10
D
zi´ki modu∏owi Bluetooth, który za-
instalowa∏eÊ zgodnie ze wskazówka-
mi z poprzedniego numeru, robot
mo˝e teraz komunikowaç si´ z telefonem
komórkowym i komputerem PC pod warun-
kiem, ˝e sà one kompatybilne i wyposa˝o-
ne w modu∏ Bluetooth. OpisaliÊmy ju˝ pro-
cedur´ niezb´dnà do pod∏àczenia i-D01 do
telefonu komórkowego i komputera, teraz
przysz∏a pora, by pomówiç o ró˝nych funk-
cjach dost´pnych dzi´ki oprogramowaniu
sterujàcemu przez komputer. Mo˝liwoÊci
oprogramowania dla telefonu komórkowe-
go poznamy w kolejnym numerze. Funkcje
oprogramowania sterujàcego opisane sà tak-
˝e w przewodniku znajdujàcym si´ na pierw-
szej p∏ycie CD.
MENU PODSTAWOWE
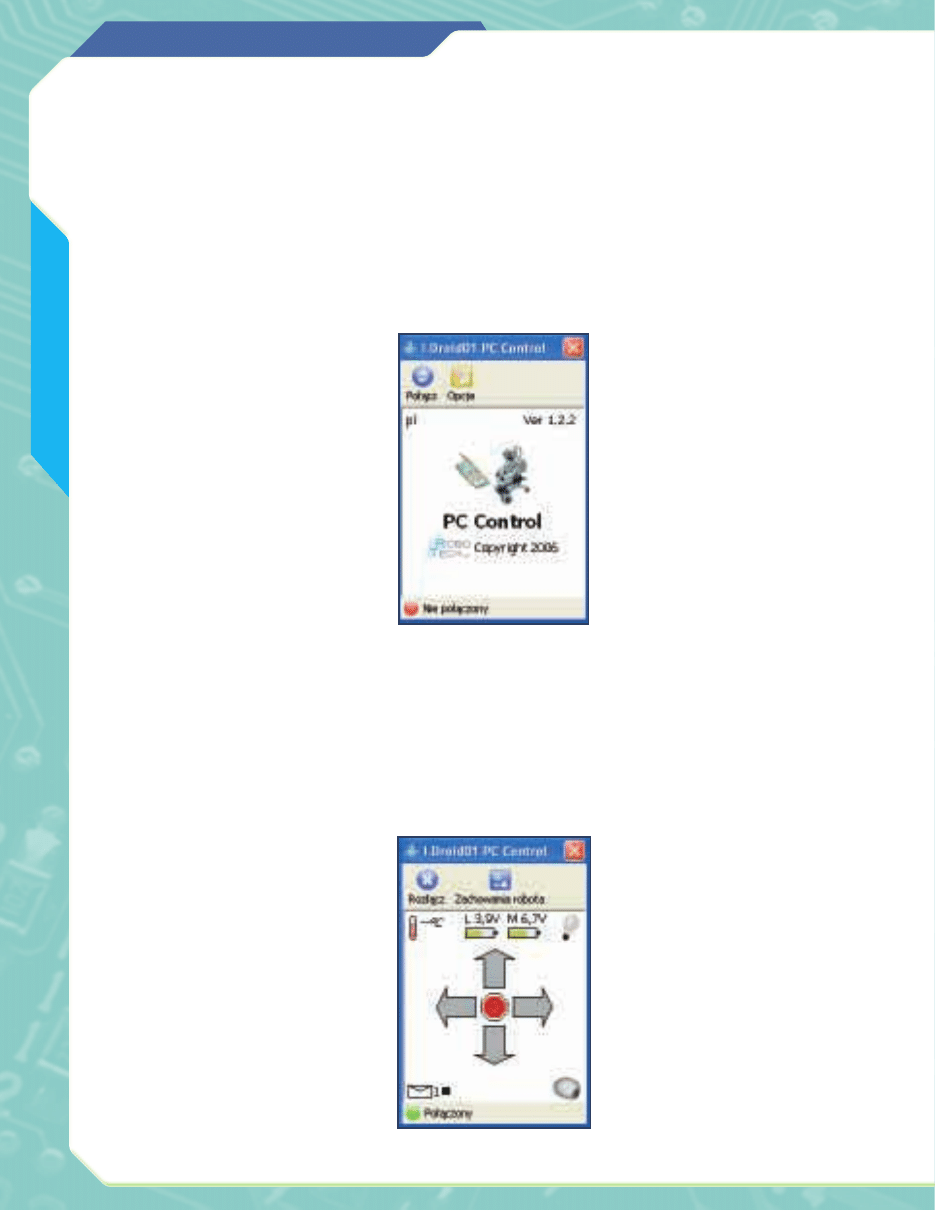
Jak mówiliÊmy w poprzednim numerze, na
poczàtkowym ekranie oprogramowania zdal-
nego sterowania przez PC (i-Droid01 PC Con-
trol) widaç dwa przyciski („Po∏àcz” i „Opcje”)
oraz pasek na dole ekranu, na którym wi-
daç, czy oprogramowanie jest pod∏àczone
do robota, czy nie. Przycisk „Po∏àcz” rozpo-
czyna komunikacj´ mi´dzy PC a i-D01, zaÊ
przycisk „Opcje” otwiera kolejne okno, w któ-
rym mo˝na ustawiç parametry po∏àczenia.
Gdy ju˝ si´ je ustawi (jak opisano to w po-
przednim numerze), mo˝na rozpoczàç po∏à-
czenie. Kiedy proces ten si´ zakoƒczy, zoba-
czymy podstawowy interfejs kontrolny.
INTERFEJS
Równie˝ na tym interfejsie b´dà dwa przyci-
ski („Roz∏àcz” i „Zachowania”) oraz pasek
stanu (taki sam jak na ekranie poczàtkowym).
Przycisk „Roz∏àcz” pozwala od∏àczyç opro-
gramowanie od robota i wróciç do ekranu po-
OPROGRAMOWANIE
KROK PO KROKU
W
W p
po
op
prrzze
ed
dn
niim
m n
nu
um
me
errzze
e m
miia
a∏∏e
eÊÊ o
ok
ka
azzjj´
´ p
prrzze
ette
esstto
ow
wa
açç d
dzziia
a∏∏a
an
niie
e m
mo
od
du
u∏∏u
u B
Bllu
ue
etto
oo
otth
h
p
prrzze
ezz k
ko
om
mp
pu
utte
err P
PC
C.. D
DzziiÊÊ b
ba
arrd
dzziie
ejj sszzcczze
eg
gó
ó∏∏o
ow
wo
o p
prrzzy
yjjrrzzy
ym
my
y ssii´
´ ffu
un
nk
kccjjo
om
m k
ko
om
mp
pu
utte
erro
ow
we
eg
go
o
o
op
prro
og
grra
am
mo
ow
wa
an
niia
a sstte
erru
ujjà
àcce
eg
go
o..
czàtkowego. Z kolei naciÊni´cie przycisku „Za-
chowania” sprawi, ˝e otworzy si´ nowe me-
nu, z którego b´dzie mo˝na sterowaç niektó-
rymi funkcjami podstawowymi robota. B´dzie
mo˝na:
• w∏àczaç i wy∏àczaç komend´ „idê za dêwi´-
kiem”;
• aktywowaç i dezaktywowaç reakcj´ robo-
ta na dotkni´cie g∏owy;
• decydowaç, czy chcemy obudziç robota
pozostajàcego w trybie uÊpienia za pomocà
gwizdu czy klaÊni´cia w d∏onie;
• aktywowaç i dezaktywowaç ustawione
wczeÊniej g∏osowe has∏o dost´pu.
Kiedy rozpoczyna si´ po∏àczenie, oprogra-
mowanie kontrolne pokazuje, które zacho-
wania sà w danym momencie aktywne. Na
przyk∏ad, kiedy rozpoczyna si´ po∏àczenie
natychmiast po w∏àczeniu robota, nie mo˝-
na wybraç zachowania „idê za dêwi´kiem”.
Gdyby chcia∏o si´ je aktywowaç, mo˝na to
zrobiç, klikajàc odpowiedni g∏os z menu „Za-
chowania” (chyba, ˝e wybierzemy wydanie
robotowi bezpoÊredniej komendy g∏osowej).
Przejdêmy teraz do centralnej cz´Êci inter-
fejsu. Widaç na niej ró˝ne ikony. U góry
znajduje si´ wskaênik temperatury (który
b´dzie aktywny, gdy zostanie zainstalowa-
ny odpowiedni czujnik w ciele i-D01), wskaê-
nik napi´cia, jakie baterie dostarczajà elek-
tronice robota (oznaczone literà „L”, jak lo-
gika) i silnikom („M” jak motory). Jest te˝
wskaênik stanu Êwiate∏ pozycyjnych (na ra-
zie jeszcze nie u˝ywanych). Z kolei ikony
umieszczone tu˝ nad paskiem stanu, w dol-
nej cz´Êci ekranu, wskazujà numer wybra-
nej aktualnie wiadomoÊci g∏osowej, wskaê-
nik, jakà ostatnio komend´ wykonano na
wiadomoÊciach (nagranie, odtwarzanie,
stop) i w koƒcu, w prawym dolnym rogu –
Dwa widoki ekranu
oprogramowania kontrolnego
na PC (I-Droid PC Control).
Powy˝ej: ekran poczàtkowy
z podstawowym menu,
poni˝ej – interfejs kontrolny
(pokazywany w momencie
sterowania podstawà robota).
Interfejs zawiera ró˝nego
rodzaju wskaêniki dotyczàce
stanu robota i wykonywanych
przez niego ruchów.
STEROWANIE
PRZEZ KOMPUTER
STEROWANIE
PRZEZ KOMPUTER
S
ST
TE
ER
RO
OW
WA
AN
NIIE
E P
PR
RZ
ZE
EZ
Z K
KO
OM
MP
PU
UT
TE
ER
R
wskaênik sterowania g∏owà. JeÊli ma kolor szary, oznacza
to, ˝e w danej chwili steruje si´ podstawà robota (na razie
ta funkcja w naszym i-D01 nie jest jeszcze dost´pna), kolor
niebieski oznacza natomiast, ˝e g∏owa jest „w∏àczona” i w∏a-
Ênie nià sterujemy. By przejÊç od sterowania podstawà do ste-
rowania g∏owà, wystarczy wcisnàç klawisz 0 (zero) na kla-
wiaturze numerycznej komputera. PoÊrodku ekranu widaç czte-
ry strza∏ki, ustawione jak na ró˝y wiatrów, tyle ˝e mi´dzy ni-
mi znajduje si´ oÊmiokàt. Strza∏ki te wskazujà kierunki ruchów,
jakie w danej chwili wykonuje robot.
* Na razie funkcja ta nie jest dost´pna z powodu braku fragmentów lub ca∏oÊci odpowiednich modu∏ów.
11
STEROWANIE G¸OWÑ
STEROWANIE PODSTAWÑ*
DO GÓRY
W DÓ¸
W PRAWO
W LEWO
SPACJA
7
4
1
/
8
5
2
9
6
3
*
0
G∏owa w´druje do góry, do po∏owy
ca∏kowitego mo˝liwego wychylenia
(lub do kompletnego wychylenia
przy d∏ugim wciskaniu klawisza)
G∏owa w´druje w dó∏, do po∏owy
ca∏kowitego mo˝liwego wychylenia
(lub do kompletnego wychylenia
przy d∏ugim wciskaniu klawisza)
G∏owa obraca si´ w prawo, do jednej
czwartej ca∏kowitego mo˝liwego
skr´tu (lub do po∏owy przy d∏ugim
wciskaniu klawisza)
G∏owa obraca si´ w lewo, do jednej
czwartej ca∏kowitego mo˝liwego
skr´tu (lub do po∏owy przy d∏ugim
wciskaniu klawisza)
Informacja o temperaturze*
(lub zrobienie zdj´cia przy d∏ugim
wciskaniu klawisza)
W∏àczenie/Wy∏àczenie zielonych diod
w lewym oku
W∏àczenie/Wy∏àczenie ˝ó∏tych diod
w lewym oku
W∏àczenie/Wy∏àczenie czerwonych
diod w lewym oku
W∏àczenie/Wy∏àczenie diod w lewym
uchu
Kolejna wiadomoÊç (lub nagranie
wybranej wiadomoÊci przy d∏ugim
wciskaniu klawisza; wiadomoÊç mo˝e
trwaç najwy˝ej 16 sekund; jeÊli
wiadomoÊç ju˝ istnieje, trzeba
najpierw jà skasowaç)
Zatrzymanie nagrywania/odtwarzania
(usuni´cie wybranej wiadomoÊci
przy d∏ugim wciskaniu klawisza)
Poprzednia wiadomoÊç (lub
odtwarzanie wybranej wiadomoÊci
przy d∏ugim wciskaniu klawisza)
W∏àczenie/Wy∏àczenie zielonych diod
w prawym oku
W∏àczenie/Wy∏àczenie ˝ó∏tych diod
w prawym oku
W∏àczenie/Wy∏àczenie czerwonych
diod w prawym oku
W∏àczenie/Wy∏àczenie diod w prawym
uchu
PrzejÊcie do sterowania podstawà
robota
ODPOWIEDZI NA WCIÂNI¢CIE STRZA¸KI
I KLAWISZA SPACJI
ODPOWIEDZI NA WCIÂNI¢CIE STRZA¸KI
I KLAWISZA SPACJI
DO GÓRY
W DÓ¸
W PRAWO
(gdy robot stoi)
W PRAWO
(gdy robot
jest w ruchu)
W LEWO
(gdy robot stoi)
W LEWO
(gdy robot
jest w ruchu)
SPACJA
7
4
1
/
8
5
2
9
6
3
*
0
Powolny ruch do przodu
(lub szybki przy d∏ugim wciskaniu
klawisza)
Powolny ruch wstecz (lub szybki
przy d∏ugim wciskaniu klawisza)
Obrót o 90 stopni w prawo
(lub obrót a˝ do wydania
komendy stop przy d∏ugim
wciskaniu klawisza)
Powolny obrót w prawo
(lub szybki przy d∏ugim wciskaniu
klawisza)
Obrót o 90 stopni w lewo
(lub obrót a˝ do wydania
komendy stop przy d∏ugim
wciskaniu klawisza)
Powolny obrót w lewo
(lub szybki przy d∏ugim wciskaniu
klawisza)
Zatrzymanie ruchu (stop)
Lewe rami´ do góry
Zatrzymanie ruchu lewego
ramienia
Lewe rami´ w dó∏
W∏àczenie/wy∏àczenie narz´dzia
lewego ramienia
Korpus w gór´
W∏àczenie/wy∏àczenie Êwiate∏
pozycyjnych
Korpus w dó∏
Prawe rami´ do góry
Zatrzymanie ruchu prawego
ramienia
Prawe rami´ w dó∏
W∏àczenie/wy∏àczenie narz´dzia
prawego ramienia
PrzejÊcie do sterowania g∏owà
ODPOWIEDZI NA WCIÂNI¢CIE KLAWIATURY
NUMERYCZNEJ
ODPOWIEDZI NA WCIÂNI¢CIE KLAWIATURY
NUMERYCZNEJ
12
KROK PO KROKU
Z
akoƒczy∏ si´ monta˝ modu∏u Bluetooth, teraz pora na nowy etap. B´dzie nim z∏o˝enie mo-
du∏u mózgu i wzroku. Pod koniec tego etapu i-D01 b´dzie wyposa˝ony w „mózg” i „wzrok”
sk∏adajàcy si´ z kamery CMOS zainstalowanej w g∏owie. Równolegle, w kolejnych nume-
rach b´dzie si´ te˝ odbywa∏ monta˝ uk∏adu ruchu i-D01. B´dzie to mo˝liwe dzi´ki cz´Êciom przed-
niego lewego ko∏a. Jednak pierwsze cz´Êci sk∏adowe tego etapu wià˝à si´ z uk∏adem ruchu kor-
pusu w gór´ i w dó∏. Jak ju˝ mówiliÊmy, i-D01 b´dzie móg∏ zmieniaç pozycj´, podnosiç si´ i sia-
daç. B´dzie mu do tego s∏u˝yç silnik elektryczny, oddalajàcy lub przybli˝ajàcy korpus do podsta-
wy robota. Ruch ten b´dzie p∏ynny dzi´ki amortyzatorowi. W∏aÊnie jego cz´Êcià sà elementy do-
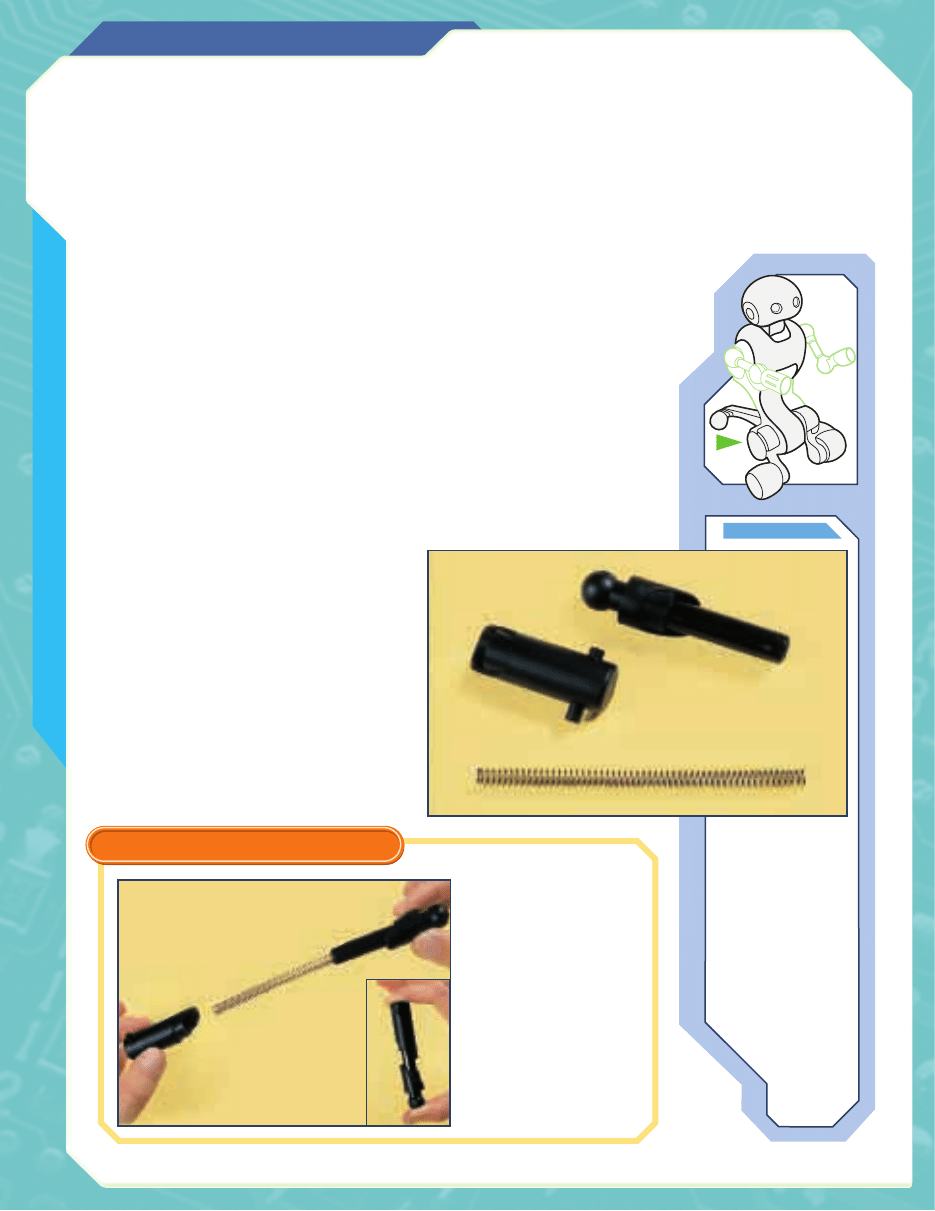
∏àczone do tego numeru. Pierwszym z nich jest cylinder, który zostanie zainstalowany na wspor-
niku tylnego ko∏a robota. Wewnàtrz cylindra znajdzie si´ d∏uga spr´˝yna, która sprawi, ˝e ruch
b´dzie bardziej p∏ynny. Dope∏nieniem mechanizmu
jest t∏ok, który zostanie pod∏àczony do wspornika
przednich kó∏ i-D01. Przesuwajàc si´ wewnàtrz cylin-
dra, umo˝liwi on ruch w gór´ i w dó∏. Na razie te trzy
cz´Êci nie mogà byç jeszcze zamontowane, od∏ó˝ je za-
tem na bok i poczekaj na monta˝ tego elementu.
D
Do
o∏∏à
àcczzo
on
ne
e d
do
o tte
eg
go
o n
nu
um
me
erru
u cczz´
´ÊÊccii rro
ozzp
po
occzzy
yn
na
ajjà
à n
no
ow
wy
y e
etta
ap
p m
mo
on
ntta
a˝˝u
u,,
k
kttó
órre
eg
go
o cce
elle
em
m b
b´
´d
dzziie
e zz∏∏o
o˝˝e
en
niie
e m
mo
od
du
u∏∏u
u m
mó
ózzg
gu
u ii w
wzzrro
ok
ku
u,, d
do
ok
ko
oƒ
ƒcczze
en
niie
e
m
mo
on
ntta
a˝˝u
u u
uk
k∏∏a
ad
du
u rru
ucch
hu
u o
orra
azz iin
nsstta
alla
accjja
a k
ka
am
me
erry
y C
CM
MO
OS
S..
1. cylinder umo˝liwiajàcy
ruch talii
2. t∏ok umo˝liwiajàcy ruch
talii
3. spr´˝yna
KOMPONENTY
2.
3.
1.
UK¸AD RUCHU I MODU¸ MÓZGU I WZROKU, CZ¢Âå 1
Cz´Êci do∏àczone do tego
numeru nie mogà byç
na razie z∏o˝one. Jednak ju˝
teraz mo˝esz sprawdziç ich
dzia∏anie. W tym celu w∏ó˝
spr´˝yn´ do cylindra, tak
jak pokazano na wi´kszym
zdj´ciu po lewej stronie.
Teraz spróbuj Êcisnàç cylinder
i t∏ok (zobacz zbli˝enie
na mniejszym zdj´ciu
po lewej stronie), Êciskajàc
w ten sposób znajdujàcà si´
w ich wn´trzu spr´˝yn´.
Kiedy wciÊniesz je do koƒca,
t∏ok i cylinder powinny
zetknàç si´ ze sobà.
WSKAZÓWKI
AMORTYZATOR
KORPUSU
AMORTYZATOR
KORPUSU
Wyszukiwarka
Podobne podstrony:
i droid instrukcja87a
i droid instrukcja44
i droid instrukcja75
i droid instrukcja35
i droid instrukcja85a
i droid instrukcja82a
i droid instrukcja83b
i droid instrukcja87b
i droid instrukcja88b
i droid instrukcja81a
i droid instrukcja84a
i droid instrukcja82c
i droid instrukcja66
i droid instrukcja87a
i droid instrukcja88a
więcej podobnych podstron