12
W
numerze 83 zaprezentowaliÊmy przyk∏adowy kod
w j´zyku C-like do testowania czujników podczer-
wieni znajdujàcych si´ na p∏ytce testowej. Program
pozwala sprawdziç dzia∏anie czujników, nakazujàc i-D01 wy-
powiedzenie s∏owa „prawo”, gdy zidentyfikuje przeszkod´ po
prawej stronie, a „lewo”, gdy przeszkoda b´dzie po jego le-
wej stronie. Z nowà wersjà edytora Visual C-like, który rów-
nie˝ znajdziesz na czwartej p∏ycie CD-ROM, mo˝na stworzyç
dzia∏ajàcy analogicznie program, wykorzystujàcy bloki do za-
rzàdzania GPIO.
ZACHOWANIA
Program iirr_
_sse
en
nsso
orrss_
_ssa
am
mp
plle
e..vvcclliik
ke
e dost´pny jest w katalogu
Esempi na p∏ycie CD-ROM. Na ten program sk∏adajà si´ czte-
ry zachowania. M
Ma
aiin
n konfiguruje jako wejÊcia przerwaniowe
pierwsze i drugie gniazdo z∏àcza zasobnika, zaÊ jako wyjÊcia
– trzecie i czwarte. Nast´pnie zostaje ustawiony generator fa-
li prostokàtnej (czyli wysy∏ania poziomu „wysokiego” i „ni-
W
WÊÊrró
ód
d p
prrzzy
yk
k∏∏a
ad
do
ow
wy
ycch
h p
prro
og
grra
am
mó
ów
w zzn
na
ajjd
du
ujjà
àccy
ycch
h ssii´
´ n
na
a cczzw
wa
arrtte
ejj p
p∏∏y
ycciie
e C
CD
D--R
RO
OM
M jje
esstt jje
ed
de
en
n,,
k
kttó
órry
y p
po
ok
ka
azzu
ujje
e,, jja
ak
k w
wy
yk
ko
orrzzy
ysstta
açç b
bo
occzzn
ne
e cczzu
ujjn
niik
kii p
prro
om
miie
en
nii p
po
od
dcczze
errw
wo
on
ny
ycch
h,, p
po
oss∏∏u
ug
gu
ujjà
àcc ssii´
´
n
no
ow
wà
à w
we
errssjjà
à e
ed
dy
ytto
orra
a V
Viissu
ua
all C
C--lliik
ke
e.. P
Prrzzy
yjjrrzzy
yjjm
my
y ssii´
´ zza
atte
em
m jje
eg
go
o k
ko
od
do
ow
wii..
skiego”, zmieniajàcych si´ cyklicznie) poprzez okreÊlenie cz´-
stotliwoÊci (liczba zmian na sekund´, w czasie których zmie-
nia si´ poziom z wysokiego na niski i odwrotnie) równej 38000
Hz. Pos∏u˝y to do sterowania wyjÊciami, tak by nadajniki ze-
stawu generowa∏y sygna∏ podczerwony o cz´stotliwoÊci roz-
poznawanej przez odbiorniki (38 kHz). Bli˝sze informacje na
temat u˝ywania portów w Visual C-like mo˝na znaleêç w prze-
wodniku po edytorze, zawartym na czwartej p∏ycie CD-ROM.
M
Ma
aiin
n podnosi rami´ wystarczajàco wysoko, by nie wp∏ywa∏o
na czujniki, a nast´pnie uruchamia zachowania W
Wa
aiittLLe
efftt, W
Wa
a--
iittR
Riig
gh
htt i S
Se
en
nd
dS
Sq
qu
ua
arre
eW
Wa
avve
e. Pierwsze dwa oczekujà, a˝ gniaz-
do 1 i gniazdo 2 odbiorà sygna∏ wys∏any przez nadajniki i od-
bity przez przeszkody. Z kolei S
Se
en
nd
dS
Sq
qu
ua
arre
eW
Wa
avve
e steruje gniaz-
dami 3 i 4, za poÊrednictwem których „zapala” (przy u˝yciu
fali prostokàtnej) i „gasi” cyklicznie wysy∏anie sygna∏u w pod-
czerwieni: ta operacja jest niezb´dna do prawid∏owego funk-
cjonowania odbiorników.
PROGRAMOWANIE
KROK PO KROKU
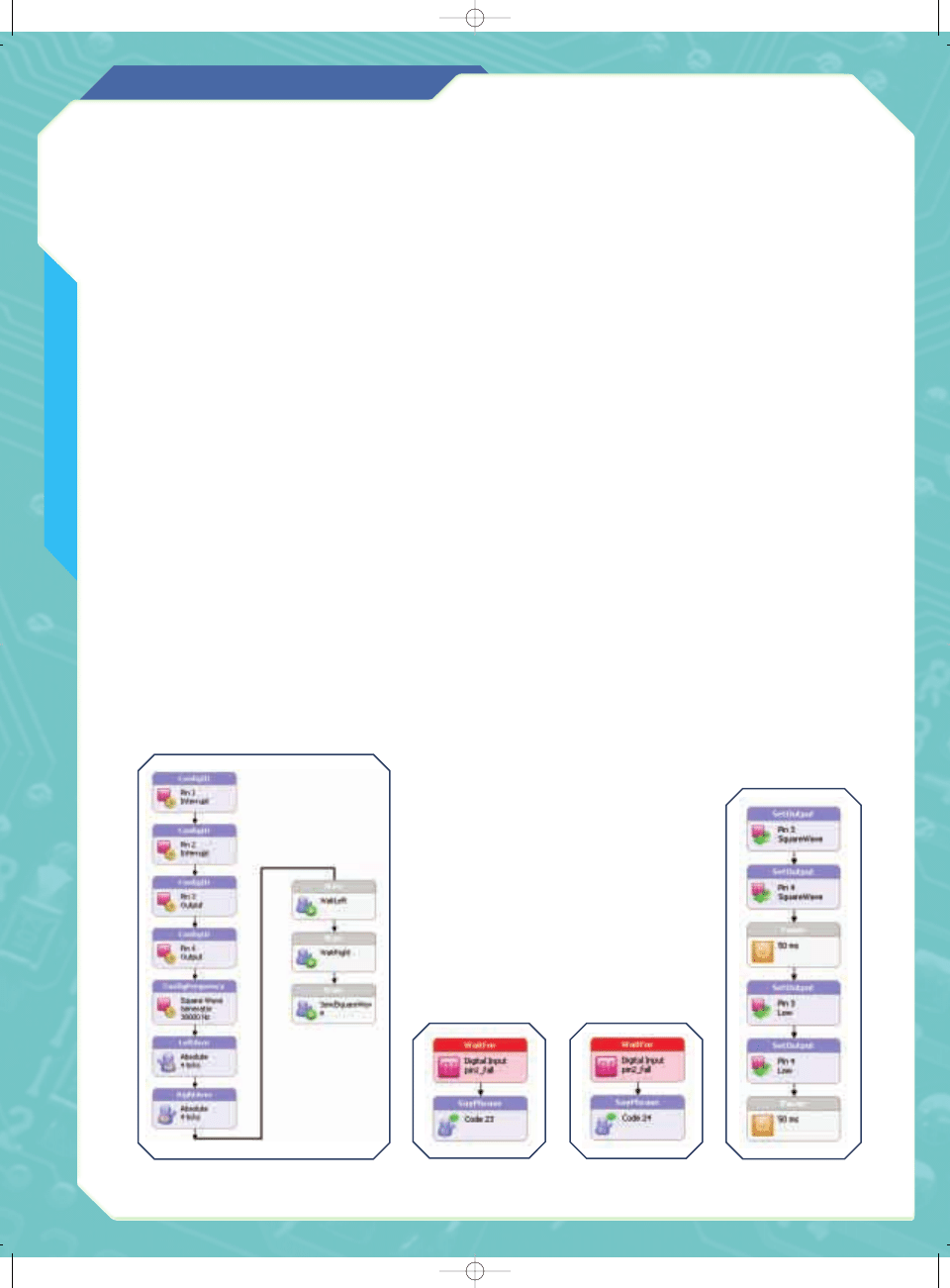
Na zdj´ciach widaç bloki graficzne czterech
zachowaƒ programu ir_sensors_sample.vclike.
Main (po lewej) ustawia porty GPIO z∏àcza
zasobnika jako przerwaniowe i jako wyjÊcia.
Zachowania WaitLeft (poni˝ej po lewej)
i WaitRight (poni˝ej po prawej) ustawiajà
reakcj´ robota na zidentyfikowanie przeszkód.
SendSquareWave (po prawej) „zapala” i „gasi”
transmisj´ sygna∏u.
CZUJNIKI BOCZNE
W VISUAL C-LIKE
CZUJNIKI BOCZNE
W VISUAL C-LIKE
robot 88 12 11/14/07 12:19 PM Page 12
Wyszukiwarka
Podobne podstrony:
i droid instrukcja87a
i droid instrukcja44
i droid instrukcja75
i droid instrukcja35
i droid instrukcja85a
i droid instrukcja43
i droid instrukcja82a
i droid instrukcja83b
i droid instrukcja87b
i droid instrukcja88b
i droid instrukcja81a
i droid instrukcja84a
i droid instrukcja82c
i droid instrukcja66
i droid instrukcja87a
więcej podobnych podstron