
Politechnika Gdańska
Wydział Elektrotechniki i Automatyki
Katedra
Inżynierii Systemów Sterowania
Podstawy Automatyki
Badanie i synteza kaskadowego adaptacyjnego układu
regulacji do sterowania obiektu o dynamice nieliniowej
–
precyzyjne pozycjonowanie masy w warunkach
nieliniowego tarcia
Zadania do ćwiczeń laboratoryjnych – termin T12
Opracowanie:
Mieczysław A. Brdyś, prof. dr hab. inż.
Wojciech Kurek
, mgr inż.
Grzegorz Ewald
, mgr inż.
Gdańsk, maj 2010
2
Sterowanie Kaskadowe
Kaskadowe
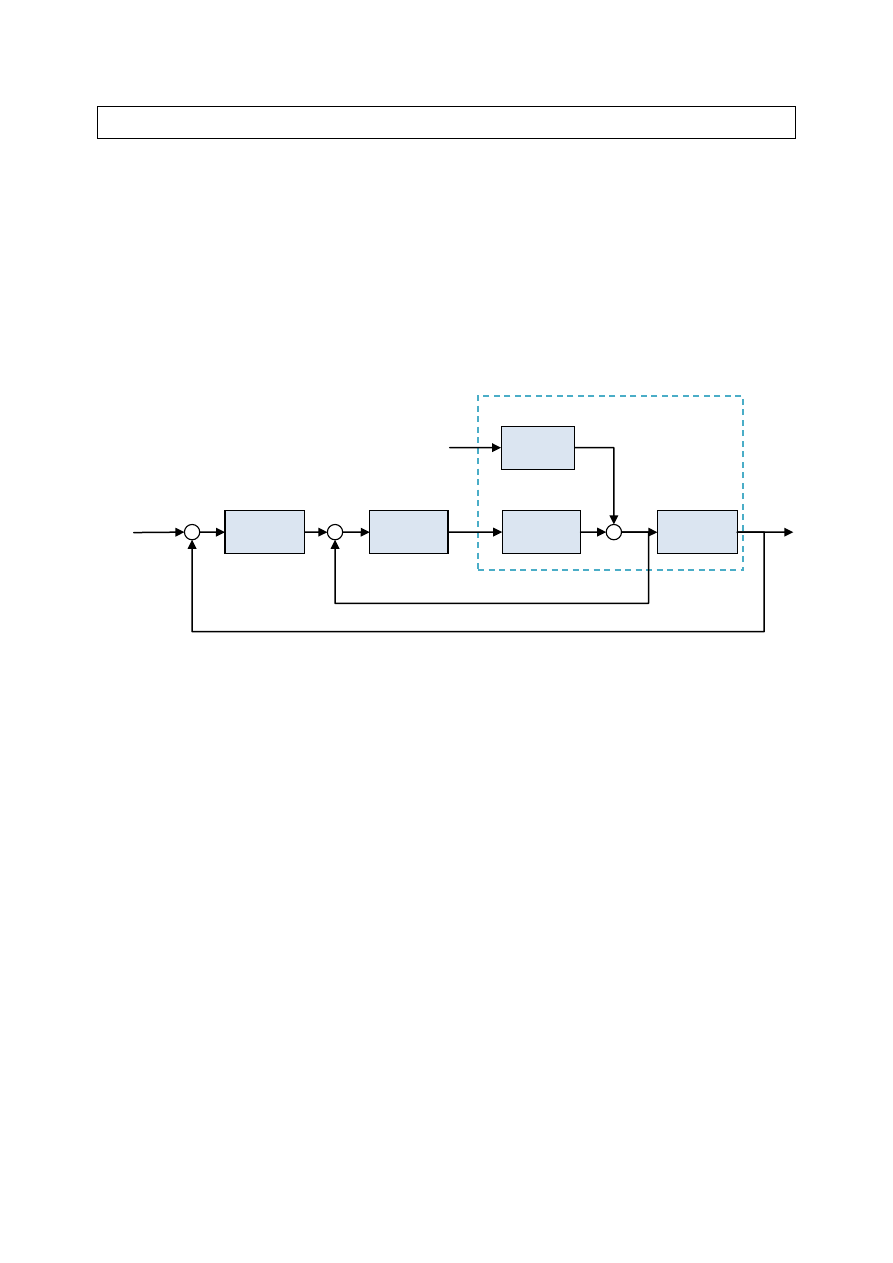
systemy sterowania stanowią szczególny przypadek układów z
pomocniczą zmienna sterowaną. Ogólny schemat kaskadowego układu sterowania
jest pokazany na rysunku 1. Główny regulator G
C2
nie wpływa bezpośrednio na
wielkość sygnału sterującego podawanego na obiekt sterowania, odpowiedzialny jest
on jedynie za generowanie wartości zadanej dla dodatkowego regulatora G
C1
.
Znajduje się on w wewnętrznej pętli sterowania zmienna pomocniczą Y
a
. Z uwagi na
wpływ zakłócenia na G
P1
, przed pomiarem wartości sterowanej w pętli wewnętrznej
główny nacisk za eliminacje tego zakłócenia ma regulator G
C1
. Natomiast regulator
G
C2
, znajdujący się w pętli zewnętrznej, musi w takim wypadku w znacznie
mniejszym stopniu reagować na zakłócenie i jedynie generować sygnał zadany dla
regulatora G
C1
.
W przypadku kiedy mam do czynienia z wieloma pomocniczymi zmiennymi
sterowanymi, układ kaskadowy może składać się z wielu połaczonych ze sobą
kaskad.
Projektowanie struktury i/lub parametrów układu regulacji kaskadowej może zostać
podzielone na dwa odrębne kroki.
1.
Wyznaczenie regulatora w pętli wewnętrznej aby uzyskać wymaganą
dynamike pomocniczej zmiennej sterowanej Y
a
oraz oczekiwany poziom
kompensacji zakłóceń
2.
Następnie wyznaczenie regulatora w pętli zewnętrznej zapewniającego
wymagane parametry jakościowe działania układu dla zmiennej sterowanej
(np. zapenienie odpowiedniego uchybu w stanie ustalonym, zapewnienie
wymaganych jakościowych parametrów stanów przejściowych)
Y
zad
U
2
C
G
s
Z
G
s
1
C
G
s
1
P
G
s
2
P
G
s
+
+
+
+
-
-
Z
Y
Y
a
Obiek
t
Rysunek 1
. Schemat blokowy kaskadowego układu regulacji
3
Podstawowe zalety sterowania kaskadowego
Głownymi zaletami wynikający z zastosowania sterowania kaskadowego są między
innymi:
Lepsze sterowanie sygnałem sterowanym
Zmniejszenie wpływu zakłócenia na sygnał sterowany/wyjściowy
Poprawione zostają parametry jakościowe związane ze stanami
przejściowymi, np. można ograniczyć przeregulowania
Przykłady układów regulacji kaskadowej
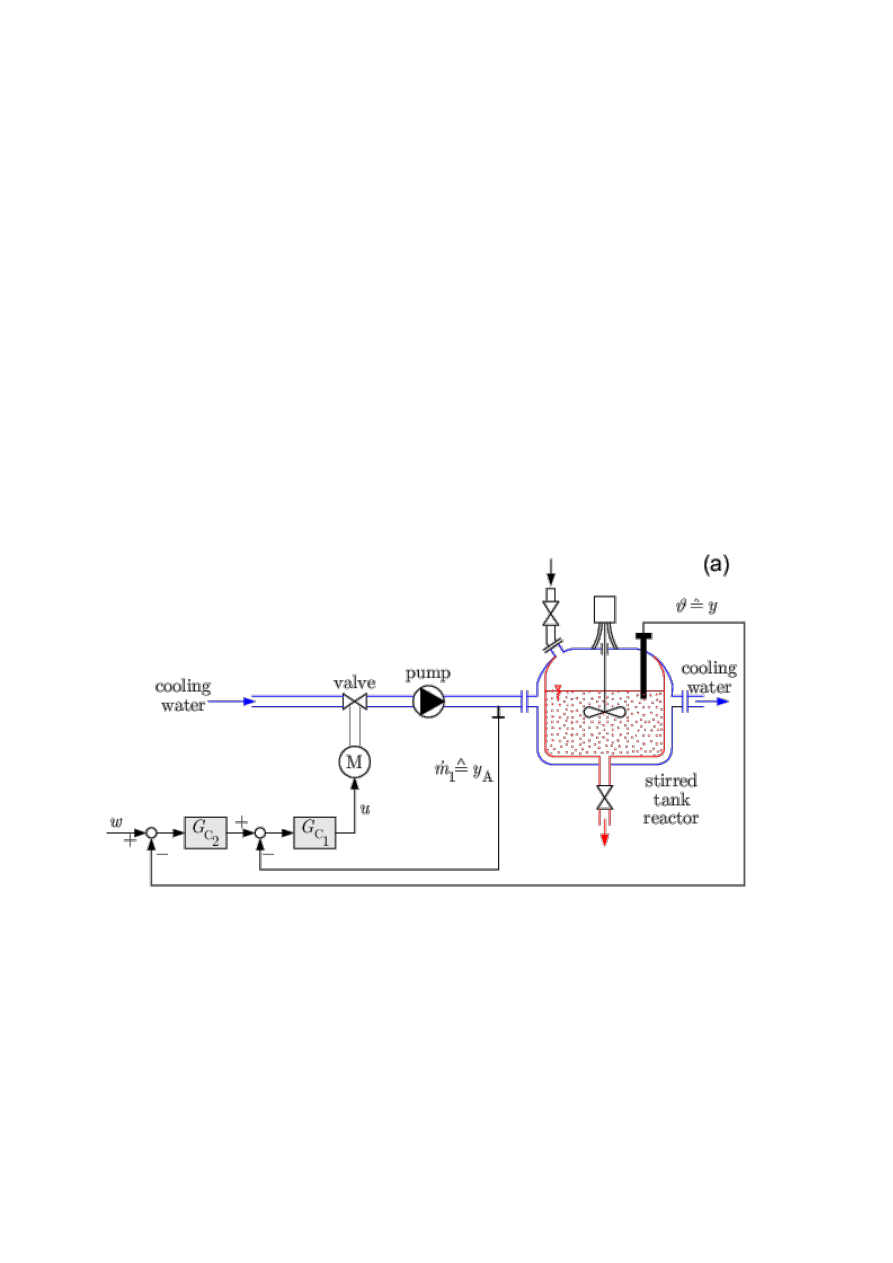
Układy regulacji kaskadowej bardzo często stosowane są między innymi w
przemyśle chemicznym i naftowym. Poniżej przedstawiony jest przykład układu
regulacji kaskadowej pr
zeznaczonego do sterowania temperatura we wnętrzu
reaktora chemicznego. Reaktor ten chłodzony jest z wykorzystaniem płaszcza
wodnego. Regulator w pętli zewnętrznej odpowiedzialny jest za utrzymanie
temperatury we wnętrzu reaktora na zadanym poziomie. Natomiast regulator w pętli
wewnętrznej reguluje natężenie przepływu cieczy chłodzącej. Należy zauważyć iż
dynamika pętli wewnętrznej w tym przypadku jest szybsza niż pętli zewnętrznej.
Rysunek 2
. Przykładowy układ regulacji kaskadowy, mający na celu sterowanie
temperaturą w reaktorze chemicznym
4
Schemat oraz podstawowe parametry układu regulacji
O
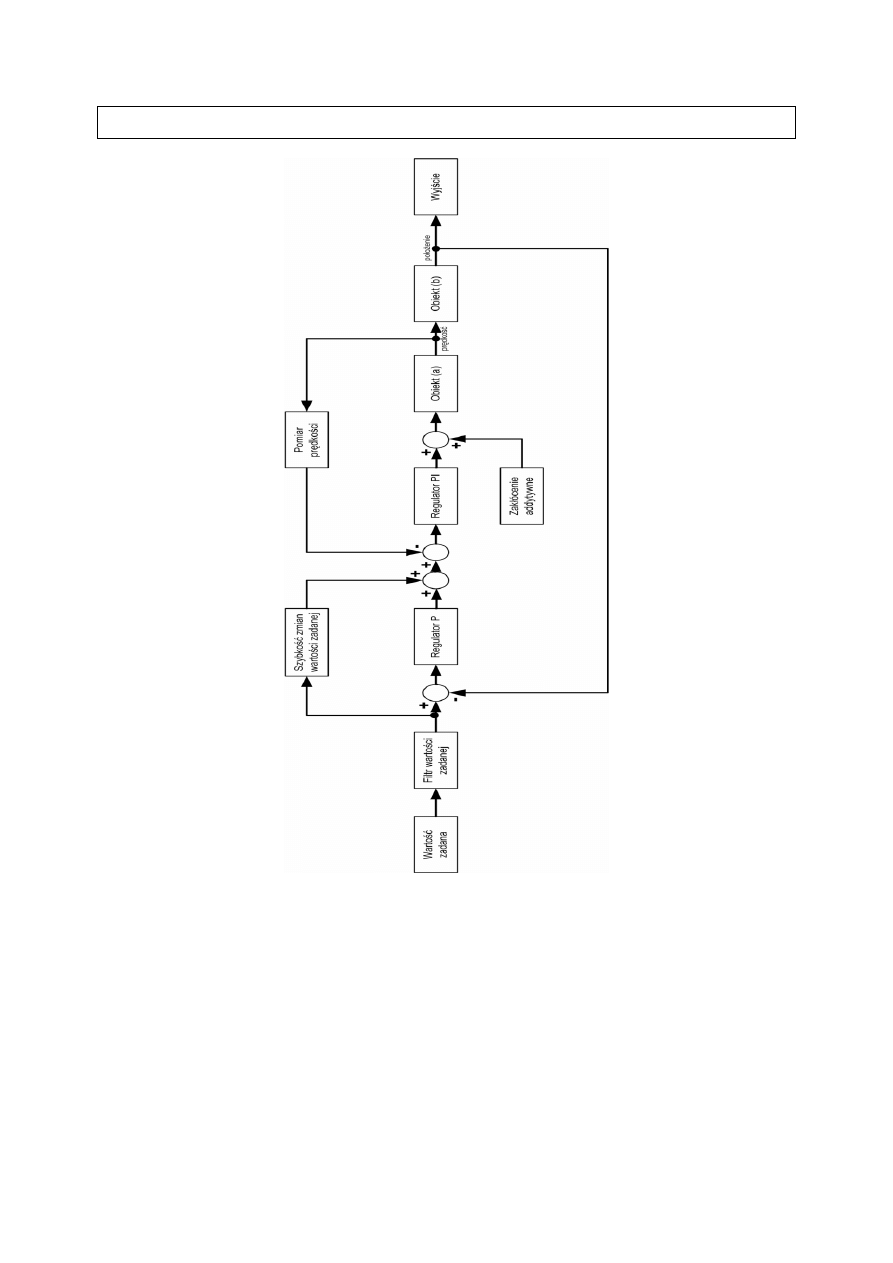
pis układu regulacji
Filtrowanie wartości zadanej odbywa się za pomocą filtru dolnoprzepustowego
pierwszego rzędu o stałej czasowej równej 0,02 s oraz wzmocnieniu 1. Pomiar
prędkości dokonywany jest za pomocą urządzenia, które możemy zamodelować za
pomocą filtru dolnoprzepustowego pierwszego rzędu o stałej czasowej równej 0,1 s
oraz wzmocnieniu 1. Regulator P posiada stałe wzmocnienie równe 0,1. Regulator PI
posiada stałą czasową równą 0,83 s. Dobór wartości wzmocnienia regulatora PI jest
celem ćwiczenia laboratoryjnego.
Zakłócenie addytywne posiada przebieg sinusoidalny o amplitudzie 1 oraz
częstotliwości równej 2 Hz.
5
Zadanie 1
W oparciu o
materiały pomocnicze, zbuduj model kaskadowego układu
pozycjonowania masy obiektu z nieliniowym tarciem.
Zadanie 2
Wyznacz eksperymentalnie wartość wzmocnienia regulatora PI w wewnętrznej pętli
regulacji, tak aby zapewnić akceptowalnie małe przeregulowanie (XX% wartości
ustalonej), bez względu na dokładność w stanie ustalonym.
Zadanie 3
Wyznacz eksperymentalnie war
tość wzmocnienia regulatora PI w wewnętrznej pętli
regulacji, tak aby zapewnić dużą dokładność śledzenia w stanie ustalonym (błąd nie
powinien przekraczać 3% wartości ustalonej), bez względu wartość przeregulowania
w stanie przejściowym. Wyznacz eksperymentalnie graniczoną wartość
wzmocnienia, przy której układ regulacji jest stabilny.
Zadanie 4
Zaproponuj
funkcję uzależniającą wartość wzmocnienia od aktualnego stanu
operacyjnego obiektu. Zwróć uwagę, aby przebieg funkcji gwarantował poprawną
pracę układu regulacji w pełnym zakresie pracy układu regulacji.
Zadanie 5
Zmodyfikuj układ regulacji, wprowadzając do niego elementy odpowiedzialne za
adaptacyjny dobór wartości wzmocnienia w oparciu o funkcję zaproponowaną w
zadaniu poprzednim
. Zbadaj działanie układu.
Zadanie 6
Eksperymentalnie skoryguj wartości dobranych wzmocnień tak, aby uzyskać
możliwie najlepszą jakość regulacji, zarówno w stanach przejściowych jak i
ustalonych.
Wyszukiwarka
Podobne podstrony:
Cw 10 Uklad regulacyjny stabili Nieznany
PA UCHYB USTAKONY REGULACJI id Nieznany
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
Genetyczna regulacja embriogene Nieznany
06 Układ regulacji (jego zadanie i struktura)
2 Uklad okresowy Mendelejewaid Nieznany (2)
05 Dobor nastaw regulatora w ko Nieznany (2)
09 uklad kierowniczy 5MCOQGXUO3 Nieznany (2)
Układ regulacji poślizgu napędu ASR, Instrukcje
Informatyka regulamin pracowni Nieznany
1 Plaski uklad silid 9541 Nieznany (2)
WYKŁAD 15 Regulacja kaskadowa SI
instrukcja bhp regulamin korzys Nieznany (6)
Dobor parametrow regulatora id Nieznany
L4 Układ regulacji ciągłej Badanie regulatorów
więcej podobnych podstron