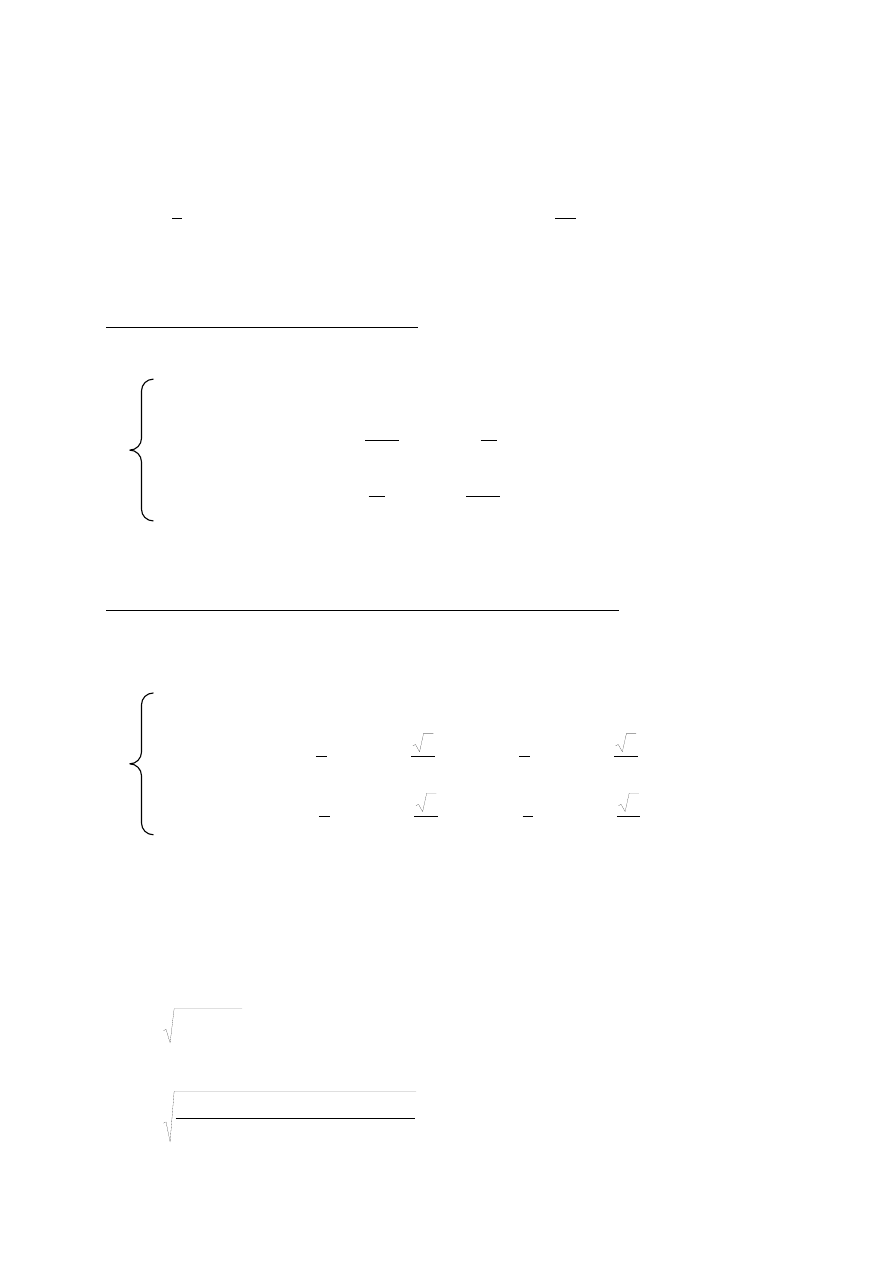
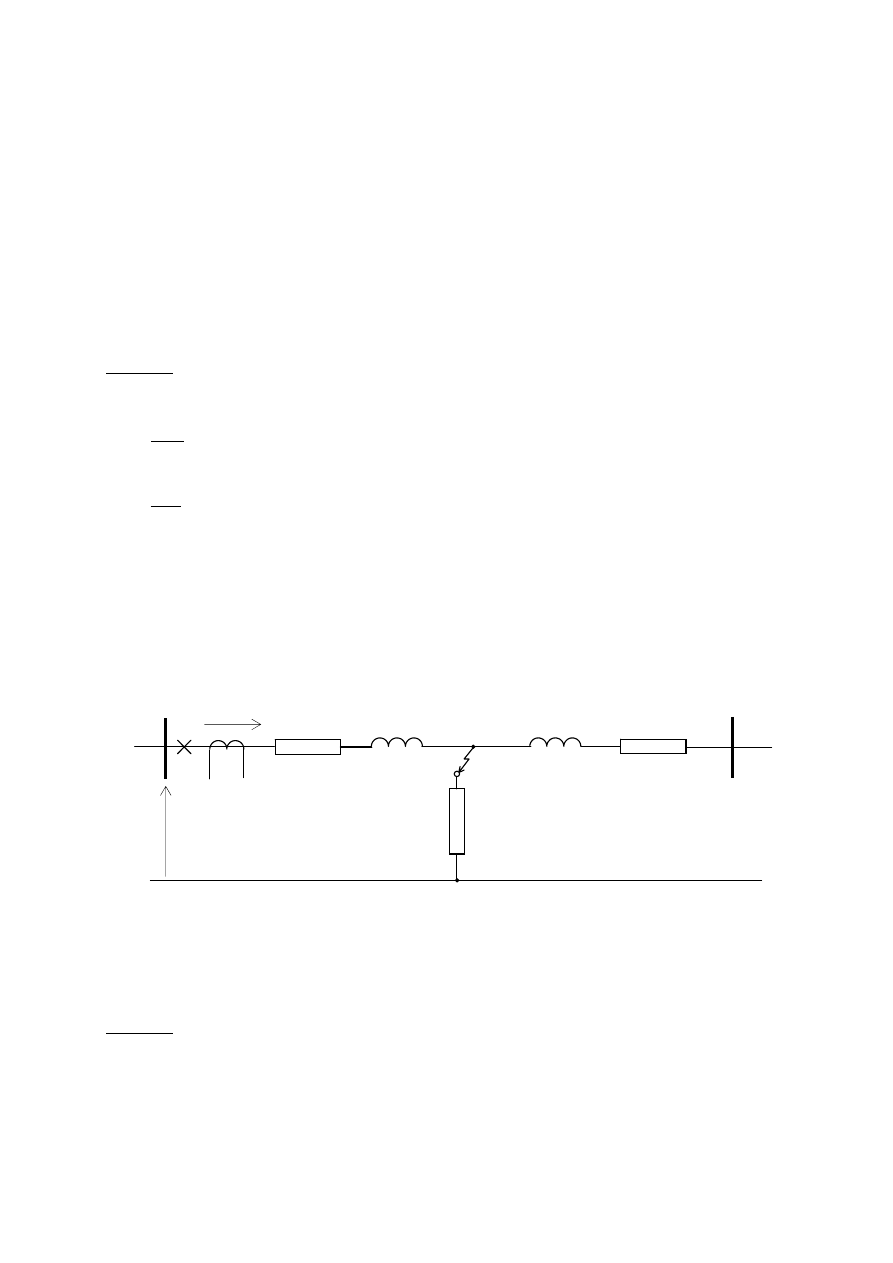
Pomiar rezystancji i reaktancji do miejsca zwarcia
Pomiar rezystancji i reaktancji do miejsca zwarcia w układzie przedstawionym na
rysunku można zrealizować wg zależności:
Sposób 1
2
1
I
Q
2
z
X
⋅
=
2
1
I
P
2
z
R
⋅
=
gdzie: Q i P - fazowe moce czynne i bierne przesyłane od miejsca pomiaru w kierunku
uszkodzenia
I
1
- amplituda prądu płynącego przez uszkodzoną linię.
i
R
z
X
z
X
l
-X
z
R
l
-R
z
R
K
K
u
Rezystancja
przejścia R
K
wprowadza zafałszowanie pomiaru. Także zasilanie
dwustronne miejsca zwarcia wprowadza zafałszowanie.
Sposób 2
Układ jak na rysunku można opisać równaniem:
10
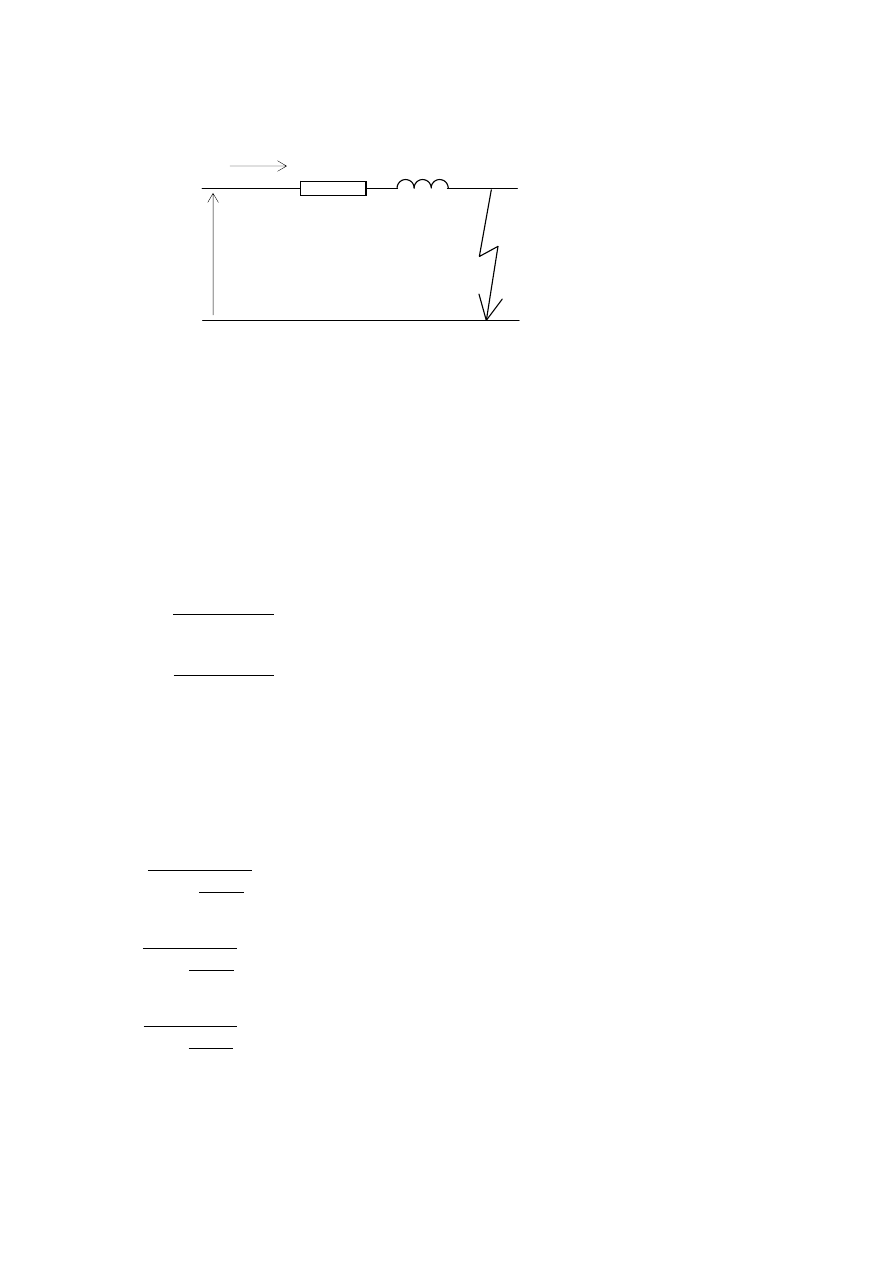
z
L
)
t
(
'i
z
R
)
t
(
i
)
t
(
u
⋅
+
⋅
=
gdzie:
- pierwsza pochodna prądu
)
t
(
'i
Zapisując to równanie dla dwóch chwil: t
1
i t
2
otrzymujemy:
z
L
)
1
t
(
'i
z
R
)
1
t
(
i
)
1
t
(
u
⋅
+
⋅
=
z
L
)
2
t
(
'i
z
R
)
2
t
(
i
)
2
t
(
u
⋅
+
⋅
=
i rozwiązując znajdujemy:
1
'i
2
i
2
'i
1
i
1
'i
2
u
2
'i
1
u
)
n
(
z
R
⋅
−
⋅
⋅
−
⋅
=
1
'i
2
i
2
'i
1
i
2
i
1
u
1
i
2
u
)
n
(
z
X
⋅
−
⋅
⋅
−
⋅
=
gdzie:
- wartości określone w chwili ,
1
'i
,
1
i
,
1
u
1
t
- wartości określone w chwili
.
2
'i
,
2
i
,
2
u
2
t
Wartości te określić można z zależności:
2
i
T
1
cos
2
)
1
n
(
u
)
n
(
u
2
u
⋅
ω
⋅
−
+
=
2
i
T
1
cos
2
)
1
n
(
i
)
n
(
i
2
i
⋅
ω
⋅
−
+
=
2
i
T
1
sin
2
)
1
n
(
i
)
n
(
i
2
'i
⋅
ω
⋅
−
−
=
Podobnie
można określić
z tym, że zamiast próbki (n) należy wstawić próbkę
(n-r), przy czym
.
1
'i
,
1
i
,
1
u
i
T
r
1
t
2
t
⋅
=
−
i
R
z
L
z
u
11

12
Opisany algorytm eliminuje wpływ składowej nieokresowej zawartej w sygnałach na
wynik pomiaru.
[1] Winkler W., Wiszniewski A.: Automatyka zabezpieczeniowa w systemach
elektroenergetycznych. WNT. Warszawa, 1999
[2] Wiszniewski A.: Algorytmy pomiarów cyfrowych w automatyce elektroenergetycznej.
WNT. Warszawa, 1990
[3] Szafran J., Wiszniewski A.: Algorytmy pomiarowe i decyzyjne cyfrowej automatyki
elektroenergetycznej. WNT. Warszawa, 2001
[4] Rosołowski E.: Cyfrowe przetwarzanie sygnałów w automatyce elektroenergetycznej.
Akademicka Oficyna Wydawnicza EXIT, Warszawa, 2002
Wyszukiwarka
Podobne podstrony:
10 Zab cyfrowe
1996 10 26 praid 18571 Nieznany
10 Poslugiwanie sie dokumentacj Nieznany
Cwiczenia nr 10 (z 14) id 98678 Nieznany
Cw 22 Przerzutniki cyfrowe id 1 Nieznany
2008 10 06 praid 26459 Nieznany
10 zaburzenia organiczneid 1121 Nieznany
10 Sprawdzenie Konstrukcji Ze W Nieznany (2)
mat bud cwicz 10 11 id 282450 Nieznany
Cw 5 10 Analiza tolerancji i od Nieznany
10 1 1 83 2318id 10401 Nieznany
10 Sporzadzanie i ekspedycja wy Nieznany (2)
analiza swot (10 stron) id 6157 Nieznany
10 Rownanie Naviera Stokesaid 1 Nieznany (2)
Angielski 4 10 2013 id 63977 Nieznany
10 PZ organizowanieid 11066 Nieznany (2)
10 Veritatis Splendorid 10646 Nieznany
więcej podobnych podstron