
Systemy wbudowane
Opracowanie pytao
By
MC_OMEN
1. Podad definicję systemu wbudowanego
System wbudowany jest to system komputerowy specjalnego przeznaczenia, który staje się integralną częścią
obsługiwanego przez niego sprzętu.
System wbudowany spełnia określone wymagania, zdefiniowane do zadao które ma wykonywad. Nie można nim więc
nazywad typowego wielofunkcyjnego komputera osobistego. Każdy system wbudowany oparty jest na mikroprocesorze
(lub mikrokontrolerze), zaprogramowanym do wykonywania ograniczonej ilości zadao lub nawet tylko do jednego.
2. Jakie są cechy charakterystyczne dla systemów wbudowanych
Silnie zintegrowany
Niezawodnośd
Trwałośd
Niski pobór energii
Bezobsługowośd
Odpornośd mechaniczna na trudne warunki zewnętrzne
Minimalistyczny lub brak GUI
3. Podaj kilka przykładów systemów wbudowanych.
Telefon komórkowy (PDA, GPS )
TV, DVD, PVR, router, punkt dostępowy WLAN
Sprzęt AGD – pralka, zmywarka, lodówka, odkurzacz
Obrabiarki numeryczne, sterowniki przemysłowe, zautomatyzowane linie produykcyjne
Motoryzacja (ABS, sterowanie silnikiem, multimedia)
Lotnictwo, przemysł kosmiczny – satelity, kontrolery statków kosmicznych
Przemysł militarny
4. Podad podział systemów komputerowych ze względu na architekturę pamięci
Von Neumann - Architektura ta zakłada, że podział przestrzeni adresowej na pamięd programu i pamięd danych jest
czysto umowny. Takie podejście charakteryzuje się prostotą i przejrzystością. Upraszcza to proces pisania programów,
gdyż dostęp do danych programu i do rozkazów odbywa się za pomocą tych samych instrukcji i tych samych trybów
adresowania. Wada - spowolnienie wykonywania cyklu.
Architektura Harwardzka -wykorzystuje dwie szyny adresowe. Jedna dedykowana jest dla kodu programu, druga dla
danych.
Zmodyfikowana architektura harwardzka jest rozwiązaniem pośrednim. Próbuje połączyd pozytywne cechy obu
wcześniej wymienionych. Obszary pamięci RAM i ROM są rozdzielone ale charakteryzują się taką samą długością słowa.
5. Podad podział procesorów ze względu na rodzaj instrukcji
CISC – Complex Instruction Set Computer
duża liczba rozkazów
mała optymalizacja cyklów zegarowych - potrzebują dużej liczby cykli procesora do wykonania
występowanie złożonych, specjalistycznych rozkazów
duża liczba trybów adresowania
każda instrukcja może wykonad kilka operacji niskiego poziomu jak np. pobranie z pamięci, operacje arytmetyczną i
zapis do pamięci zawarte w 1 instrukcji.
RISC – Reduced Instruction Set Computer
zredukowana ilośd rozkazów do minimum
zbiór instrukcji jest ograniczony i spełnia warunki ortogonalności
zmniejszona liczba trybów adresowania
występuje przy architekturze harwardzkiej
wszystkie rozkazy wykonują się w 1 cyklu maszynowym -> dzięki temu możliwe jest zastosowanie przetwarzania
potokowego
6. Jakie procesory nazywany ortogonalnymi ?
Takie gdzie każda instrukcja może operowad na dowolnym rejestrze roboczym, każda instrukcja może wykorzystywad
dowolny tryb adresowania, nie ma ukrytych związków między instrukcjami, dodatkowo kody rozkazów i formaty
instrukcji są zunifikowane. Ortogonalnośd zbioru instrukcji przyczynia się do uproszczenia budowy układu sterowania,
który może dzięki temu realizowad wykonywanie każdego rozkazu według identycznego algorytmu i do tego znacznie
szybciej.
Czyli RISC.
7. Co to jest mikrokontroler, czym się wyróżnia ?
Mikrokontroler = Mikroprocesor + RAM + ROM + peryferia
Tak więc jest on zdolny do autonomicznej pracy i nie potrzebuje na dobrą sprawę nic prócz napięcia zasilania do
działania.
Mikrokontrolerem nazywamy układ scalony z wyspecjalizowanym mikroprocesorem, spełniający
dwa kryteria:
• jest zdolny do autonomicznej pracy
• został zaprojektowany do pracy w systemach kontrolno - pomiarowych
8. Podad podstawowe elementy składowe każdego mikrokontrolera.?
Szyna adresowa
Szyna danych
Szyna sterująca
Jednostka centralna
Pamięd : danych i programu (opcjonalnie EEPROM)
Urządzenia peryferyjne
9. Z jakich elementów składowych zbudowana jest jednostka centralna mikrokontrolera ?
o blok przetwarzający instrukcje
o własna pamięd
o oscylator i układ dystrybucji sygnałów zegarowych,
o układ resetu (często bardzo rozbudowany),
o układy nadzorujące (często uważane za układy peryferyjne),
o system przerwao.
10. Co oznacza termin ISP ?
In-System Programming
In-System Programming lub ISP – rozwiązanie konstrukcyjne stosowane w mikrokontrolerach i układach PLD
umożliwiające zaprogramowanie układu bez demontażu z urządzenia w którym pracuje.

11. Jakie rodzaje pamięci spotyka się w układach mikrokontrolerów ?
Pamięd programu (zawierająca kod programu, tablice stałych, wektor resetu i wektory przerwao),
Pamięd danych (przechowująca zmienne),
Stos sprzętowy (procedury obsługi przerwao i wywołania funkcji odkładają na niego aktualny stan procesora i po
zakooczeniu działania „zdejmują” go),
Pamięd EEPROM (przechowuje zmienne lub tablice stałych, które po wyłączeniu zasilania nie mogą ulec skasowaniu).
W zależności od typu, mikrokontroler wyposażony jest w różne typy wbudowanej pamięci wewnętrznej:
Pamięd RAM (ang. Random Access Memory)
Pamięd ROM (ang. Read-Only Memory)
pamięd EPROM (ang. Erasable Programmable ROM)
Pamięd OTP (ang. One Time Programmable)
Pamięd EEPROM (ang. Electrically Erasable PROM)
Pamięd FLASH (ang. bulk erasable non-volatile memory)
12. Co to jest akumulator ?
Jest to wyspecjalizowany rejestr procesora, w którym umieszczane są wyniki operacji jednostki arytmetycznologicznej
procesora.
13. Omówid sposób działania stosu ?
Jest to liniowa struktura danych, w której dane dokładane są na wierzch stosu i z wierzchołka stosu są pobierane (bufor
typu LIFO, Last In, First Out; ostatni na wejściu, pierwszy na wyjściu).
14. Co to jest rejestr wskaźnikowy ? Do czego się go używa ?
Po wykonaniu operacji jednostka ALU generuje wynik, natomiast pewne specyficzne informacje typu: wynik równy zeru,
przeniesienie, pożyczka, przepełnienie, znak wyniku, parzystośd są przechowywane w rejestrze wskaźników. Rejestr
wskaźników zwany jest też często rejestrem stanu. Za pomocą specjalnych instrukcji możliwe jest testowanie stanu
poszczególnych bitów rejestru wskaźnikowego i stosowanie w programie rozgałęzieo.
15. Do czego służy wskaźnik instrukcji ?
Wskaźnik instrukcji jest rejestrem procesora przechowującym informację o tym, w którym miejscu sekwencji instrukcji
znajduje się aktualnie procesor. W zależności od modelu procesora w rejestrze tym przechowywany jest adres aktualnie
wykonywanej lub częściej następnej instrukcji. W tym drugim wypadku licznik programu jest zwiększany zaraz po
odebraniu instrukcji i przeniesieniu jej do rejestru instrukcji. Poprzez modyfikację tego rejestru implementuje się skoki, w
tym skoki warunkowe, pętle i podprogramy.
16. Co to są architektury superskalarne ?
Są to architektury mające na celu poprawę efektywności pracy poprzez zastosowanie większej ilości jednostek
arytmetycznologicznych. Tak więc stan procesora nie jest opisywany przez skalar ale przez wektor (superskalar) [
równoległe wykonywanie ]
17. Omówid wybrany tryb adresowania pamięci w mikrokontrolerach .
Sposób dostępu jc do argumentów zależy od trybu adresowania. Przez tryb adresowania
rozumie się sposób wskazywania na argumenty wykorzystywane w trakcie wykonania
instrukcji. Do najważniejszych trybów adresowania można zaliczyd:
implikowane, zwane też wewnętrznym lub rejestrowym (inherent, register),
natychmiastowe (immediate),
bezpośrednie (direct),
indeksowe (indirect),
względne (relative).
Adresowanie implikowane dotyczy jednobajtowych instrukcji, dla których zarówno operand jak i miejsce przeznaczenia
wyniku są określone przez słowo rozkazowe. Tryb ten używany jest wyłącznie w odniesieniu do wewnętrznych rejestrów
jc, w tym przede wszystkim do akumulatora. Np. ADD A,R1, INC A, CPL A, NOP.
Adresowanie natychmiastowe – operand (argument) jest podany w jawnej postaci w kodzie instrukcji. Tryb ten może
byd używany wyłącznie w odniesieniu do stałych zapisanych w kodzie programu. Np. ADD A,#dana, MOV A,#0F3h.
Adresowanie bezpośrednie odnosi się do instrukcji wielobajtowych, w których po kodzie rozkazu następuje adres
argumentu umieszczonego w pamięci danych (komórki pamięci RAM). Np. ADD A,adres, MOV A,0F8h.
Adresowanie indeksowe polega na obliczeniu adresu przez sumowanie zawartości specjalnie przeznaczonego do
indeksowania rejestru, nazywanego rejestrem indeksowym, z adresem bezpośrednim, zapisanym w instrukcji (lub
odwrotnie – wówczas mówi się o adresowaniu bazowym). Obliczony w ten sposób adres fizyczny pamięci bywa
nazywany adresem efektywnym (rys. 2.3). Adresowanie to jest szczególnie użyteczne przy operowaniu na blokach
danych. Umieszczając w instrukcji adres początku bloku danych można uzyskad wygodny dostęp do kolejnych bajtów
danych przez tylko samą zmianę zawartości rejestru indeksowego.
Adresowanie pośrednie ma miejsce, gdy częśd adresowa instrukcji wskazuje na komórkę pamięci zawierającą adres
efektywny. Odmianą tego adresowania jest adresowanie zawartością rejestrów (pointer addressing), w którym adres
efektywny jest zawarty w przeznaczonym do tego celu rejestrze lub parze rejestrów mk. W tym przypadku identyfikacja
tych rejestrów odbywa się na podstawie słowa rozkazowego. Np. MOV A, @R1, ADD A,@R0, MOVX A, @DPTR.
Adresowanie względne służy do adresowania pamięci względem adresu aktualnie wykonywanej instrukcji w pamięci
programu. Adres ten jest przechowywany w specjalnie do tego celu przeznaczonym rejestrze, nazywanym licznikiem
programu PC (program counter), licznikiem rozkazów lub wskaźnikiem instrukcji IP (instruction pointer). Adres
efektywny jest obliczany jako suma zawartości licznika programu i adresu względnego, gdzie adres względny (relative
address), będący argumentem instrukcji, np. zawarty jest w zakresie [-128,+127]. Np. JNB adresbitu,etykieta - JNB
P0.1,LOOP.
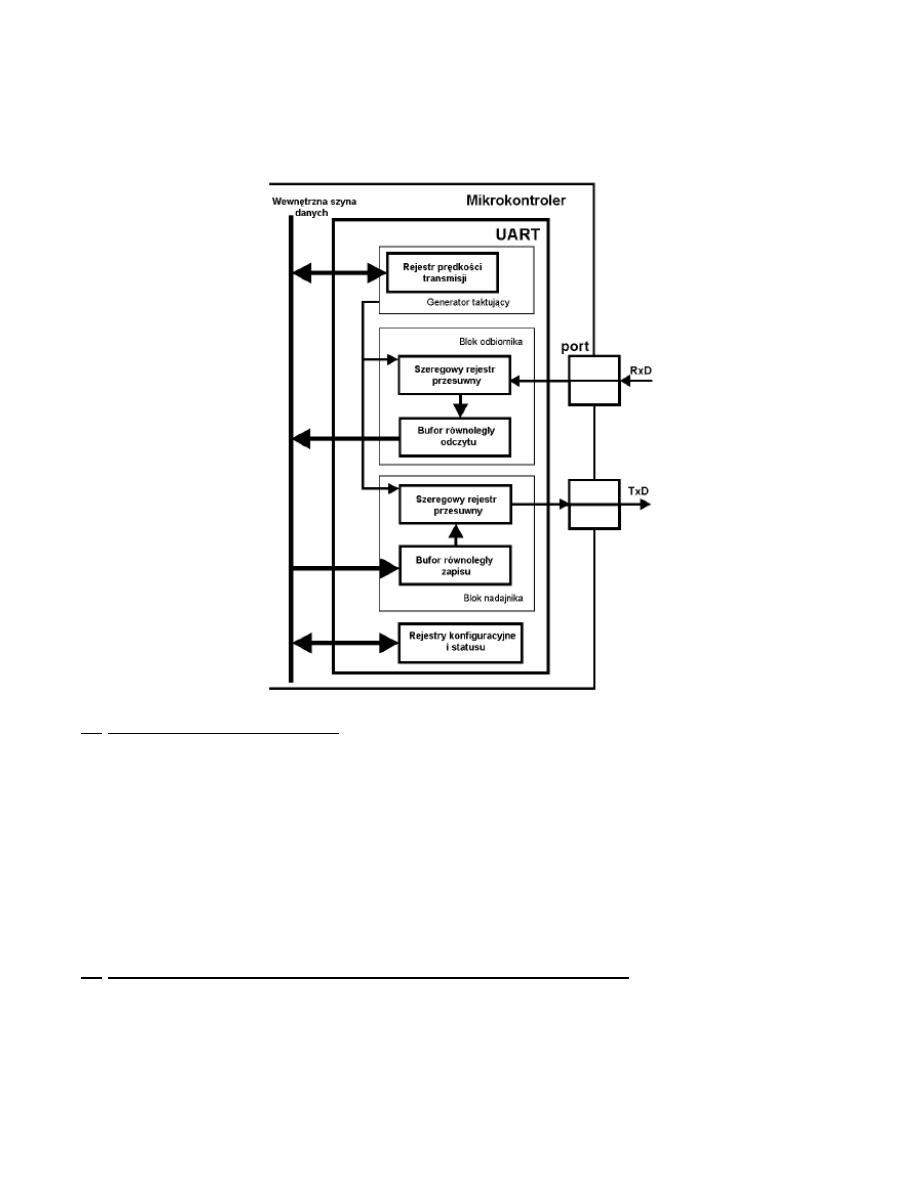
18. Podad typowe układy peryfreyjne spotykane w mikrokontrolerach . Omówid wybrany.
Układy nadzorujące
Watchdog
LVD, CSS
Układy czasowe:
Timers/Counters
PWM
RTC
Captures
Sterowniki komunikacji szeregowej
UART, IrDA
SPI, QSPI
1-Wire
I2C
CAN
USB
MII i ethernet PHY
Łącza równoległe
Ports
Slave port
Układy specjalizowane
A/D Comparators
Analog Comparators
C/A Converters
EEPROMs
UART ma wejście odbiornika (RxD) i wyjście (TxD), jest interfejsem asynchronicznym i dwukierunkowym, najczęściej
posiada swój własny generator taktujący.
19. Podad i omówid rodzaje przerwao
Przerwanie jest to sygnał, który powoduje zawieszenie aktualnie wykonywanego programu i zapamiętanie jego stanu
oraz przejście do wykonywania programu obsługi przerwania.
Rodzaje przerwao:
wewnętrzne – generowane dla poinformowaniu o zajściu pewnych zdarzeo wewnątrz JC. Najczęściej zdarzenia
te mają charakter błędów (np. błąd nadmiaru arytmetycznego, błąd parzystości pamięci, próba wykonania
nielegalnego rozkazu, błąd ochrony pamięci);
zewnętrzne – związane ze zmianą stanu urządzeo zewnętrznych;
programowe – makroinstrukcje. Wykonanie rozkazu przerwania powoduje przejście do programu
umieszczonego w pamięci operacyjnej realizującego treśd makroinstrukcji.
20. Wskazad na metody obniżania poboru mocy w układach mikrokontrolerów .
Techniki redukcji:
Elastyczne sterowanie szybkością pracy w zależności od aktualnych potrzeb, gdyż zależnośd poboru mocy
układów CMOS zależy od częstotliwości pracy. Służy do tego sied dystrybucji sygnałów zegarowych w mk
Zastosowanie 2 oscylatorów. Jeden pracuje z maksymalną częstotliwością, drugi z niską. Przejście z wysokiej do
niskiej częstotliwości powoduje spadek pobieranej mocy o 3 rzędy
Specjalne tryby pracy mk:
tryb pełnej aktywności (RUN)
tryb uśpienia (pracują wszystkie urządzenia peryferyjne, procesor nie) (WAIT lub SLEEP)
tryb, w którym nie pracuje procesor, a pracują niektóre urządzenia peryferyjne
tryb pełnego wstrzymania pracy mk (zamrożenia) (STOP lub HALT)
21. Podad transmitancję operatorową układu proporcjonalnego idealnego.
( )
22. Podad przykład obiektu całkującego
W układach dynamicznych człony całkujące - czyli elementy całkujące (integratory) - zachowują się jak elementy
magazynujące (przykładem tu mogą byd: sprężyna albo kondensator, które magazynują na przykład energię potencjalną
czy kinetyczną). Integratory w ciągłych układach sterowania służą jako urządzenia zapamiętujące dlatego sygnały
wyjściowe takich integratorów mogą byd rozważane jako zmienne, które definiują wewnętrzny stan układu.
( )
23. Transmitancja i sposób działania regulatora PID.
Regulator proporcjonalno-całkujący-różniczkujący – PID
( )
(
)
( )
(
)
Na podstawie takiego regulatora przy odpowiednim doborze stałych czasowych możemy otrzymad P, PD, PI ; )
Regulator PID (ang. proportional-integral-derivative controller – regulator proporcjonalno-całkująco-różniczkujący) – w
automatyce, regulator składający się z członu proporcjonalnego P o wzmocnieniu kp, członu całkującego I o czasie
zdwojenia Ti oraz członu różniczkującego D o czasie wyprzedzenia Td. Jego celem jest utrzymanie wartości wyjściowej na
określonym poziomie, zwanym wartością zadaną.
Regulatora PID używa się np. do sterowania temperaturą procesu, w tym wypadku działa on jak bardzo dokładny
termostat. Może również sterowad ciśnieniem, natężeniem przepływu, składem chemicznym, siłą, prędkością i innymi
sygnałami. Regulatory znajdują zastosowanie w przemyśle samochodowym, w tym przypadku ich zadaniem jest
utrzymywanie stałej prędkości samochodu bez względu na warunki jazdy (tzw. tempomat).
Pragmatyka doboru typu regulatora :
Działanie różniczkujące zwiększa pasmo przenoszenia układu – wprowadza dodatnie przesunięcie fazowe
Działanie całkujące wprowadza ujemne przesunięcie fazowe i zmniejsza pasmo przenoszenia układu
Działanie całkujące zwiększa rząd astatyzmu układu
24. Podad jak dobrad parametry regulatora PID tak aby był on regulatorem PI (PD, P)
( )
(
)
PI :
PD :
P :
25. Jakie elementy należy rozważyd przy dobieraniu regulatora ?
pasmo przenoszenia: PD zwiększa, PI zmniejsza
przesunięcie fazowe: PD wprowadza dodatnie, PI ujemne
rząd astatyzmu układu: PI zwiększa
26. Jak dobiera się rodzaj regulatora ?
W zależności od tego co chcemy uzyskad, ale najlepiej i tak dobrad PID
27. Wyprowadzid równanie dla dyskretnej realizacji regulatora PID
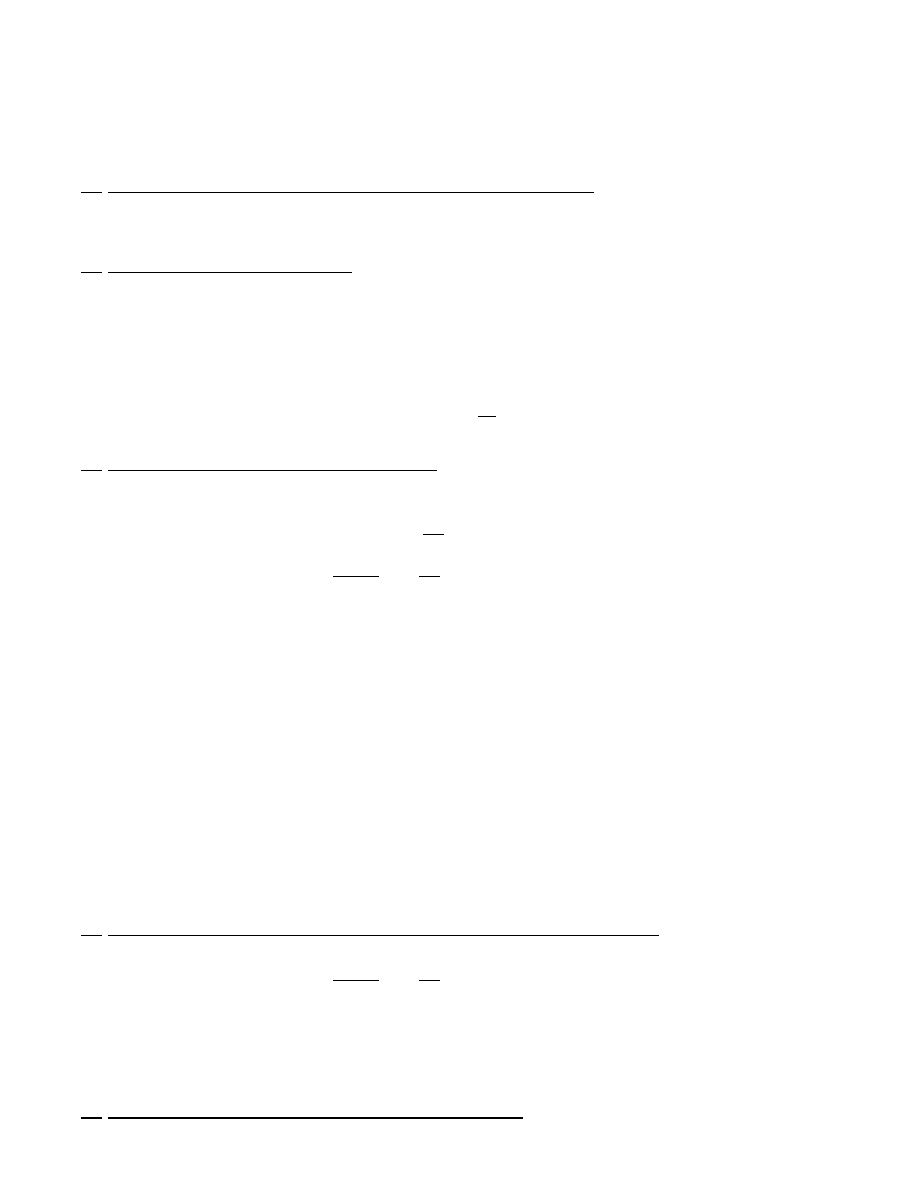
28. Na czym polega sterowanie w układzie otwartym ?
Sterowanie w układzie otwartym - Proces sterowania wymaga wyznaczenia takich wielkości sterujących, aby osiągnąd
oczekiwane wartości wielkości sterowanych. Takie sterowanie jest charakterystyczne dla systemów, w których efekty
oddziaływao nie są natychmiast widoczne (systemy gospodarcze, społeczne, środowiskowe). W takich przypadkach
oczekiwanie na efekty sterowania może byd bardzo długie. Takie sterowanie nazywa się sterowaniem w układzie
otwartym.
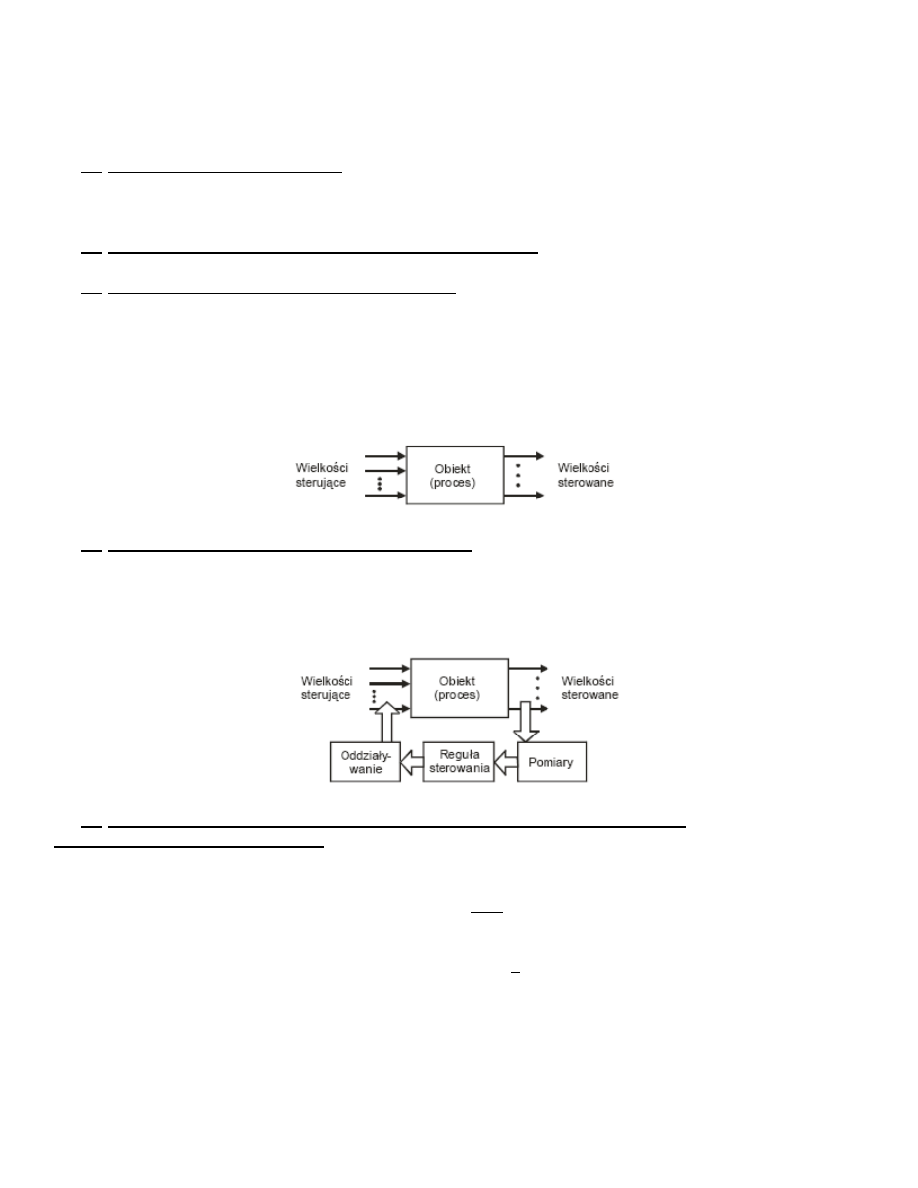
29. Na czym polega sterowanie w układzie zamkniętym ?
Jeżeli ograniczymy nasze rozważania do systemów technicznych, w których możemy zaobserwowad efekty
oddziaływania na proces i „na bieżąco” korygowad oddziaływanie, to wówczas mówimy o sterowaniu w układzie
zamkniętym. Mamy wówczas do czynienia z tak zwaną pętlą sterowania lub ze sprzężeniem zwrotnym.
30. Co to jest transmitancja operatorowa, odpowiedź impulsowa, odpowiedź skokowa ,
charakterystyka amplitudowo fazowa ?
Transmitancja :
( )
( )
( )
Odpowiedź skokowa :
( ) ( )
I to do dziedziny czasu
Odpowiedź impulsowa
( ) ( )
Podobnie, do dziedziny czasu
Charakterystyką amplitudowo-fazową układu nazywamy wykres transmitancji widmowej tego
układu na płaszczyźnie zmiennej zespolonej.
( ) ( ) ( )
Charakterystyką amplitudową układu nazywamy zależnośd modułu transmitancji widmowej G(jω) w funkcji pulsacji ω.
| ( )|
Charakterystyką fazową układu nazywamy zależnośd argumentu transmitancji widmowej φ(jω) od
pulsacji ω.
( ( ))
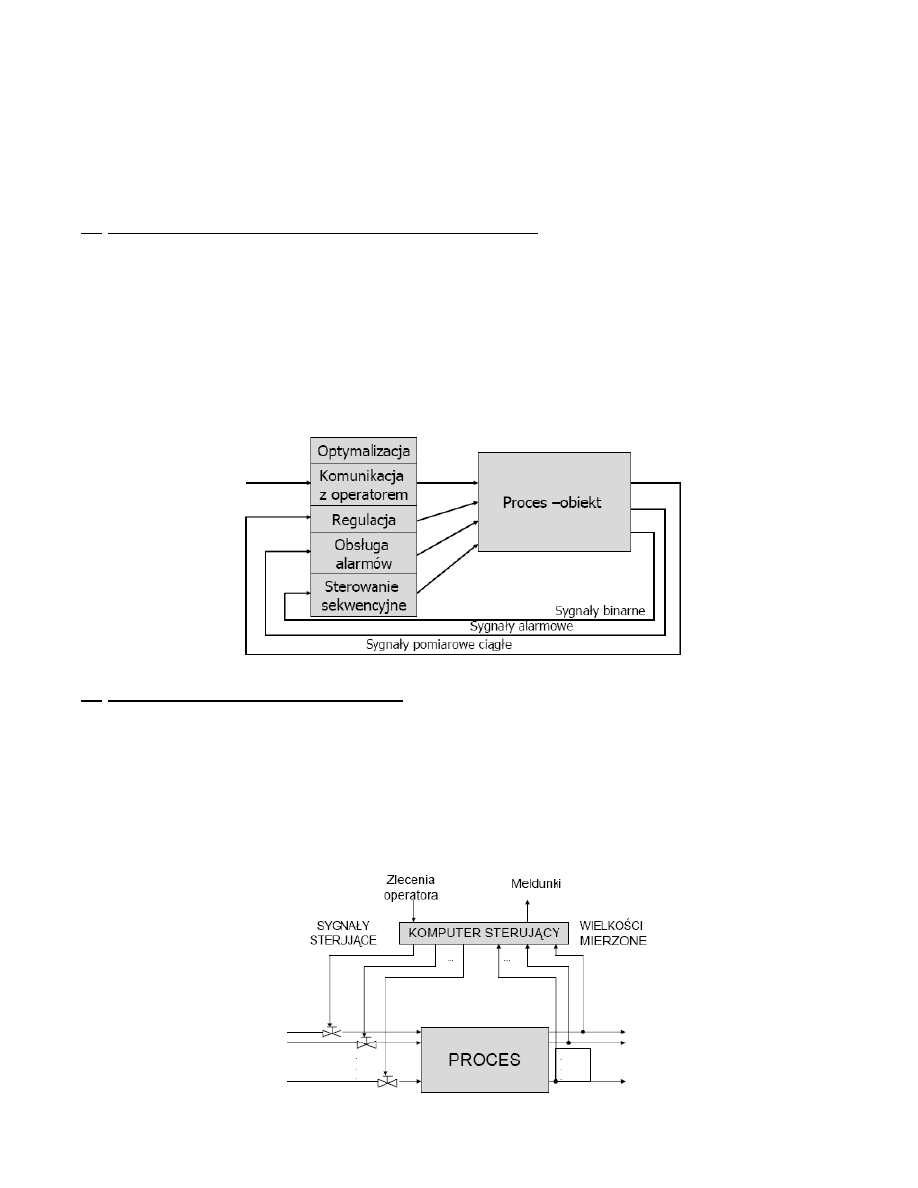
31. Wskazad typowe zadania komputera jako jednostki sterującej .
zbieranie wartości zmiennych procesowych
analiza i dokumentacja przebiegu procesu
przetwarzanie zbieranych zmiennych na ecyzje
zapewniające osiągnięcie celu procesu
wypracowanie decyzji i oddziaływanie na proces
realizacja łączności: operator – proces
testowanie poprawności funkcjonowania własnych układów
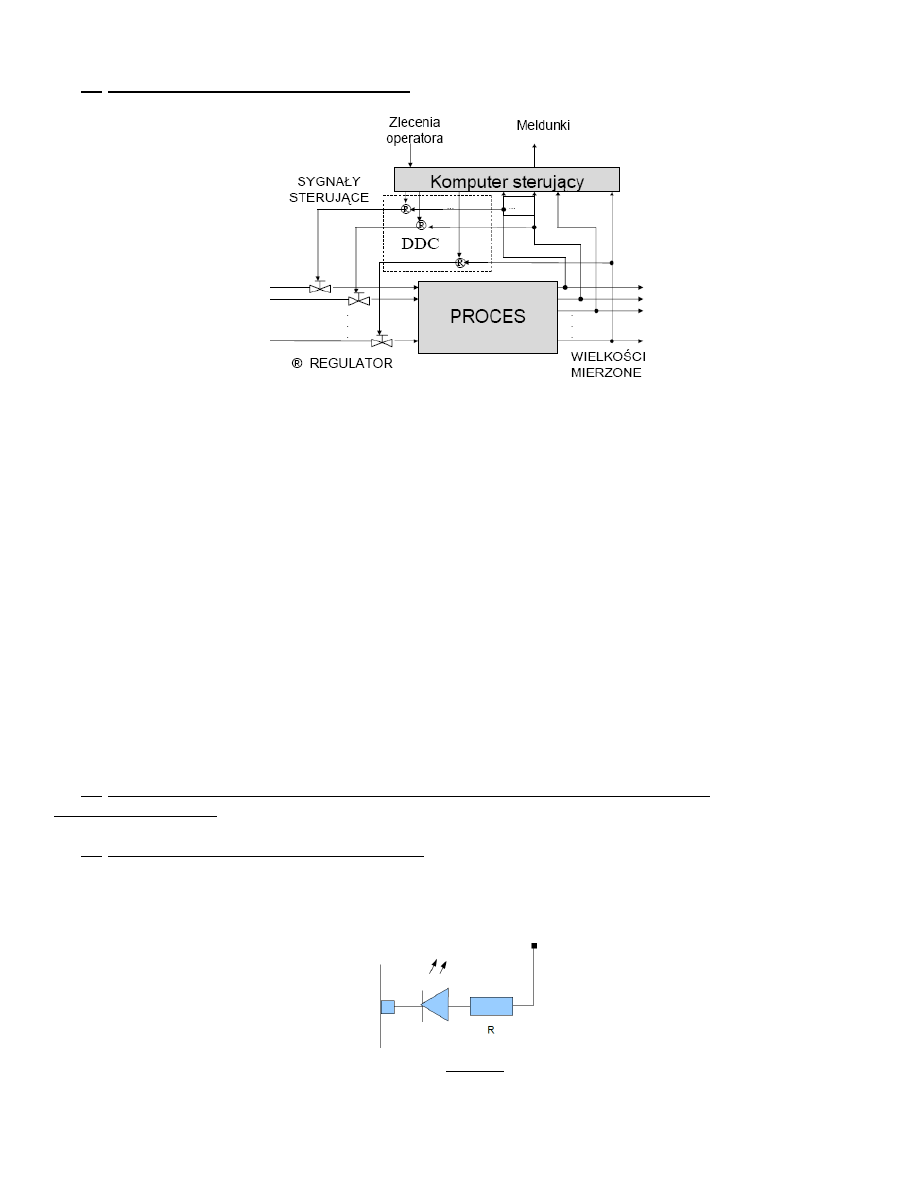
32. Na czym polega sterowanie bezpośrednie ?
Sygnał wejściowy doprowadzany do jednostki centralnej podlega następującym operacjom obliczeniowym:
wartośd zmierzona przekształcana jest w Algorytmie przekształcenia w taki sposób, aby liczbowo reprezentowała
wielkośd regulowaną w jednostkach technicznych,
w oparciu o pamiętaną wartośd zadaną i zmierzoną wartośd regulowaną wyznaczany jest uchyb regulacji
na podstawie wartości uchybu wyznaczana jest nowa wartośd sygnału sterującego w tzw. Algorytmie sterowania
Sygnał sterujący wysyłany jest do obiektu w odpowiednim momencie czasu zwanym chwilą impulsowania.
33. Co to jest system sterowania nadrzędnego ?
System sterowania nadrzędnego (ang. SPC - SuPervisor Control) rodzaj systemu sterowania, w którym komputer
odgrywa rolę nadrzędnego regulatora w stosunku do układów regulacji bezpośredniej. Systemy te mają strukturę
bardziej "otwartą" niż systemy DDC.
System sterowania nadrzędnego może byd rozwijany na bieżąco na podstawie aktualnie zbieranych doświadczeo
dotyczących sterowania obiektem. W zakresie funkcji sterowniczych systemy SPC są zdecydowanie bogatsze i wymagają
sprzętu o lepszych parametrach użytkowych. Oprogramowanie systemów SPC wykorzystuje informacje, które można
podzielid na następujące kategorie:
program i stałe związane z programem,
bieżące polecenia kierownictwa,
informacje o bieżących stanach lub położeniach elementów nastawczych,
dane dotyczące poprzednich wartości wielkości regulowanych,
dane o stanach elementów nastawczych w przeszłości.
W zakresie obliczeo w systemie są realizowane następujące funkcje:
wnioskowanie o bieżących wartościach zmiennych procesowych, których nie można bezpośrednio zmierzyd,
procedury obliczeniowe dotyczące sterowania,
zestawienie danych i dokumentacja procesu.
34. Omówid strukturę systemu typu Simplex/ simplex z procesorem we/wy / master-slave /
redundantne / sieciowe
35. Podad poznane sposoby sterowania diodą LED
Porty o dużej wydajności prądowej :
Sink :
– projektowany prąd diody, z reguły 2-20 mA
‘0’ logiczne – dioda świeci
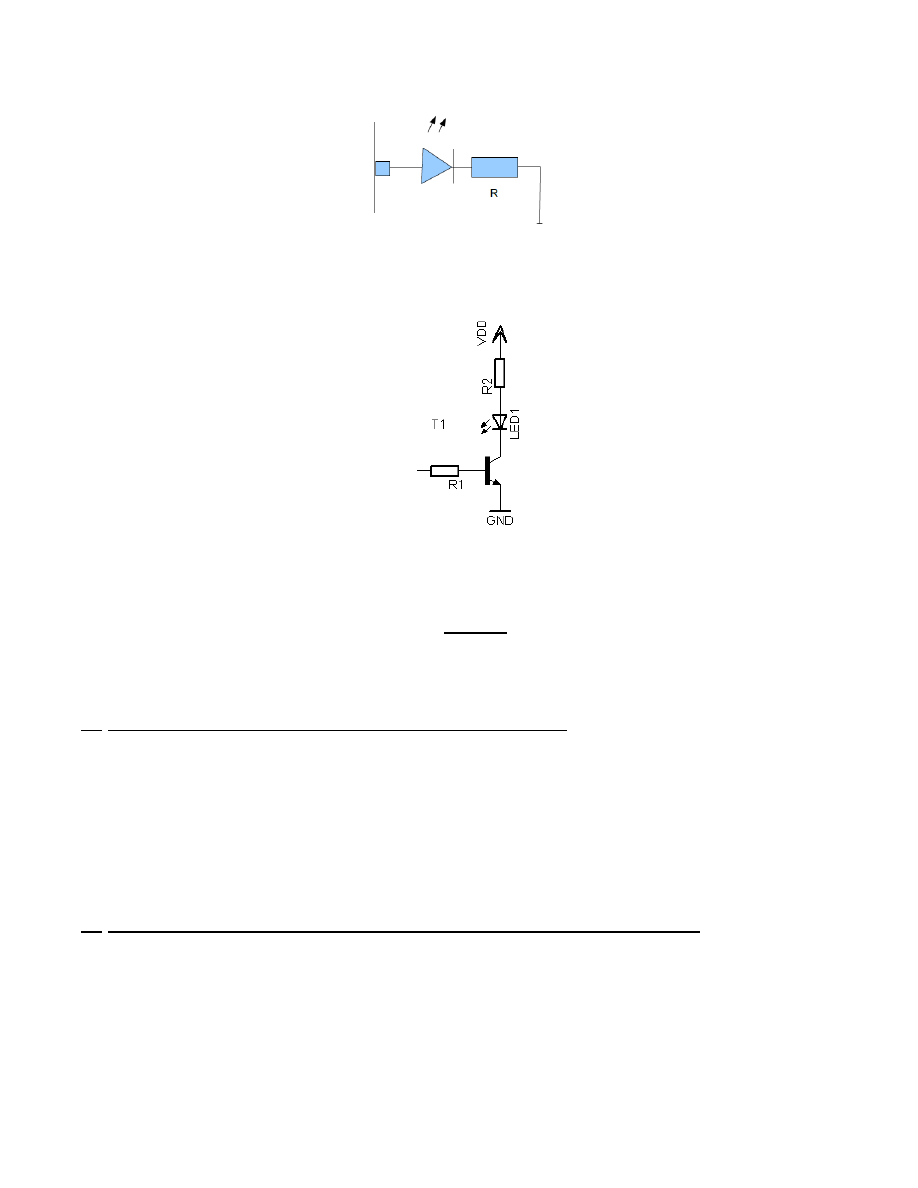
Source :
‘1’ logiczne – dioda świeci
Porty o małej wydajności prądowej :
R1- wartośd ograniczająca prąd bazy T1 – ale pozwalająca na jego nasycenie gdy sterowany
stanem wysokim. W praktyce – pomiędzu 1kΩ a 10kΩ
T1 – tranzystor małej mocy
‘1’ – dioda się świeci
36. Na czym polega multipleksowane sterowanie wyświetlaczem LED ?
Multipleksowanie, czyli naprzemienne korzystanie z wyprowadzeo za pomocą tranzystorów kluczujących. Potrzeba 8
wyprowadzeo sterujących segmentami i po jednym na każdą dodatkową cyfrę wyświetlacza. Do wszystkich wyświetlaczy
doprowadzany jest taki sam sygnał. Jak to ma działad? Przy sterowaniu wyświetlaczami poprzez multipleksowanie
mikrokontroler lub inny sterownik zapala w danym momencie tylko jeden wyświetlacz poprzez klucz tranzystorowy
odcinający lub podający zasilanie. Podczas przełączania powinny zostad również zostad zmienione sygnały podawane do
segmentów. Dzięki temu trickowi chod wyświetlacze świecą się naprzemiennie to na każdym z nich może byd
wyświetlana inna treśd, a dzięki odpowiedniej częstotliwości ludzkie oko tego nie dostrzega.
37. Dlaczego na układzie sterowania przekaźnika równolegle do cewki znajduje się dioda ?
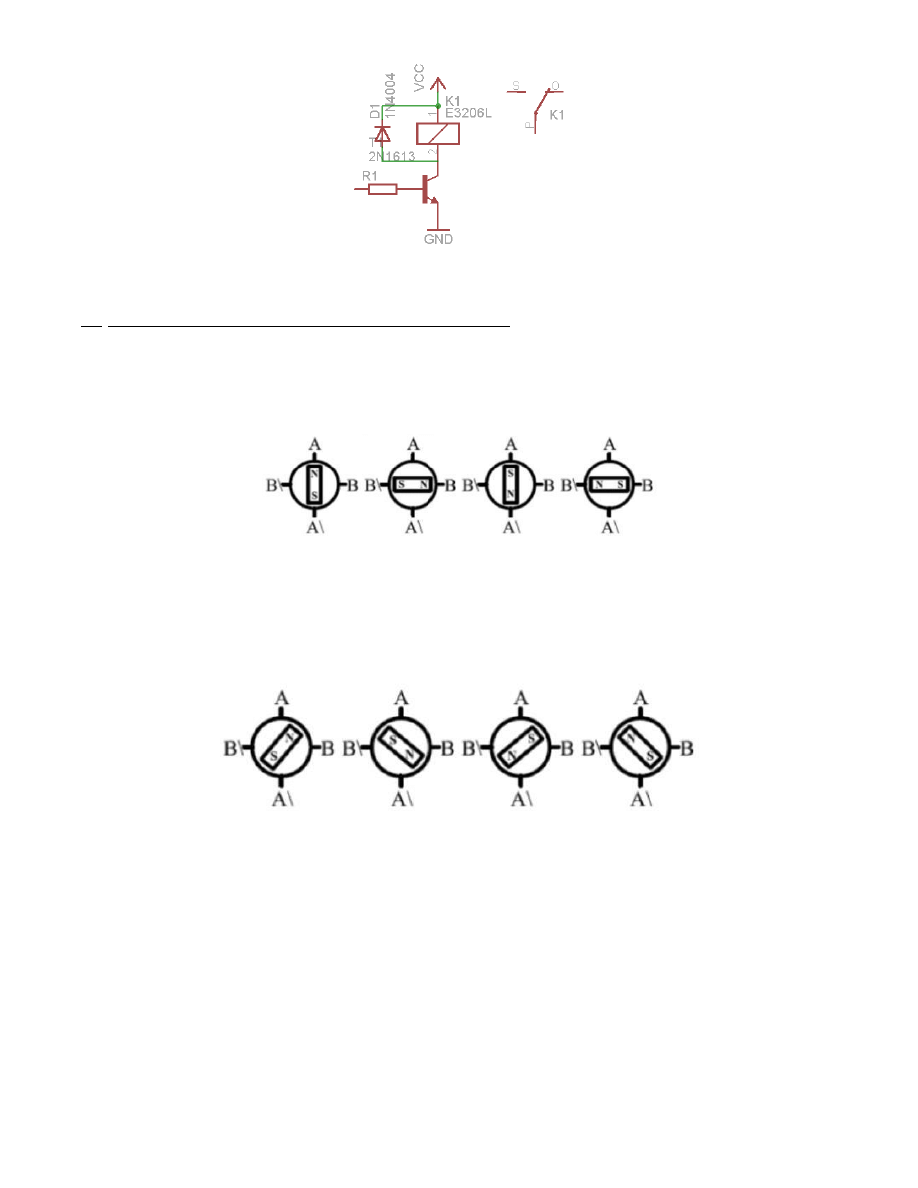
W trakcie rozłączania napięcie na cewce przekaźnika zmienia znak i w przypadku braku D1 doprowadzi do uszkodzenia
T1.
38. Podad rodzaje i sposoby sterowania silnikami krokowymi ?
Sterowanie falowe
W sterowaniu falowym inaczej zwanym jednofazowym w danym momencie zasilana jest jedna
faza. Kolejnośd ich pracy jest następująca A-B-A’-B’. Wynikiem tego rodzaju sterowania jest
wykonanie pełnego kroku.
Sterowanie pełnokrokowe
W sterowaniu dwufazowym inaczej pełnokrokowym w każdej chwili czasu zasilane są dwie fazy.
Kolejnośd pracy opisuje się jako AB-A’B-A’B’-AB’.
Wynikiem tego rodzaju sterowania są takie same ruchy jak przy sterowaniu jednofazowym z tym, że pozycja wirnika jest
przesunięta o pół kroku.
Jednak dzięki temu, że jednocześnie pracują dwie fazy silnik uzyskuje dwukrotnie większy moment w porównaniu do
sterowania jednofazowego będący odpowiednikiem 50% całkowitego uzwojenia silnika.
Sterowanie półkrokowe
Sterowanie półkrokowe jest kombinacją sterowania dwufazowego i jednofazowego. Stojan zasilany jest naprzemiennie
na jedną, a następnie dwie fazy. Daje to w efekcie dwukrotnie krótszy krok.
Pozwala to na wyeliminowanie w dużym stopniu największej słabości pozostałych dwóch rodzajów pracy, efektu
rezonansu mechanicznego silnika w trakcie pracy.
Schemat pracy w trybie półkrokowym opisuje się kolejno AB-B-A’B-A’-A’B’-B’-AB’-A.
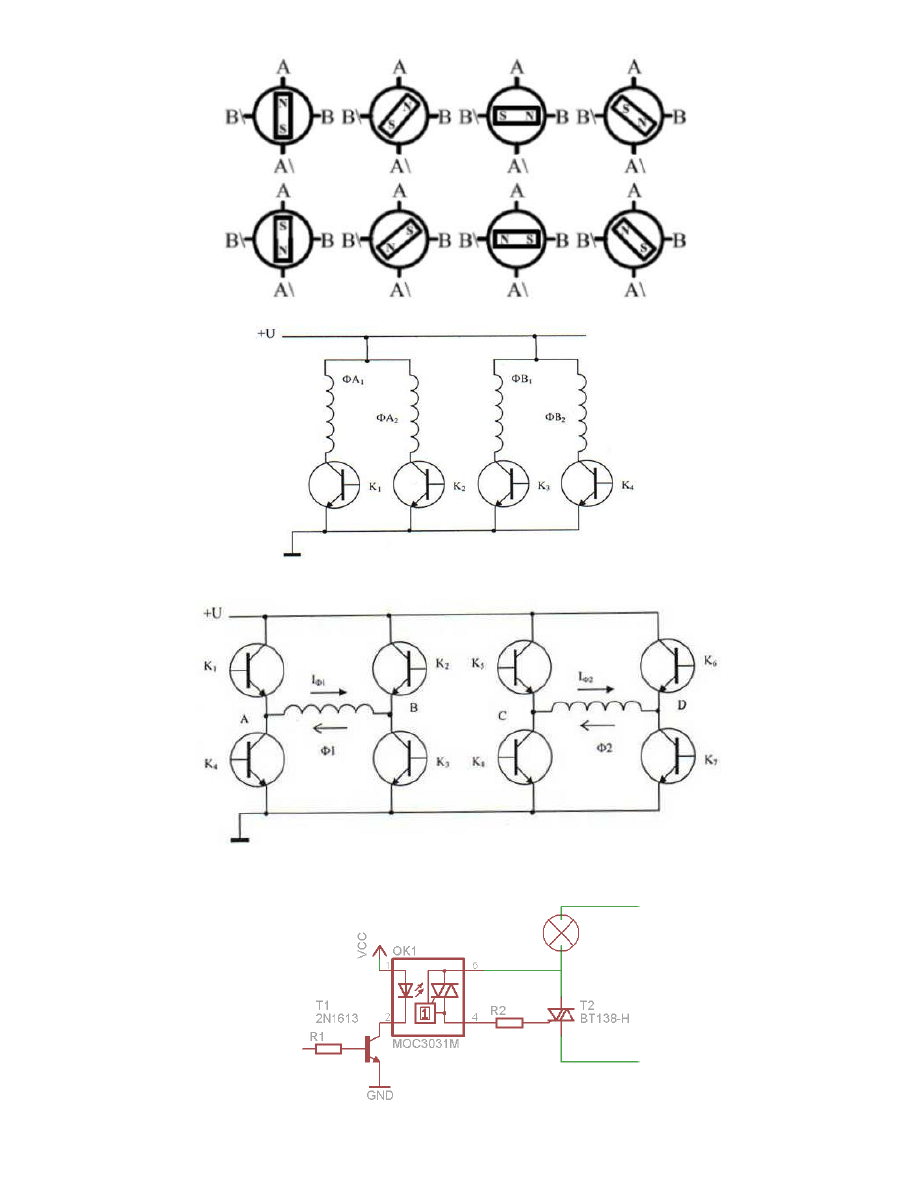
Silnik unipolarny 4-fazowy
Silnik unipolarny 2-fazowy
Sterowanie triakiem
39. Jakie są zalety i wady stosowania silników krokowych ?
Zalety:
kąt obrotu silnika jest proporcjonalny do ilości impulsów wejściowych,
silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są zasilane),
precyzyjne pozycjonowanie i powtarzalnośd ruchu - dobre silniki krokowe mają dokładnośd ok. 3 - 5% kroku i
błąd ten nie kumuluje się z kroku na krok,
możliwośd bardzo szybkiego rozbiegu, hamowania i zmiany kierunku,
niezawodne - ze względu na brak szczotek. żywotnośd silnika zależy zatem tylko od żywotności łożysk,
zależnośd obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli otwartej, przez co silnik
krokowy jest łatwiejszy i taoszy w sterowaniu,
możliwośd osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem umocowanym
bezpośrednio na osi,
szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkośd jest proporcjonalna do częstotliwości
impulsów wejściowych,
jedną z najbardziej znaczących zalet silnika krokowego jest możliwośd dokładnego sterowania w pętli otwartej.
Praca w pętli otwartej oznacza, że nie potrzeba sprzężenia zwrotnego - informacji o położeniu. Takie sterowanie
eliminuje potrzebę stosowania kosztownych urządzeo sprzężenia zwrotnego, takich jak enkodery
optoelektroniczne. Pozycje znajduje się zliczając impulsy wejściowe.
Wady:
rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu,
trudności przy pracy z bardzo dużymi prędkościami.
występuje zjawisko gubienia kroków
duży pobór prądu
duża emisja ciepła
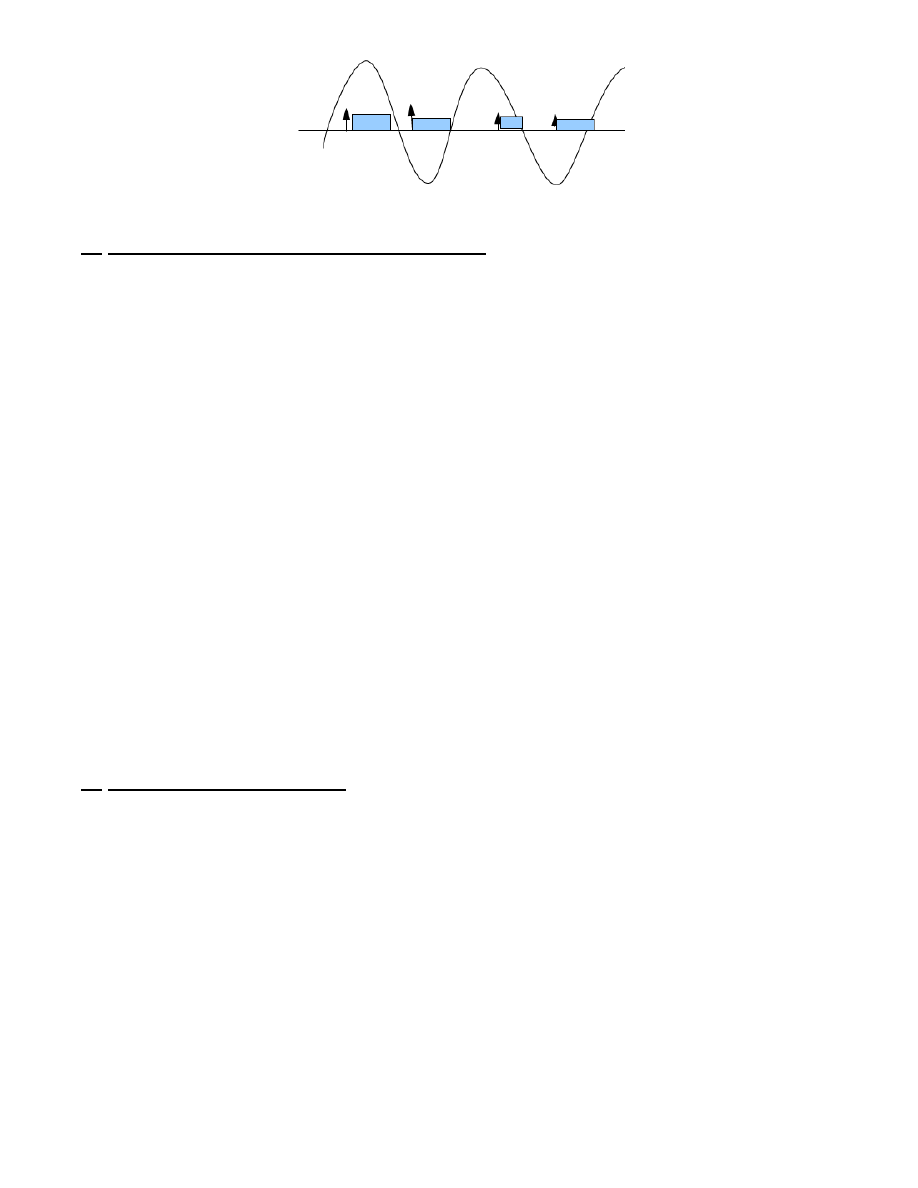
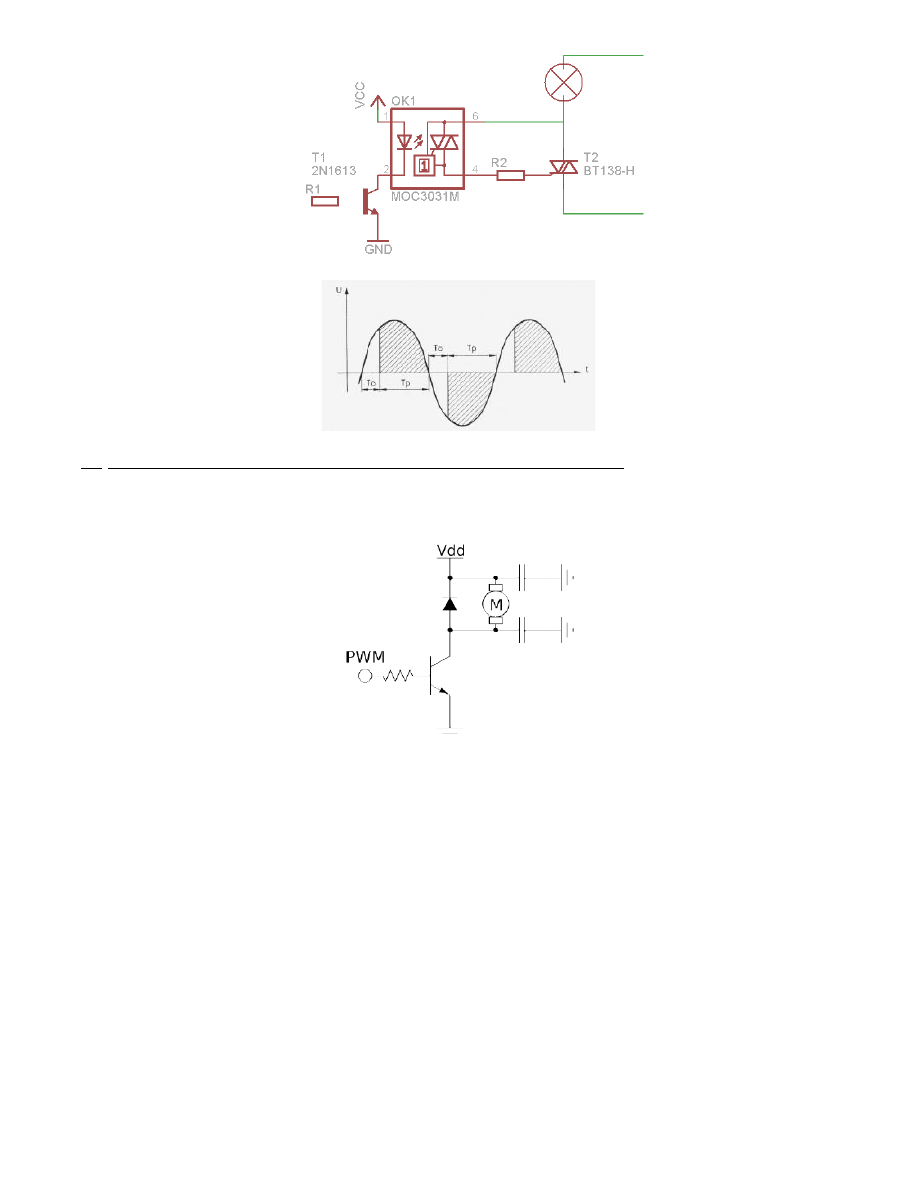
40. Na czym polega regulacja fazowa ?
Jedną z metod regulacji mocy odbiorników prądu zmiennego jest regulacja fazowa. Regulatorem mocy prądu zmiennego
ze sterowaniem fazowym jest układ, w którym wskutek zmiany kąta włączania elementu wykonawczego otrzymuje się
zmianę skutecznej wartości prądu i napięcia odbiornika oraz jego mocy. Jako element wykonawczy można wykorzystad
tyrystor lub triak (tyrystor dwukierunkowy).
Konstrukcje układów służących do regulacji fazowej mają różny stopieo skomplikowania. Bywają proste rozwiązania
oparte na wyzwalaniu bramki tyrystora napięciem sieci przy użyciu przesuwnika fazy typu RC, układu z elementami
przełączającymi (różne odmiany łączników, np. typu diak), tranzystorami jednozłączowymi, aż do rozwiązao
wykorzystujących specjalizowane układy scalone.
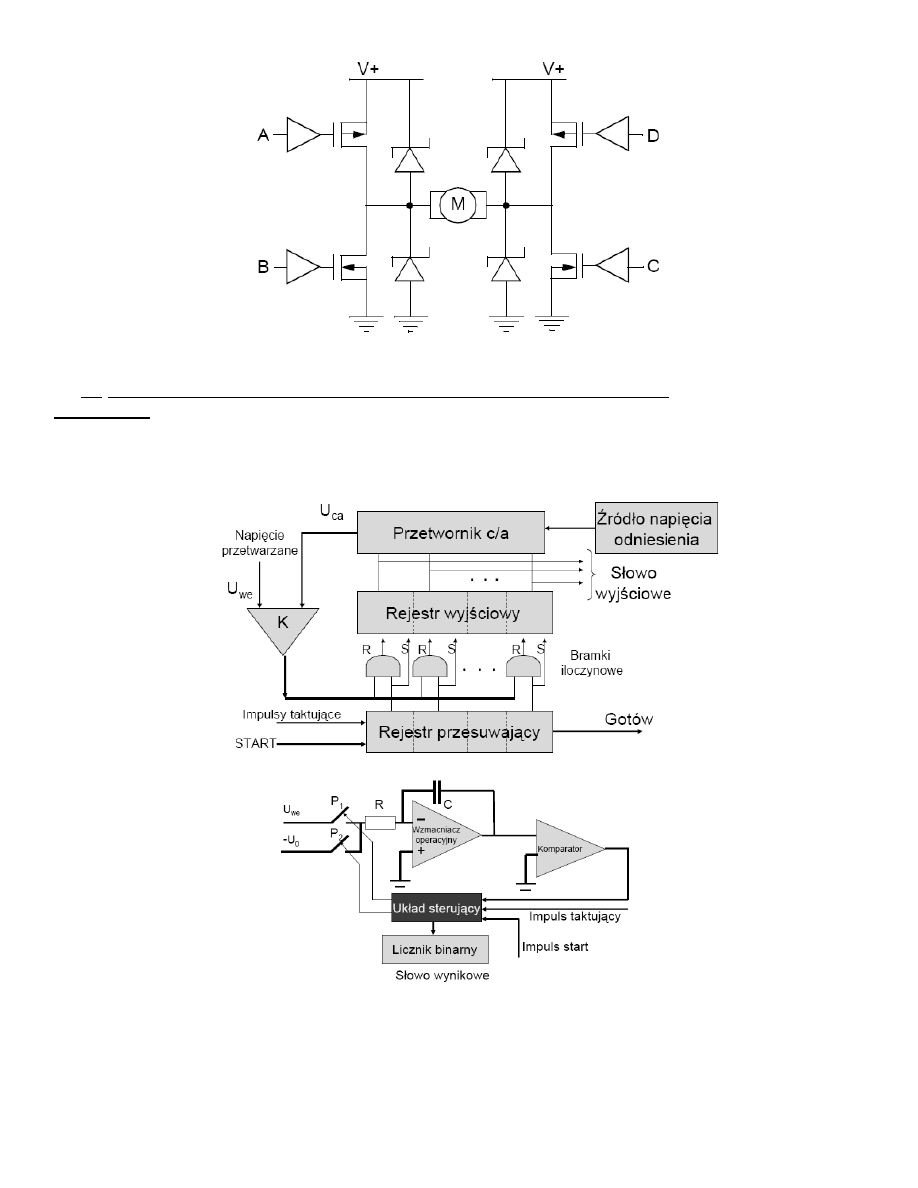
41. Pokazad układ sterowania obrotami silnika prądu stałego. Zasada działania.
Najprostszym jest sterowanie przez PWM, za każdym sygnałem PWM zwierany jest tranzystor i przez silnik przechodzi
prąd zasilania.
Drugim ważnym jest układ sterowania poprzez użycie mostka H.
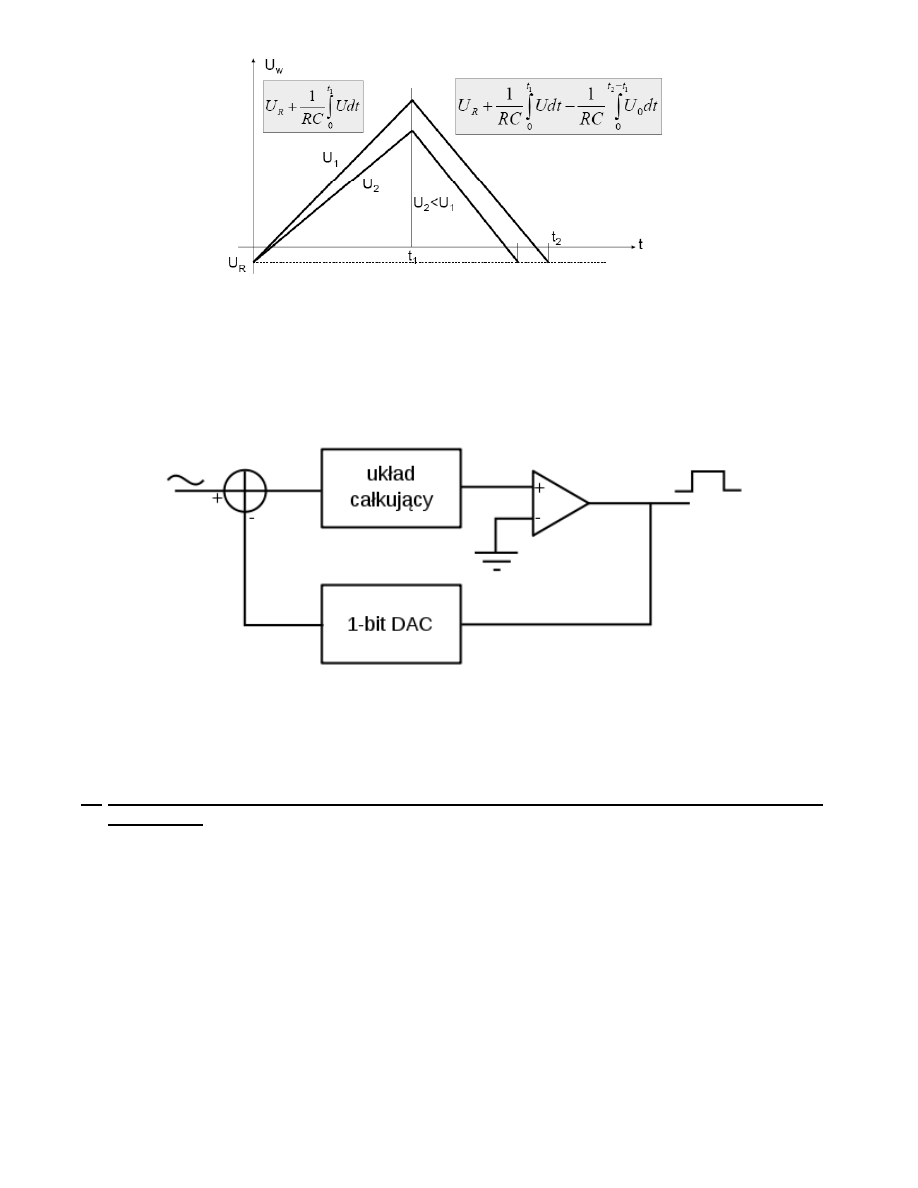
Jeśli zachodzi potrzeba regulacji prędkości obrotowej i kierunku obrotów takiego silnika to należy
rozważyd mostek sterujący typu „H”. W tym układzie sterowanie kierunku obrotów realizuje się poprzez sterowanie
tranzystorów parami. Jeden kierunek obrotów uzyskuje się włączając jednocześnie tranzystory A i C, drugi kierunek
włączając D i B. Realizację prędkości obrotowej w jednym z kierunków można osiągnąd poprzez sterowanie tranzystora C
lub B przy włączonym A lub D odpowiednio. Nie można włączad tranzystora A i B ani C i D jednocześnie. Spowoduje to
zwarcie zasilania do masy oraz prawdopodobnie uszkodzenie jednego z tranzystorów.
42. Jakie rodzaje przetworników ADC poznałeś ? Omówid zasadę działania wybranego
przetwornika.
Lista :
Kompensacyjne
Całkujące (np podówjne całkowanie)
Metoda podwójnego całkowania jest jednym z najdokładniejszych sposobów na przetwarzanie sygnału analogowego na
cyfrowy. Przetwornik podwójnie całkujący zamienia wartośd średnią napięcia mierzonego na czas tX. W pierwszym cyklu
całkowania do integratora doprowadzone jest napięcie mierzone UX. Całkowanie tego napięcia trwa zawsze tyle samo,
czyli najczęściej 20 ms. W drugiej fazie całkowania do wejścia integratora dołączone jest napięcie wzorcowe o
biegunowości przeciwnej do napięcia UX. Licznik cały czas zlicza impulsy z generatora zegarowego. Pojemnośd licznika
jest tak dobrana, że maksymalną liczbę impulsów zlicza w ciągu 20 ms. Kiedy napięcie wejściowe z integratora osiągnie
wartośd zero przerzutnik RS zmienia stan na przeciwny. Blokuje bramkę i kooczy się zliczanie impulsów.
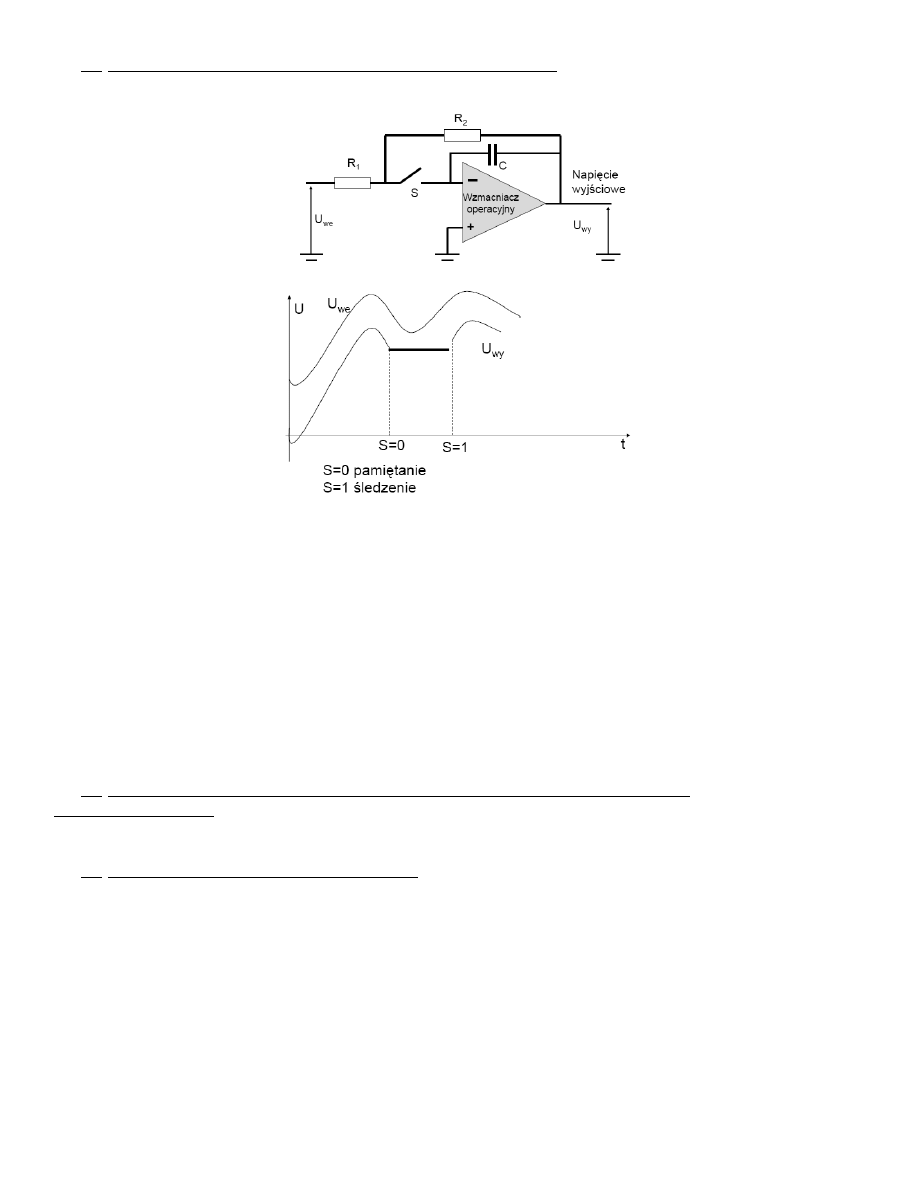
Sigma-delta
Zasadą działania przetworników ΔΣ jest dokonywanie zgrubnych przybliżeo sygnału celem zmierzenia błędu przybliżenia,
scałkowania go oraz późniejszej jego kompensacji. Średnia wartośd sygnału na wyjściu jest wtedy równa średniej
wartości sygnału na wejściu.
Flash
Half-Flash
43. Co to jest próbkowanie i kwantyzacja ? Podad podstawowe twierdzenia. Co to jest szum kwantyzacji i od
czego zależy ?
Próbkowanie (dyskretyzacja, kwantowanie w czasie) - proces tworzenia sygnału dyskretnego, reprezentującego sygnał
ciągły za pomocą ciągu wartości nazywanych próbkami. Zwykle jest jednym z etapów przetwarzania sygnału
analogowego na cyfrowy.
Kwantyzacja polega na przyporządkowaniu wartościom sygnału z jakiegoś określonego ciągłego przedziału wartości
dyskretnych z przyjętego skooczonego zbioru. Maksymalna wartośd sygnału dzielona jest na szereg drobniejszych
przedziałów. Zazwyczaj przedziały mają taką samą wielkośd. Z każdym przedziałem powiązana jest określona liczba. Jeśli
wielkośd sygnału wejściowego mieści się w danym przedziale, to wówczas jest ona reprezentowana przez liczbę
związaną z tym przedziałem.
Ponieważ w procesie kwantyzacji sygnał jest zaokrąglany w rezultacie powstają błędy. Błędy te objawiają się w postaci
tak zwanego szumu kwantyzacji. Im większe przedziały kwantyzacji, tym mniejsza dokładnośd kawntyzacji i tym większy
szum kwantyzacji. W przetwarzaniu analogowo-cyfrowym dokładnośd liniowej kwantyzacji jest określona przez ilośd
bitów wykorzystywanych do zapisu skwantowanej wartości. Zwiększenie ilości bitów prowadzi do zwiększenia ilości
przedziałów i dokładniejszego odwzorowania sygnału.
44. Co to jest układ Sample & Hold ? Jak działa i po co się go stosuje ?
Jest to układ próbkująco pamiętający.
Zasada działania:
Klucz włącza się, napięcie na kondensatorze ustala się do wartości napięcia wejściowego. Klucz wyłącza się, a wartośd
napięcia jest zapamiętywana w kondensatorze.
Po co:
Do przetwarzania danych, jako układ wejściowy w przetwornikach a/c. (Przetworniki a/c stosowane są nie tylko do
przetwarzania napięd stałych, lecz także do przetwarzania napięd zmieniających się w czasie. W tym przypadku
pobieranie i przetwarzanie próbek napięcia następuje w wybranych chwilach czasu, na ogół periodycznie z pewną
częstotliwością, zwaną częstotliwością próbkowania. Podczas trwania konwersji w przetworniku wartośd sygnału
wartośd sygnału wejściowego może ulec zmianom, co powoduje powstawanie pewnego błędu, zależnego od wzajemnej
relacji szybkości zmian sygnału wejściowego i szybkości przetwarzania. W celu uniknięcia tego błędu, szczególnie przy
przetwarzaniu napięd szybkozmiennych, stosuje się układ próbkujący z pamięcią, który umieszczony przed
przetwornikiem utrzymuje stała wartośd sygnału podczas przetwarzania.)
45. Omówid podstawowe zadania oprogramowania w zakresie przetwarzania zmiennych
procesowych ciągłych ?
46. Podad definicję systemu czasu rzeczywistego.
System czasu rzeczywistego to taki, w którym poprawnośd obliczeo zależy nie tylko od logicznej poprawności samych
obliczeo, ale także od czasu w jakim zostanie wyprodukowany wynik. Jeśli nie są spełnione ograniczenia czasowe, mówi
się, ze nastąpił błąd systemu, system zawiódł.
Inne spotykane definicje:
Tryb przetwarzania w czasie rzeczywistym jest takim trybem, w którym programy przetwarzające dane napływające z
zewnątrz są zawsze gotowe, a wynik ich działania jest dostępny nie później niz po zadanym czasie. Moment nadejścia
kolejnych danych może byd losowy (asynchroniczny) lub ściśle określony (synchroniczny)

System czasu rzeczywistego jest systemem interaktywnym, który utrzymuje ciągły związek z asynchronicznym
środowiskiem, np. środowiskiem, które zmienia się bez względu na system, w sposób niezależny
Oprogramowanie czasu rzeczywistego odnosi się do systemu lub trybu działania, w którym przetwarzanie jest
przeprowadzane na bieżąco, w czasie wystąpienia zewnętrznego zdarzenia, w celu użycia rezultatów przetwarzania do
kontrolowania lub monitorowania zewnętrznego procesu
System czasu rzeczywistego odpowiada w sposób przewidywalny (w określonym czasie) na bodźce zewnętrzne
napływające w sposób nieprzewidywalny.
System mikrokomputerowy działa w czasie rzeczywistym, jeżeli wypracowane przez ten system decyzje są realizowane w
tempie obsługiwanego procesu. Inaczej mówiąc, system działa w czasie rzeczywistym, jeżeli czas reakcji systemu jest
niezauważalny przez proces (decyzja jest wypracowana we właściwym czasie)
47. Wskazad mechanizmy stosowane w systemach czasu rzeczywistego do kolejkowania zadao.
48. Jakie są zalety a jakie wady korzystania z systemów operacyjnych w systemach
wbudowanych ?
Wyszukiwarka
Podobne podstrony:
Opracowanie pytań MC OMEN 3
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN
Opracowanie pytań MC KULA MC OMEN 2
Opracowanie Sciaga MC OMEN
Opracowanie wykladow MC OMEN
Opracowanie pytan MC KULA MC OM Nieznany
Opracowanie projektu MC OMEN
Opracowanie Sciaga MC OMEN
Opracowanie wykladow MC OMEN
więcej podobnych podstron