10
K
a˝de rami´ i-D01 b´dzie poruszane przez nap´d elek-
tryczny, który umieÊci∏eÊ ju˝ wewnàtrz obudowy kor-
pusu robota. Prawid∏owe dzia∏anie tych elementów
zale˝y od ustawienia dwóch wa∏ków nap´dowych ruchu
KROK PO KROKU
O
Od
d n
nu
um
me
erru
u 1
17
7 d
do
o 2
22
2 g
grro
om
ma
ad
dzzii∏∏e
eÊÊ cczz´
´ÊÊccii n
na
ap
p´
´d
dó
ów
w o
od
dp
po
ow
wiia
ad
da
ajjà
àccy
ycch
h zza
a rru
ucch
h rra
am
miio
on
n
ii--D
D0
01
1.. A
Ab
by
y w
w p
prrzzy
ysszz∏∏o
oÊÊccii u
un
niik
kn
nà
àçç e
ew
we
en
nttu
ua
alln
ny
ycch
h p
prro
ob
blle
em
mó
ów
w,, w
wa
arrtto
o tte
erra
azz ssp
prra
aw
wd
dzziiçç
u
u∏∏o
o˝˝e
en
niie
e n
niie
ek
kttó
órry
ycch
h w
we
ew
wn
n´
´ttrrzzn
ny
ycch
h cczz´
´ÊÊccii n
na
ap
p´
´d
dó
ów
w..
wychodzàcych z obudowy. W tym momencie warto spraw-
dziç ich u∏o˝enie, by uniknàç niemi∏ych niespodzianek wte-
dy, gdy w jednym z najbli˝szych etapów zamocowane zo-
stanà ramiona.
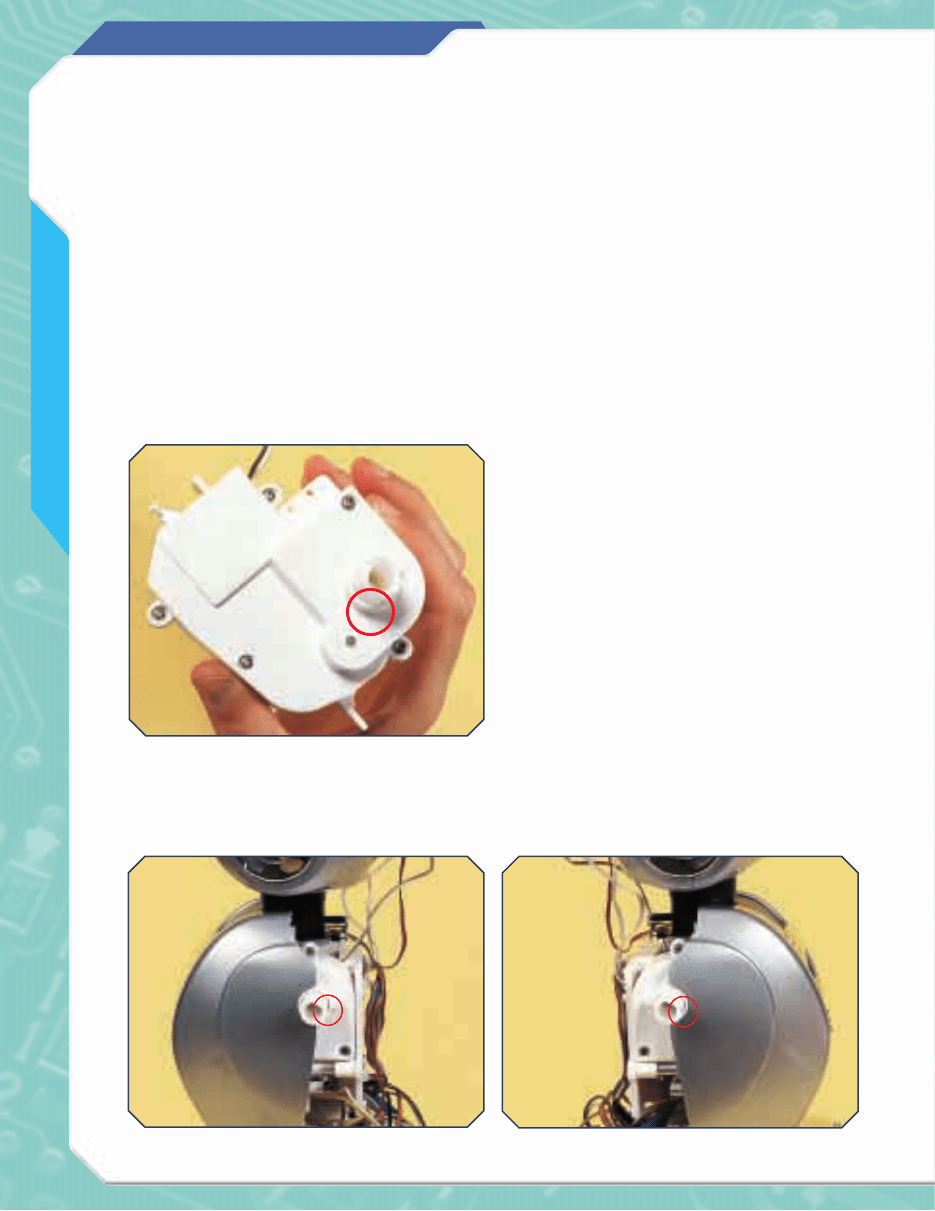
PRAWID¸OWE PO¸O˚ENIE
Aby sprawdziç u∏o˝enie wa∏ków ruchu, nie trzeba wyjmo-
waç nap´dów z wn´trza korpusu. Wystarczy przyjrzeç si´
i-D01 z jednej strony, a nast´pnie z drugiej, zwracajàc szcze-
gólnà uwag´ na wa∏ki. Na koƒcach wa∏ków, które wystajà
z korpusu, widaç wyst´p w kszta∏cie pó∏ksi´˝yca (jego u∏o-
˝enie zaznaczone jest na zdj´ciu po lewej stronie) – mo˝e-
my wykorzystaç go jako punkt odniesienia przy testowaniu
u∏o˝enia. Najpierw spójrzmy na lewy bok robota (uznajàc,
˝e jest to bok, który jest lewy dla samego robota) – wyst´p
wa∏ka ruchu powinien byç zwrócony do ty∏u robota (patrz
zdj´cie na dole po lewej). Przejdêmy teraz do prawego bo-
ku robota – tu wyst´p powinien byç zwrócony do przodu
robota, tak jak widaç na poni˝szym zdj´ciu. JeÊli tak jest, wa∏-
ki u∏o˝one sà prawid∏owo i nie trzeba nic z nimi robiç.
JeÊli jednak wyst´p na koƒcu wa∏ka zwrócony jest w nie-
w∏aÊciwà stron´, nale˝y wyciàgnàç nap´dy ramion z miej-
sca, w którym si´ znajdujà, otworzyç je i sprawdziç cz´Êci
wewn´trzne. Najpierw trzeba sprawdziç u∏o˝enie wa∏ka ru-
chu wobec ko∏a z´batego, z którym si´ zaz´bia. Dla obudo-
Cz´Êcià obudowy nap´dów ramion i-D01 jest wa∏ek
przenoszenia ruchu. Widaç na jego koƒcu wyst´p
(powy˝ej). Powinien byç zwrócony w stron´ ty∏u
robota dla nap´du lewego ramienia (zdj´cie poni˝ej),
zaÊ do przodu w przypadku nap´du prawego ramienia
(zdj´cie poni˝ej po prawej).
PORADNIK MONTA˚U ROBOTA
PRZEKLADNIE
NAPEDÓW RAMION
PRZEK¸ADNIE
NAP¢DÓW RAMION
P
PR
RZ
ZE
EK
K¸
¸A
AD
DN
NIIE
E N
NA
AP
P¢
¢D
DÓ
ÓW
W R
RA
AM
MIIO
ON
N
wy lewego ramienia ma∏e naci´cie ko∏a powinno odpowia-
daç oznaczeniu w kszta∏cie litery „L” na wa∏ku, z kolei dla
obudowy prawego ramienia oznaczeniu w kszta∏cie litery „R”.
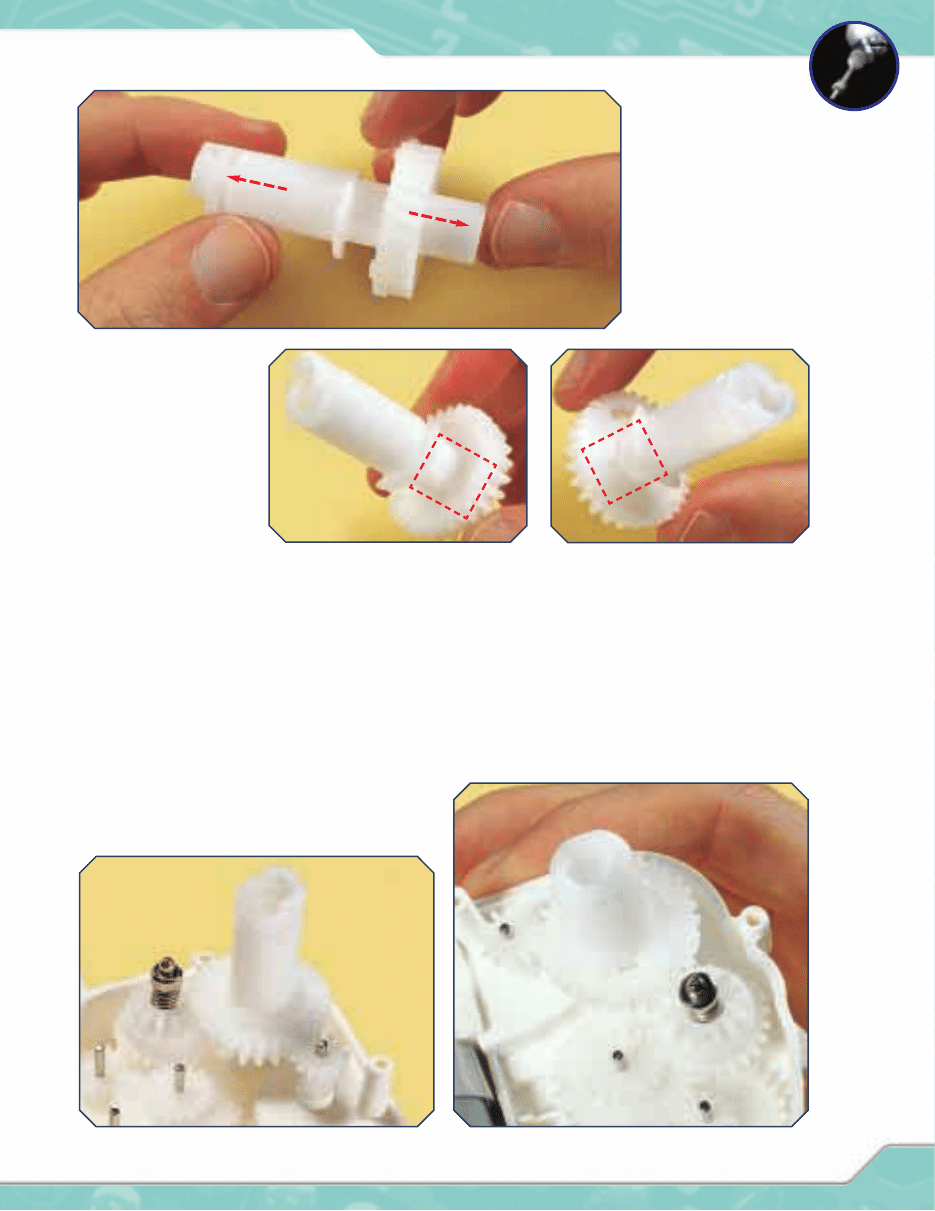
JeÊli ustawienia te sà prawid∏owe, ale u∏o˝enie wa∏ków nie,
odpowiedzià mogà byç same wa∏ki. Sk∏adajà si´ one z dwóch
oddzielnych cz´Êci – osi i ko∏a z´batego. Kiedy sà oddziel-
nie (wystarczy popchnàç koƒcówk´ osi od strony przeciw-
nej do pó∏ksi´˝ycowatego wypustu), mo˝na zobaczyç, ˝e
w kole znajdujà si´ dwa ˝∏obki w Êrodkowym okràg∏ym
otworze. Jeden w pobli˝u oznaczenia „L”, drugie – w pobli-
˝u oznaczenia „R”. Na osi natomiast jest wyst´p odpowia-
dajàcy kszta∏tem ˝∏obkowi. W przypadku wa∏ka obudowy le-
wego ramienia (z silnikiem z przewodami w kolorach ˝ó∏-
tym i bia∏ym) wyst´p osi powinien wchodziç w ˝∏obek ko∏a
w pobli˝u litery „L” i odwrotnie – w przypadku obudowy pra-
wego nap´du (przewody bràzowy i bia∏y) wyst´p osi powi-
nien znajdowaç si´ w ˝∏obku ko∏a w pobli˝u litery „R”. Po
dokonaniu niezb´dnych zmian w u∏o˝eniu wa∏ków i cz´Êci
sk∏adowych nap´du, u∏o˝enie samych wa∏ków powinno
wreszcie byç prawid∏owe.
W lewym nap´dzie (zdj´cie poni˝ej) znacznik ko∏a
powinien odpowiadaç literze „L” wa∏ka ruchu,
w nap´dzie prawym (zdj´cie poni˝ej po prawej)
powinien odpowiadaç literze „R”.
11
Wa∏ek ruchu sk∏ada si´
z ko∏a z´batego i osi,
które mo˝na roz∏àczyç
(zdj´cie po lewej).
W przypadku lewego
nap´du wyst´p na osi
powinien wchodziç
w ˝∏obek w pobli˝u
litery „L” ko∏a (zdj´cie
poni˝ej po lewej), zaÊ
w przypadku nap´du
prawego ramienia wyst´p
na osi powinien wchodziç
w ˝∏obek w pobli˝u
litery „R” (zdj´cie poni˝ej).

12
KROK PO KROKU
C
z´Êci do∏àczone do tego numeru pomogà w monta˝u uk∏adu ruchu i modu∏u Blu-
etooth. Sk∏adajà si´ przede wszystkim z cz´Êci uk∏adu ruchu i-D01, który w sumie
b´dzie sk∏ada∏ si´ z trzech kó∏, w tym dwóch przednich nap´dowych. G∏ówny z do-
∏àczonych elementów pos∏u˝y do podtrzymywania prawego ko∏a, ale nie tylko. Jest on po-
∏owà wspornika nap´du i-D01. Ta cz´Êç b´dzie zatem pe∏ni∏a wa˝nà funkcj´ w ruchu ro-
bota w gór´ i w dó∏ i przyczynia∏ si´ do utrzymywania górnej cz´Êci robota. Natomiast z punk-
tu widzenia elektromechaniki jej podstawowà rolà jest mocownie silnika elektrycznego
przedniego prawego ko∏a i-D01. Oprócz silnika zawieraç b´dzie w sobie trzy cz´Êci syste-
mu przenoszenia ruchu (w tym ró˝ne ko∏a z´bate, oÊ i ko∏o pasowe). Jedna z cz´Êci (bia∏e
ko∏o z´bate) jest ju˝ umieszczona na odpowiedniej
osi. Ju˝ teraz sprawdê, czy ∏atwo wprowadziç ko∏o
w ruch obrotowy. Prawa cz´Êç wspornika pomieÊci
te˝ system enkodera dla kó∏, jak zwykle z∏o˝onego
z tarczy z otworami oraz odpowiedniej p∏ytki elek-
tronicznej. Do numeru do∏àczono te˝ siedem wkr´-
tów o rozmiarach 3 x 10 mm. Oczekujàc na cz´Êci
wewn´trzne, które zostanà do∏àczone do najbli˝-
szych numerów, przechowaj starannie te, które zna-
laz∏eÊ w tym numerze.
D
Do
o tte
eg
go
o n
nu
um
me
erru
u d
do
o∏∏à
àcczzo
on
no
o p
prra
aw
wà
à cczz´
´ÊÊçç w
wssp
po
orrn
niik
ka
a n
na
ap
p´
´d
du
u ii--D
D0
01
1..
W
Wssp
po
orrn
niik
k b
b´
´d
dzziie
e p
pe
e∏∏n
nii∏∏ ffu
un
nk
kccjj´
´ m
mo
occo
ow
wa
an
niia
a d
dlla
a p
prra
aw
we
eg
go
o k
ko
o∏∏a
a
rro
ob
bo
otta
a,, u
um
miie
esszzcczzo
on
ne
eg
go
o p
po
o tte
ejj ssa
am
me
ejj ssttrro
on
niie
e..
1. prawa cz´Êç wspornika
nap´du
2. siedem wkr´tów
o wymiarach 3 x 10 mm
KOMPONENTY
Na zdj´ciu po lewej stronie
widaç fragment prawej
cz´Êci wspornika nap´du.
PoÊrodku umieszczono
ju˝ bia∏e ko∏o z´bate
na odpowiedniej osi.
B´dzie to cz´Êç systemu
przenoszenia ruchu
z silnika do prawego ko∏a.
2.
1.
UK¸AD RUCHU I MODU¸ BLUETOOTH, CZ¢Âå 2
PRAWA CZESC
WSPORNIKA NAPEDU
PRAWA CZ¢Âå
WSPORNIKA NAP¢DU
Wyszukiwarka
Podobne podstrony:
i droid instrukcja87a
i droid instrukcja44
i droid instrukcja75
i droid instrukcja85a
i droid instrukcja43
i droid instrukcja82a
i droid instrukcja83b
i droid instrukcja87b
i droid instrukcja88b
i droid instrukcja81a
i droid instrukcja84a
i droid instrukcja82c
i droid instrukcja66
i droid instrukcja87a
i droid instrukcja88a
więcej podobnych podstron