1
SYSTEMY ELEKTROENERGETYCZNE
Rozdział
3
OBLICZANIE ROZPŁYWÓW MOCY
Łódź, 2011 rok
Andrzej Kanicki
2
OBLICZANIE PRZEPŁYWÓW MOCY.
Rozpływ mocy w zamkniętej sieci elektroenergetycznej
Typy węzłów w obliczeniach rozpływów mocy i wielkości znane:
1)
Odbiorcze
2)
Generatorowe
3)
Bilansujący
Węzły odbiorcze nazywamy węzłami typu PQ
a generatorowe typu PU.
Równanie mocy w i‐tym węźle odbiorczym jest postaci:
Wielkości znane to admitancje własna i wzajemna węzła, wielkości nieznane
to napięcia w węzłach.
Napięcia można zapisać
w układzie współrzędnych biegunowych lub
prostokątnych, czyli:
const.
=
o
P
const.
=
o
Q
const.
=
G
P
const.
=
G
U
const.
=
U
const.
0
=
=
δ
∑
≠
=
∗
∗
∗
∗
⋅
⋅
+
⋅
=
⋅
=
N
i
j
j
ij
j
i
ii
i
i
i
i
Y
U
U
Y
U
I
U
S
1
2
1
,
2
,
1
2
1
−
=
+
=
=
N
i
jU
U
e
U
U
i
i
j
i
i
i
K
δ
[
]
[
]
T
T
T
T
T
T
2
1
lub
U
U
X
U
X
=
=
δ
3
OBLICZANIE PRZEPŁYWÓW MOCY.
Rozpływ mocy w zamkniętej sieci elektroenergetycznej
( )
( )
0
=
=
−
X
F
S
X
S
z
0
2
1
2
2
2
=
−
+
i
i
i
U
U
U
(
)
(
)
[
]
0
sin
cos
1
2
=
−
−
⋅
+
−
⋅
⋅
⋅
+
⋅
∑
≠
=
i
N
i
j
j
j
i
ij
j
i
ij
j
i
ii
i
P
B
G
U
U
G
U
δ
δ
δ
δ
(
)
(
)
[
]
0
cos
sin
1
2
=
−
−
⋅
−
−
⋅
⋅
⋅
+
⋅
−
∑
≠
=
i
N
i
j
j
j
i
ij
j
i
ij
j
i
ii
i
Q
B
G
U
U
B
U
δ
δ
δ
δ
Dla węzłów odbiorczych do rozwiązania w obliczeniach rozpływów mocy
jest równanie:
gdzie: to moce zadane w węźle.
Dla węzła generatorowego mamy dodatkowo równanie dla napięcia zadanego:
Równanie mocy w układzie biegunowym jest postaci:
z
S
4
OBLICZANIE PRZEPŁYWÓW MOCY.
Rozpływ mocy w zamkniętej sieci elektroenergetycznej
(
)
(
)
0
1
2
2
2
1
1
1
1
2
=
−
⋅
+
⋅
⋅
+
⋅
−
⋅
⋅
+
⋅
∑
∑
≠
=
≠
=
i
N
i
j
j
N
i
j
j
j
ij
j
ij
i
j
ij
j
ij
i
ii
i
P
U
B
U
G
U
U
B
U
G
U
G
U
(
)
(
)
0
2
1
2
1
2
1
1
1
2
=
−
⋅
−
⋅
⋅
+
⋅
+
⋅
⋅
+
⋅
−
∑
∑
≠
=
≠
=
i
N
i
j
j
N
i
j
j
j
ij
j
ij
i
j
ij
j
ij
i
ii
i
Q
U
B
U
G
U
U
B
U
G
U
G
U
( )
k
k
X
X
ϕ
=
+1
( )
0
0
X
X
ϕ
=
Warunki zbieżności procesu iteracyjnego są
następujące:
1) Jeśli funkcja
jest różniczkowalne i wypukła w pewnym otoczeniu punktu
( )
X
ϕ
to
warunkiem zbieżności jest:
0
X
{ }
( )
1
max
<
=
∈
j
W
j
λ
ρ
( )
[
]
0
det
0
=
−
j
λ
X
J
( )
{ }
W
j
i
dla
x
x
x
j
i
∈
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
=
,
0
0
∂
ϕ
∂
X
J
Równanie mocy w układzie prostokątnym jest postaci:
Równania mocy rozwiązywane są
metodami iteracyjnymi, czyli:
Szukanym rozwiązaniem jest wektor , który:
0
X
5
OBLICZANIE PRZEPŁYWÓW MOCY.
Rozpływ mocy w zamkniętej sieci elektroenergetycznej
2) Jeśli istnieje liczba naturalna większa lub równa jedności oraz rzeczywista
taka, że:
p
c
c
p
k
k
k
=
−
−
+
∞
⇒
0
0
1
lim
X
X
X
X
W praktycznych obliczeniach rozpływów mocy zbieżności procesu
iteracyjnego kontroluje się
następująco:
N
i
dla
U
U
U
k
i
k
i
k
i
K
,
2
,
1
1
1
=
<
−
=
+
+
ε
Δ
N
i
dla
U
U
U
U
k
i
k
i
k
i
k
i
K
,
2
,
1
1
1
=
−
<
−
−
+
Iteracje te powtarza się
tak długo, dopóki poprawki napięciowe we
wszystkich węzłach sieci będą
miały wartość
mniejszą
od założonej
dokładności obliczania modułów napięć
węzłowych :
ε
Warunek powyższy może być
również
sformułowany dla mocy czynnych i
biernych.
6
OBLICZANIE PRZEPŁYWÓW MOCY.
Rozpływ mocy w zamkniętej sieci elektroenergetycznej
W obliczeniach rozpływów mocy musimy pamiętać
o wielu różnych
ograniczeniach, które musza być
spełnione.
1) Niezależnie od typu węzła mamy:
2) Dla węzła typu PU
W przypadku osiągnięcia jednego z tych ograniczeń
należy zmienić
typ
tego węzła na PQ.
3) W transformatorach mamy:
a zmiany przekładnia napięciowej i kątowej transformatora mogą
odbywać
się
skokowo:
∞
=
=
≤
≤
K
K
,
2
,
1
,
2
,
1
dla
max
min
k
N
i
U
U
U
i
k
i
i
∞
=
=
≤
≤
K
K
,
2
,
1
,
2
,
1
dla
max
min
k
G
i
Q
Q
Q
i
k
i
i
∞
=
=
≤
≤
K
K
,
2
,
1
,
2
,
1
dla
max
min
k
M
i
i
k
i
i
ϑ
ϑ
ϑ
∞
=
=
≤
≤
K
K
,
2
,
1
,
2
,
1
dla
max
min
k
M
i
i
k
i
i
α
α
α
M
j
j
stare
j
nowe
j
K
,
2
,
1
dla
=
+
=
ϑ
Δ
ϑ
ϑ
M
j
j
stare
j
nowe
j
K
,
2
,
1
dla
=
+
=
α
Δ
α
α
7
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda Gaussa
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
⋅
−
−
⋅
=
∑
≠
=
+
N
i
j
j
k
j
ij
k
i
i
i
ii
k
i
U
Y
U
jQ
P
Y
U
1
*
1
1
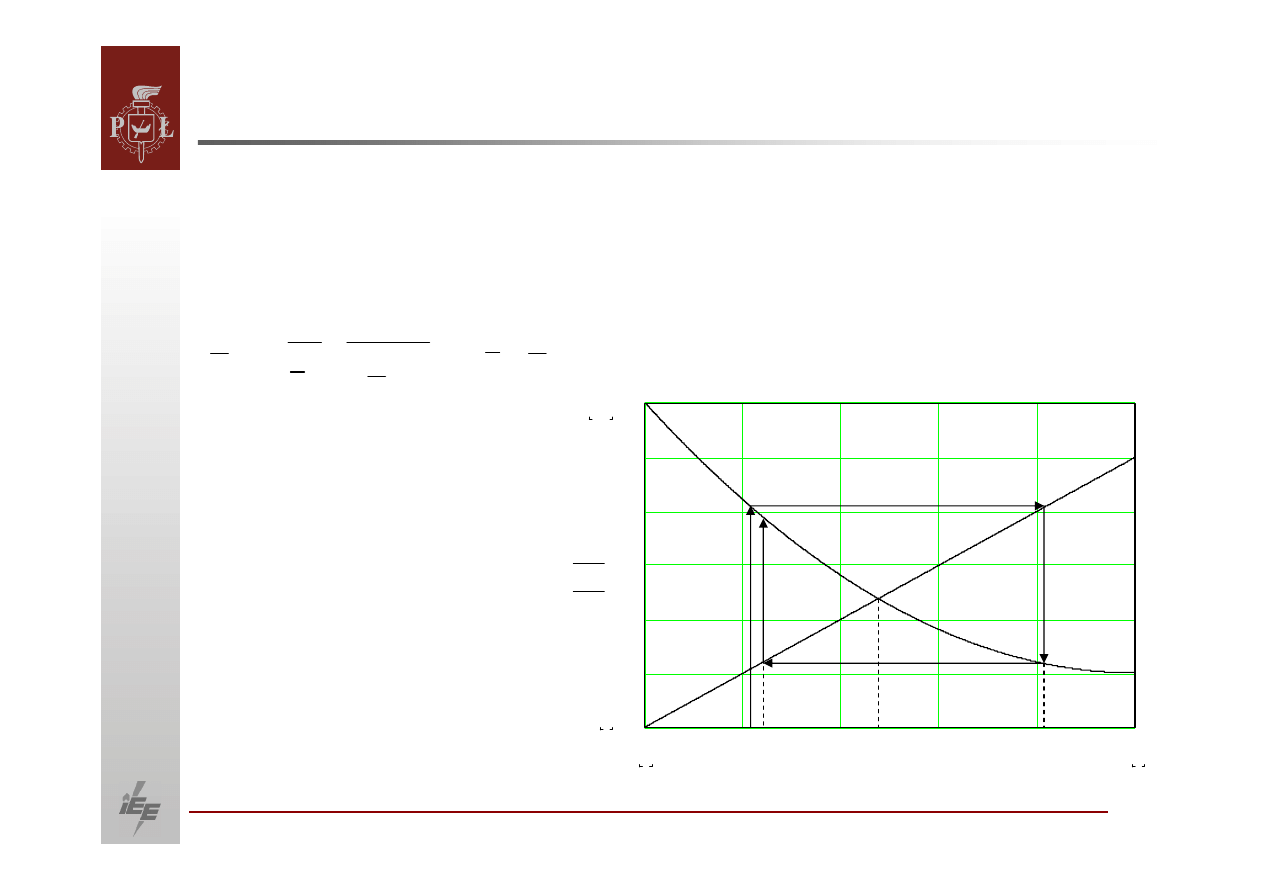
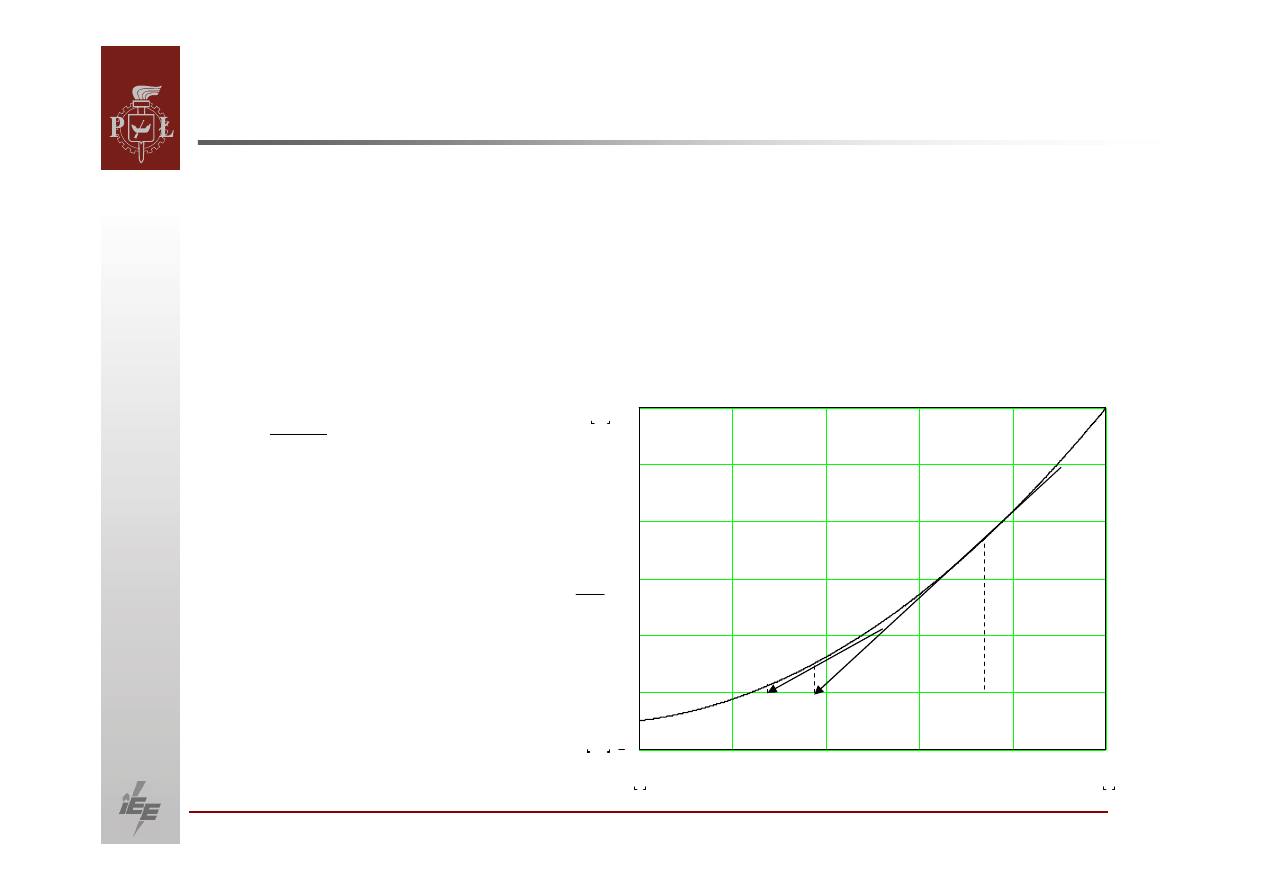
W metodzie Gaussa funkcję
iteracyjną
uzyskuje się
z odpowiednio
przekształconego równania na moc co zapewnia optymalną
zbieżność
procesu iteracyjnego:
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
1.2
1.2
0
y x
( )
y1 x
( )
1
0
x
( )
x
y
ϕ
=
x
y
=
0
x
1
x
2
x
0
x
Ilustracja procesu
iteracyjnego w metodzie
Gaussa
8
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda Gaussa
( )
( )
∑
∑
≠
=
≠
=
+
⋅
−
⋅
−
⋅
+
⋅
=
N
i
j
j
k
j
ij
N
i
j
j
k
j
ij
k
i
k
i
ii
k
i
k
i
ii
k
i
U
b
U
a
U
U
b
U
U
a
U
1
1
2
2
1
2
1
2
1
1
( )
( )
∑
∑
≠
=
≠
=
+
⋅
−
⋅
+
⋅
+
⋅
−
=
N
i
j
j
k
j
ij
N
i
j
j
k
j
ij
k
i
k
i
ii
k
i
k
i
ii
k
i
U
a
U
b
U
U
a
U
U
b
U
1
1
2
2
1
2
1
2
1
2
2
ii
ii
i
ii
i
ii
Y
B
Q
G
P
a
⋅
−
⋅
=
2
ii
ii
i
ii
i
ii
Y
G
Q
B
P
b
⋅
+
⋅
=
2
ii
ii
ij
ii
ij
ij
Y
B
B
G
G
a
⋅
+
⋅
=
2
ii
ii
ij
ii
ij
ij
Y
G
B
B
G
b
⋅
−
⋅
=
We współrzędnych prostokątnych mamy:
Metoda Gaussa ‐
Seidla
[
]
T
k
N
k
i
k
i
k
i
k
k
U
U
U
U
U
K
K
,
,
,
,
1
1
1
1
1
1
+
+
−
+
+
=
U
9
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda klasyczna Newtona‐Raphsona
( )
( )
0
X
J
X
F
X
F
=
⋅
+
≈
k
k
k
Δ
( ) ( )
k
k
k
X
F
J
X
⋅
−
=
−1
Δ
k
X
X
j
i
k
X
F
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
∂
∂
J
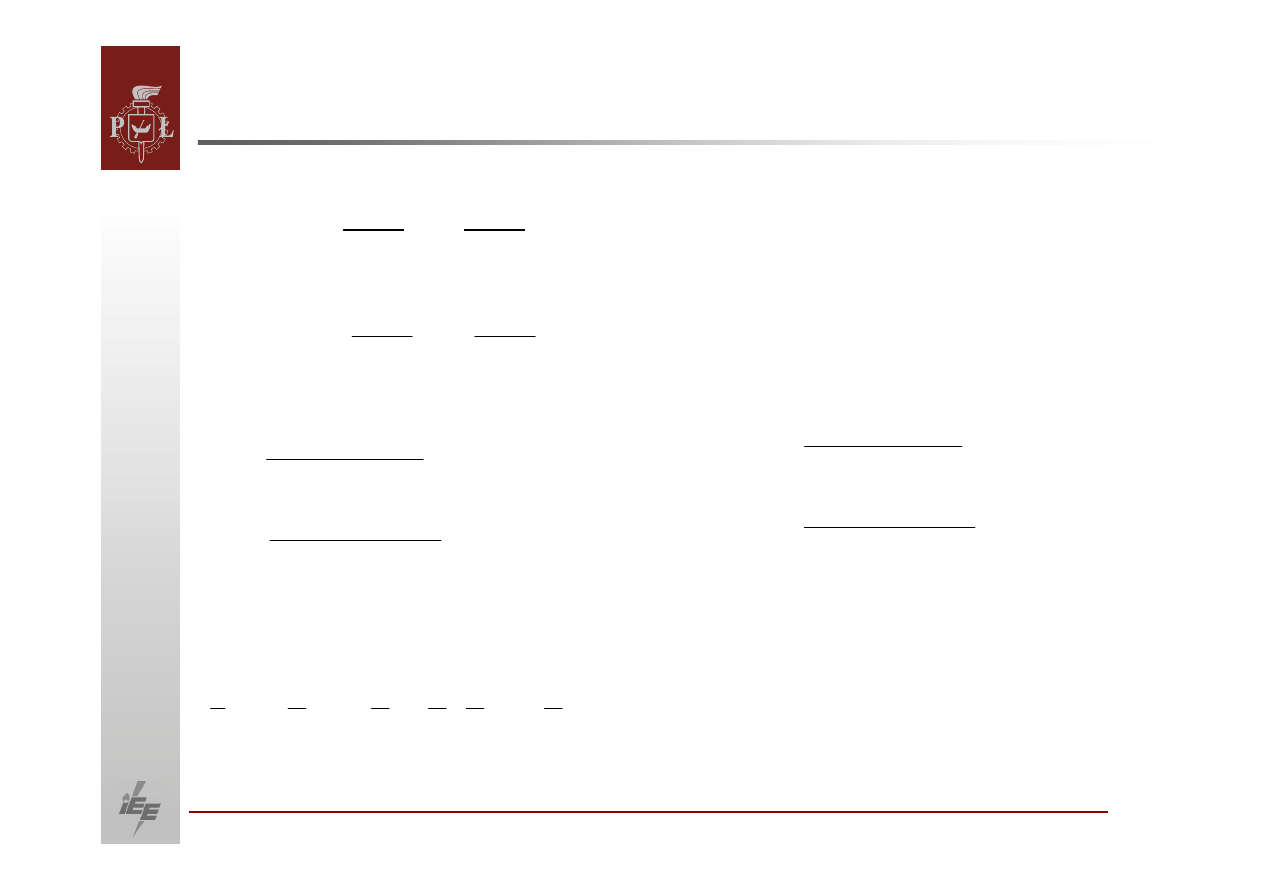
W metodzie klasycznej Newtona‐Raphsona
funkcję
iteracyjną
tworzy się,
wykorzystując liniowe przybliżenia przyrostów funkcji czyli przez rozkład
funkcji nieliniowej na szereg Taylora:
0
0.2
0.4
0.6
0.8
1
2
0
2
4
6
8
10
10
1
−
y x
( )
1
0
x
0
x
1
x
( )
x
F
y
=
0
x
2
x
10
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda klasyczna Newtona‐Raphsona
( )
( )
k
k
k
k
k
k
X
F
J
X
X
X
X
⋅
−
=
+
=
−
+
1
1
Δ
( )
k
k
k
k
X
J
S
X
F
Δ
Δ
⋅
−
=
=
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
U
L
M
N
H
Q
P
Δ
δ
Δ
Δ
Δ
obl
i
zad
i
i
P
P
P
−
=
Δ
obl
i
zad
i
i
Q
Q
Q
−
=
Δ
Z równania na rozkład funkcjo noeliniowej
wynika zależność
iteracyjna:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
−
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
=
j
obl
i
j
obl
i
j
zad
i
j
i
P
P
P
P
δ
Δ
∂
∂
δ
Δ
∂
∂
δ
Δ
∂
∂
δ
Δ
∂
Δ
∂
H
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
j
obl
i
U
P
Δ
∂
∂
N
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
j
obl
i
Q
δ
Δ
∂
∂
M
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
j
obl
i
U
Q
Δ
∂
∂
L
11
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda klasyczna Newtona‐Raphsona
i
k
≠
(
)
ki
ki
ki
ki
i
k
i
obl
k
ki
B
G
U
U
P
H
δ
δ
δ
∂
∂
cos
sin
⋅
−
⋅
⋅
⋅
=
=
(
)
ki
ki
ki
ki
k
i
obl
k
ki
B
G
U
U
P
N
δ
δ
∂
∂
sin
cos
⋅
+
⋅
⋅
=
=
(
)
ki
ki
ki
ki
i
k
i
obl
k
ki
B
G
U
U
Q
M
δ
δ
δ
∂
∂
sin
cos
⋅
+
⋅
⋅
⋅
−
=
=
(
)
ki
ki
ki
ki
k
i
obl
k
ki
B
G
U
U
Q
L
δ
δ
∂
∂
cos
sin
⋅
−
⋅
⋅
=
=
i
k
=
(
)
[
]
∑
≠
=
⋅
−
⋅
⋅
⋅
−
=
=
N
k
j
j
kj
kj
kj
kj
j
k
k
obl
k
kk
B
G
U
U
P
H
1
cos
sin
δ
δ
δ
∂
∂
2
k
kk
k
kk
U
B
Q
H
⋅
−
−
=
Podmacierze są
postaci:
L
M
N
H
i
,
,
(
)
[
]
∑
≠
=
⋅
+
⋅
⋅
+
⋅
⋅
=
=
N
k
j
j
kj
kj
kj
kj
j
kk
k
k
obl
k
kk
B
G
U
G
U
U
P
N
1
sin
cos
2
δ
δ
∂
∂
k
kk
k
k
kk
U
G
U
P
N
⋅
+
=
12
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda klasyczna Newtona‐Raphsona
(
)
[
]
∑
≠
=
⋅
+
⋅
⋅
⋅
=
=
N
k
j
j
kj
kj
kj
kj
j
k
k
obl
k
kk
B
G
U
U
Q
M
1
sin
cos
δ
δ
δ
∂
∂
2
k
kk
k
kk
U
G
P
M
⋅
−
=
(
)
[
]
∑
≠
=
⋅
−
⋅
⋅
+
⋅
⋅
−
=
=
N
k
j
j
kj
kj
kj
kj
j
kk
k
k
obl
k
kk
B
G
U
B
U
U
Q
L
1
cos
sin
2
δ
δ
∂
∂
k
kk
k
k
kk
U
B
U
Q
L
⋅
−
=
Podobne wyprowadzenie można wykonać
w przypadku przedstawienia
wektora szukanych napięć
węzłowych w układzie współrzędnych
prostokątnych:
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
2
1
U
U
L
M
N
H
Q
P
Δ
Δ
Δ
Δ
i
k
≠
k
i
k
i
i
obl
k
ki
U
I
U
I
P
H
1
2
2
1
⋅
−
⋅
=
=
δ
∂
∂
i
k
i
k
i
i
obl
k
ki
U
U
I
U
I
U
P
N
2
2
1
1
⋅
+
⋅
=
=
∂
∂
k
i
k
i
i
obl
k
ki
U
I
U
I
Q
M
2
2
1
1
⋅
−
⋅
−
=
=
δ
∂
∂
i
k
i
k
i
i
obl
k
ki
U
U
I
U
I
U
Q
L
1
2
2
1
⋅
−
⋅
=
=
∂
∂
∑
=
⋅
=
+
=
N
j
ij
j
i
i
i
Y
U
jI
I
I
1
2
1
Tylko dla
13
OBLICZANIE PRZEPŁYWÓW MOCY.
Zmodyfikowana i rozłączna metoda Newtona
W zmodyfikowanej metodzie Newtona funkcja iteracyjna ma tu postać:
( )
( )
k
k
k
X
F
J
X
X
⋅
−
=
−
+
1
1
1
W rozłącznej metodzie Newtona równanie:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⋅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
k
k
k
k
k
k
k
k
U
L
M
N
H
Q
P
Δ
δ
Δ
Δ
Δ
zapisuje się
w postaci:
wykorzystując fakt, że podmacierze poza główną
przekątną
mają
elementy
o wartościach
bliskich zeru. Otrzymujemy do rozwiązania 2 równania:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⋅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
k
k
k
k
k
k
U
L
H
Q
P
Δ
δ
Δ
Δ
Δ
0
0
( )
( )
k
k
P
k
k
k
k
k
P
J
P
H
Δ
δ
Δ
δ
δ
δ
⋅
−
=
⋅
−
=
−
−
+
1
1
1
( )
( )
k
k
QU
k
k
k
k
k
Q
J
U
Q
L
U
U
Δ
Δ
⋅
−
=
⋅
−
=
−
−
+
1
1
1
14
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda Stotta, metoda van Nessa
Metoda Stotta
to połączenie metody rozłącznej i zmodyfikowanej.
( )
k
k
k
P
H
Δ
δ
δ
⋅
−
=
−
+
1
1
1
( )
k
k
k
Q
L
U
U
Δ
⋅
−
=
−
+
1
1
1
Metoda van
Nessa
jest modyfikacją
metody Newtona‐Rapsona, polegającą
na
pominięciu w
macierzy
Jacobiego
elementów wzajemnych, tzn.:
i
j
dla
M
N
L
H
ij
ij
ij
ij
≠
=
=
=
=
0
Różne od zera są
elementy własne macierzy :
0
≠
ii
H
0
≠
ii
N
0
≠
ii
M
0
≠
ii
L
Współczynniki podmacierzy Jacobiego
różne od zera mają
postać:
2
j
jj
j
j
j
jj
U
B
Q
P
H
⋅
−
−
=
=
δ
∂
∂
j
jj
j
j
j
j
jj
U
G
U
P
U
P
N
⋅
+
=
=
∂
∂
2
j
jj
j
j
j
jj
U
G
P
Q
M
⋅
−
=
=
δ
∂
∂
j
jj
j
j
j
j
jj
U
B
U
Q
U
Q
L
⋅
−
=
=
∂
∂
15
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda van Nessa
Uzyskuje się
macierz Jacobiego
w
postaci
macierzy quazidiagonalnej
o podmacierzach na diagonali stopnia 2x2.
⎥
⎦
⎤
⎢
⎣
⎡
=
jj
jj
jj
jj
j
L
M
N
H
J
j
jj
j
jj
j
U
N
H
P
Δ
δ
Δ
Δ
⋅
+
⋅
=
j
jj
j
jj
j
U
L
M
Q
Δ
δ
Δ
Δ
⋅
+
⋅
=
Po rozwiązaniu mamy gotowe wzory na moduł
i argument napięcia:
jj
jj
jj
jj
j
jj
j
jj
j
L
H
M
N
Q
H
P
M
U
−
⋅
−
⋅
=
Δ
Δ
Δ
jj
jj
j
j
j
H
N
U
P
⋅
−
=
Δ
Δ
δ
Δ
16
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda stałoprądowa
W metodzie stałoprądowej przyjmuje się
następujące założenia upraszczające:
1) Pomija się
rezystancje gałęzi .
2) Nie uwzględnia się
parametrów poprzecznych elementów.
3) Gdy rozpatrywane są
tylko stany o dużym zapasie stabilności, czyli o bardzo
małych rozchyłach kątowych w poszczególnych gałęziach, co można zapisać:
4) Napięcia w węzłach są
równe wartościom znamionowym:
0
=
ij
r
(
)
j
i
j
i
δ
δ
δ
δ
−
≈
−
sin
(
)
1
cos
≈
−
j
i
δ
δ
in
i
U
U
≈
Uwzględnienie wyżej przedstawionych uproszczeń
pozwala na napisanie
wzoru na moc w gałęzi jako:
(
)
j
i
ij
ij
δ
δ
b
U
P
−
⋅
⋅
−
=
2
n
0
=
ij
Q
(
)
j
i
ij
ij
δ
δ
b
P
−
⋅
−
=
pu
pu
ij
ij
x
b
1
−
=
17
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda stałoprądowa
Moc węzłowa w węźle i‐tym wynosi:
(
)
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
⋅
−
−
=
−
⋅
−
=
=
∑
∑
∑
∑
≠
=
≠
=
≠
=
≠
=
w
i
j
j
j
ij
w
i
j
j
ij
i
w
i
j
j
j
i
ij
w
i
j
j
ij
i
δ
b
b
δ
δ
δ
b
P
P
1
pu
1
pu
1
pu
1
pu
pu
)
(
(
)
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
⋅
+
⋅
−
=
∑
≠
=
w
i
j
j
j
ij
i
ii
i
δ
B
δ
B
P
1
Stosując zapis macierzowy, można przedstawić
stałoprądowy model sieci:
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
=
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
w
n
1
ww
wn
w
nw
nn
n
w
n
w
n
δ
δ
δ
B
B
B
B
B
B
B
B
B
P
P
P
M
M
K
K
M
O
M
O
M
K
K
M
O
M
O
M
K
K
M
M
1
1
1
1
11
1
δ
B
P
⋅
−
=
18
OBLICZANIE PRZEPŁYWÓW MOCY.
Metoda stałoprądowa. Uwzględnienie współczynników relaksacji
Macierz susceptancji węzłowych
jest macierzą
osobliwą.
Z
macierzy
susceptancji węzłowych wykreśla się
wiersz i kolumnę
odpowiadające numerowi węzła bilansującego otrzymując nową, nieosobliwą
macierz susceptancji węzłowych . Mamy więc:
B
new
B
(
)
new
new
new
new
new
P
B
P
X
δ
⋅
−
=
⋅
=
−1
Uwzględnienie współczynników relaksacji polega na zmianie obliczonej
poprawki napięciowej o pewną
wartość:
(
)
k
i
k
i
k
i
k
i
k
i
k
i
U
U
k
U
U
k
U
U
1
1
1
1
1
1
1
1
1
−
⋅
+
=
⋅
+
=
+
+
+
Δ
(
)
k
i
k
i
k
i
k
i
k
i
k
i
U
U
k
U
U
k
U
U
2
2
2
2
2
2
1
1
1
−
⋅
+
=
⋅
+
=
+
+
+
Δ
lub
(
)
k
i
k
i
k
i
k
i
k
i
k
i
U
U
k
U
U
k
U
U
−
⋅
+
=
⋅
+
=
+
+
+
1
1
1
Δ
(
)
k
i
k
i
k
i
k
i
k
i
k
i
k
k
δ
δ
δ
δ
Δ
δ
δ
−
⋅
+
=
⋅
+
=
+
+
+
1
1
1
1
>
k
metoda nadrelaksacji,
1
<
k
metoda podrelaksacji.
new
new
new
δ
B
P
⋅
−
=
19
OBLICZANIE PRZEPŁYWÓW MOCY.
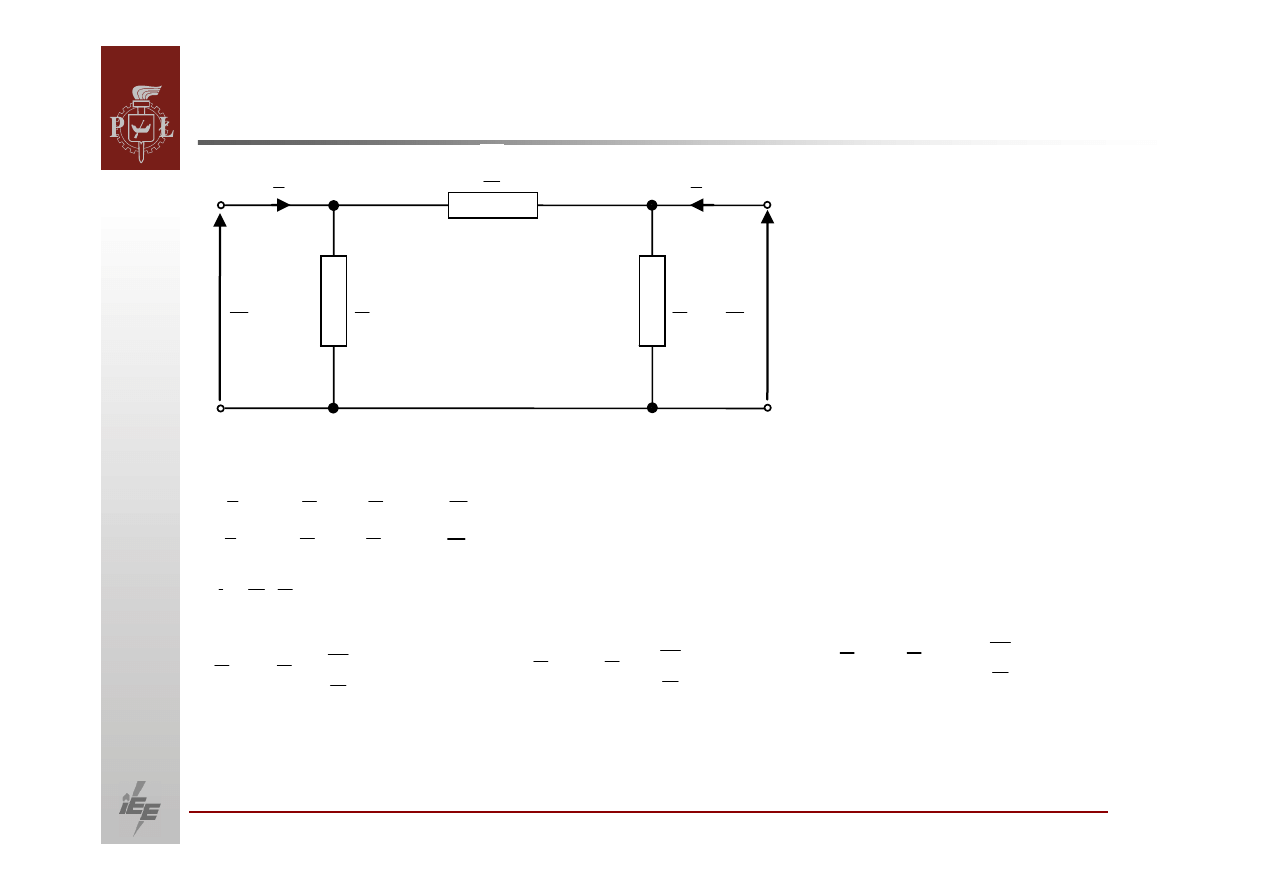
Obliczenia w sieci wielonapięciowej
Z
n
I
m
I
n
Y
m
Y
n
m
n
U
m
U
Równanie potencjałów węzłowych tego elementu jest postaci:
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
m
n
mm
mn
nm
nn
m
n
U
U
Y
Y
Y
Y
I
I
U
Y
I
⋅
=
Z
Y
Y
n
nn
1
+
=
Z
Y
Y
m
mm
1
+
=
Z
Y
Y
mn
nm
1
−
=
=
20
OBLICZANIE PRZEPŁYWÓW MOCY.
Obliczenia w sieci wielonapięciowej
Załóżmy, że węzły n oraz m chcemy mieć
na innym poziomie napięcia:
n
n
n
U
U
ϑ
⋅
=
′
m
m
m
U
U
ϑ
⋅
=
′
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
′
′
m
n
m
n
m
n
U
U
U
U
ϑ
ϑ
0
0
U
T
U
⋅
=
'
⎥
⎦
⎤
⎢
⎣
⎡
=
m
n
ϑ
ϑ
0
0
T
Zależność
między prądami węzłowymi na starym i nowym poziomie napięcia
będą
postaci:
( )
( )
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
−
∗
−
∗
m
n
m
n
m
n
I
I
I
I
1
1
'
'
0
0
ϑ
ϑ
( )
I
T
I
⋅
=
−
∗ 1
'
21
OBLICZANIE PRZEPŁYWÓW MOCY.
Obliczenia w sieci wielonapięciowej
Wyjściowe równanie potencjałów węzłowych przeliczamy na nowe poziomy
napięć
następująco:
( )
( )
( )
U
T
T
Y
T
I
T
⋅
⋅
⋅
⋅
=
⋅
−
−
∗
−
∗
1
1
1
otrzymując:
'
'
'
U
Y
I
⋅
=
( )
( )
1
1
'
−
−
∗
⋅
⋅
=
T
Y
T
Y
∗
⋅
⋅
=
T
Z
T
Z
'
lub po odwróceniu macierzy :
'
Y
Podstawiając elementy macierzy admitancyjnej otrzymamy macierz
admitancyjną
sieci sprowadzoną:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⋅
⋅
⋅
⋅
⋅
=
∗
∗
2
2
'
1
1
1
1
m
m
m
m
n
n
m
m
n
m
n
n
n
n
Y
Y
Y
Y
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
Y
22
OBLICZANIE PRZEPŁYWÓW MOCY.
Obliczenia w sieci wielonapięciowej
Powyższa macierz jest niesymetryczna, nie posiada, więc swego odpowiednika
w postaci obwodu elektrycznego pasywnego jak wyjściowa macierz
admitancyjna.
Gdy przekładnie sprowadzenia są
liczbami rzeczywistymi to:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⋅
⋅
⋅
⋅
⋅
=
2
2
'
1
1
1
1
m
m
m
m
n
n
m
m
n
m
n
n
n
n
Y
Y
Y
Y
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
Y
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
⋅
⋅
−
⋅
⋅
−
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
2
2
'
1
1
1
1
1
1
1
1
m
m
m
n
m
n
n
n
Z
Y
Z
Z
Z
Y
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
Y
Macierz admitancyjna
sieci sprowadzana jest teraz symetryczna.
Gdy:
ϑ
ϑ
ϑ
=
=
m
n
23
OBLICZANIE PRZEPŁYWÓW MOCY.
Obliczenia w sieci wielonapięciowej
Macierz admitancyjna
sieci sprowadzona jest postaci:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
⋅
−
⋅
−
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
2
2
2
2
'
1
1
1
1
1
1
1
1
ϑ
ϑ
ϑ
ϑ
Z
Y
Z
Z
Z
Y
m
n
Y
Typowym wariantem przekształcenia sprowadzenia, jest jego zastosowanie
dla gałęzi z transformatorem. Założono, że impedancje gałęzi obliczono na
poziomie napięcia węzła n a przekładnia
transformatora zdefiniowano, jako:
m
n
T
U
U
=
ϑ
Wtedy mamy:
1
=
n
ϑ
T
m
ϑ
ϑ
1
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
⋅
−
⋅
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
∗
2
'
1
1
1
1
T
m
T
T
n
Z
Y
Z
Z
Z
Y
ϑ
ϑ
ϑ
Y
24
OBLICZANIE PRZEPŁYWÓW MOCY.
Obliczenia w sieci wielonapięciowej
W przypadku, gdy zainstalowany transformator posiada tylko regulację
podłużną, tzn.:
T
T
ϑ
ϑ
=
Macierz admitancyjna
tej gałęzi wyraża się
wzorem:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
⋅
−
⋅
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
2
'
1
1
1
1
T
m
T
T
n
Z
Y
Z
Z
Z
Y
ϑ
ϑ
ϑ
Y
Moc w gałęzi łączącej węzły m oraz n wynosi:
∗
∗
∗
∗
∗
⋅
+
⋅
⋅
−
=
n
n
T
m
n
n
n
Y
U
Z
U
U
Z
U
S
2
2
ϑ
2
2
2
2
T
m
m
T
n
m
T
m
m
Y
U
Z
U
U
Z
U
S
ϑ
ϑ
ϑ
⋅
⋅
+
⋅
⋅
−
⋅
=
∗
∗
∗
∗
Document Outline
- SYSTEMY ELEKTROENERGETYCZNE Rozdział 3 OBLICZANIE ROZPŁYWÓW MOCY
- OBLICZANIE PRZEPŁYWÓW MOCY. Rozpływ mocy w zamkniętej sieci elektroenergetycznej
- OBLICZANIE PRZEPŁYWÓW MOCY. Rozpływ mocy w zamkniętej sieci elektroenergetycznej
- OBLICZANIE PRZEPŁYWÓW MOCY. Rozpływ mocy w zamkniętej sieci elektroenergetycznej
- OBLICZANIE PRZEPŁYWÓW MOCY. Rozpływ mocy w zamkniętej sieci elektroenergetycznej
- OBLICZANIE PRZEPŁYWÓW MOCY. Rozpływ mocy w zamkniętej sieci elektroenergetycznej
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda Gaussa
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda Gaussa
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda klasyczna Newtona-Raphsona
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda klasyczna Newtona-Raphsona
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda klasyczna Newtona-Raphsona
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda klasyczna Newtona-Raphsona
- OBLICZANIE PRZEPŁYWÓW MOCY. Zmodyfikowana i rozłączna metoda Newtona
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda Stotta, metoda van Nessa
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda van Nessa
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda stałoprądowa
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda stałoprądowa
- OBLICZANIE PRZEPŁYWÓW MOCY. Metoda stałoprądowa. Uwzględnienie współczynników relaksacji
- OBLICZANIE PRZEPŁYWÓW MOCY. Obliczenia w sieci wielonapięciowej
- OBLICZANIE PRZEPŁYWÓW MOCY. Obliczenia w sieci wielonapięciowej
- OBLICZANIE PRZEPŁYWÓW MOCY. Obliczenia w sieci wielonapięciowej
- OBLICZANIE PRZEPŁYWÓW MOCY. Obliczenia w sieci wielonapięciowej
- OBLICZANIE PRZEPŁYWÓW MOCY. Obliczenia w sieci wielonapięciowej
- OBLICZANIE PRZEPŁYWÓW MOCY. Obliczenia w sieci wielonapięciowej
Wyszukiwarka
Podobne podstrony:
Kanicki Systemy Rozdzial 5 id 2 Nieznany
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdział 6
Architekrura Systemow Lab4 id 6 Nieznany
Kanicki Systemy Rozdział 2
Kanicki Systemy Rozdział 7
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdział 6
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdział 3
Kanicki Systemy Rozdział 5
opis systemu vendoHotel id 3370 Nieznany
o systemie oceny zgodnosci id 3 Nieznany
więcej podobnych podstron