A
KADEMIA
G
ÓRNICZO
-H
UTNICZA
IM
. S. S
TASZICA
W
K
RAKOWIE
Wydział Inżynierii Mechanicznej i Robotyki
Hydrauliczne i pneumatyczne układy automatyki.
Dominik Kułacz, Damian Łukasik, Marcin Rzucidło
Rok III C, grupa 19B, rok akademicki 2009/2010
Laboratorium 3: Złożone układy sterowania elektropneumatycznego.
1. Stanowisko laboratoryjne
•
Listwa zaciskowa LZ-0x, do której wstępnie podłączono krańcówki, zasilacz
elektryczny 24V i cewki poszczególnych zaworów elektropneumatycznych
•
Zasilacz elektryczny 24 V,
•
Krańcówki elektryczne – w zależności od stanowiska mogą to być czujniki
indukcyjne lub
•
przekaźniki sterowane mechanicznie przy pomocy rolki,
•
Dwa elektropneumatyczne zawory 5/2 bistabilne,
•
Jeden elektropneumatyczny zawór 5/2 monostabilny,
•
Dwa przyciski wyposażone każdy w styki normalnie otwarty (NO) i normalnie
zamknięty (NC)
•
Wskaźnik optyczny (żarówkę),
•
W zależności od stanowiska jeden lub dwa przekaźniki.
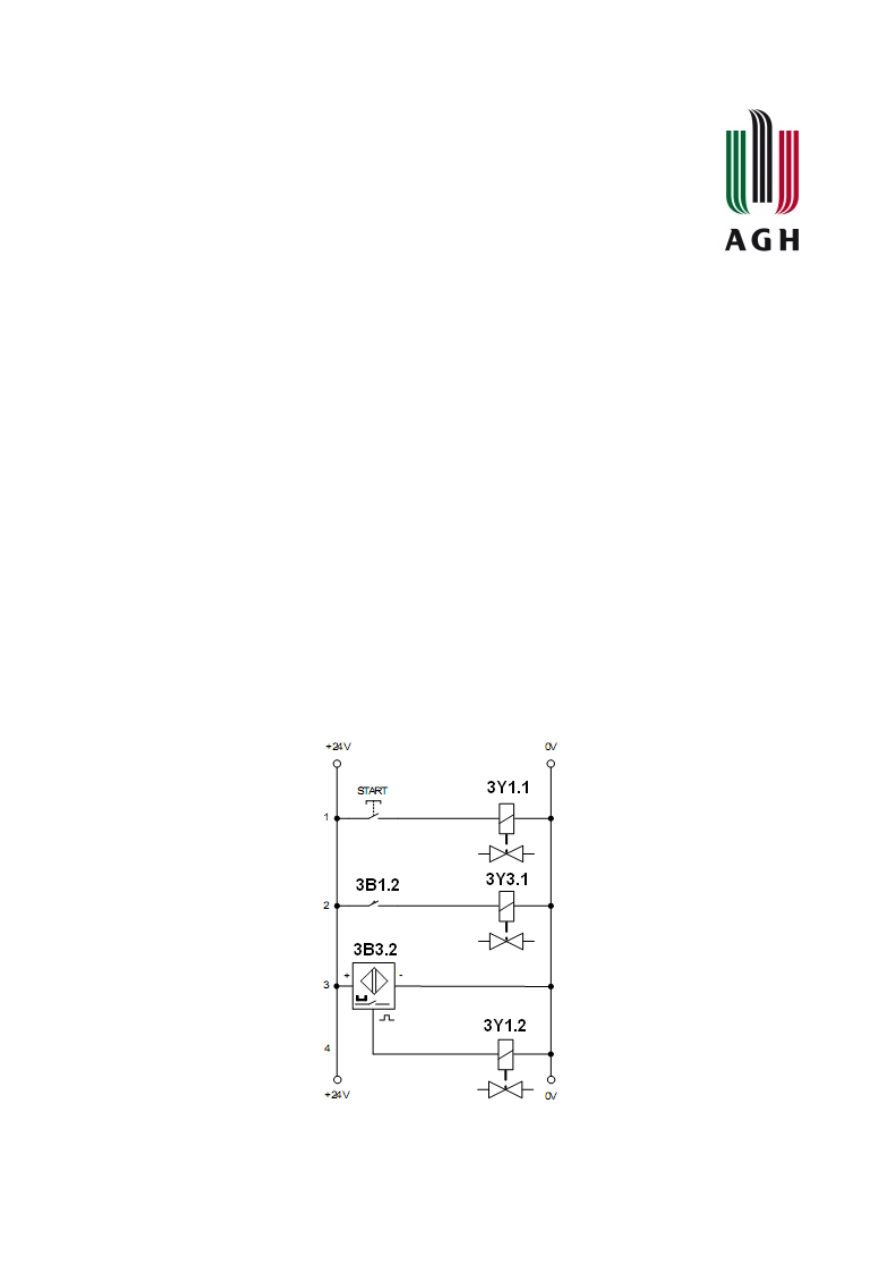
2. Układ sterowania z zaworem bistabilnym i mononstabilnym
Rys. 1: Schemat drabinkowy obwodu elektrycznego sterującego pracą dwóch siłowników
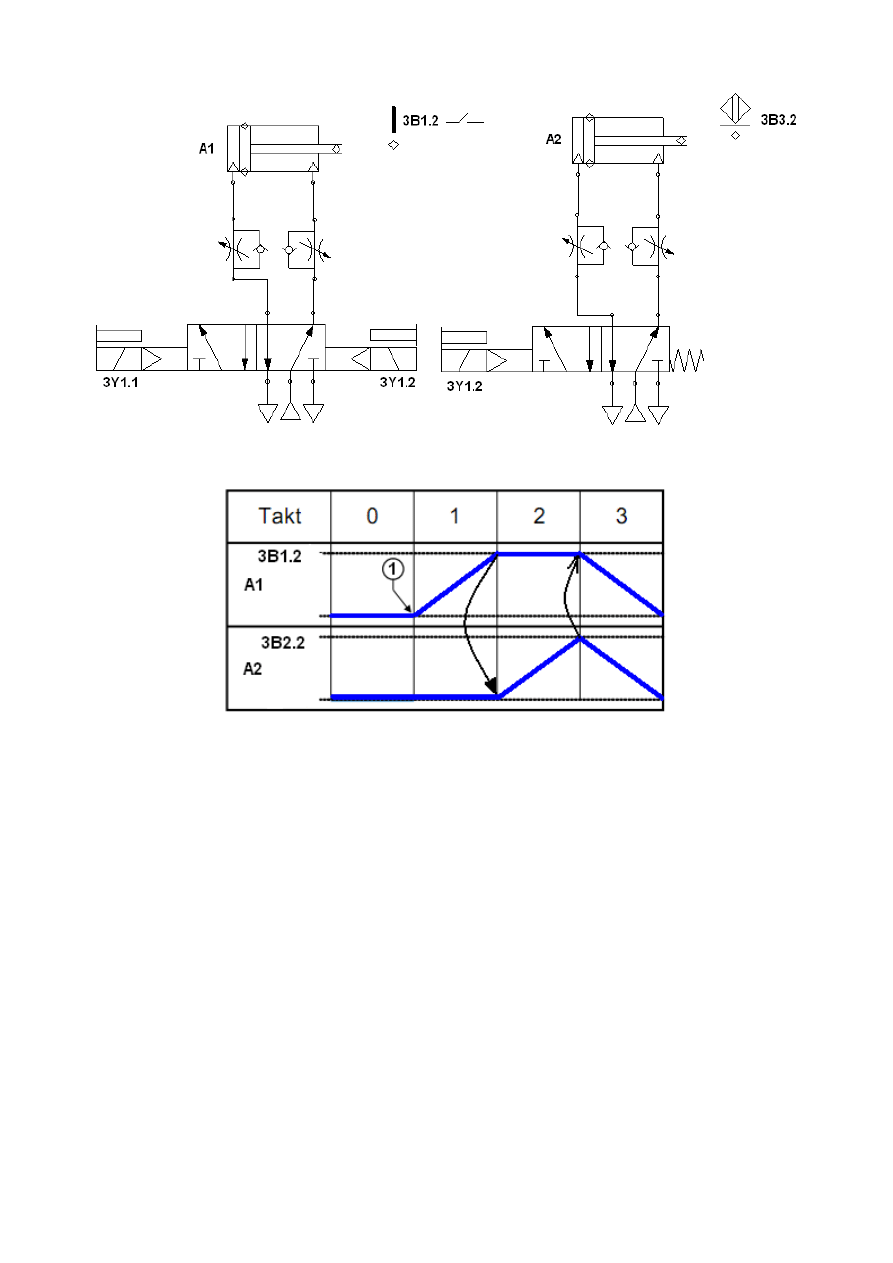
Rys. 2: Schemat układu elektropnematycznego
Cyklogram pracy układu
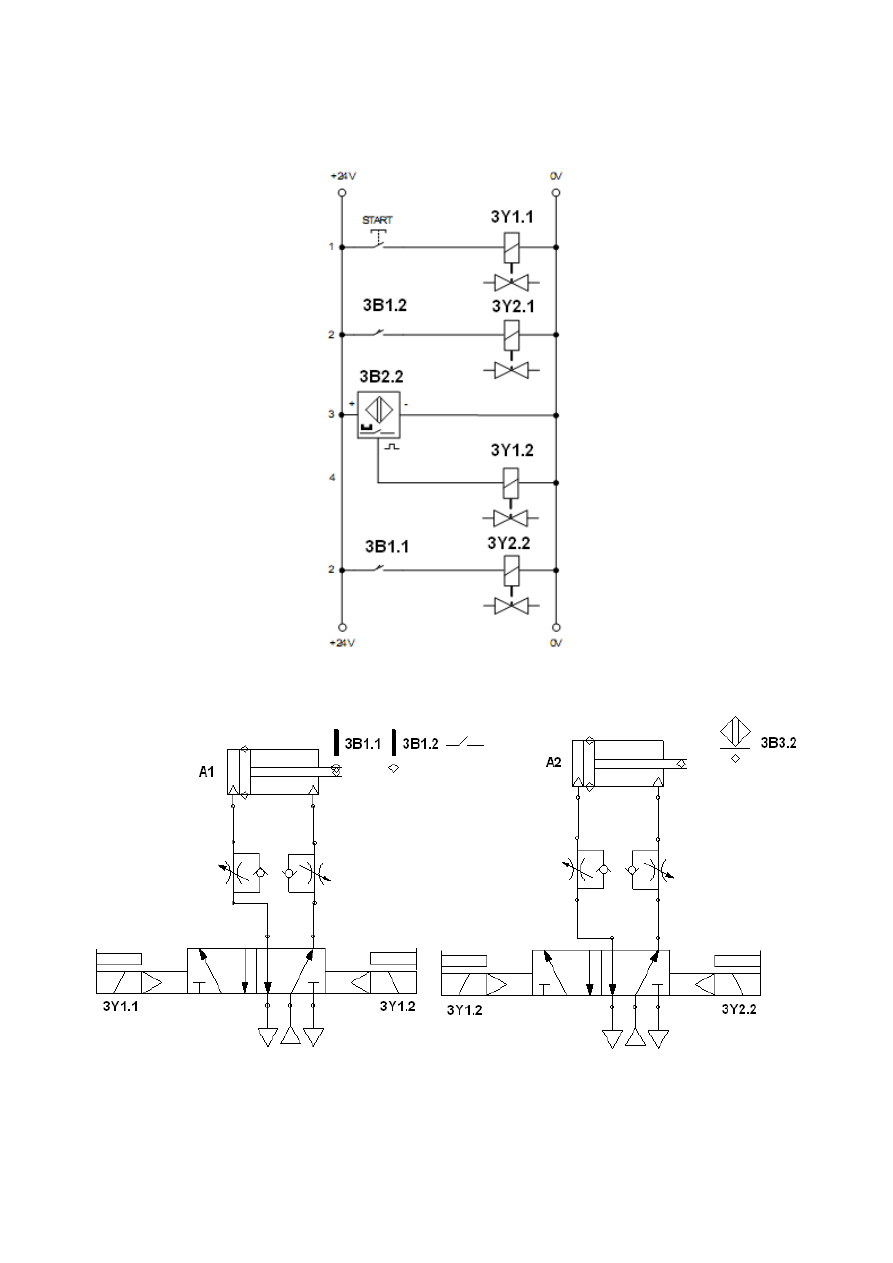
3. Elektropneumatyczny kombinacyjny układ sterowania z zaworami
bistabilnymi
Rys. 3: Schemat drabinkowy obwodu elektrycznego sterującego pracą dwóch siłowników
Rys. 4: Schemat układu elektropnematycznego
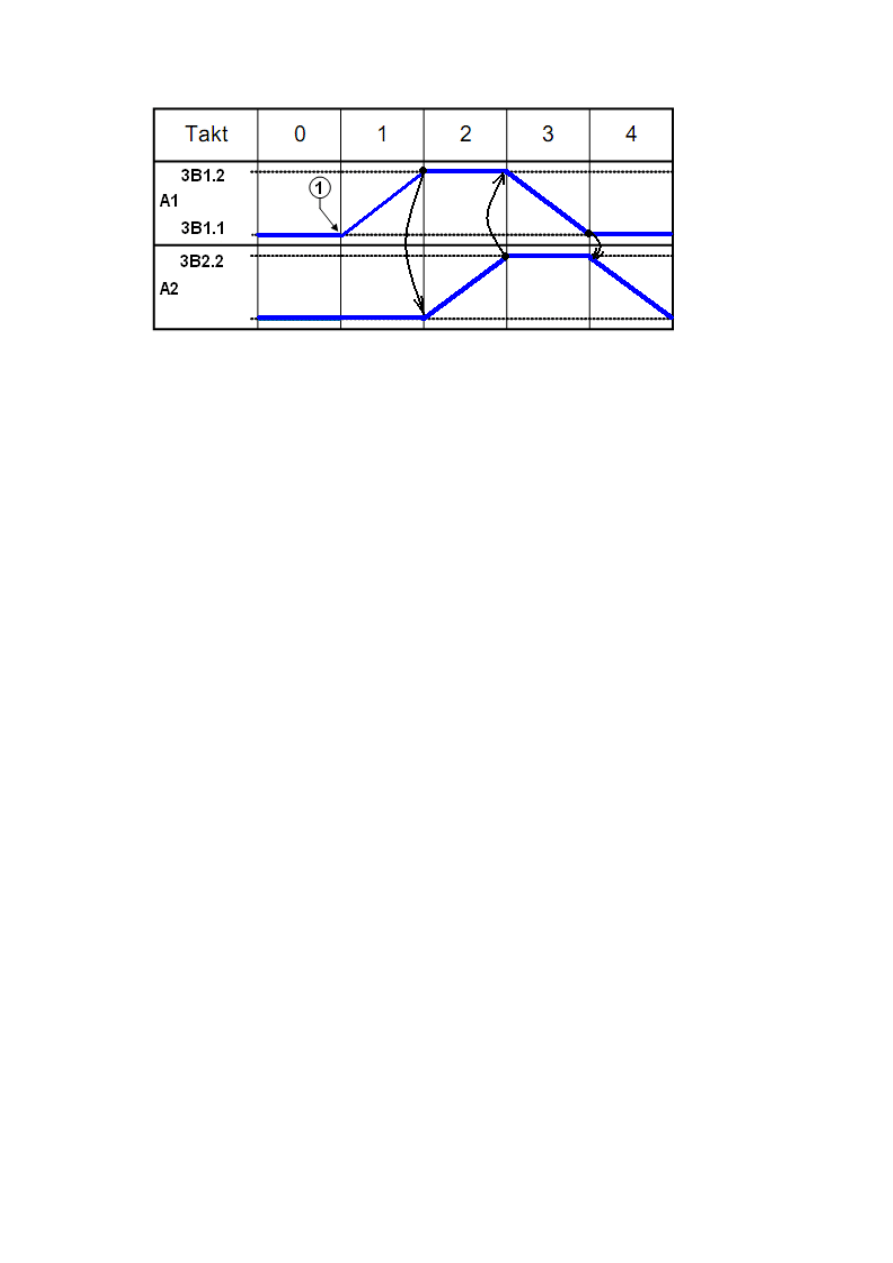
Cyklogram pracy układu
Document Outline
Wyszukiwarka
Podobne podstrony:
AIP Lab3 Spr
lab3 spr
hipua spr 4
hipua spr 2
I0H1S4 Kamil Piersa spr lab3 docx
hipua spr 3
Spr[1] adm i uznanie adm
08 03 KPGO Spr z realizacji
17 Rozp Min Zdr w spr szk czyn Nieznany
lab3
lab3 kalorymetria
przetworka spr ostatnie
as spr 5 id 69978 Nieznany (2)
metr spr 5
belka spr podl
Instrukcja Lab3
więcej podobnych podstron