1
SYSTEMY ELEKTROENERGETYCZNE
Rozdział
4
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO
Łódź, 2011 rok
Andrzej Kanicki
2
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Pojęcia stabilności
Stabilność
lokalna systemu elektroenergetycznego (SE) to stabilność
jego pracy
podczas małych zakłóceń.
Do tych zakłóceń
można zaliczyć:
1.
załączanie, wyłączanie małych odbiorów,
2.
załączanie, wyłączanie pojedynczych generatorów,
3.
załączanie, wyłączanie pojedynczych linii,
4.
działanie układów regulacji napięcia i częstotliwości.
Definicja stabilności
Rozwiązanie równania różniczkowego lub układu równań
różniczkowych
nazywamy stabilnym (stabilnym
w sensie Lapunowa), jeżeli dla dowolnego
i
dowolnego
czasu można dobrać
taką
liczbę
, że dla wszystkich
punktów startowych spełniających ograniczenie:
zachodzi:
dla każdego .
( )
t
x
1
0
>
ε
0
t
η
η
<
−
)
(
)
(
0
1
0
2
t
x
t
x
ε
<
−
)
(
)
(
1
2
t
x
t
x
0
t
t
>
3
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Pojęcia stabilności
t
0
t
ε
ε
η
( )
t
x
Definicja stabilności asymptotycznej
Rozwiązanie równania różniczkowego lub układu równań
różniczkowych
nazywamy stabilnym asymptotycznie, jeżeli jest stabilne a ponadto:
( )
t
x
1
0
)
(
)
(
lim
0
1
0
2
=
−
∞
→
t
x
t
x
t
4
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Pojęcia stabilności
Załóżmy, że system elektroenergetyczny opisano za pomocą
układu równań
różniczkowych nieliniowych postaci:
Niech będzie punktem, dla którego mamy:
Funkcję
nieliniową
możemy zlinearyzować
w pewnym otoczeniu punktu
. W tym celu funkcję
rozwiniemy w szereg Taylora do postaci:
W wyniku pominięcia reszty z rozwinięcia w szeregu Taylora otrzymaliśmy
opis naszego obiektu za pomocą
układu równań
różniczkowych liniowych
postaci:
)
(X
F
X =
dt
d
r
X
0
)
(
=
r
X
F
)
(X
F
r
X
)
(X
F
)
(
)
(
X
R
X
A
X
F
+
⋅
=
X
A
X
⋅
=
dt
d
5
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Pojęcia stabilności
gdzie:
Powyższe równanie jest przybliżeniem liniowym układu równań
różniczkowych
nieliniowych a cała operacja operacją
linearyzacji.
Do równania nieliniowego i jego przybliżenia liniowego słuszne są
następujące
twierdzenia tzw. pierwszej metody Lapunowa.
Twierdzenie 1
Układ równań
różniczkowych nieliniowych jest stabilny asymptotycznie
lokalnie tzn. w otoczeniu punktu linearyzacji, jeśli jego przybliżenie liniowe jest
stabilne asymptotycznie.
Twierdzenie 2
Układ równań
różniczkowych nieliniowych jest niestabilny jeśli jego
przybliżenie liniowe jest niestabilne.
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
=
n
n
n
n
x
f
x
f
x
f
x
f
d
d
∂
∂
∂
∂
∂
∂
∂
∂
L
M
O
M
L
1
1
1
1
X
F
A
6
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Pojęcia stabilności
Twierdzenie 3
O stabilności układu równań
różniczkowych nieliniowych nie można nic
wnioskować
jeśli jego przybliżenie liniowe jest stabilne ale nie asymptotycznie.
Musimy rozważyć
problem czy układ równań
różniczkowych liniowych
jest stabilny.
W tym celu musimy obliczyć
wartości własne macierzy .
Znając wartości własne możemy rozwiązanie układu równań
różniczkowych
liniowych zapisać
jako:
O stabilności rozważanego układu równań
różniczkowych liniowych możemy
wnioskować
w oparciu o poniższe twierdzenie.
i
λ
A
0
)
(
det
=
⋅
−
1
A
i
λ
( )
∑
=
⋅
=
n
j
t
ij
i
i
e
a
t
x
1
λ
7
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Pojęcia stabilności
Twierdzenie 4
Układ równań
różniczkowych liniowych jest stabilny wtedy i tylko wtedy, kiedy
wszystkie wartości własne macierzy mają
niedodatnie części rzeczywiste.
Twierdzenie 5
Układ równań
różniczkowych liniowych jest stabilny asymptotycznie wtedy i
tylko wtedy, kiedy wszystkie wartości własne macierzy mają
ujemne części
rzeczywiste.
A
A
8
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
Należy określić
układ równań
różniczkowych opisujących system
elektroenergetyczny w
stanach
przejściowych.
Podstawą
określenia przybliżonego modelu matematycznego systemu
elektroenergetycznego będzie analiza stałych czasowych przebiegów
powstających w stanach przejściowych. Najprostszy model musi
uwzględniać
zjawiska o najdłuższej stałej czasowej pomijając zjawiska
o
krótkich
stałych czasowych czyli zakładamy, że zjawiska te są
bezinercyjne.
W wysokonapięciowym
systemie elektroenergetycznym mamy do czynienia
z
dwoma
rodzajami elementów:
1.
urządzenia przesyłowo‐rozdzielcze, stała czasowa składowej aperiodycznej
nie większa niż
0,2 s, i nie wywołuje znaczących momentów działających na
wał
generatora,
2.
generatory, w których można wyróżnić
następujące elementy wraz z ich
stałymi czasowymi:
•
uzwojenia stojana, których stała czasowa składowej aperiodycznej jest
nie większa niż
0,2s,
•
uzwojenia tłumiące, stała czasowa nie większa niż
0,2 s,
"
d
T
9
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
•
uzwojenia wzbudzenia, stała czasowa ,
•
wirująca masa wirnika, stała czasowa .
s
T
d
)
6
,
0
6
(
÷
=
′
s
T
m
)
12
4
(
÷
=
W pierwszym przybliżeniu, będziemy modelować
generator jako układu równań
różniczkowych opisujących dynamikę
mas wirujących wirnika.
Energia kinetyczna mas wirujących jest zdefiniowana wzorem:
Zgodnie z zasadą
zachowania energii mamy, że w każdej chwili zamianie mocy
działających na wirnik a więc mocy mechanicznej i elektrycznej
towarzyszy zmiana energii kinetycznej, czyli:
k
E
2
2
ω
⋅
=
J
E
k
m
P
e
P
e
m
k
P
P
t
d
E
d
−
=
ei
mi
i
i
i
P
P
t
d
d
J
−
=
⋅
⋅
ω
ω
10
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
Mamy także:
t
d
d
i
i
δ
ω
=
mi
i
mi
M
P
⋅
=
ω
ei
i
ei
M
P
⋅
=
ω
oraz fakt występowania momentu (mocy) tłumiącego to otrzymamy:
Di
M
Di
ei
mi
i
i
M
M
M
dt
d
J
−
−
=
⋅
2
2
δ
Równanie ruchu obrotowego wirnika i‐tego generatora zapiszemy też
jako
układ równań:
i
i
dt
d
ω
δ
=
Di
ei
mi
i
i
M
M
M
dt
d
J
−
−
=
⋅
ω
lub
dt
d
D
P
P
dt
d
J
i
i
ei
mi
i
i
i
δ
ω
ω
⋅
−
−
=
⋅
⋅
11
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
Moment bezwładności wirnika generatora można wyrazić
w funkcji
mechanicznej stałej czasowej :
m
T
2
S
N
m
S
T
J
ω
⋅
=
Mechaniczna stała czasowa ma interpretację
fizyczną. Jeśli pominiemy
tłumienie i do nieruchomego wirnika nieobciążonego generatora przyłożymy
znamionowy moment turbiny to przyspieszenie wirnika jest następujące:
W skutek działania takiego przyspieszenia prędkość
rośnie liniowo i po czasie
wirnik generatora uzyskuje prędkość
synchroniczną.
W przypadku rozważania najprostszego układu pracy generatora, układu
generator‐sieć
sztywna równanie ruchu wirnika generatora są
postaci:
m
S
mN
mN
S
m
S
S
mN
N
m
S
S
T
M
M
T
M
S
T
dt
d
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
δ
ε
=
⋅
⋅
⋅
⋅
⋅
=
⋅
⋅
⋅
⋅
=
=
2
2
m
T
t
=
dt
d
D
)
sin(
Z
U
E
sin
Z
E
P
dt
d
J
i
i
ii
i
s
di
ii
di
mi
i
i
i
δ
α
δ
α
δ
ω
⋅
−
−
⋅
⋅
−
⋅
−
=
⋅
⋅
2
2
2
12
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
Przy pominięciu rezystancji w obwodzie mamy:
Kołysania wirnika generatora przy chwilowym zaburzeniu bilansu mocy
czynnej
Wprowadzimy pojęcie współczynnika bezwładności:
Wtedy równanie ruchu wirnika generatora ma postać:
Pierwszy składnik powyższego równania możemy zapisać:
dt
d
D
X
U
E
P
dt
d
J
i
i
i
s
di
mi
i
i
i
δ
δ
δ
ω
⋅
−
⋅
⋅
−
=
⋅
⋅
sin
2
2
i
i
i
J
M
ω
⋅
=
dt
d
M
D
M
P
P
dt
d
i
i
i
i
ei
mi
i
δ
δ
⋅
−
−
=
2
2
i
i
i
i
ei
i
mi
ei
H
d
dP
P
P
P
δ
Δ
δ
Δ
δ
Δ
⋅
=
⋅
=
=
−
13
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania wirnika generatora
Równanie ruchu wirnika generatora linearyzujemy wokół
rozważanego
pewnego kąta początkowego . Uwzględniając to mamy:
lub w postaci:
gdzie:
Ogólne rozwiązanie równania ruchu wirnika generatora i jego pochodne są
postaci:
0
)
0
(
δ
δ
Δ
=
=
t
0
2
2
=
⋅
+
⋅
+
i
i
i
i
i
i
i
M
H
dt
d
M
D
dt
d
δ
Δ
δ
Δ
δ
Δ
0
2
2
=
⋅
+
⋅
+
i
i
i
i
i
h
dt
d
d
dt
d
δ
Δ
δ
Δ
δ
Δ
i
i
i
M
D
d
=
i
i
i
M
H
h
=
t
e
A
λ
δ
Δ
⋅
=
t
e
A
dt
d
λ
λ
δ
Δ
⋅
⋅
=
t
e
A
dt
d
λ
λ
δ
Δ
⋅
⋅
=
2
2
2
14
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania wirnika generatora
Po podstawieniu tych funkcji do równania ruch wirnika generatora
otrzymujemy:
Równanie to nazywane jest równaniem charakterystycznym równania ruch
wirnika generatora.
Rozwiązania tego równania są
następujące:
Powyższe wielkości to wartości własne układu.
W zależności od wartości wyrażenia pod pierwiastkiem, wartości własne
oraz mogą
być
rzeczywiste lub zespolone.
Rozwiązanie równania różniczkowego jest postaci:
0
2
=
+
⋅
+
h
d
λ
λ
2
4
2
4
2
2
2
1
h
d
d
h
d
d
⋅
−
+
−
=
⋅
−
−
−
=
λ
λ
1
λ
2
λ
t
t
e
A
e
A
2
1
2
1
λ
λ
δ
Δ
⋅
+
⋅
=
15
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania wirnika generatora
Musimy teraz wyznaczyć
stałe i .
W wyniku rozwiązania powyższego układu równań
mamy:
Ogólna postać
rozwiązania:
Zakładając, że:
Wartości własne są
zmiennymi zespolonymi o postaci:
1
A
2
A
0
2
2
1
1
0
2
1
=
⋅
+
⋅
=
+
A
A
A
A
λ
λ
δ
1
2
1
0
2
1
2
2
0
1
λ
λ
λ
δ
λ
λ
λ
δ
−
⋅
−
=
−
⋅
=
A
A
(
)
t
t
e
e
2
1
2
1
2
0
1
λ
λ
λ
λ
λ
λ
δ
δ
Δ
⋅
−
⋅
⋅
−
=
0
>
d
h
d
⋅
< 4
2
w
w
j
j
ω
α
λ
ω
α
λ
+
−
=
−
−
=
2
1
2
4
2
2
d
h
d
w
−
⋅
=
=
ω
α
16
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
Rozważymy wszystkie możliwe przypadki tego rozwiązania:
1.
gdy
9 gdy
9 gdy
Wartości własne oraz są
teraz zmiennymi rzeczywistymi.
2.
gdy
Wartości własne są
teraz zmiennymi rzeczywistymi a rozwiązanie
ma
postać:
Kąt rośnie aperiodycznie a więc taki punkt jest punktem niestabilnym.
0
>
h
0
>
h
h
d
⋅
< 4
2
(
)
(
)
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⋅
+
⋅
⋅
⋅
=
−
t
t
e
w
w
w
t
ω
ω
α
ω
δ
δ
Δ
α
sin
cos
0
h
d
⋅
> 4
2
0
0
2
1
<
<
λ
λ
0
<
h
0
0
2
1
>
<
λ
λ
δ
17
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Model matematyczny systemu elektroenergetycznego
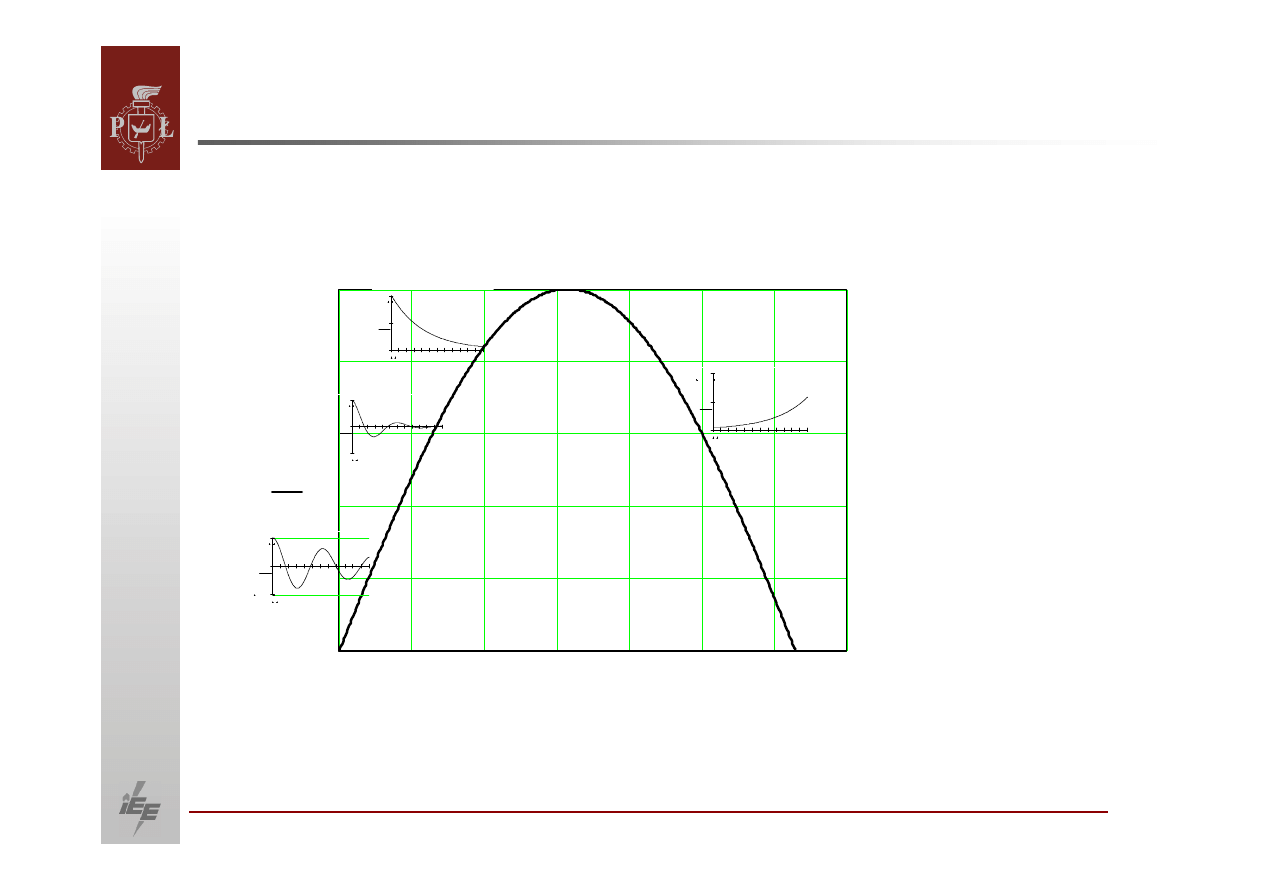
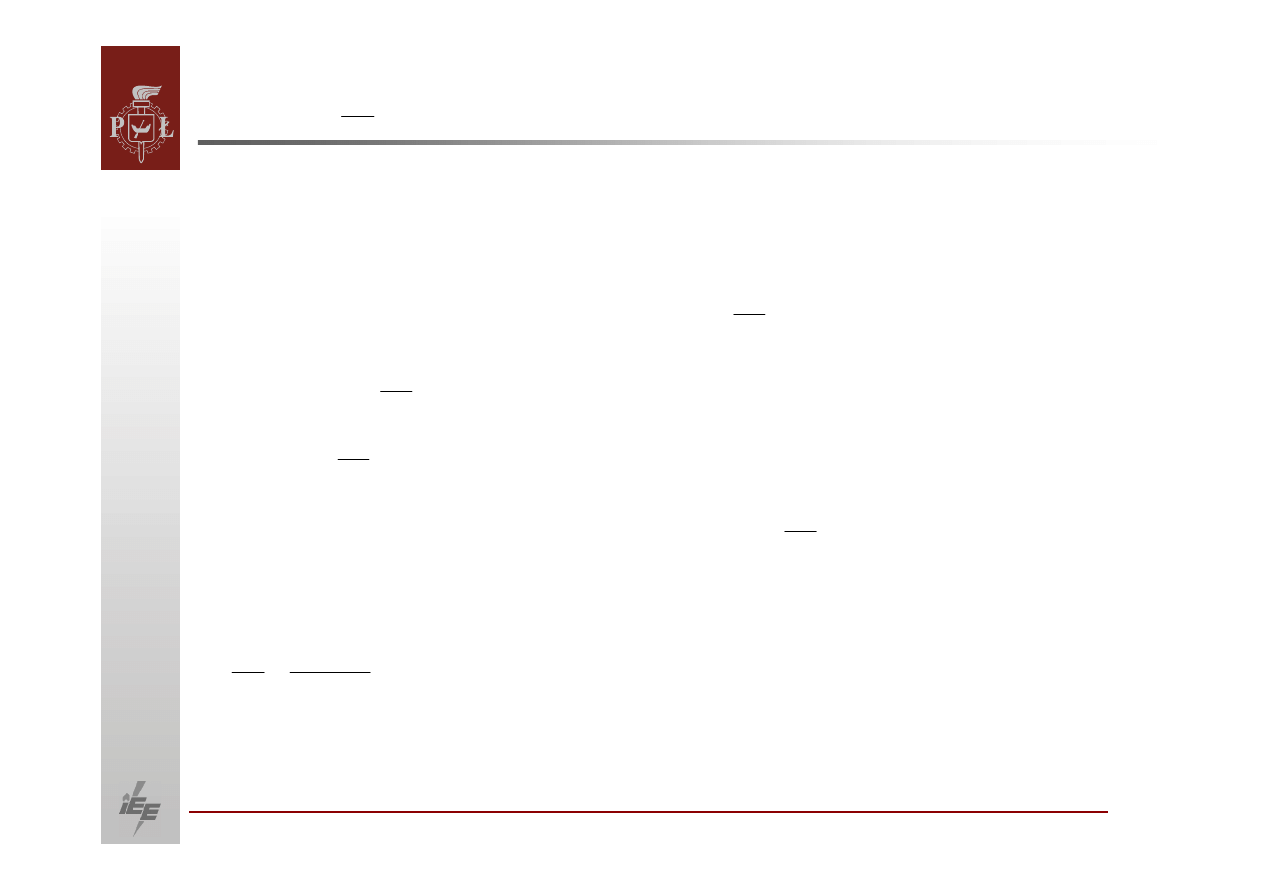
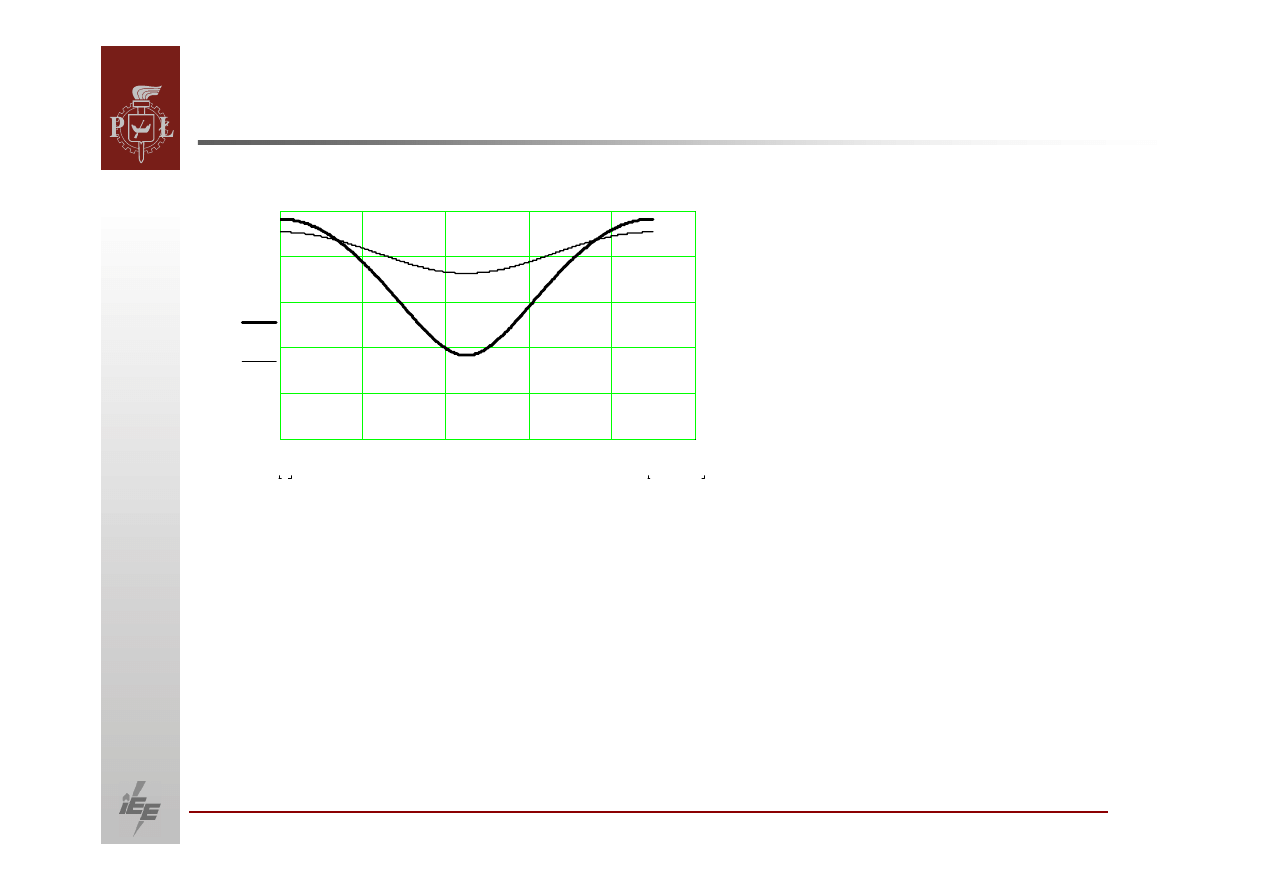
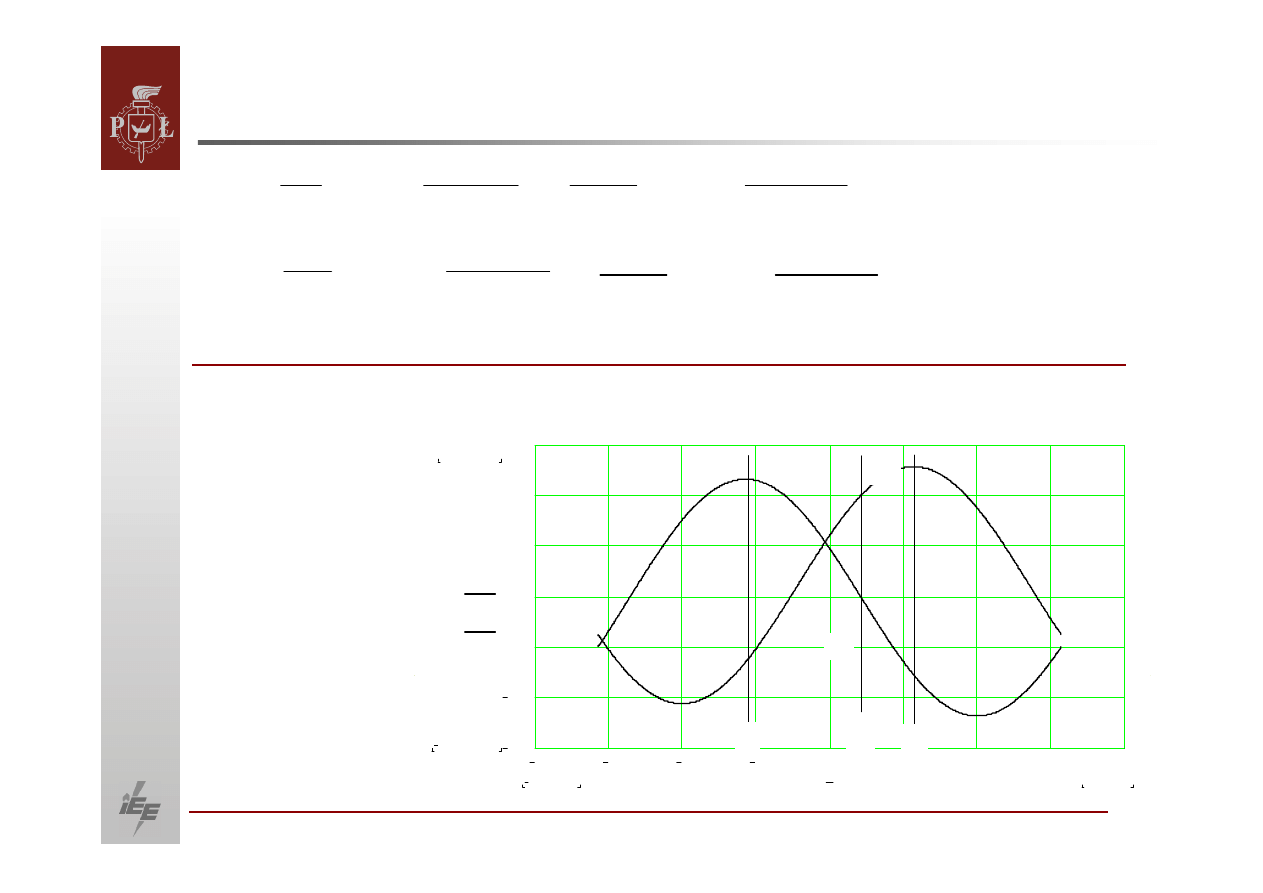
Przykładowe przebiegi kąta po małym zakłóceniu w różnych punktach pracy
generatora.
0
0.5
1
1.5
2
2.5
3
3.5
0
1
2
3
4
5
P1
i
δ i⋅
1
0.781
−
δ
i
1
0
α i⋅
1
0
δ
i
12
0
α i
⋅
20.086
0
δ
i
12
0
α i
⋅
1
1
−
δ
i
12
0
α i
⋅
18
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
δ
d
P
d
W przypadku rozważenia układu generator – sieć
sztywna pominiemy w
pierwszym etapie rezystancje układu. Wtedy:
δ
sin
⋅
⋅
=
E
s
g
e
X
U
E
P
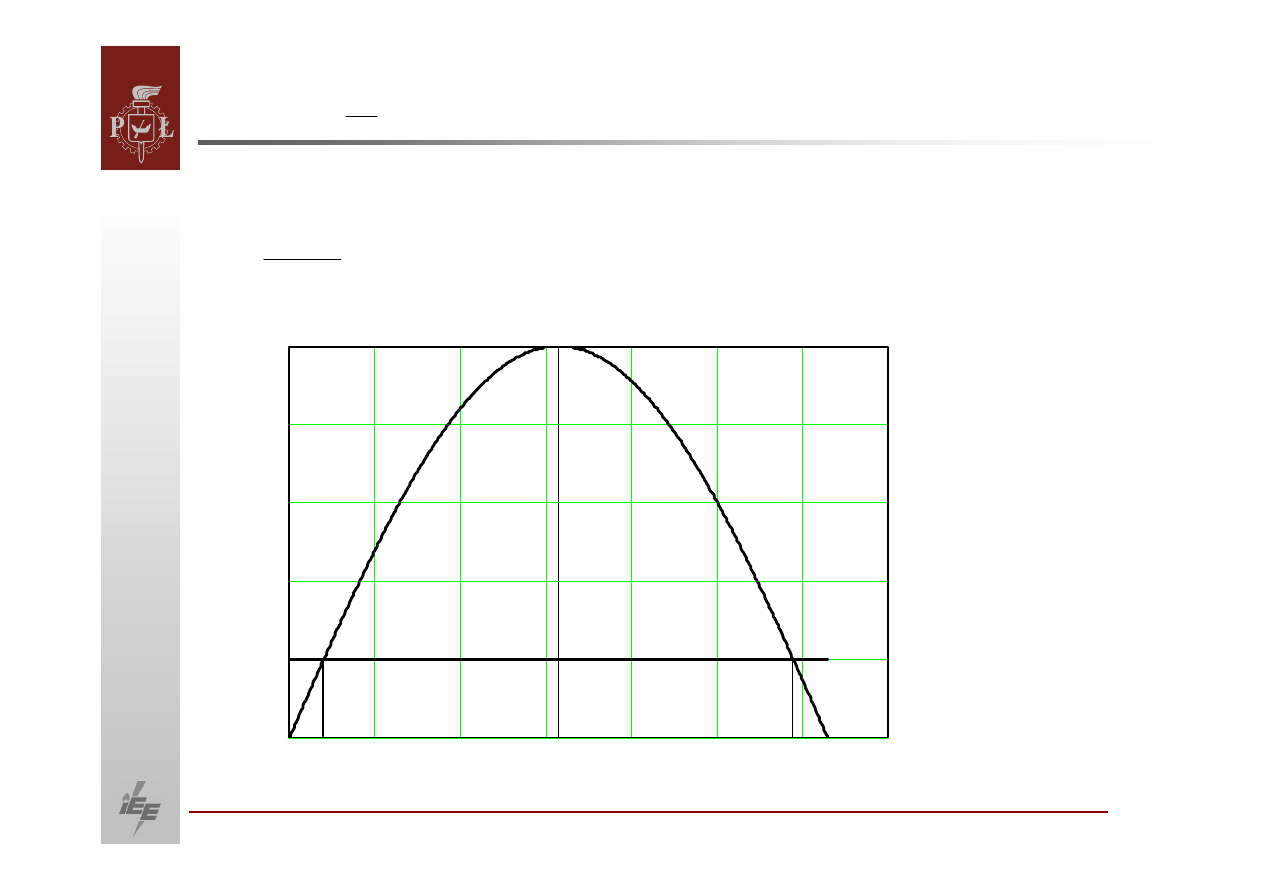
A
B
0
δ
m
P
0
δ
Π
−
e
P
δ
gr
δ
0
0.5
1
1.5
2
2.5
3
3.5
0
1
2
3
4
5
P1
i
P2
i
δ i
P
19
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
δ
d
P
d
W przypadku, gdy momenty mechaniczny jest równy mocy
elektromagnetycznej tzn.
wirnik obraca się
ze stałą
prędkością
obrotową.
Gdy
to wirnik zmniejsza lub zwiększa swoją
prędkość.
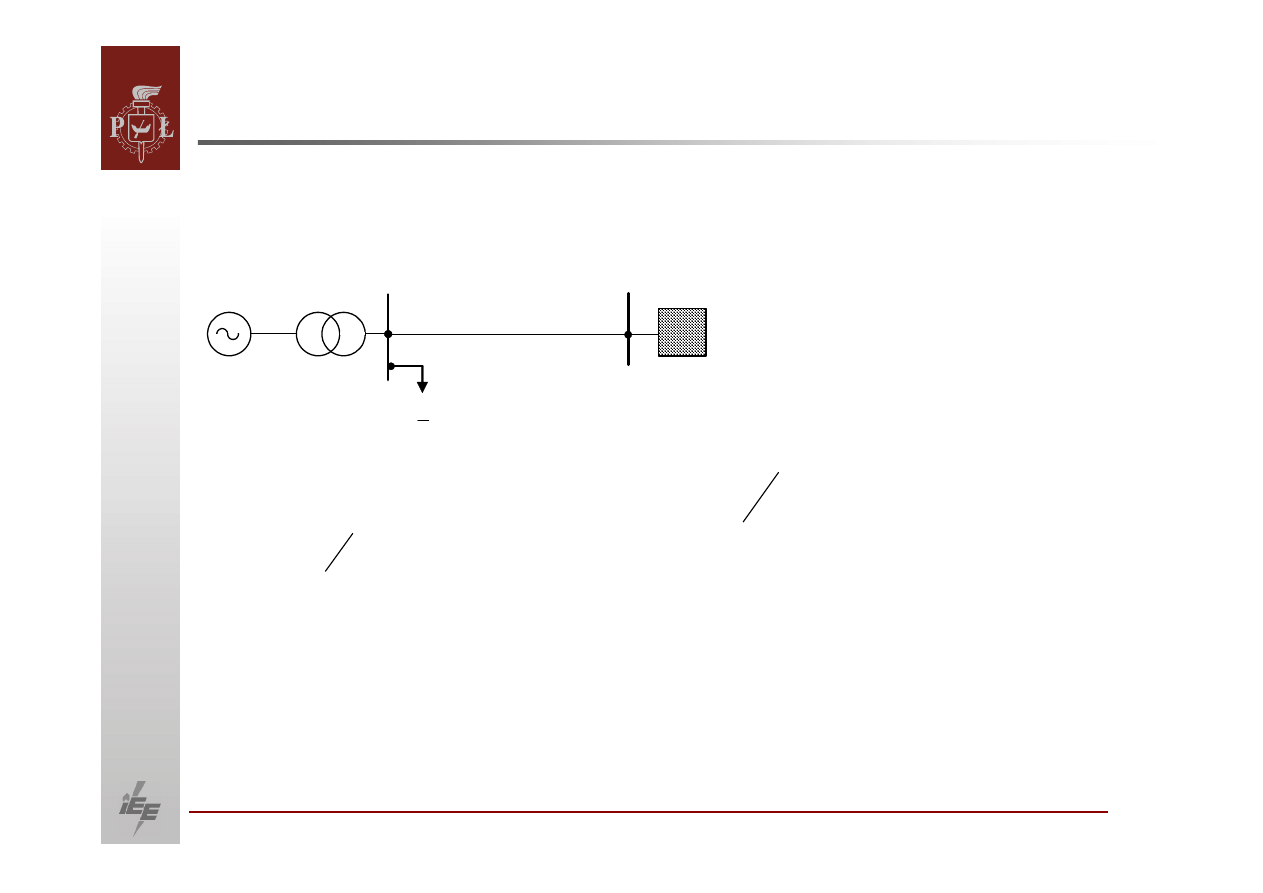
W pewnej chwili został
dołączony do rozpatrywanej sieci nowy odbiór o mocy ,
przy czym odbiór ten jest załączony na pewien krótki czas – załączenie to ma
charakter zakłócenia. Wtedy
i
wirnik będzie hamowany czyli zacznie maleć
jego prędkość
obrotowa.
0
=
+
e
m
M
M
0
=
+
e
m
P
P
0
≠
+
E
m
P
P
e
e
e
P
P
P
Δ
+
=
1
m
e
P
P
>
1
m
e
M
M
>
1
20
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
δ
d
P
d
Mamy teraz dwie różne sytuacje:
1.
Praca w punkcie A
Dołączenie dodatkowej mocy powoduje, że generator znajduje się
w
punkcie
2.
Wirnik będzie hamowany, czyli zacznie maleć
jego prędkość
obrotowa
wywołując zmniejszenie kąta i
w
konsekwencji
zmniejszenie mocy
przesyłanej z generatora do sieci sztywnej zgodnie z charakterystyką.
A
2
3
4
5
m
P
e
P
ω
δ
a)
b)
1
1
P1
i
12
0
δ i.
1
0
1
ω
Δ
e
P
Δ
δ
Δ
21
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
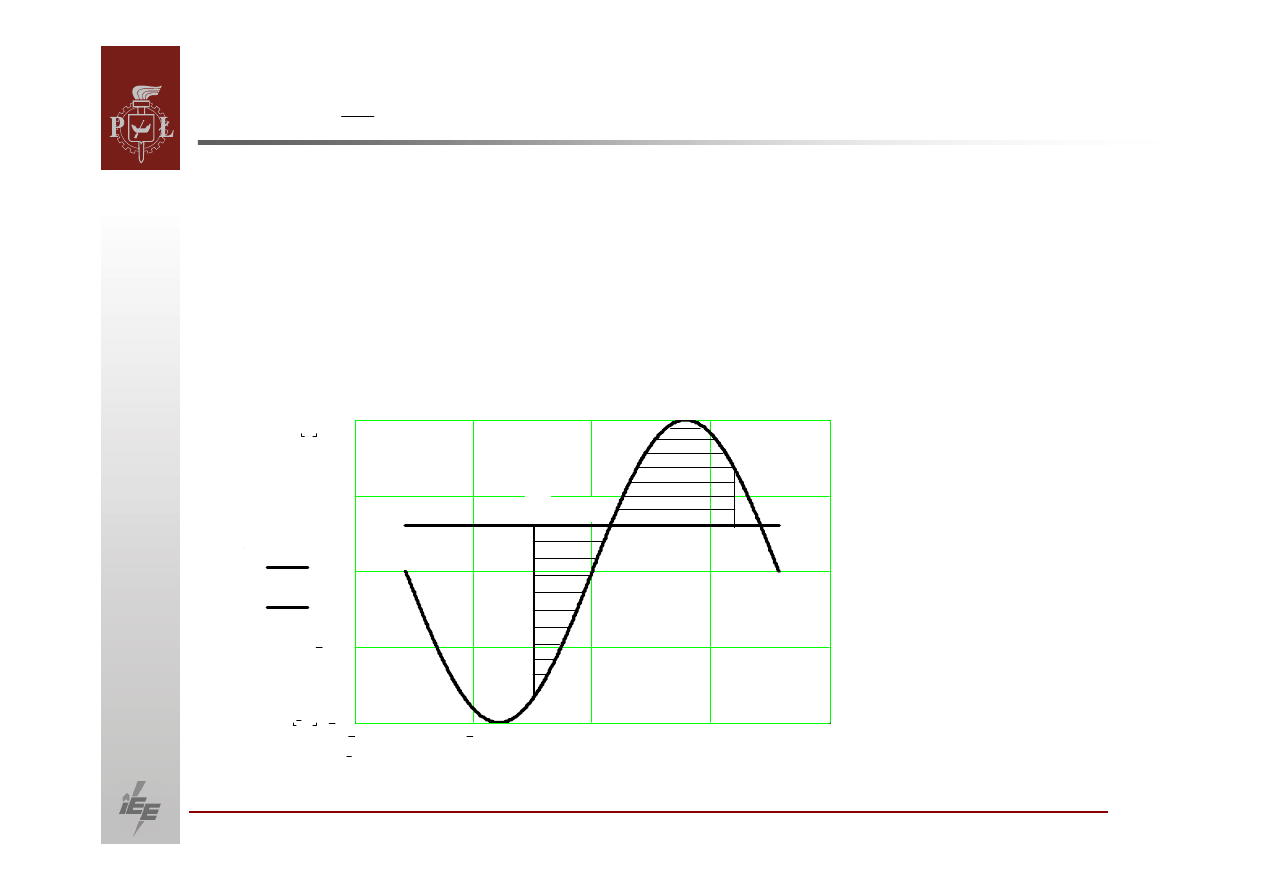
Wtedy moc niezbilansowana maleje. W punkcie
A moc elektryczna
i
mechaniczna
są
sobie równe, lecz ruch wirnika nie zostanie zatrzymany.
W trakcie swojej drogi od punktu 2 do A w wirniku została zgromadzona
pewna ilość
energii kinetycznej hamującej a prędkość
obrotowa jest
mniejsza od synchronicznej.
Energia kinetyczna hamująca wynosi:
Zakładają, że zmiany prędkości obrotowej są
niewiele różne od
synchronicznej to energia kinetyczna hamując jest proporcjonalna do
pola powierzchni A, 2, 3.
Po minięciu punktu A prędkość
zacznie rosnąć. Teraz wirnik wychyli się
do
punktu 5 gromadząc po drodze energię
kinetyczną
przyspieszającą.
Położenie punktu 5 wynika z równości
energii kinetycznej hamującej
i przyspieszającej. Można, więc stwierdzić, że pole powierzchni A, 5, 4
musi być
równe polu A, 2, 3.
(
)
∫
⋅
−
=
t
d
P
P
E
e
m
kh
Δ
(
)
(
)
∫
∫
⋅
−
⋅
=
⋅
−
=
δ
ω
δ
ω
Δ
d
P
P
d
P
P
E
e
m
e
m
kh
1
δ
d
P
d
22
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
Ten wywód nosi nazwę
metody równych powierzchni.
W punkcie 5 zrównały się
energie kinetyczne hamująca i przyspieszająca,
lecz mamy różnicę
mocy. Moc napędowa jest większa od hamującej i wirnik
będzie przyspieszał
dalej.
2.
Praca w punkcie B
1
1
P1
i
Pm
i
4
4
δ j
i
.
4
2
0
2
4
1
0.5
0
0.5
1
A
B
2
3
4
5
δ
d
P
d
23
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
Dołączenie dodatkowej mocy powoduje, że generator znajduje się
w
punkcie
2.
Wirnik będzie hamowany, czyli zacznie maleć
jego prędkość
obrotowa
wywołując zmniejszenie kąta i
w
konsekwencji
powiększenie mocy
przesyłanej z generatora do sieci sztywnej zgodnie z charakterystyką.
Wtedy moc niezbilansowana
wzrośnie. W punkcie
A moc elektryczna i
mechaniczna
są
sobie równe, lecz
ruch wirnika nie zostanie zatrzymany. W trakcie swojej drogi od punktu 2
do A w wirniku została zgromadzona pewna ilość
energii kinetycznej
hamującej (pole 3, 2, A) a prędkość
obrotowa jest mniejsza od
synchronicznej. W tym wypadku ustali jednak się
nowy stabilny punkt
pracy, punkt A, lecz nie będzie to wyjściowy punkt B.
Następny przypadek to odłączenie od rozpatrywanej sieci odbioru o mocy
( )
e
z
e
m
P
P
P
Δ
δ
−
−
e
P
Δ
δ
d
P
d
24
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
0.999995
1
P1
i
Pm
i
8
0
δ i.
0
1
2
3
4
5
6
7
8
1
0
1
A
B
2
3
C
Moc elektryczna jest mniejsza od mocy mechanicznej wirnik będzie
przyspieszany, czyli zacznie rosnąć
prędkość
obrotowa.
Powiększenie kąta powoduje powiększenie mocy przesyłanej z generatora
do sieci sztywnej. Wtedy moc niezbilansowana wzrośnie co prowadzi do
destabilizacji pracy maszyny. W tym wypadku nie ustali jednak się
nowy
stabilny punkt pracy a prędkość
wirnika będzie rosła w nieskończoność.
δ
d
P
d
25
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
Reasumując powyższe rozważania o zmianach mocy elektrycznej można
stwierdzić, że:
9Punkt A jest punktem pracy stabilnej.
9Punkt B jest punktem pracy niestabilnej.
9Stabilna praca jest tylko na odcinku, gdzie .
9Gdy wartość
praca generatora jest niestabilna.
9Warunek jest kryterium określania granicy równowagi statycznej.
9Granica równowagi statycznej występuje, gdy .
Pochodną
mocy po kącie:
nazywamy mocą
synchronizującą
generatora. Moc synchronizująca jest miarą
zapasu stabilności generatora.
0
≥
δ
d
dP
0
<
δ
d
dP
δ
d
dP
0
=
δ
d
dP
δ
δ
cos
⋅
⋅
=
E
S
g
X
U
E
d
dP
δ
d
P
d
26
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
Dotychczas analizowano generator, gdy brak jest działania jego regulatorów
wzbudzenia. Wtedy granicę
równowagi statycznej nazywamy naturalną
granicą
równowagi statycznej. Rozważmy teraz układ, w którym generator jest jednak
wyposażony w regulator wzbudzenia. Regulator wzbudzenia stara się
utrzymać
stałe napięcie generatora poprzez zmianę
napięcia wzbudzenia
z
ograniczeniami
wynikającymi z
dopuszczalnego
jego zakresu pracy.
Rozważany regulator wzbudzenia może być: powolny lub Szybki.
Jako regulator szybki będziemy uważali taki regulator, który utrzymuje stałą
wartość
napięcia na zaciskach generatora bezpośrednio po zmianie obciążenia.
W regulatorze powolnym po zmianie obciążenia z wartości
(punkt A) do
następuje zmiana kąta zgodnie z wyjściową
charakterystyką
(punkt B)
a dopiero później regulator zwiększa napięcie wzbudzenia tak, aby napięcie na
zaciskach generatora było stałe. Zmiana napięcia wzbudzenia powoduje
powiększenie siły elektromotoryczne generatora w efekcie charakterystyki .
Generatora znajdzie się
w
punkcie
C. Kolejne etapy pracy są
więc następujące:
zwiększenie obciążenia przy stałym wzbudzeniu i zwiększenie napięcia
wzbudzenia.
0
P
1
P
( )
δ
P
δ
d
P
d
27
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
5
0
P1
i
P3
i
P4
i
P2
i
3.141593
0
δ i.
0
0.5
1
1.5
2
2.5
3
3.5
0
1
2
3
4
5
B
C
A
0
P
1
P
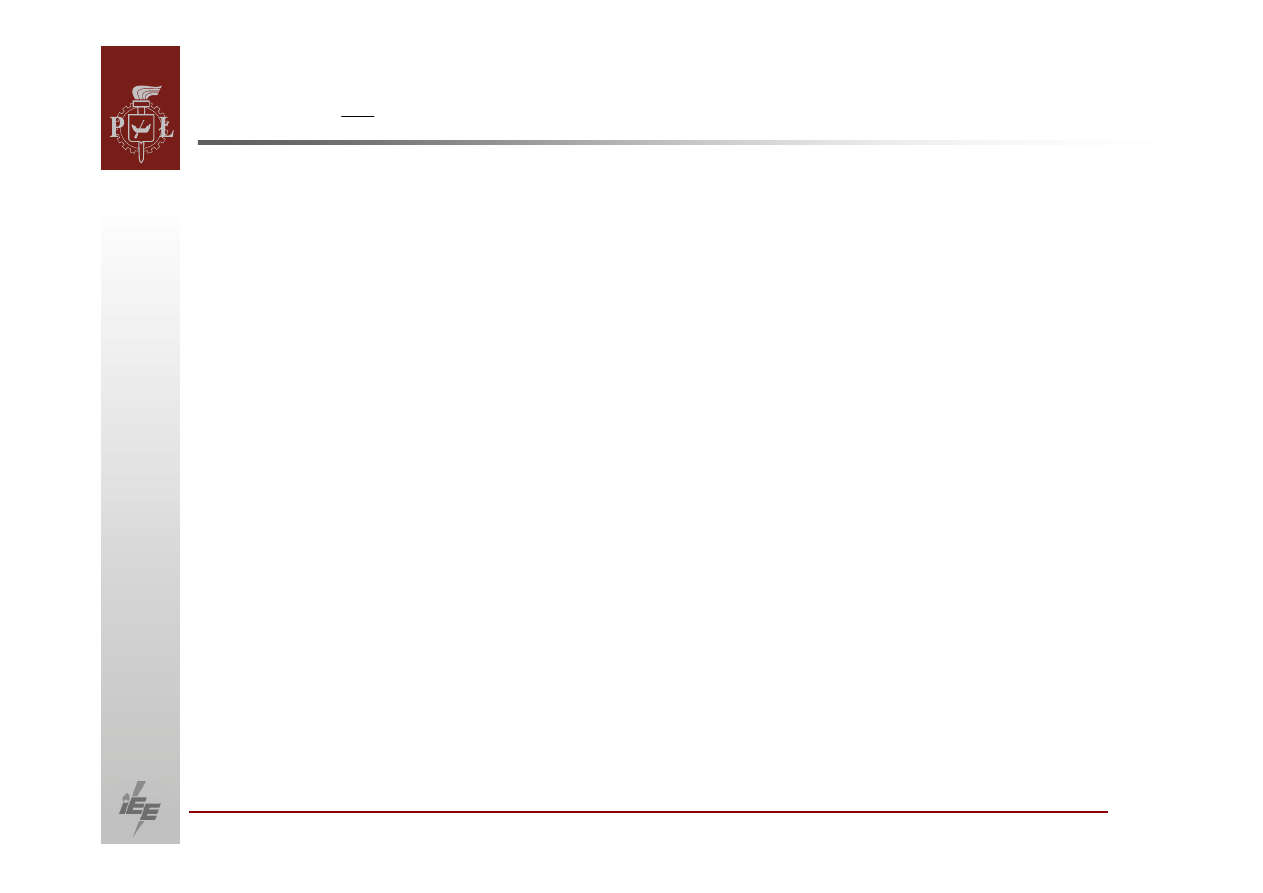
W regulatorze szybkim po zmianie obciążenia następuje natychmiastowa
zmiana napięcia wzbudzenia tak, że napięcie na zaciskach generatora pozostaje
stałe. W wyniku zamiast klasycznej zależności mocy czynnej od kąta
otrzymujemy przebieg jak na rysunku poniżej.
δ
d
P
d
28
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
7.680401
0
P1
i
P3
i
P4
i
P2
i
P6
i
3.141593
0
δ i.
0
0.5
1
1.5
2
2.5
3
3.5
0
2
4
6
8
Warunek
jest dla niej spełniony przy kącie . W aktualnie stosowanych
regulatorach osiąga się
.
0
=
δ
d
dP
°
> 90
δ
°
≈ 120
δ
δ
d
P
d
29
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
Jest to tzw. sztuczna (dynamiczna) granica równowagi statycznej. Moc
graniczna jest wtedy większa od mocy granicznej równowagi naturalnej.
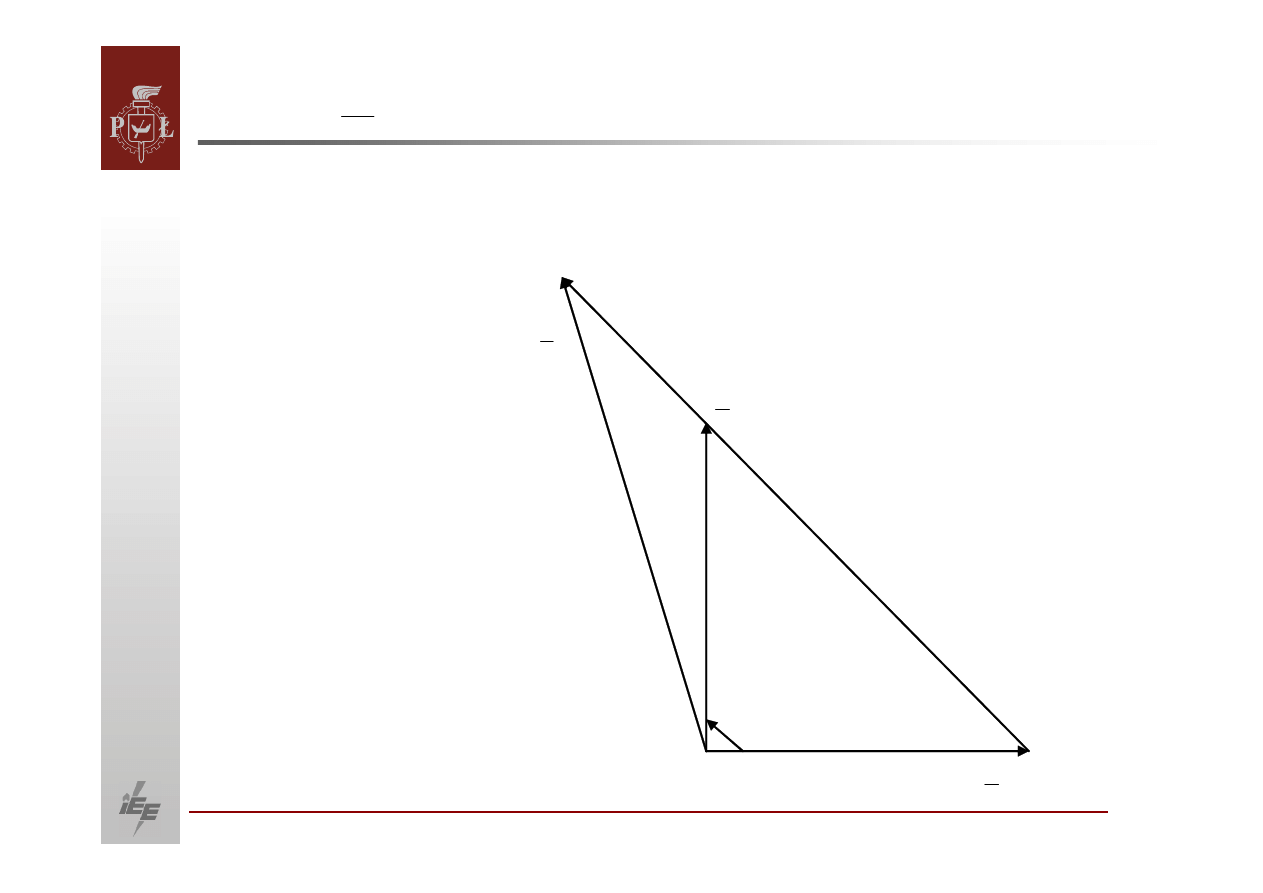
Wykres wskazowy generatora w przypadku występowania sztucznej granicy
równowagi statycznej.
g
U
d
E
o
90
S
U
δ
d
P
d
30
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryterium
Z powyższego wykresu wskazowego wynika, że kąt 90 stopni jest tu również
utrzymywany jednak nie pomiędzy siłą
elektromotoryczną
generatora
i napięciem
sieci sztywnej a pomiędzy napięciem na zaciskach generatora
i napięciem
sieci sztywnej.
Określenie punktu pracy względem granicy równowagi definiuje się
przez trzy
współczynniki zapasu stabilności statycznej:
o
o
gr
p
P
P
P
k
−
=
o
o
gr
k
δ
δ
δ
δ
−
=
o
gr
o
u
U
U
U
k
−
=
δ
d
P
d
31
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kryteria w układzie wielomaszynowym
W przestrzeni o współrzędnych zbiór punktów stabilnych
nazywamy obszarem stabilności lokalnej. Wewnątrz tego obszaru mamy stany
stabilne. Na zewnątrz niestabilne. Brzeg obszaru stabilności nazywamy
powierzchnią
stanów granicznych.
(
)
,
,
,
,
1
,
2
,
1
n
n
n
n
−
δ
δ
δ
K
δ
d
P
d
32
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Rozważymy teraz wpływ tłumienia pochodzącego od uzwojeń
tłumiących na
przebiegi kołysań
wirnika generatora. W tym celu przeanalizujemy przypadek
pracy generatora w
punkcie
stabilnym A po
pojawieniu
się
dodatkowego
obciążenia mocą
czynną. Dołączenie dodatkowej mocy powoduje, że generator
znajduje się
w
punkcie
2.
A
2
3
4
5
6 7
ω
δ
a)
b)
m
P
e
P
8
1
0.781262
P1
i
12
0
δ i.
1
0
1
ω
Δ
e
P
Δ
δ
Δ
D
e
Δ
D
i
Δ
D
P
33
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Wirnik będzie hamowany, czyli zacznie maleć
jego prędkość
obrotowa
wywołując zmniejszenie kąta i
w
konsekwencji
zmniejszenie mocy przesyłanej
z
generatora
do sieci sztywnej. Prędkość
obrotowa jest różna od
synchronicznej a więc pojawia się
poślizg i
tym
samym składnik mocy
tłumiącym w równaniu różniczkowym ruchu wirnika staje się
różny od zera.
Moc elektryczna jest zmniejszana o składnik
proporcjonalny do mocy
tłumiącej.
Ruch wirnika nie odbywa się
po charakterystyce , lecz poniżej. W wyniku
pole hamowania jest określone punktami 2, 3, 4 a nie jak poprzednio 2, 3, A.
W punkcie 4 mamy najmniejszą
prędkość
obrotową
wirnika. W tej sytuacji
wirnik również
w ruchu przyspieszającym nie osiągnie takiego kąta jak
uprzednio lecz punkt 6. Moc także nie osiągnie wartości takiej jak w
chwili
początkowej, lecz mniejszą.
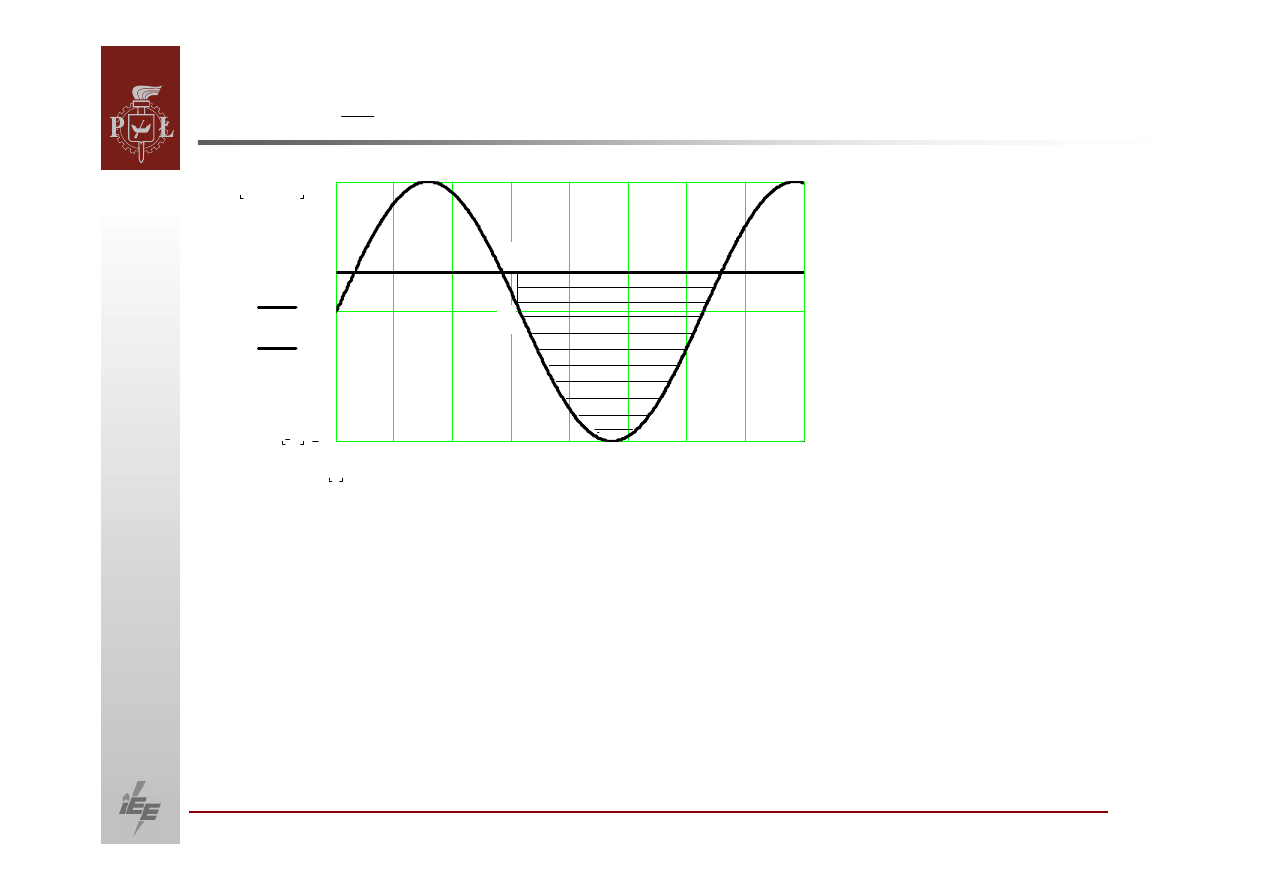
Wychylenie do punktu 5 będzie takie aby zakreskowane pole górne 2, 3, 4
(energia kinetyczna hamująca) było równe zakreskowanemu polu dolnemu
4, 5, 6 (energia kinetyczna przyspieszająca).
( )
δ
P
34
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
W punkcie 5 wirnik zaczyna mieć
dodatni poślizg (rys.
b) i
dlatego
moc tłumiąca
zmienia znak i dodaje się
do mocy elektrycznej. Krzywa zmian mocy w
funkcji
kąta leży powyżej charakterystyki mocy elektrycznej generowanej. Ruch
przebiega do punktu 5 przez 7 do 8. W punkcie 7 znów mamy równość
mocy,
lecz nie energii kinetycznych i prędkości,
dlatego drgania trwają
dalej.
Punktem końcowym tych drgań
będzie punkt A. Na rysunku b naszkicowano
początkowy przebieg prędkości obrotowej wirnika w
funkcji
kąta.
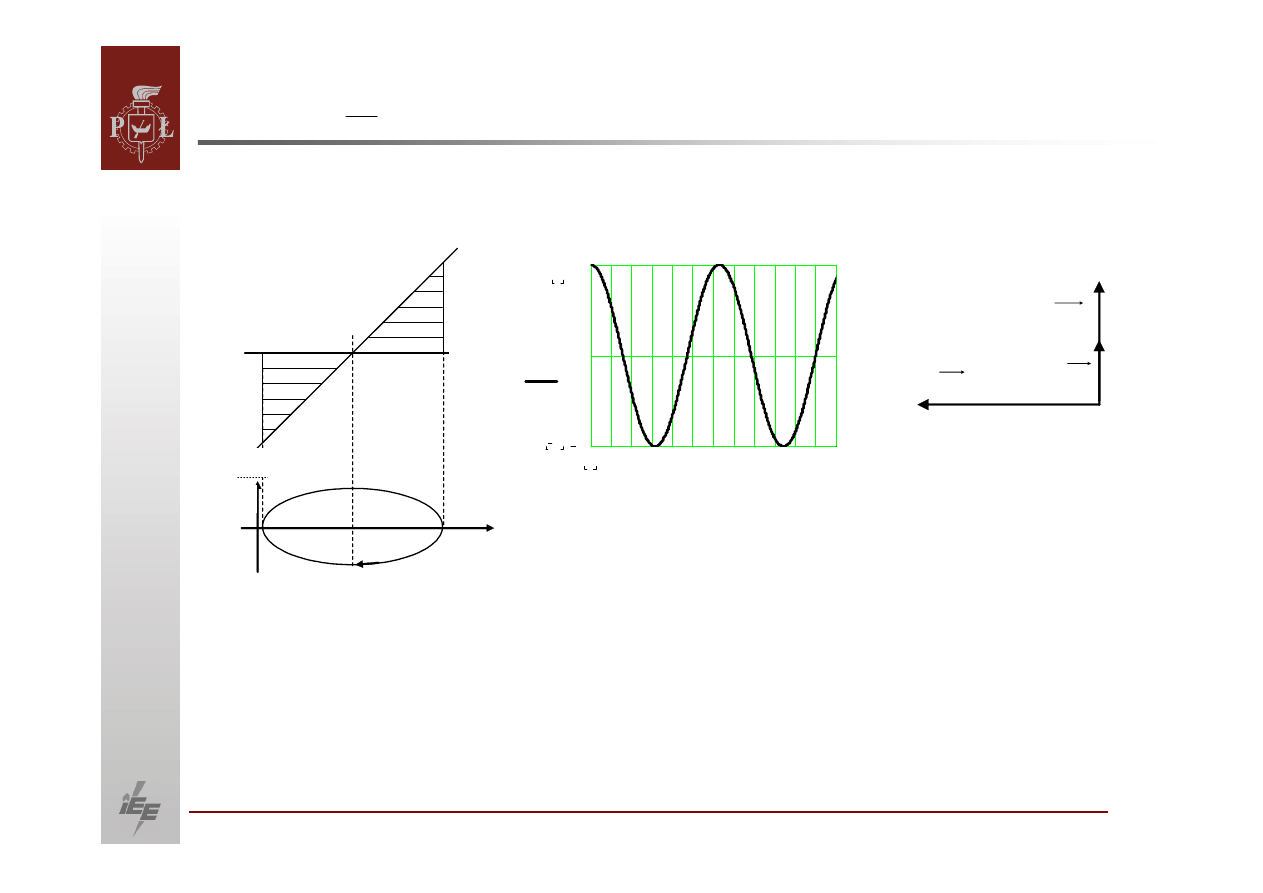
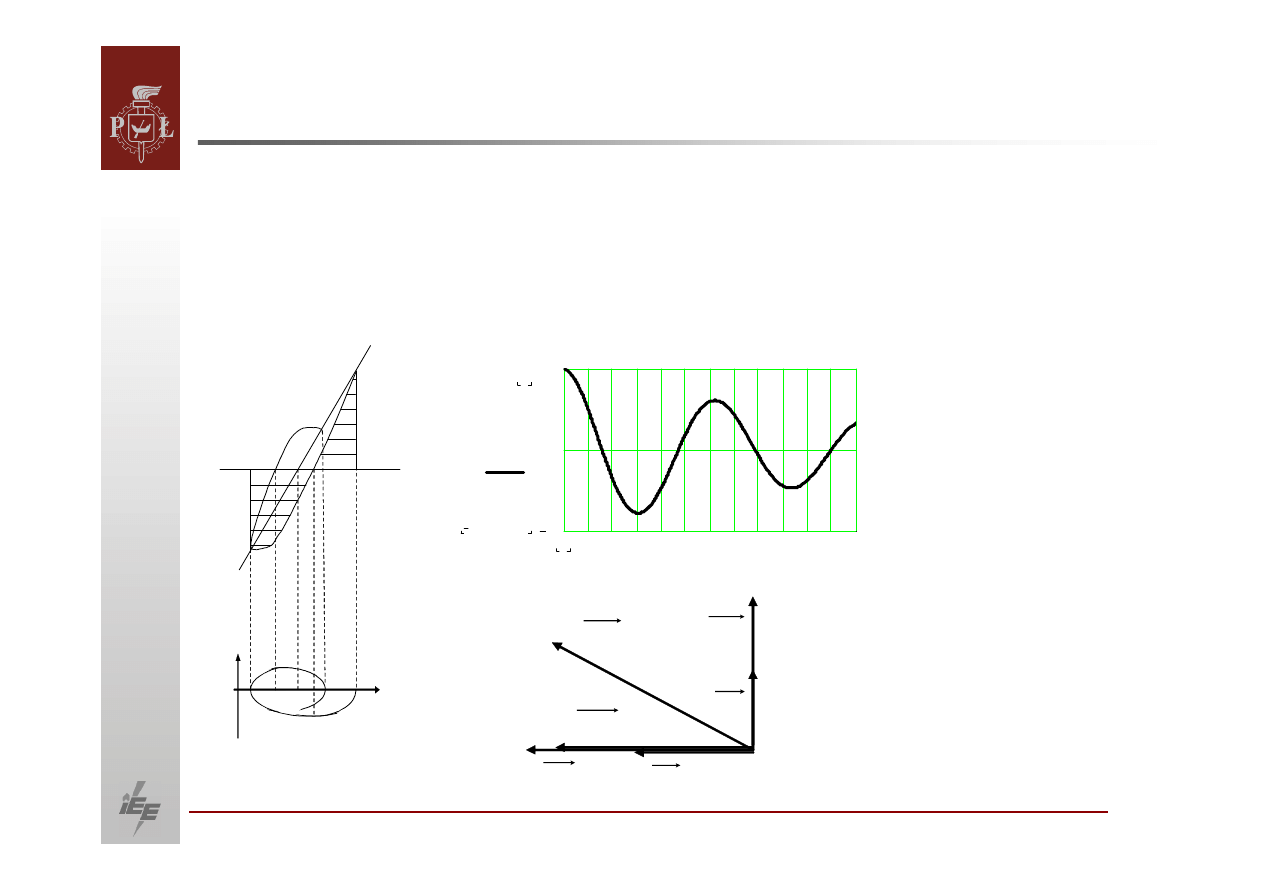
Jest to tzw. portret fazowy, czyli najlepszy widok zmiennych stanu. Rys. c
obrazuje przebieg zmian mocy czynnej w funkcji czasu. Widać
z niego
oscylacyjne tłumiony charakter tych zmian.
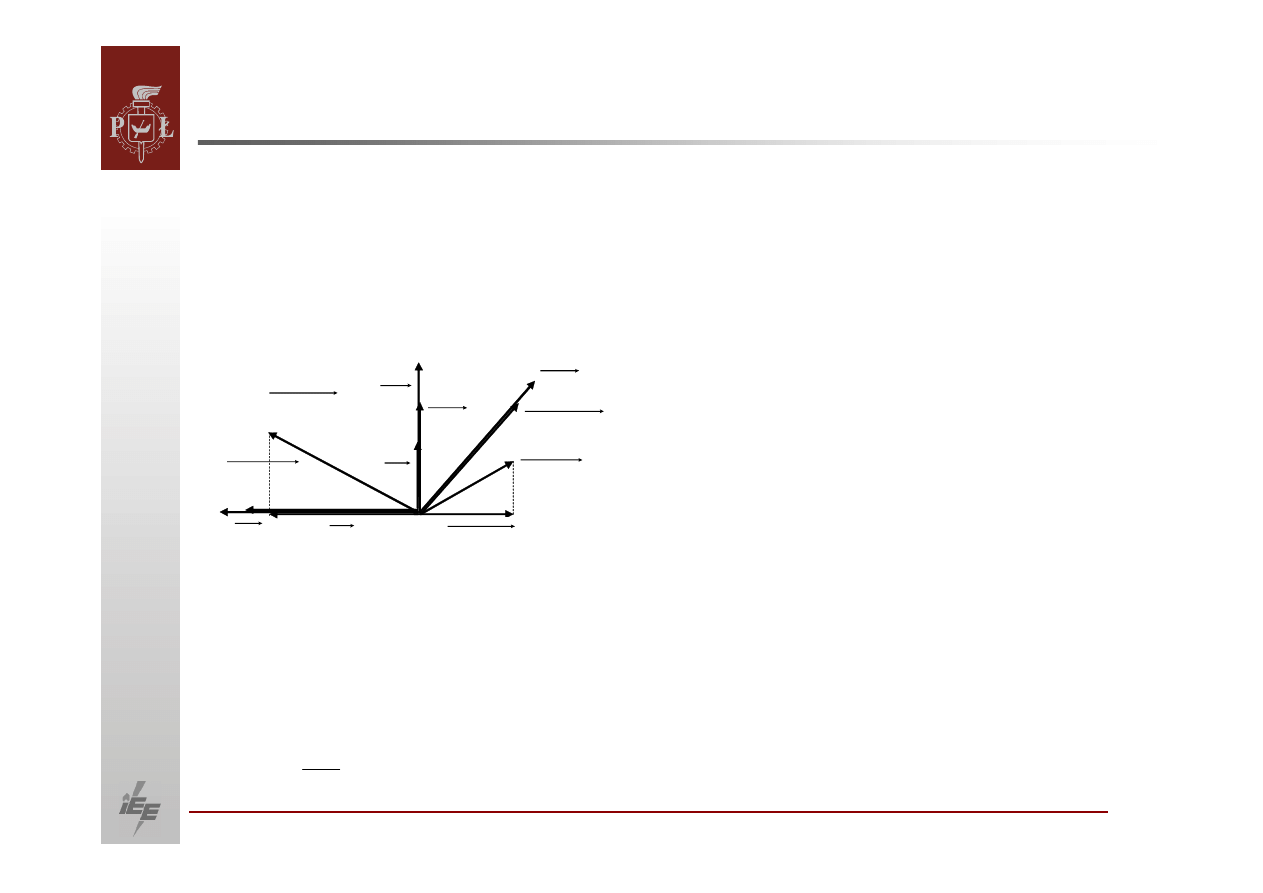
Rys.
d
obrazuje nam zmienne uczestniczące w procesie zaprezentowane jako
wektory. Tak jak poprzednio tak i
tu
zmiana prędkości obrotowej jako
pochodna zmiany kąta wyprzedza go w
fazie
o
90
stopni.
Wektor reprezentujący zmiany mocy jest w fazie z wektorem kąta. Uzwojenie
tłumiące generatora zachowuje się
jak klatka silnika asynchronicznego, jeśli
tylko pojawi się
zmiana prędkości obrotowej wirnika.
35
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
W uzwojeni tłumiącym indukuje się
siła elektromotoryczna proporcjonalna do
poślizgu i leżąca
w
fazie
z
nim. Znaczna rezystancja uzwojenia tłumiącego
powoduje, że prąd w uzwojeniu tłumiącym jest opóźniony w fazie względem
siły elektromotorycznej. Moc tłumiąca jest równa iloczynowi siły
elektromotorycznej i rzutowi prądu tłumienia na oś
siły elektromotorycznej.
Z tego rozważania widać, że rezystancja uzwojenia tłumiącego powinna być
duża w porównaniu do jego reaktancji.
Rozważymy wpływ układu regulacji napięcia na przebieg procesu kołysań
wirnika wywołanych zakłóceniem w
poborze
mocy czynnej. W tym celu
wyprowadzimy zależność
na napięcie na zaciskach generatora w
funkcji
kąta
pomiędzy jego siła elektromotoryczną
i napięciem
sieci sztywnej.
G
L
UE
36
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Prąd płynący w układzie
wynosi:
Stąd napięcie generatora:
Moduł
napięcie generatora:
(
)
X
X
j
U
e
E
I
d
S
j
d
G
+
′
−
′
=
δ
=
+
′
−
′
+
′
+
=
+
=
S
d
j
d
d
S
G
S
G
U
X
X
X
e
E
X
X
X
U
I
X
j
U
U
δ
⎥
⎦
⎤
⎢
⎣
⎡
′
+
⎟
⎠
⎞
⎜
⎝
⎛
′
+
′
+
′
=
δ
δ
sin
cos
d
d
S
d
d
E
j
E
U
X
X
X
X
X
( )
2
2
cos
2
d
d
S
d
S
d
d
G
E
E
U
X
X
U
X
X
X
X
X
U
′
+
⋅
′
⋅
⋅
′
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛ ′
+
′
=
δ
37
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Przebieg napięcia na zaciskach generatora w
funkcji
kąta.
1
0
U
i
U1
i
6.283185
0
δ i.
0
1.4
2.8
4.2
5.6
7
Z wykresu tego wynika, że podczas kołysań
wirnika wywołanych zakłóceniem
w poborze mocy czynnej powstają
znaczne zmiany napięcia generatora. Zmiany
te będą
zauważone przez regulator napięcia generatora, który obserwując
obniżenie napięcia generatorowego zareaguje i
podniesie
napięcie wzbudzenie
a
w
konsekwencji
napięcie na zaciskach generatora. Zwiększenie się
napięcia
generatorowego powyżej wartości zadanej regulatora spowoduje obniżenie
napięcia wzbudzenia, czyli napięcie na zaciskach generatora.
38
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Uzwojenie tłumiące leży w
osi
synchronicznej podłużnej maszyny. W tej
samej
osi leży uzwojenie wzbudzające generatora. W tej sytuacji zmiany prądu
wzbudzenie są
transformowane nie tylko do uzwojeń
statora, ale także do
uzwojenia tłumiącego.
Wykres wskazowy dla układu tłumienia z regulacją
wzbudzenia.
W automatycznym
regulatorze napięcia (wzbudzenia) wielkość
mierzona, czyli
napięcie i
wielkość
zadana tworzą
uchyb regulacji:
a pochodna napięcia po kącie jest ujemna w stabilnym obszarze pracy, czyli:
ω
Δ
e
P
Δ
δ
Δ
( )
ω
Δ
Δ
D
e
( )
ω
Δ
Δ
D
i
D
P
r
U
Δ
f
E
Δ
( )
f
E
D
e
Δ
Δ
( )
f
E
D
i
Δ
( )
f
E
D
P
Δ
U
U
U
zad
r
−
=
Δ
δ
δ
δ
Δ
∂
=
∂
∂
∂
−
=
r
r
K
U
U
39
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Uchyb regulacji jest wielkością
proporcjonalną
do zmian kąta i na
wykresie wskazowym jego wektor będzie w fazie z wektorem
.
Automatyczny regulator napięcia wzmacnia uchyb regulacyjny wymuszając we
wzbudnicy generatora zmianę
napięcia wzbudzenia o wartość
.
Automatyczny regulator napięcia i
wzbudnica
mają
pewną
bezwładność
to na
wykresie wskazowym wektor będzie się
opóźniał
o pewien kąt w stosunku
do wektora uchybu regulacyjnego .
To opóźnienie wynika ze stałych czasowych regulatora i
wzbudnicy. Zmiana
napięcia wzbudzenia spowoduje powstanie w uzwojeniu tłumiącym siły
elektromotorycznej . Wektor tej siły leży w fazie z wektorem
wymuszającym. Pod wpływem siły elektromotorycznej w uzwojeniu
tłumiącym popłynie prąd , którego wskaz będzie opóźniony w
stosunku do siły elektromotorycznej o pewien kąt wynikający ze stosunku
rezystancji do reaktancji obwodu tłumiącego.
Prąd płynący w uzwojeniu tłumiącym a wywołany
zmianami napięcia
wzbudzenia odejmuje się
od prądu płynącego w uzwojeniu tłumiącym
a wywołanym
zmianami prędkości obrotowej wirnika.
r
U
Δ
δ
Δ
f
E
Δ
f
E
Δ
r
U
Δ
( )
f
E
D
e
Δ
( )
f
E
D
e
Δ
( )
f
E
D
e
Δ
( )
f
E
D
i
Δ
( )
f
E
D
i
Δ
40
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Kołysania z uwzględnieniem tłumienia i
regulacji
wzbudzenia
Oznacza to, że prąd płynący w uzwojeniu tłumiącym w wyniku działania
regulatora napięcia osłabia prąd płynący w uzwojeniu tłumiącym a wywołanym
zmianami prędkości obrotowej wirnika a
w
konsekwencji
zmniejsza moc
tłumiącą.
Zostaną
teraz przeanalizowane czynniki prowadzące do pojawienia się
ujemnej
mocy tłumiącej. Wielkością
wyjściową
tej analizy był
uchyb regulacyjny
regulatora napięcia. Duży uchyb regulacyjny to w efekcie duży prąd płynący
w uzwojeniu tłumiącym w wyniku działania regulatora napięcia. Duży efekt
regulacyjny może być
spowodowany przez:
9Dużą reaktancję pomiędzy generatorem (elektrownią) a węzłem sieci
sztywnej.
9Duże obciążenie sieci.
9Duże wzmocnienie regulatora napięcia bardzo korzystne dla regulacji
napięcia (napięcie szybciej wraca do wartości zadanej), ale niekorzystne dla
tłumienia.
9Duże opóźnienie wprowadzane przez układ regulacji napięcia a więc
niekorzystna jest wzbudnica elektromaszynowa w odróżnieniu od wzbudnicy
tyrystorowej.
41
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
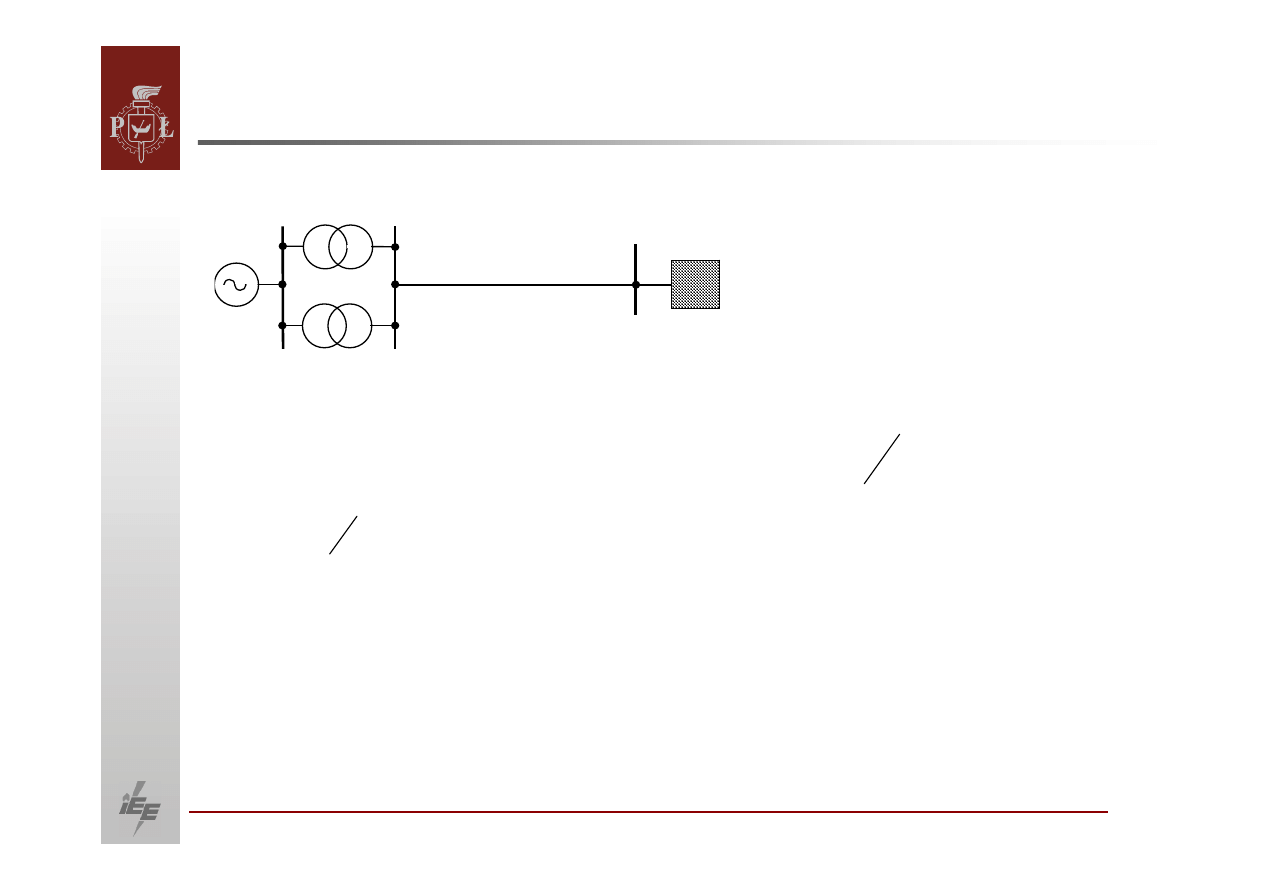
Zadanie 1
kV
5
,
10
=
G
U
Obliczyć
moc graniczną
równowagi statycznej układu.
G
T
T
L
UE
A
B
C
10 kV
220 kV
220 kV
MVA
150
=
NG
S
%
150
=
d
X
kV
5
,
10
=
NG
U
MVA
100
=
NT
S
%
12
=
Z
U
Δ
kV
10,5
kV
220
=
ϑ
km
Ω
4
,
0
=
kL
X
km
150
=
l
∞
=
Z
S
kV
215
=
S
U
Zadanie rozwiązać
dla trzech przypadków gdy generator:
9nie jest wyposażony w regulator wzbudzenia a obciążony jest mocą
9jest wyposażony w szybki regulator wzbudzenia utrzymujący
9jest wyposażony w wolny regulator wzbudzenia utrzymujący
MW
150
=
N
P
kV
5
,
10
=
G
U
1
cos
=
ϕ
kV
5
,
10
=
G
U
42
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 1
Impedancje elementów na poziomie
kV
5
,
10
Ω
10
,
1
150
5
,
10
100
150
100
2
2
=
⋅
=
⋅
=
NG
NG
d
G
S
U
X
X
Ω
0662
,
0
100
2
5
,
10
100
12
2
100
2
2
=
⋅
⋅
=
⋅
⋅
=
NT
NT
z
T
S
U
U
X
Δ
Ω
137
0
220
5
10
150
4
0
1
2
2
,
,
,
l
X
X
T
k
L
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅
=
⋅
⋅
=
ϑ
Ω
31
,
1
137
,
0
0662
,
0
10
,
1
=
+
+
=
+
+
=
∑
L
T
G
X
X
X
X
Przypadek 1: generator nie jest wyposażony w regulator wzbudzenia
kV
3
,
10
220
5
,
10
215
1
5
,
10
=
⋅
=
⋅
=
T
S
S
U
U
ϑ
=
⋅
+
=
⋅
+
=
5
,
10
10
,
1
150
5
,
10
5
,
10
5
,
10
j
U
X
P
j
U
E
G
G
G
G
G
kV
9
,
18
8
,
15
5
,
10
3
,
56
°
=
+
=
j
e
j
MW
149
31
,
1
3
,
10
9
,
18
5
.
10
=
⋅
=
⋅
=
∑
X
U
E
P
S
G
gr
43
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 1
Przypadek 2: generator jest wyposażony w szybki regulator wzbudzenia
MW
531
137
,
0
0662
,
0
3
,
10
5
,
10
5
,
10
=
+
⋅
=
+
⋅
=
L
T
S
G
gr
X
X
U
U
P
Przypadek 3: generator jest wyposażony w wolny regulator wzbudzenia
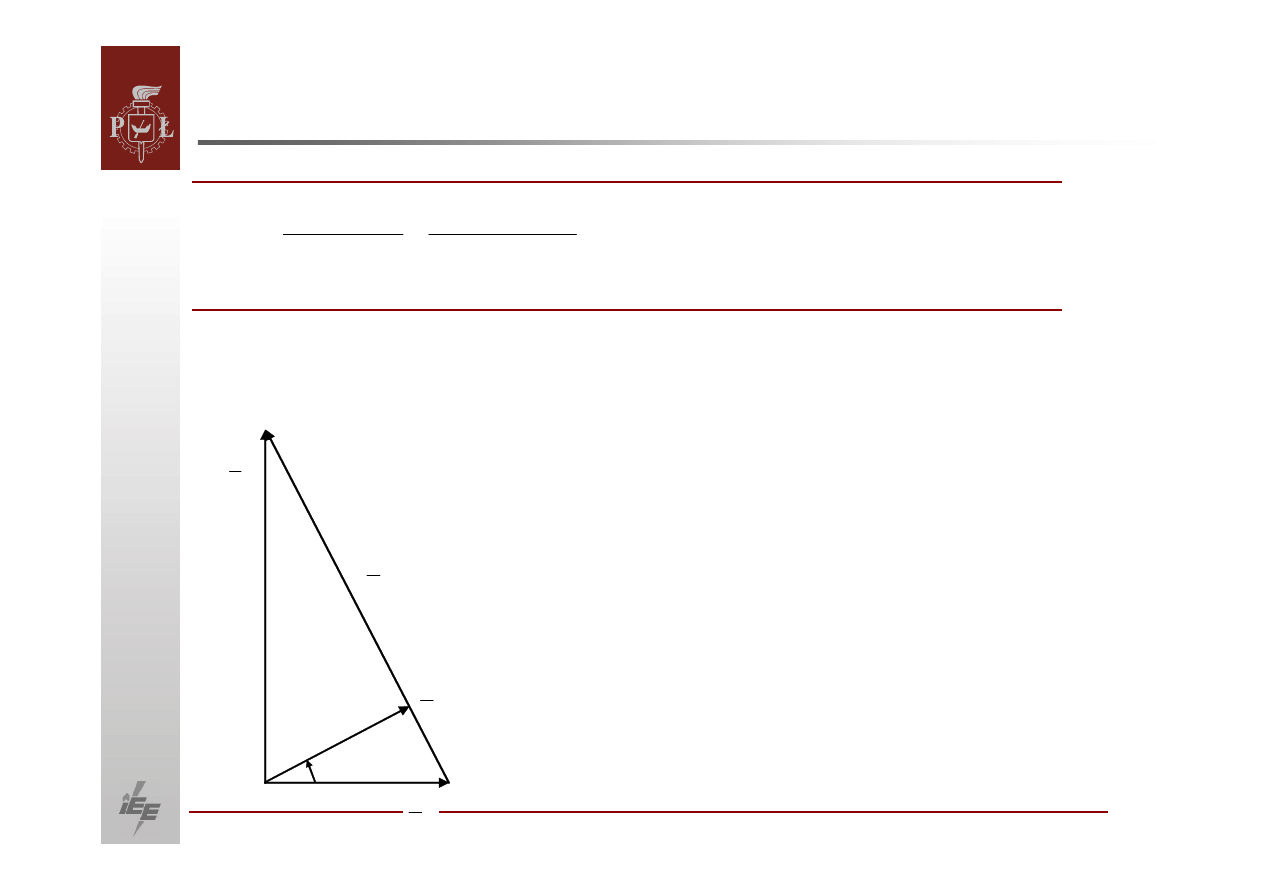
Wykres wskazowy napięcia sieci sztywnej, napięcia i siły
elektromotorycznej
generatora wyposażonego w wolny regulator wzbudzenia.
S
U
G
U
d
E
U
Δ
α
44
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 1
W celu wyznaczenia siły elektromotorycznej zastosujemy metodę
iteracyjną.
Założymy, że
°
= 20
α
kV
5
,
10
20
°
=
j
G
e
U
(
)
=
−
°
+
°
⋅
=
−
=
3
,
10
20
sin
20
cos
5
,
10
j
U
U
U
S
G
GS
Δ
(
)
kV
59
,
3
433
,
0
j
+
−
=
(
)
=
⋅
+
−
=
+
+
+
⋅
=
203
,
0
31
,
1
59
,
3
433
,
0
j
X
X
X
X
X
U
U
L
T
L
T
G
GS
Δ
Δ
(
)
kV
1
,
23
79
,
2
j
+
−
=
Część
rzeczywista straty napięcia powinna być
równa napięciu sieci sztywnej ze
znakiem minus, wniosek przyjęto zbyt mały kąt. Założymy, że
°
= 30
α
(
)
=
−
°
+
°
⋅
=
−
=
3
,
10
30
sin
30
cos
5
,
10
j
U
U
U
S
G
GS
Δ
(
)
kV
25
,
5
21
,
1
j
+
−
=
(
)
=
⋅
+
−
=
+
+
+
⋅
=
203
,
0
31
,
1
25
,
5
21
,
1
j
X
X
X
X
X
U
U
L
T
L
T
G
GS
Δ
Δ
(
)
kV
8
,
33
80
,
7
j
+
−
=
45
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 1
Założymy, że
°
= 34
α
(
)
=
−
°
+
°
⋅
=
−
=
3
,
10
34
sin
34
cos
5
,
10
j
U
U
U
S
G
GS
Δ
(
)
kV
87
,
5
60
,
1
j
+
−
=
(
)
=
⋅
+
−
=
+
+
+
⋅
=
203
,
0
31
,
1
87
,
5
60
,
1
j
X
X
X
X
X
U
U
L
T
L
T
G
GS
Δ
Δ
(
)
kV
9
,
37
3
,
10
j
+
−
=
Część
rzeczywista straty napięcia jest równa napięciu sieci sztywnej ze znakiem
minus, kąt jest właściwy.
Siła elektromotoryczna generatora jest równa części urojonej straty napięcia,
czyli:
kV
9
,
37
=
d
E
MW
298
31
,
1
3
,
10
9
,
37
5
.
10
=
⋅
=
⋅
=
∑
X
U
E
P
S
d
gr
46
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
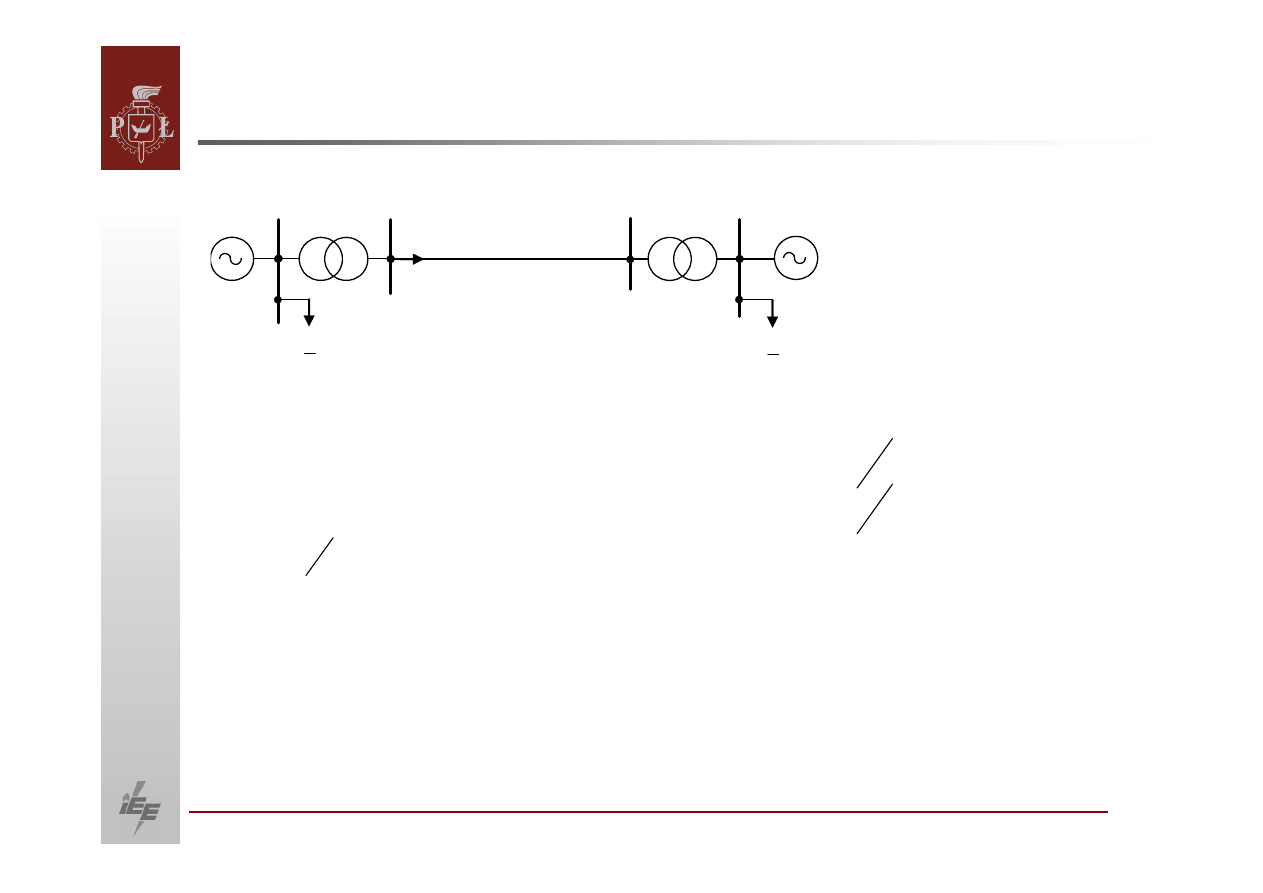
Obliczyć
moc graniczną
równowagi statycznej układu jak na rysunku.
G1
T1
1
S
L
T2
A
B
C
15 kV
110 kV
110 kV
15 kV
2
S
D
G2
LBC
P
MVA
600
1
=
NG
S
%
150
=
d
X
kV
75
,
15
1
=
NG
U
MVA
600
2
=
NG
S
%
150
=
d
X
kV
75
,
15
2
=
NG
U
MVA
315
1
=
NT
S
%
12
=
Z
U
Δ
kV
15
kV
110
=
ϑ
MVA
315
2
=
NT
S
%
12
=
Z
U
Δ
kV
15
kV
110
=
ϑ
km
Ω
4
,
0
=
kL
X
km
10
=
l
MW
200
1
=
P
ind.
8
,
0
cos
1
=
ϕ
kV
75
,
15
=
A
U
MW
200
2
=
P
ind.
8
,
0
cos
2
=
ϕ
kV
75
,
15
=
D
U
MW
100
=
LBC
P
Generator nie jest wyposażony w regulator wzbudzenia.
47
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
Impedancje elementów na poziomie
kV
15
Ω
620
,
0
600
75
,
15
100
150
100
2
2
2
1
=
⋅
=
⋅
=
=
N
N
d
G
G
S
U
X
X
X
Ω
0945
,
0
315
75
,
15
100
12
100
2
2
2
1
=
⋅
=
⋅
=
=
N
N
z
T
T
S
U
U
X
X
Δ
Ω
0744
0
110
15
10
4
0
1
2
2
,
,
l
X
X
T
k
L
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅
=
⋅
⋅
=
ϑ
Obliczenia mocy w węzłach A i D
(
)
MVA
150
200
6
,
0
8
,
0
200
200
sin
cos
1
1
1
1
1
j
j
P
j
P
S
+
=
⋅
+
=
⋅
+
=
ϕ
ϕ
(
)
MVA
150
200
6
,
0
8
,
0
200
200
sin
cos
2
2
2
2
2
j
j
P
j
P
S
+
=
⋅
+
=
⋅
+
=
ϕ
ϕ
Zastąpienie odbiorów impedancjami
(
)
Ω
5953
,
0
7938
,
0
150
200
75
,
15
2
*
1
2
1
j
j
S
U
Z
A
o
+
=
−
=
=
(
)
Ω
5953
,
0
7938
,
0
150
200
75
,
15
2
*
2
2
2
j
j
S
U
Z
D
o
+
=
−
=
=
48
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
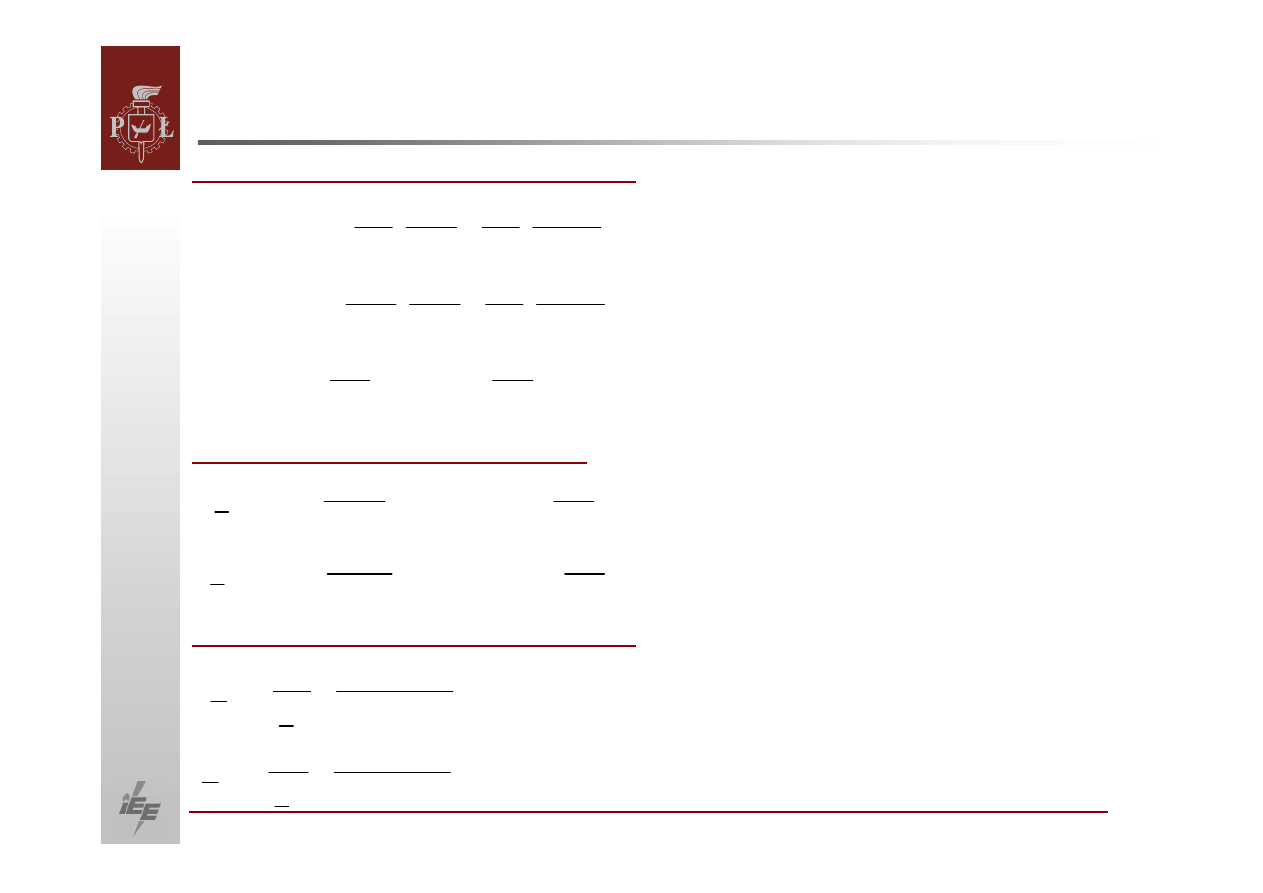
Schemat zastępczy
1
o
Z
2
o
Z
1
d
E
2
d
E
1
G
jX
2
G
jX
(
)
2
1
T
L
T
X
X
X
j
+
+
Obliczenia impedancji własnej generatora 1
(
)
=
+
+
+
⋅
=
+
⋅
=
5953
,
0
7938
,
0
620
,
0
5953
,
0
7938
,
0
620
,
0
2
2
2
2
j
j
j
j
Z
X
j
Z
X
j
Z
o
G
o
G
a
(
)
Ω
3983
,
0
1448
,
0
j
+
=
(
)
=
+
+
+
=
2
1
T
L
T
a
b
X
X
X
j
Z
Z
=
+
⋅
+
+
=
0744
,
0
2
0945
,
0
3983
,
0
1448
,
0
j
j
j
(
)
Ω
6617
,
0
1448
,
0
j
+
=
(
) (
)
=
+
+
+
+
⋅
+
=
+
=
5953
,
0
7938
,
0
6617
,
0
1448
,
0
5953
,
0
7938
,
0
6617
,
0
1448
,
0
1
1
j
j
j
j
Z
Z
Z
Z
Z
o
b
o
b
c
(
)
Ω
3757
,
0
2059
,
0
j
+
=
49
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
=
+
+
=
+
=
620
,
0
3757
,
0
2059
,
0
1
11
j
j
X
j
Z
Z
G
c
(
)
Ω
0168
,
1
9957
,
0
2059
,
0
3
,
78
°
=
+
=
j
e
j
Obliczenia impedancji własnej generatora 2
Ω
0168
,
1
3
,
78
22
o
j
e
Z
=
Obliczenia impedancji wzajemnej generator 1 ‐
generator 2
W celu obliczenia impedancji wzajemnej generator 1 ‐
generator 2 musimy
przekształcić
dwie gwiazdy występujące w schemacie zastępczym na trójkąty.
Zaczniemy od gwiazdy złożonej z impedancji:
1
G
X
j
1
o
Z
(
)
2
1
T
L
T
X
X
X
j
+
+
(
)
(
)
=
+
+
⋅
+
+
+
+
=
1
2
1
1
2
1
1
1
o
T
L
T
G
T
L
T
G
D
G
Z
X
X
X
j
X
j
X
X
X
j
X
j
Z
=
+
⋅
+
+
=
5953
,
0
7938
,
0
5906
,
0
620
,
0
2634
,
0
620
,
0
j
j
j
j
j
(
)
Ω
9822
,
0
1317
,
0
j
+
−
=
50
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
(
)
(
)
=
+
+
⋅
+
+
+
+
=
1
2
1
1
2
1
1
0
G
T
L
T
o
T
L
T
o
D
X
j
X
X
X
j
Z
X
X
X
j
Z
Z
(
)
=
⋅
+
+
+
+
=
620
,
0
2634
,
0
5953
,
0
7938
,
0
2634
,
0
5953
,
0
7938
,
0
j
j
j
j
j
(
)
Ω
1117
,
1
1310
,
1
j
+
=
Łączymy równolegle gałęzie:
0
D
Z
2
o
Z
(
) (
)
=
+
+
+
+
⋅
+
=
+
⋅
=
5953
,
0
7938
,
0
1117
,
1
131
,
1
5953
,
0
7938
,
0
1117
,
1
131
,
1
2
0
2
0
j
j
j
j
Z
Z
Z
Z
Z
o
D
o
D
DD
(
)
Ω
3916
,
0
4699
,
0
j
+
=
Przekształcamy gwiazdę
na trójkąt dla impedancji:
DD
Z
D
G
Z
1
2
G
X
j
=
⋅
+
+
=
DD
G
D
G
G
D
G
Z
X
j
Z
X
j
Z
Z
2
1
2
1
12
(
)
=
+
⋅
+
−
+
+
+
−
=
3916
,
0
4699
,
0
62
,
0
9822
,
0
1317
,
0
62
,
0
9822
,
0
1317
,
0
j
j
j
j
j
(
)
Ω
3518
,
2
1370
,
2
9819
,
0
7
,
114
°
=
+
−
=
j
e
j
51
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
Obliczenie mocy płynących z generatorów
ϑ
sin
2
1
2
1
1
⋅
+
+
⋅
=
T
L
T
G
G
A
T
X
X
X
U
U
P
(
)
1062
,
0
75
,
15
75
,
15
2634
,
0
100
sin
2
1
2
1
1
=
⋅
⋅
=
⋅
+
+
⋅
=
G
G
T
L
T
A
T
U
U
X
X
X
P
ϑ
=
⋅
⋅
−
=
ϑ
cos
2
1
2
1
2
1
2
1
1
LT
T
G
G
LT
T
G
A
T
X
U
U
X
U
Q
Mvar
3
,
5
1062
,
0
1
2634
,
0
75
,
15
2634
,
0
75
,
15
2
2
2
=
−
⋅
−
=
=
+
+
+
=
+
=
3
,
5
100
150
200
1
1
1
j
j
S
S
S
A
T
o
G
(
)
MVA
3
,
155
300
j
+
=
(
)
=
−
−
+
=
−
=
3
,
5
100
150
200
2
2
2
j
j
S
S
S
D
T
o
G
(
)
MVA
3
,
155
100
j
+
=
52
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
Obliczenia modułów sił
elektromotorycznych generatorów
=
⋅
+
⋅
+
=
1
1
1
1
1
1
1
1
G
G
G
G
G
G
G
d
U
X
P
j
U
X
Q
U
E
(
)
kV
8
,
24
8
,
11
9
,
21
75
,
15
62
,
0
300
75
,
15
62
,
0
3
,
155
75
,
15
3
,
28
°
=
+
=
⋅
+
⋅
+
=
j
e
j
j
=
⋅
+
⋅
+
=
2
2
2
2
2
2
2
2
G
G
G
G
G
G
G
d
U
X
P
j
U
X
Q
U
E
(
)
kV
2
,
22
9
,
3
9
,
21
75
,
15
62
,
0
100
75
,
15
62
,
0
3
,
155
75
,
15
2
,
10
°
=
+
=
⋅
+
⋅
+
=
j
e
j
j
Wyznaczenie mocy granicznej równowagi statycznej układu
Ω
0168
,
1
11
=
Z
°
=
7
,
11
11
α
Ω
0168
,
1
22
=
Z
Ω
3518
,
2
12
=
Z
°
=
7
,
11
22
α
°
−
=
7
,
24
12
α
kV
8
,
24
1
=
d
E
kV
2
,
22
2
=
d
E
°
=
−
=
+
=
3
,
65
7
,
24
90
90
12
α
δ
gr
53
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 2
=
⋅
+
⋅
=
12
2
1
11
11
2
1
1
sin
Z
E
E
Z
E
P
d
d
d
gr
α
MW
358
3518
,
2
2
,
22
8
,
24
7
,
11
sin
0168
,
1
8
,
24
2
=
⋅
+
⋅
=
=
⋅
−
⋅
=
12
2
1
22
22
2
2
2
sin
Z
E
E
Z
E
P
d
d
d
gr
α
MW
136
3518
,
2
8
,
24
2
,
22
7
,
11
sin
0168
,
1
2
,
22
2
−
=
⋅
−
⋅
=
357.736439
136.438108
P1
i
P2
i
3.141593
3.141593
δ i. π
4
3
2
1
0
1
2
3
4
200
100
0
100
200
300
400
P
1
P
2
1
2
3
Przebiegi mocy w funkcji kąta rozchylenia wektorów sił
elektromotorycznych
54
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
Obliczyć
czy dla układu jak na rysunku można przesłać
nadwyżkę
mocy
z
generatora
do systemu. Dla tej sytuacji obliczyć
maksymalną
długość
linii, aby
zachować
stabilną
pracę.
G
T
1
S
L
A
B
220 kV
220 kV
UE
MVA
250
=
NG
S
%
220
=
d
X
kV
75
,
15
=
NG
U
ind.
8
,
0
cos
=
NG
ϕ
MVA
250
=
NT
S
%
11
=
Z
U
Δ
kV
15
kV
31
2
=
ϑ
km
Ω
4
,
0
=
kL
X
km
50
=
l
MW
100
1
=
P
ind.
8
,
0
cos
1
=
ϕ
kV
2315
=
A
U
kV
231
=
B
U
Generator jest wyposażony w wolny regulator wzbudzenia utrzymujący stałe
napięcie na szynach A wynoszące
kV
231
55
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
Impedancje elementów na poziomie
kV
220
( )
Ω
7
,
517
15
231
250
75
,
15
100
220
100
2
2
2
2
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅
=
⋅
⋅
=
T
N
N
d
G
S
U
X
X
ϑ
Ω
48
,
23
250
231
100
11
100
2
2
=
⋅
=
⋅
=
N
N
z
T
S
U
U
X
Δ
Ω
20
50
4
,
0
=
⋅
=
⋅
=
l
X
X
k
L
Obliczenia mocy odbioru 1
(
)
MVA
0
,
75
100
6
,
0
8
,
0
100
100
sin
cos
1
1
1
1
1
j
j
P
j
P
S
+
=
⋅
+
=
⋅
+
=
ϕ
ϕ
Zastąpienie odbioru impedancją
(
)
Ω
1
,
256
5
,
341
75
100
231
2
*
1
2
1
j
j
S
U
Z
A
o
+
=
−
=
=
Obliczenia siły elektromotorycznej generatora
Ω
2
,
541
48
,
23
7
,
517
=
+
=
+
=
T
G
GT
X
X
X
56
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
=
⋅
+
⋅
+
=
A
GT
G
A
GT
G
A
d
U
X
P
j
U
X
Q
U
E
(
)
kV
3
,
469
3
,
234
7
,
406
231
2
,
541
100
231
2
,
541
75
231
9
,
29
°
=
+
=
⋅
+
⋅
+
=
j
e
j
j
Obliczenie impedancji wzajemnej generator 1 – sieć
sztywna
Przekształcamy gwiazdę
na trójkąt dla impedancji:
GT
X
j
1
o
Z
L
X
j
=
⋅
+
+
=
1
1
12
o
L
G
L
GT
Z
X
j
X
j
X
j
X
j
Z
=
+
⋅
+
+
=
1
,
256
5
,
341
20
2
,
541
20
2
,
541
j
j
j
j
j
(
)
Ω
8
,
576
4
,
576
28
,
20
0
,
92
°
=
+
−
=
j
e
j
Obliczenie czy można przesłać
nadwyżkę
mocy z generatora do systemu
°
−
=
−
=
−
=
0
,
2
92
90
90
12
12
θ
α
°
=
−
=
+
=
0
,
88
0
,
2
90
90
12
α
δ
gr
°
=
9
,
29
S
d
U
E
δ
°
=
<
°
=
0
,
88
9
,
29
gr
U
E
S
d
δ
δ
Linią
można przesłać
nadwyżkę
mocy z
generatora
do systemu.
57
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
Moc czynna płynąca linią
MW
100
100
8
,
0
250
cos
1
=
−
⋅
=
−
⋅
=
P
S
P
N
NG
L
ϕ
Moc bierna płynąca linią
0375
,
0
231
231
20
100
sin
=
⋅
⋅
=
⋅
⋅
=
S
A
L
L
U
U
X
P
ϑ
°
=
=
15
,
2
sin
ϑ
ϑ
arc
=
⋅
⋅
−
=
ϑ
cos
2
L
S
A
L
A
L
X
U
U
X
U
Q
Mvar
87
,
1
0375
,
0
1
20
231
20
231
2
2
2
=
−
⋅
−
=
Obliczenie mocy generatora
(
)
MVA
9
,
76
200
87
,
1
100
75
100
1
1
j
j
j
S
S
S
L
o
G
+
=
+
+
+
=
+
=
Obliczenie siły elektromotorycznej generatora
=
⋅
+
⋅
+
=
A
GT
G
A
GT
G
A
d
U
X
P
j
U
X
Q
U
E
1
1
(
)
kV
3
,
623
6
,
468
1
,
411
231
2
,
541
200
231
2
,
541
9
,
76
231
7
,
48
°
=
+
=
⋅
+
⋅
+
=
j
e
j
j
58
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
Obliczenie czy układ po przesłaniu nadwyżki mocy z
generatora
do systemu jest
stabilny
°
=
<
°
=
°
+
°
=
+
=
0
,
88
85
,
50
15
,
2
7
,
48
gr
U
E
U
E
A
d
S
d
δ
ϑ
δ
δ
Zwiększenie długości linii do 250 km
Ω
100
250
4
,
0
=
⋅
=
⋅
=
l
X
X
k
L
Obliczenie impedancji wzajemnej generator 1 – sieć
sztywna
=
⋅
+
+
=
1
1
12
o
L
G
L
GT
Z
jX
jX
jX
jX
Z
=
+
⋅
+
+
=
1
,
256
5
,
341
100
2
,
541
100
2
,
541
j
j
j
j
j
(
)
Ω
4
,
724
2
,
717
4
,
101
0
,
98
°
=
+
−
=
j
e
j
Moc bierna płynąca linią
1874
,
0
231
231
100
100
sin
=
⋅
⋅
=
⋅
⋅
=
S
A
L
L
U
U
X
P
ϑ
°
=
=
8
,
10
sin
ϑ
ϑ
arc
59
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
=
⋅
⋅
−
=
ϑ
cos
2
L
S
A
L
A
L
X
U
U
X
U
Q
Mvar
45
,
9
1874
,
0
1
100
231
100
231
2
2
2
=
−
⋅
−
=
Obliczenie mocy generatora
(
)
MVA
5
,
84
200
45
,
9
100
75
100
1
1
j
j
j
S
S
S
L
o
G
+
=
+
+
+
=
+
=
Obliczenie siły elektromotorycznej generatora
=
⋅
+
⋅
+
=
A
GT
G
A
GT
G
A
d
U
X
P
j
U
X
Q
U
E
1
1
(
)
=
+
=
⋅
+
⋅
+
=
6
,
468
9
,
428
231
2
,
541
200
231
2
,
541
5
,
84
231
j
j
kV
2
,
635
5
,
47
°
=
j
e
Obliczenie czy układ po przesłaniu nadwyżki mocy z
generatora
do systemu jest
stabilny
°
=
−
=
−
=
−
+
=
+
=
0
,
82
0
,
98
180
180
90
90
90
12
12
12
θ
θ
α
δ
gr
°
=
<
°
=
°
+
°
=
+
=
0
,
82
3
,
58
8
,
10
5
,
47
gr
U
E
U
E
A
d
S
d
δ
ϑ
δ
δ
60
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
Zwiększenie długości linii do 600 km
Ω
240
600
4
,
0
=
⋅
=
⋅
=
l
X
X
k
L
Obliczenie impedancji wzajemnej generator 1 – sieć
sztywna
=
⋅
+
+
=
1
1
12
o
L
G
L
GT
Z
jX
jX
jX
jX
Z
=
+
⋅
+
+
=
1
,
256
5
,
341
240
2
,
541
240
2
,
541
j
j
j
j
j
(
)
Ω
0
,
994
7
,
963
4
,
243
2
,
104
°
=
+
−
=
j
e
j
Moc bierna płynąca linią
4498
,
0
231
231
240
100
sin
=
⋅
⋅
=
⋅
⋅
=
S
A
L
L
U
U
X
P
ϑ
°
=
=
7
,
26
sin
ϑ
ϑ
arc
=
⋅
⋅
−
=
ϑ
cos
2
L
S
A
L
A
L
X
U
U
X
U
Q
Mvar
8
,
23
4498
,
0
1
240
231
240
231
2
2
2
=
−
⋅
−
=
61
STABILNOŚĆ
LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO.
Zadanie 3
Obliczenie mocy generatora
(
)
MVA
8
,
98
200
8
,
23
100
75
100
1
1
j
j
j
S
S
S
L
o
G
+
=
+
+
+
=
+
=
Obliczenie siły elektromotorycznej generatora
=
⋅
+
⋅
+
=
A
GT
G
A
GT
G
A
d
U
X
P
j
U
X
Q
U
E
1
1
(
)
=
+
=
⋅
+
⋅
+
=
6
,
468
4
,
462
231
2
,
541
200
231
2
,
541
8
,
98
231
j
j
kV
3
,
658
4
,
45
°
=
j
e
Obliczenie czy układ po przesłaniu nadwyżki mocy z
generatora
do systemu jest
stabilny
°
=
−
=
−
=
8
,
75
2
,
104
180
180
12
θ
δ
gr
°
=
<
°
=
°
+
°
=
+
=
8
75
1
72
7
26
4
45
,
,
,
,
gr
U
E
U
E
A
d
S
d
δ
ϑ
δ
δ
Document Outline
- SYSTEMY ELEKTROENERGETYCZNE Rozdział 4 STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Pojęcia stabilności
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Pojęcia stabilności
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Pojęcia stabilności
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Pojęcia stabilności
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Pojęcia stabilności
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Pojęcia stabilności
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania wirnika generatora
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania wirnika generatora
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania wirnika generatora
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Model matematyczny systemu elektroenergetycznego
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryterium
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kryteria w układzie wielomaszynowym
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Kołysania z uwzględnieniem tłumienia i regulacji wzbudzenia
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 1
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 1
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 1
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 1
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 1
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 2
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
- STABILNOŚĆ LOKALNA SYSTEMU ELEKTROENERGETYCZNEGO. Zadanie 3
Wyszukiwarka
Podobne podstrony:
Kanicki Systemy Rozdział 6
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdzial 5 id 2 Nieznany
Kanicki Systemy Rozdzial 3 id 2 Nieznany
Kanicki Systemy Rozdział 2
Kanicki Systemy Rozdział 7
Kanicki Systemy Rozdział 6
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdział 3
Kanicki Systemy Rozdział 5
Obowiązki i uprawnienia operatora systemu rozdzielczego w świetle obowiązujących postanowień Prawa e
rozdzial 1 system?nkowy i?nki ok
rozdział v funkcja systemu szkolnego w procesach reprodukcji społecznej wg szcepańskiego OTRVY22YB
więcej podobnych podstron