10
W
iesz ju˝, jak dzia∏a oprogramowanie I-Droid01 PC
Control, dzi´ki któremu, wykorzystujàc odpo-
wiedni interfejs graficzny, mo˝na sterowaç robo-
tem z komputera. W taki sam sposób mo˝na sterowaç ro-
botem, pos∏ugujàc si´ kompatybilnym telefonem komórko-
wym. S∏u˝y do tego oprogramowanie I-Droid01 Mobile Con-
trol. W numerze 42 opisaliÊmy, jak przeprowadziç po∏àcze-
nie mi´dzy telefonem a robotem, szczegó∏owo ilustrujàc
wszystkie niezb´dne czynnoÊci. Teraz natomiast przyjrzymy
si´, jakimi funkcjami robota mo˝na sterowaç z telefonu.
Opis tych funkcji znajdziesz równie˝ w przewodniku za-
mieszczonym na pierwszej p∏ycie CD.
MENU G¸ÓWNE
Komendy z menu g∏ównego I-Droid Mobile Control opisy-
wane by∏y ju˝ w poprzednich numerach. Dzi´ki komendzie
„Po∏àcz” mo˝na na ostatnim skonfigurowanym robocie uru-
chomiç procedur´ automatycznego ∏àczenia. Jest to oczy-
wiÊcie mo˝liwe tylko wtedy, gdy konfiguracja taka mia∏a
miejsce w przesz∏oÊci. Komenda „Ustaw” pozwala z kolei usta-
wiç parametry po∏àczenia z i-D01, tak jak opisaliÊmy to
w numerze 42 oraz w przewodniku na p∏ycie CD. Wybiera-
jàc „Pomoc” uzyskasz dost´p do krótkiego przewodnika po
komendach u˝ytecznych przy sterowaniu robotem. Po na-
ciÊni´ciu „WyjÊcie” program si´ zamyka.
MENU ROBOT
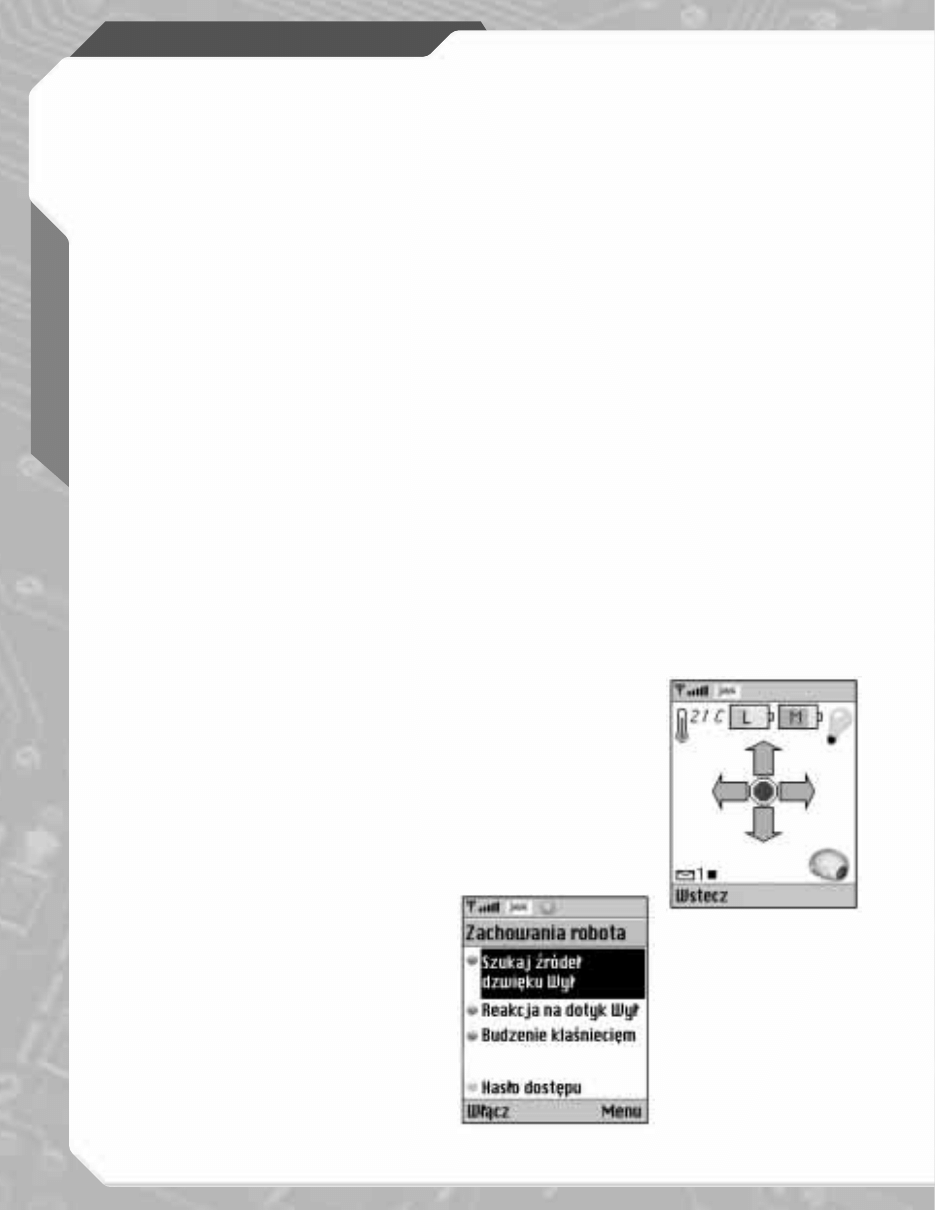
Kiedy nawià˝emy po∏àczenie, poka˝e si´ nowe menu
umo˝liwiajàce sterowanie kilkoma podstawowymi
funkcjami oprogramowania. Wybierajàc komend´
„Zdalne sterowanie” , b´dzie mo˝na przejÊç do pod-
stawowego interfejsu do sterowania i-D01, skàd mo˝-
na sterowaç g∏owà i podstawà robota. Wybranie opcji
„Zachowania robota” umo˝liwi dost´p do zarzàdza-
nia zachowaniami i-D01. Mo˝na je aktywowaç lub
dezaktywowaç w sposób podobny do tego, jak mia-
∏o to miejsce przy oprogramowaniu kontrolnym na PC.
W szczególnoÊci jest mo˝liwe:
• aktywowanie i dezaktywowanie funkcji „szukaj
êróde∏ dêwi´ku”;
OPROGRAMOWANIE
KROK PO KROKU
W
W p
po
op
prrzze
ed
dn
niim
m n
nu
um
me
errzze
e p
po
ok
ka
azza
alliiÊÊm
my
y,, jja
ak
k p
po
oss∏∏u
ug
giiw
wa
açç ssii´
´ o
op
prro
og
grra
am
mo
ow
wa
an
niie
em
m d
do
o sstte
erro
ow
wa
an
niia
a
rro
ob
bo
otte
em
m p
prrzze
ezz k
ko
om
mp
pu
utte
err.. T
Te
erra
azz n
na
ad
dsszze
ed
d∏∏ cczza
ass,, b
by
y p
prrzzy
yjjrrzze
eçç ssii´
´ m
mo
o˝˝lliiw
wo
oÊÊcciio
om
m,, jja
ak
kiie
e o
offe
erru
ujje
e
o
op
prro
og
grra
am
mo
ow
wa
an
niie
e n
na
a tte
elle
effo
on
n k
ko
om
mó
órrk
ko
ow
wy
y,, cczzy
yllii II--D
Drro
oiid
d0
01
1 M
Mo
ob
biille
e C
Co
on
nttrro
oll..
• w∏àczenie i wy∏àczenie reagowania na dotyk;
• wybranie sposobu budzenia w trybie uÊpienia – gwizd
lub klaÊni´cia w d∏onie;
• aktywowanie i dezaktywowanie g∏osowego has∏a dost´pu.
Wybranie opcji „Pomoc” sprawi z kolei, ˝e na ekranie poja-
wi si´ krótki przewodnik po funkcjach interfejsu „Zdalne
sterowanie”. Komenda „Roz∏àcz” sprawi, ˝e od∏àczymy i-D01
i wrócimy do menu g∏ównego.
STEROWANIE RADIOWE
Kiedy uruchomimy interfejs „Zdalne sterowanie”, zobaczy-
my tryb „Pe∏ny ekran”. Mo˝na go w∏àczyç, przytrzymujàc
przez pó∏ sekundy klawisz numeryczny 0. Na ekranie b´dzie
widaç ró˝ne ikony obrazujàce stan robota. Sà to przede
wszystkim: temperatura (ta opcja b´dzie dost´pna po zain-
stalowaniu modu∏u ramion i odpowiedniego czujnika),
Dwa widoki ekranu
oprogramowania
kontrolnego na telefon
komórkowy. Powy˝ej:
interfejs „Zdalne
sterowanie”, pokazany
w trybie „sterowanie
g∏owà”, gdy robot stoi,
po lewej – menu
„Zachowania robota”.
Dzi´ki niemu mo˝na
sterowaç niektórymi
ogólnymi funkcjami i-D01.
STEROWANIE I-D01
ZA POMOCA TELEFONU
STEROWANIE i-D0
1
ZA POMOCÑ TELEFONU
S
ST
TE
ER
RO
OW
WA
AN
NIIE
E ii--D
D0
01
1 Z
ZA
A P
PO
OM
MO
OC
CÑ
Ñ T
TE
EL
LE
EF
FO
ON
NU
U
poziom na∏adowania baterii zasilania systemu elektronicz-
nego (L) i silników (M), stan Êwiate∏ pozycyjnych, a na do-
le ekranu – ikona aktualnie wybranej wiadomoÊci, wskaê-
nik, jakà ostatnio komend´ wykonano na wiadomoÊciach (na-
granie, odtwarzanie, stop) i wskaênik rodzaju sterowania (je-
Êli si´ Êwieci, steruje si´ g∏owà, jeÊli ma kolor szary – pod-
stawà robota). Aby przejÊç od sterowania g∏owà do stero-
wania podstawà robota lub odwrotnie, wystarczy krótko
wcisnàç klawisz 0 na klawiaturze numerycznej. Po Êrodku ekra-
nu widaç cztery strza∏ki, ustawione jak w ró˝y wiatrów, ty-
le ˝e mi´dzy nimi znajduje si´ oÊmiokàt. Strza∏ki te wskazu-
jà kierunki ruchów, jakie w danej chwili wykonuje robot.
* Na razie funkcja ta nie jest dost´pna z powodu braku fragmentów lub ca∏oÊci odpowiednich modu∏ów.
11
STEROWANIE G¸OWÑ
STEROWANIE PODSTAWÑ*
DO GÓRY
W DÓ¸
W PRAWO
W LEWO
ÂRODKOWY
PRZYCISK
1
4
7
*
2
5
8
3
6
9
#
0
G∏owa w´druje do góry, do po∏owy
ca∏kowitego mo˝liwego wychylenia
(lub do kompletnego wychylenia
przy d∏ugim wciskaniu joysticka)
G∏owa w´druje w dó∏, do po∏owy
ca∏kowitego mo˝liwego wychylenia
(lub do kompletnego wychylenia
przy d∏ugim wciskaniu joysticka)
G∏owa obraca si´ w prawo, do jednej
czwartej ca∏kowitego mo˝liwego skr´tu
(lub do po∏owy przy d∏ugim wciskaniu
joysticka)
G∏owa obraca si´ w lewo, do jednej
czwartej ca∏kowitego mo˝liwego skr´tu
(lub do po∏owy przy d∏ugim wciskaniu
joysticka)
(W NIEKTÓRYCH MODELACH MA ON
KOLOR ZIELONY)
Informacja
o temperaturze* (lub zrobienie zdj´cia
przy d∏ugim wciskaniu klawisza)
W∏àczenie/Wy∏àczenie zielonych diod
w lewym oku
W∏àczenie/Wy∏àczenie ˝ó∏tych diod
w lewym oku
W∏àczenie/Wy∏àczenie czerwonych diod
w lewym oku
W∏àczenie/Wy∏àczenie diod w lewym
uchu
Kolejna wiadomoÊç (lub nagranie
wybranej wiadomoÊci przy d∏ugim
wciskaniu klawisza; wiadomoÊç mo˝e
trwaç najwy˝ej 16 sekund. JeÊli
wiadomoÊç ju˝ istnieje, trzeba najpierw
jà skasowaç)
Zatrzymanie nagrywania/odtwarzania
(usuni´cie wybranej wiadomoÊci
przy d∏ugim wciskaniu klawisza)
Poprzednia wiadomoÊç (lub odtwarzanie
wybranej wiadomoÊci przy d∏ugim
wciskaniu klawisza)
W∏àczenie/Wy∏àczenie zielonych diod
w prawym oku
W∏àczenie/Wy∏àczenie ˝ó∏tych diod
w prawym oku
W∏àczenie/Wy∏àczenie czerwonych diod
w prawym oku
W∏àczenie/Wy∏àczenie diod w prawym
uchu
PrzejÊcie do sterowania podstawà
robota
ODPOWIEDZI NA RUCHY JOYSTICKA
ODPOWIEDZI NA RUCHY JOYSTICKA
DO GÓRY
W DÓ¸
W PRAWO
(gdy robot stoi)
W PRAWO
(gdy robot
jest w ruchu)
W LEWO
(gdy robot stoi)
W LEWO
(gdy robot
jest w ruchu)
ÂRODKOWY
PRZYCISK
1
4
7
*
2
5
8
3
6
9
#
0
Powolny ruch do przodu (lub szybki
przy d∏ugim wciskaniu joysticka)
Powolny ruch wstecz (lub szybki
przy d∏ugim wciskaniu joysticka)
Obrót o 90 stopni w prawo
(lub obrót a˝ do us∏yszenia
komendy „stop” przy d∏ugim
wciskaniu joysticka)
Powolny obrót w prawo (lub szybki
przy d∏ugim wciskaniu joysticka)
Obrót o 90 stopni w lewo (lub obrót
a˝ do us∏yszenia komendy „stop”
przy d∏ugim wciskaniu joysticka)
Powolny obrót w lewo (lub szybki
przy d∏ugim wciskaniu joysticka
(W NIEKTÓRYCH MODELACH MA ON
KOLOR ZIELONY)
Zatrzymanie ruchu
Lewe rami´ do góry
Zatrzymanie ruchu lewego ramienia
Lewe rami´ w dó∏
W∏àczenie/wy∏àczenie narz´dzia
lewego ramienia
Korpus w gór´
W∏àczenie/wy∏àczenie Êwiate∏
pozycyjnych
Korpus w dó∏
Prawe rami´ do góry
Zatrzymanie ruchu prawego
ramienia
Prawe rami´ w dó∏
W∏àczenie/wy∏àczenie narz´dzia
prawego ramienia
PrzejÊcie do sterowania g∏owà
ODPOWIEDZI NA WCIÂNI¢CIE KLAWIATURY
NUMERYCZNEJ
ODPOWIEDZI NA WCIÂNI¢CIE KLAWIATURY
NUMERYCZNEJ
12
KROK PO KROKU
P
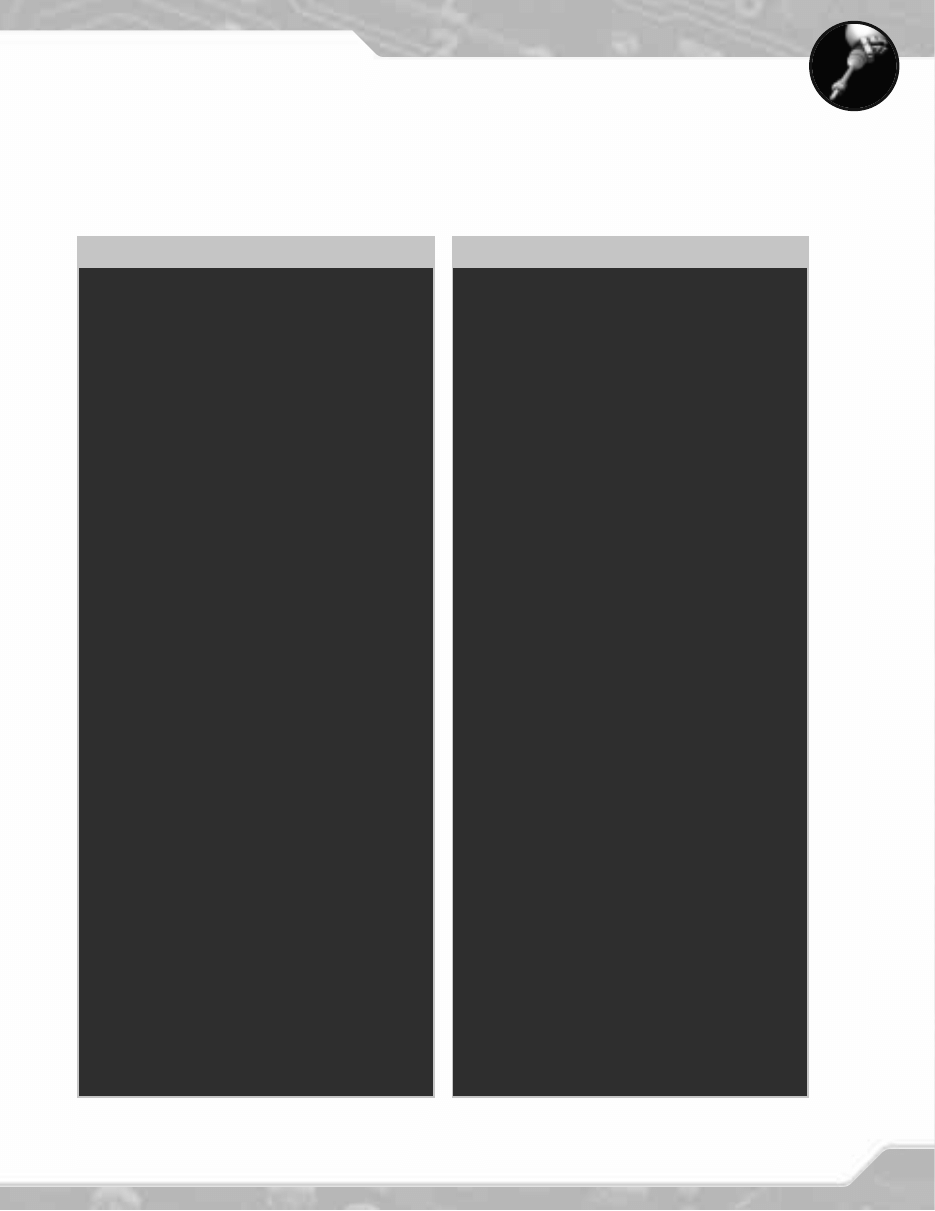
odczas tego nowego etapu monta˝u zwanego „Uk∏ad ruchu i modu∏ mózgu i wzroku”
oprócz instalacji modu∏u mózgu i wzroku post´powaç te˝ b´dzie monta˝ podstawy ro-
bota z uk∏adem nap´dowym. Do∏àczony do tego numeru element stanowi w∏aÊnie
cz´Êç uk∏adu ruchu, a dok∏adniej – sk∏ada si´ na lewà cz´Êç wspornika tylnego ko∏a i-D01. Jak
ju˝ zauwa˝y∏eÊ, cz´Êç ta jest bardzo podobna do do∏àczonej do numeru 34 prawej cz´Êci te-
go samego wspornika. Te dwie cz´Êci b´dà tworzyç rodzaj „tylnej nogi” robota, która pozwo-
li mu utrzymywaç równowag´. Wspornik tylnego ko∏a b´dzie te˝ punktem oparcia dla me-
chanizmu ruchu korpusu w gór´ i w dó∏. Na razie od∏ó˝ t´ cz´Êç na bok, ju˝ niebawem przyj-
dzie pora na jej zamontowanie.
W
W tty
ym
m n
nu
um
me
errzze
e zzn
na
ajjd
dzziie
esszz k
ko
olle
ejjn
nà
à cczz´
´ÊÊçç ssk
k∏∏a
ad
do
ow
wà
à u
uk
k∏∏a
ad
du
u rru
ucch
hu
u
rro
ob
bo
otta
a,, cczzy
yllii p
po
od
dsstta
aw
wy
y,, n
na
a k
kttó
órre
ejj b
b´
´d
dzziie
e o
op
piie
erra
a∏∏ ssii´
´ ii--D
D0
01
1..
B
B´
´d
dzziie
e tto
o d
drru
ug
ga
a cczz´
´ÊÊçç w
wssp
po
orrn
niik
ka
a tty
ylln
ne
eg
go
o k
ko
o∏∏a
a..
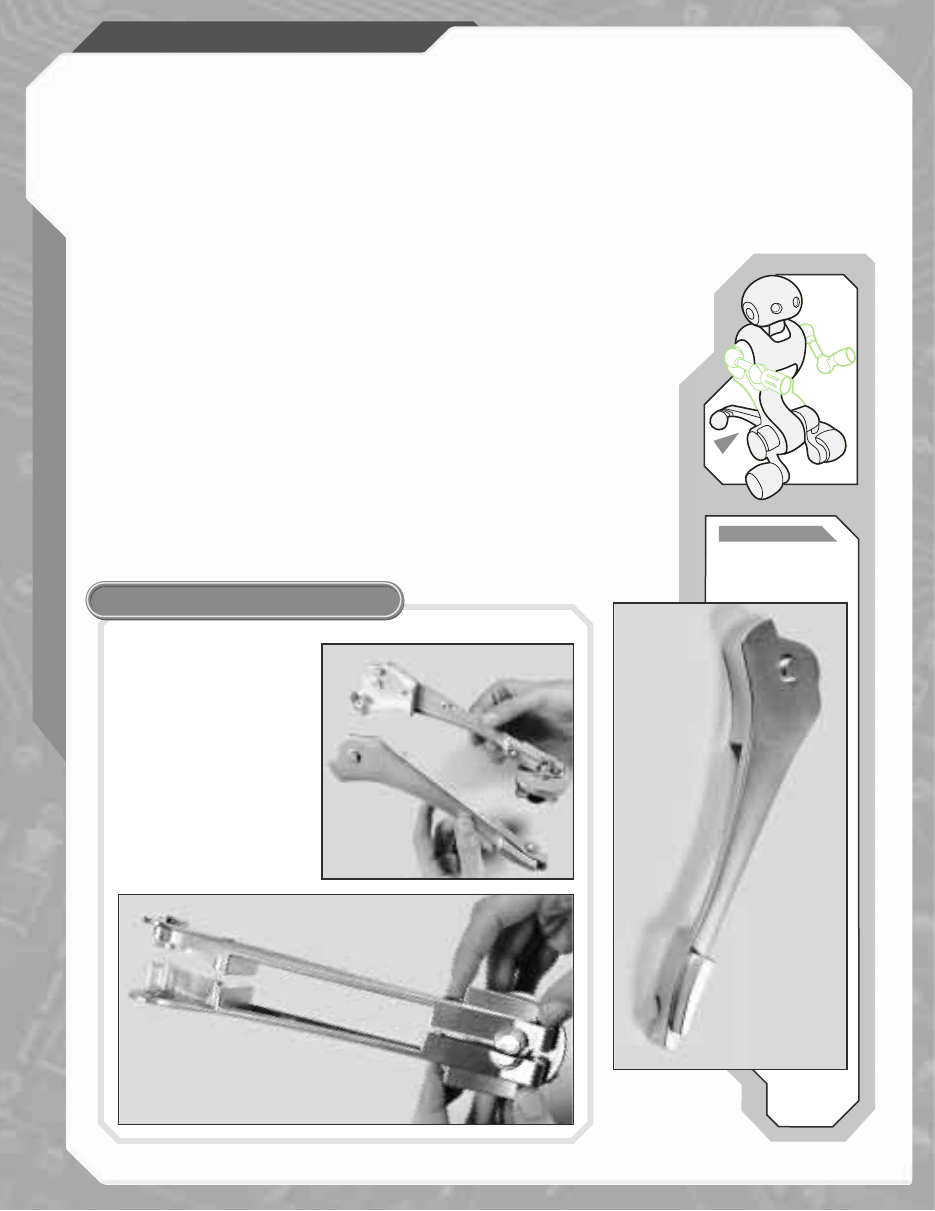
1. lewa cz´Êç wspornika
tylnego ko∏a
KOMPONENTY
1.
UK¸AD RUCHU I MODU¸ MÓZGU I WZROKU, CZ¢Âå 2
Tak jak w poprzednim
numerze mo˝esz ju˝ dziÊ
wypróbowaç do∏àczony
element. Powinien on
pasowaç do prawej cz´Êci
wspornika tylnego ko∏a
do∏àczonej do numeru 34.
UmieÊç tylne ko∏o
we w∏aÊciwym miejscu
na prawej cz´Êci wspornika
(zdj´cie po prawej),
a nast´pnie z∏ó˝ obie po∏owy
wspornika (poni˝ej)
– powinny dobrze do siebie
pasowaç i bez problemu
sk∏adaç si´ ze sobà.
WSKAZÓWKI
LEWA CZESC WSPORNIKA
TYLNEGO KOLA
LEWA CZ¢Âå WSPORNIKA
TYLNEGO KO¸A
Wyszukiwarka
Podobne podstrony:
i droid instrukcja87a
i droid instrukcja75
i droid instrukcja35
i droid instrukcja85a
i droid instrukcja43
i droid instrukcja82a
i droid instrukcja83b
i droid instrukcja87b
i droid instrukcja88b
i droid instrukcja81a
i droid instrukcja84a
i droid instrukcja82c
i droid instrukcja66
i droid instrukcja87a
i droid instrukcja88a
więcej podobnych podstron