Zadania i metody automatycznej regulacji
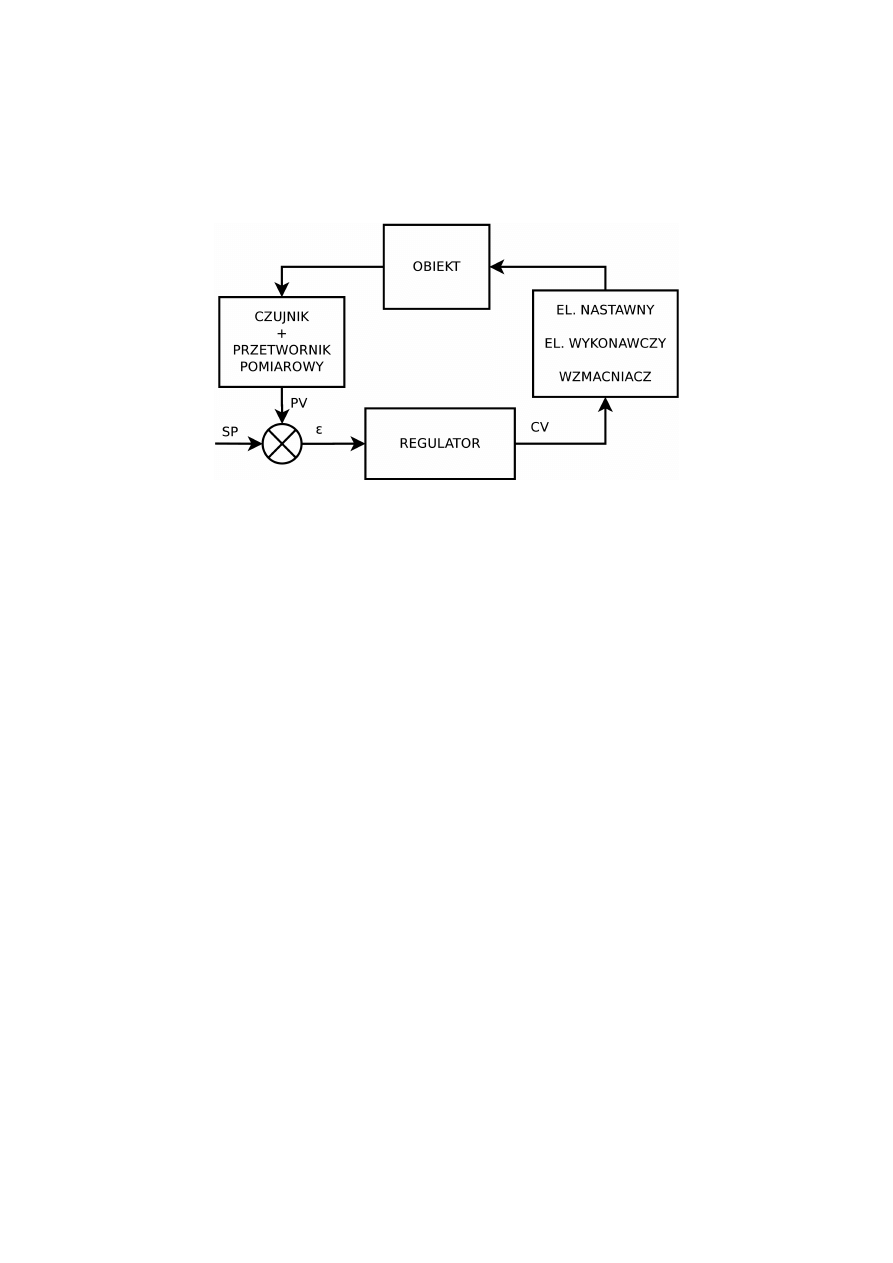
Regulacja automatyczna to sterowanie samoczynne w układzie zamkniętym czyli
samoczynne utrzymywanie wymaganych sygnałów wejściowych obiektu. Regulacja ma za zadanie
zminimalizowanie wpływu zakłóceń na układ.
W pętli występują wielkości:
•
SP – wartość zadana
•
PV – wartość procesowa
•
CV – zmienna sterująca
•
– uchyb
ε
Regulator PID
Regulatorem najczęściej stosowanym w pętli jest
regulator PID. Najczęściej występuje on
w konfiguracji PIDIND, w której sygnał uchybu jest podawany na trzy niezależne tory, których
wyjścia są sumowane. Występują w nim:
•
człon proporcjonalny – najprostszy, brak właściwości dynamicznych. Obwód regulacji z
tylko tym członem charakteryzuje się obecnością uchybu. Tor opisywany parametrem
wzmocnienia k
p
.
•
człon całkujący – regulator używający tego członu zapewnia zerowy uchyb w stanie
ustalonym. Pogarsza on właściwości dynamiczne regulatora. Parametr: czas zdwojenia t
i
.
•
człon różniczkujący – reaguje on na zmianę uchybu, poprawia szybkość reakcji regulatora.
Opisywany czasem wyprzedzenia t
d
.
Metody doboru nastaw regulatora PID
Do doboru regulatora i jego dostrojenia potrzebna jest znajomość cech statycznych i
dynamicznych obiektu, oraz kryterium pozwalające oceniać i porównywać uzyskane wyniki. Ważny
jest również charakter działających na układ zakłóceń.
Metody eksperymantalne:
•
I metoda ZiegleraNicholsa – metoda
wzmocnienia krytycznego. Polega na zwiększaniu
wzmocninia w członie proporcjonalnym, który jest jedynym aktywnym torem regulatora, aż
do powstania stałych oscylacji. Autorzy metody podali wzory, które na podstawie wartości
wzmocnienia oraz okresu drgań pozwalają wyznaczyć parametry nastaw regulatora
Układ regulacji z zamkniętą pętlą
P/PI/PID. Metoda ta może być zbyt niebezpieczna w przypadku pewnych układów.
•
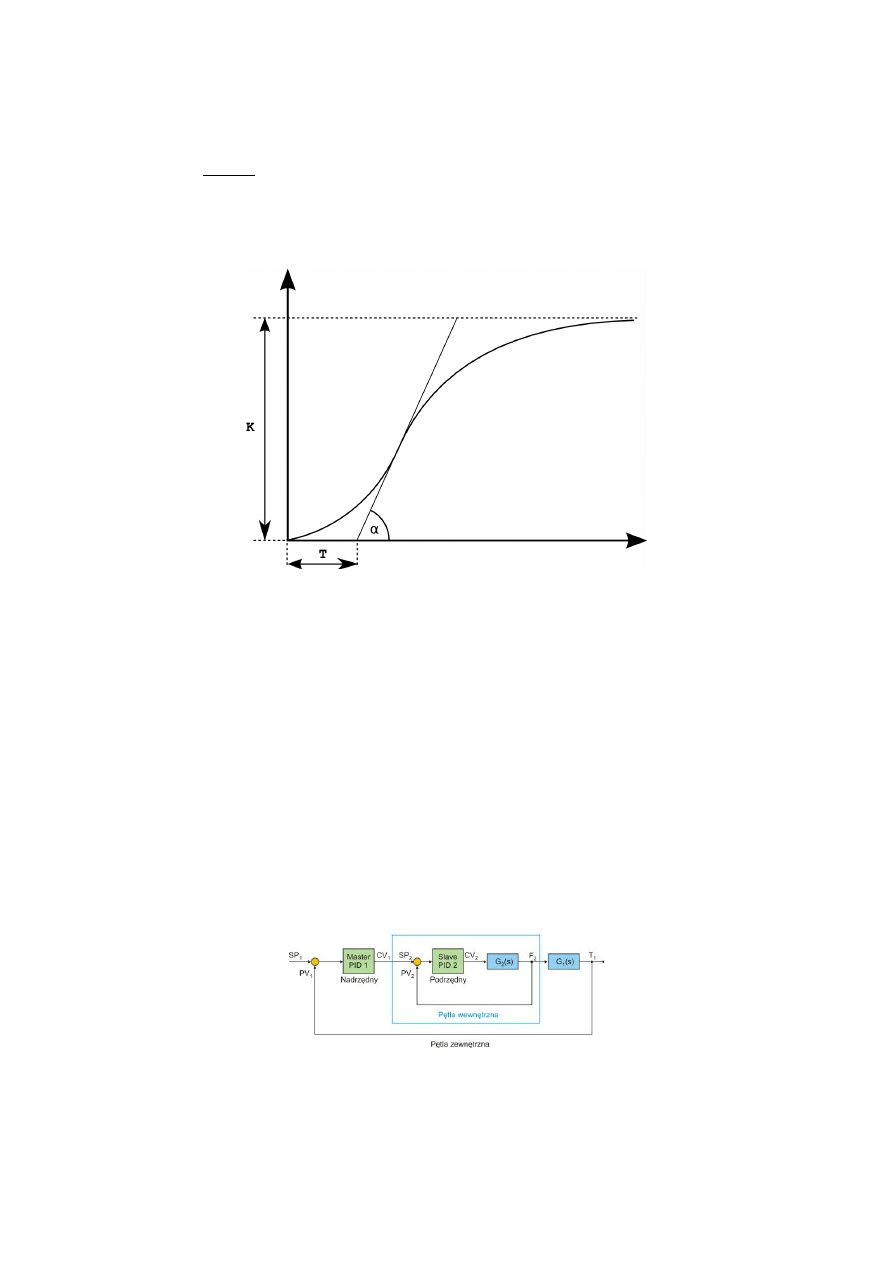
II metoda ZiegleraNicholsa – W tej odmianie metody parametryzuje się układ jako
składający się z członu inercyjnego o stałej T
i
razem z opóźnionieniem o czas T:
G s=
K
T
i
s1
e
−
Ts
. Polega ona na zbadaniu
odpowiedzi skokowej układu. Z wykresu
odczytuje się parametry wzmocnienia K oraz współczynnik kierunkowy tg(a) prostej
przechodzącej przez punkt przegięcia krzywej. Na tej podstawie wyznacza się parametry
regulatora.
Inne typy regulatorów
Kaskada
Składa się z dwóch obwodów sprzężenia, w której wartość sterująca pętli zewnętrznej jest
wartością zadaną pętli wewnętrznej. Stosuje się ją w przypadku obiektów w których można
wydzielić procesy o znacznie różniącej się inercji. Za zakłócenia o częstotliwości wyższej
odpowiada pętla wewnętrzna, za długoterminowe pętla zewnętrzna. Przykład: duży obiekt
ogrzewany przepływającym czynnikiem, sterowanie odbywa się otwarciem zaworu. Za ustalenie
wartości otwarcia zaworu odpowiada pętla wewnętrzna, a zadaną wartość przepływu generuje pętla
zewnętrzna.
Regulator wewnętrzny jest najczęściej tylko proporcjonalny, ponieważ uchyb jest kompensowany
przez pętlę zew., a szybkozmienne zakłócenia, które eliminowałby tor różniczkujący, są pochłaniane
przez obiekt o dużej inercji.
Regulator dwu i trójstanowy
Regulator dwustanowy posiada dwa aktywne stany. Najczęściej jest to stan aktywny oraz brak
sterowania. Działa on na zasadzie porównywania sygnału wejściowego z ustawionym progiem. W
zależności od tego czy sygnał jest większy czy mniejszy przyjmuje on odpowiedni stan. Używa się
ich np. w termostatach, układach napełniających zbiorniki do pewnego poziomu. Po podaniu
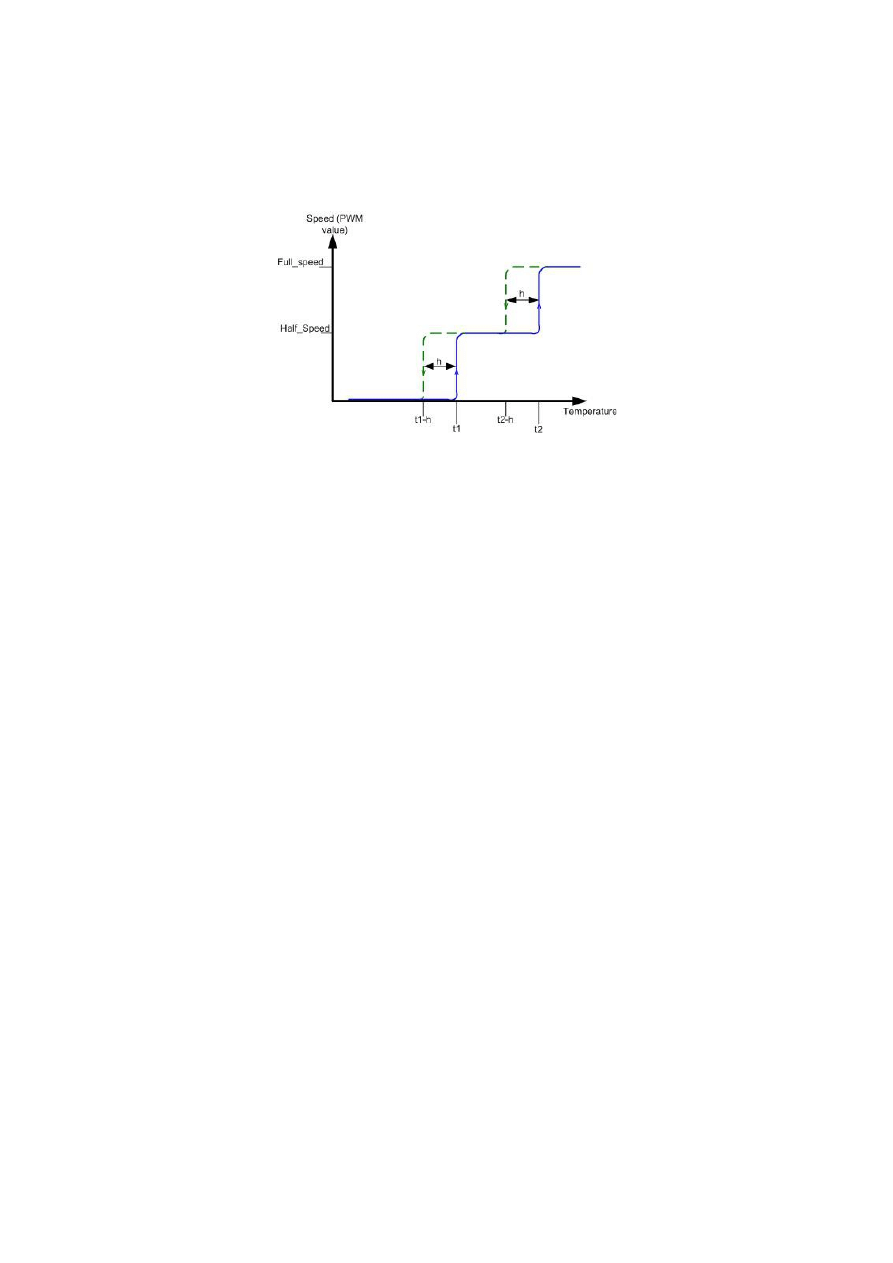
przebiegu trójkątnego jako progu regulator ten może zamieniać ciągły sygnał sterujący z innego
regulatora na przebieg prostokątny zmodulowany PWM. Jest to użyteczne w przypadku elementu
wykonawczego który może znajdować się w tylko dwóch stanach. Rozszerzeniem regulatora
dwustanowego jest dodanie trzeciego stanu aktywnego, najczęściej o przeciwnym znaku do stanu
pierwszego.
Aby zapobiec częstemu przełączaniu regulatorów stosuje się histerezę. Polega ona na
przesuwaniu progów przełączania w zależności od bieżącego stanu układu.
Po sprzężeniu regulatora trójstanowego z elementem całkującym sterowanie, jak silnik albo
siłownik, otrzymuje się
regulator kroczący. Jako jego wyjście traktuje się położenie które w
przeciwieństwie do wyjścia samego regulatora jest sygnałem ciągłym. Przykładem jest
serwomechanizm albo pozycjoner.
Regulator z logiką rozmytą
Koncepcja logiki rozmytej (fuzzy logic) powstała w latach 60, zaproponowana przez Lotfi Zadeha.
Znalazła zastosowanie w automatyce. Sygnał w regulatorze ulega następującym procesom:
•
Rozmywanie (fuzyfikacja) – sygnał ulega rozmyciu, czyli rozbiciu na funkcje przynależności
•
Wnioskowanie (interferencja) – na podstawie bazy reguł (przesłanek) zostaje wypracowana
wynikowa funkcja przynależności. Przesłanki powstają na bazie doświadczeń osoby
zajmującej się danym procesem.
•
Ostrzenie (defuzyfikacja), zamiana obliczonego sygnału na sygnał wyjściowy(sterujący)
Algorytm predykcyjny Smith'a
Regulator z predykcją został wymyślony przez Otto J. M. Smitha w roku 1957. Stosuje się go
w przypadku regulacji obiektów z dużym opóźnieniem. Do działania wymaga on znajomości
modelu układu oraz czasu opóźnienia reakcji na sterowanie.
Przykład histerezy w regulatorze trójstanowym
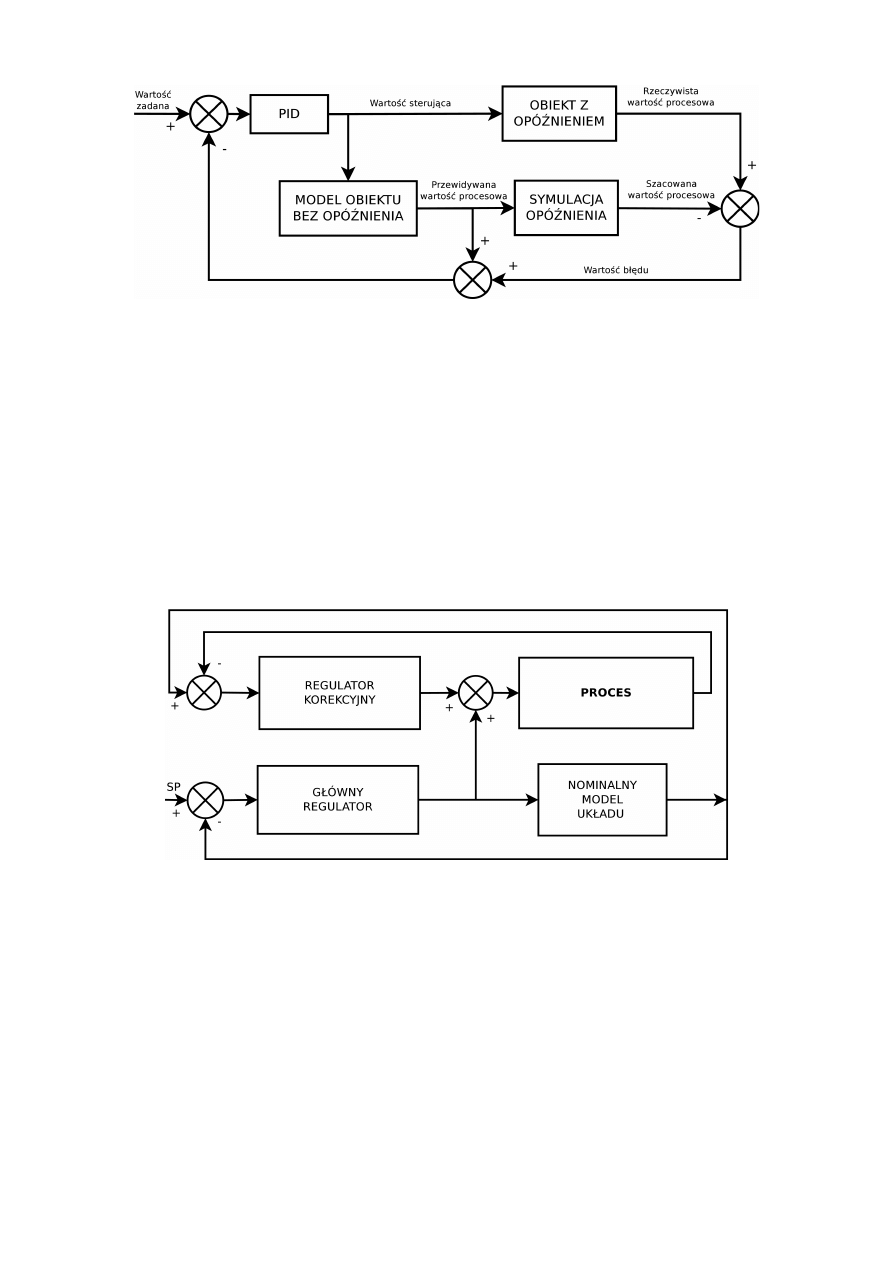
W strukturze predyktora znajduje się gałąź symulująca odpowiedź układu na bieżące
sterowanie, dzięki czemu regulator nie musi czekać na informację zwrotną z obiektu. Wpływ
zakłóceń jest brany pod uwagę poprzez odjęcie od bieżącej wartości procesowej jej obliczonego
odpowiednika i dodanie błędu do wartości przewidywanej.
Układ regulacji z modelem
Układ regulacji z modelem (Model Following Controller) zakłada zmianę parametrów
obiektu w czasie działania. W swojej strukturze posiada on dodatkowy Regulator Korekcyjny
reagujący na te zmiany. Cechą charakterystyczną tego układu regulacji jest to, że proces rzeczywisty
jest sterowany sumą sygnałów regulatora korekcyjnego oraz regulatora głównego. Zaletą tego
rozwiązania jest to że dzięki właściwościom adaptacyjnym nie trzeba znać precyzyjnych wartości
parametrów modelu.
Schemat predyktora Smith'a
Schemat układu regulacji z modelem (MFC)
Klasyfikacja obiektów
Obiekty regulacji klasyfikuje się zwykle ze względu na ich własności dynamiczne.
Podstawowym kryterium podziału obiektów regulacji jest samodzielne osiąganie stanu trwałej
równowagi po wprowadzeniu skokowego wymuszenia sygnału wejściowego. Zgodnie z tym
kryterium rozróżnia się dwie grupy obiektów:
•
Obiekty astatyczne (bez samowyrównania) – wartość ich owpowiedzi skokowej dąży do
nieskończoności, posiadają one właściwości całkujące (np. zbiornik cieczy)
•
Obiekty statyczne (z samowyrównaniem) – dzieli się je na
◦
proporcjonalne–odpowiedź skokowa jest także skokiem, opisuje się je wzmocnieniem K
◦
inercyjne I rzędu – parametr to wzmocnienie oraz stała czasowa T: G s=
K
Ts1
◦
inercyjne I rzędu z opóźnieniem – posiadają opóźnienie T
0
: Gs=
K
Ts1
e
−
T
0
s
◦
inercyjne wyższego rzędu – są złożeniem n układów I rzędu, w praktyce modeluje się je
także jako układ I z opóźnieniem, po wyznaczeniu opóźnienia zastępczego
Metody identyfikacji obiektu
•
badanie charakterystyki czasowej odpowiedzi układu na znany sygnał wejściowy (prostsza
metoda), podać można:
◦
sygnał losowy (stochastyczny)
◦
skok (np. 5>15% zakresu sygnału) , zastosować można aproksymację:
▪
Küpfmüllera – wyznacza parametry modelu inercyjnego I rzędu z opoźnieniem
▪
Strejca – parametry K,T,n oraz τ modelu wyższego rzędu z opóźnieniem o
transmitancji Gs=
K
Ts1
n
e
−
s
◦
impuls (np. w zakresie 1525 %)
•
wyznaczenie charakterystyki częstotliwościowej układu – zbadanie zmian wprowadzanych
przez obiekt w poszczególnych harmonicznych sygnału pobudzającego
•
porównanie z modelem strojonym – jeżeli znana jest klasa modelu do którego należy obiekt,
można manipulować parametrami posiadanego modelu aż do uzyskania jednakowych
odpowiedzi z obiektem
Wyszukiwarka
Podobne podstrony:
1. Zadania i metody automatycznej regulacji, pytania egzamin inżynierski AiR ARS
Automatyczna regulacja zasięgu reflektorów przegląd podzespołów
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
Metody doboru regulatora do UAR
1a zadania matura
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Laboratorium automatyki Regulacja impulsowa
Komputer w układzie automatycznej regulacji (2)
kolokwium2, Zadanie 1A, Zadanie 1
Podstawy automatyki (w 3) regula id 366722
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
10 Automatyka i regulacja automatyczna test
Automatyka i regulacja automatyczna
Konspekt; długość okręgu - zadania, Metodyka, Matematyka-konspekty
Czujnik poziomu zawieszenia w samochodach z automatyczną regulacją zasięgu reflektorów przód
Automatyka Układ automatycznej regulacji w silnikach prądu stałego
automatyka regulator pid nr 1
więcej podobnych podstron